
Edit on GitHub
Specification
Specifications
| Item | OpenMANIPULATOR-P (RM-P60-RNH) |
|---|---|
| DOF | 6 |
| Payload | 3 kg |
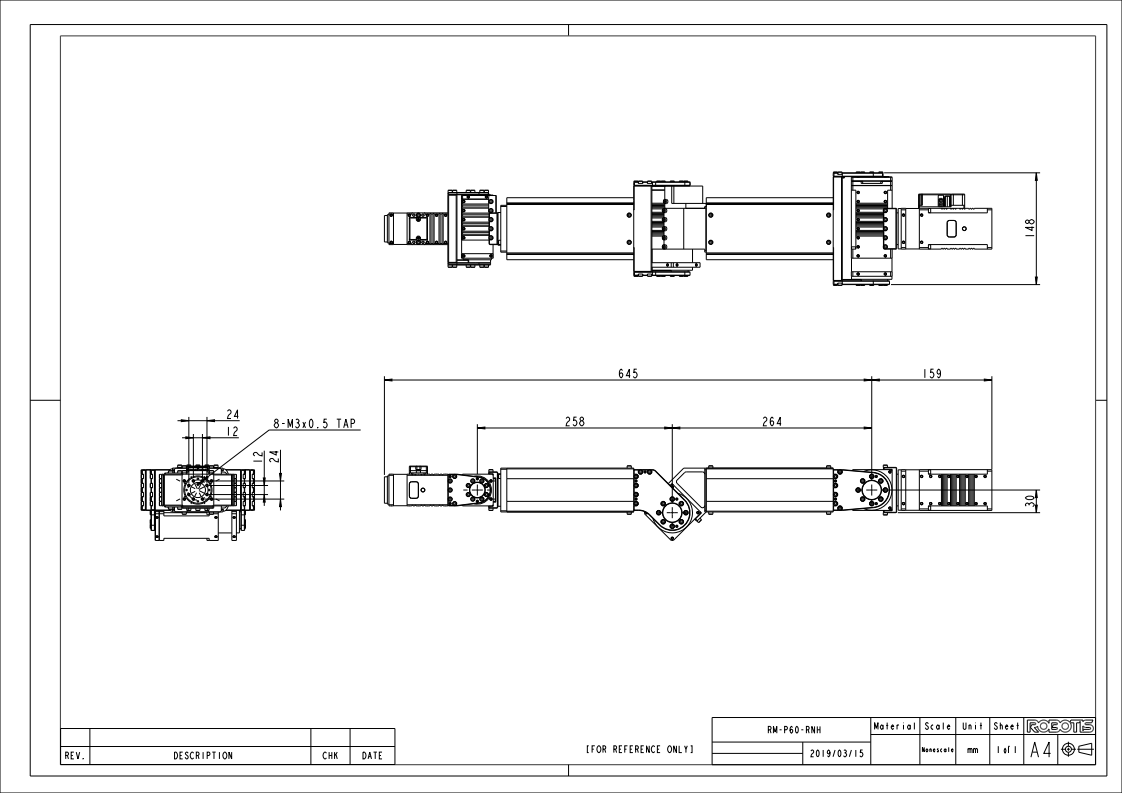
| Reach | 645 mm |
| Repeatability | ±0.05 mm |
| Weight | 5.76 kg |
| Operating voltage | 24 V |
| Resolution | Joint 1 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse) Joint 2 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse) Joint 3 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse) Joint 4 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse) Joint 5 : -π(rad) ~ π(rad) , -303,750 ~ 303,750 (pulse) Joint 6 : -π(rad) ~ π(rad) , -303,750 ~ 303,750 (pulse) |
| DYNAMIXEL Pro Model Name |
Joint 1, 2 : PH54-200-S500-R (200W) Joint 3, 4 : PH54-100-S500-R(100W) Joint 5, 6 : PH42-020-S300-R (20W) |
| Operating Range | Joint 1 : -π(rad) ~ π(rad) Joint 2 : -π/2(rad) ~ π/2(rad) Joint 3 : -π/2(rad) ~ 3π/4(rad) Joint 4 : -π(rad) ~ π(rad) Joint 5 : -π/2(rad) ~ π/2(rad) Joint 6 : -π(rad) ~ π(rad) |
| Default ID | Joint 1 (ID:1), Joint 2 (ID:2), Joint 3 (ID:3), Joint 4 (ID:4), Joint 5 (ID:5), Joint 6 (ID:6) |
| Motor type | Brushless DC Servo(H54P Series), Coreless DC Motor(H42P Series) |
| Position sensor type | Absolute Encoder(for Homing), Incremental Encoder(for Control) |
| Communications | RS485 |
| Communication Baudrate | 1000000 bps |
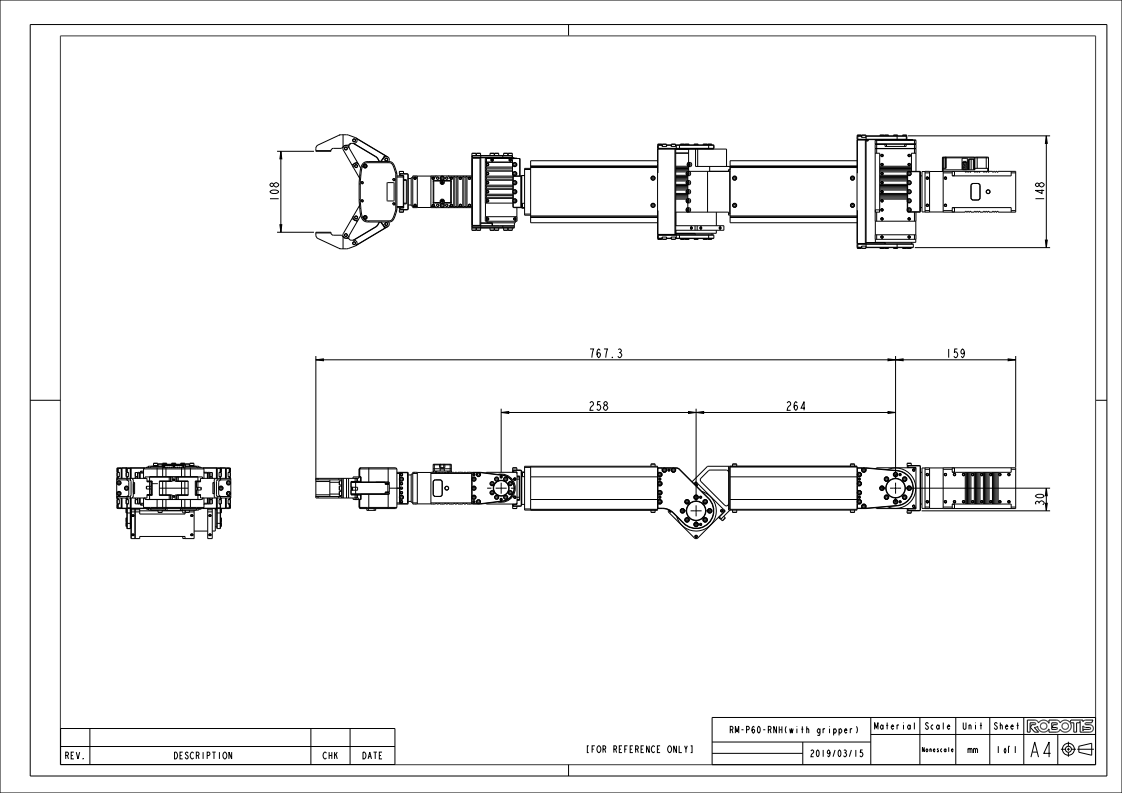
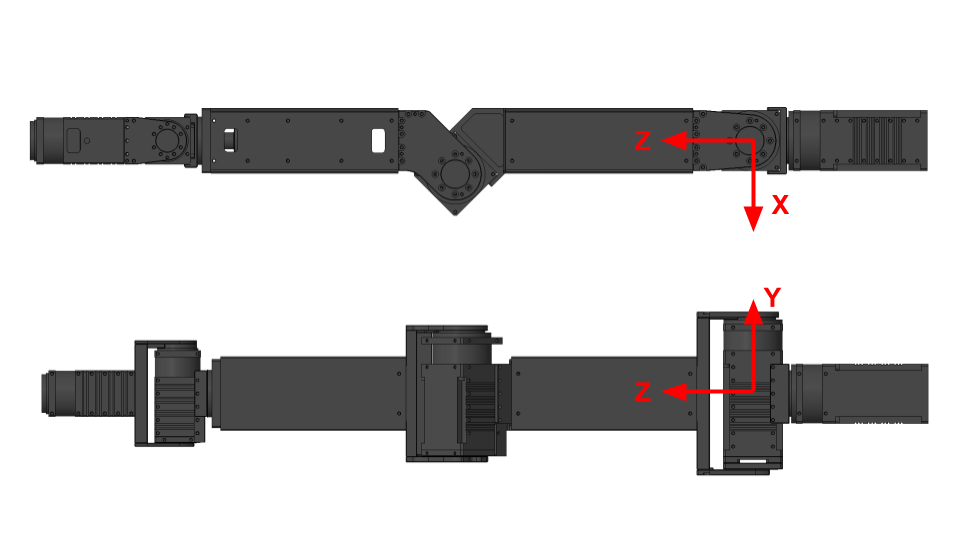
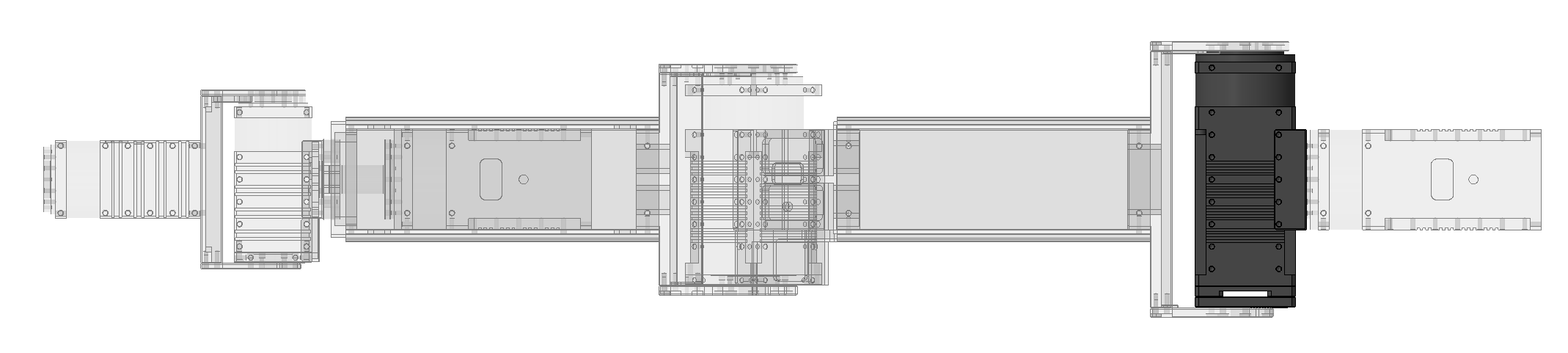
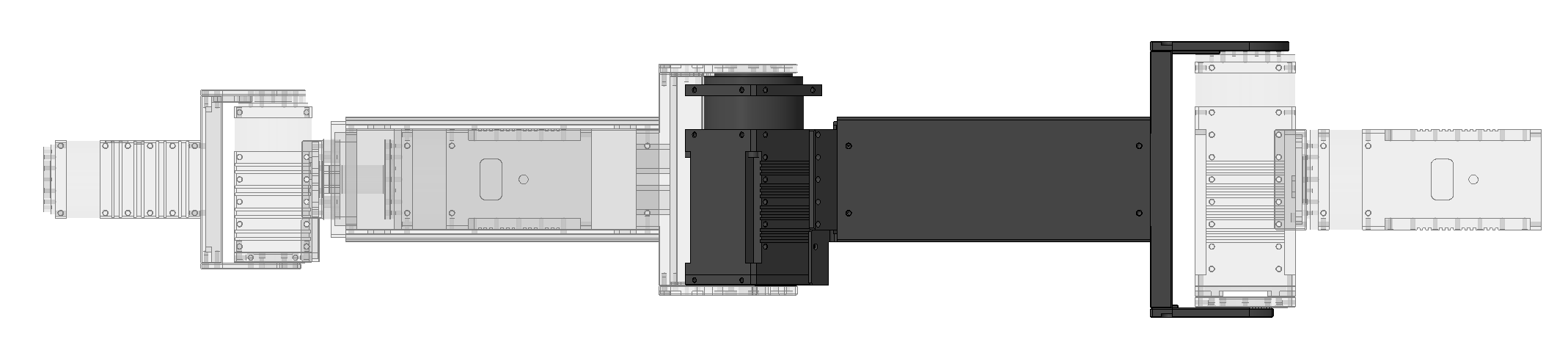
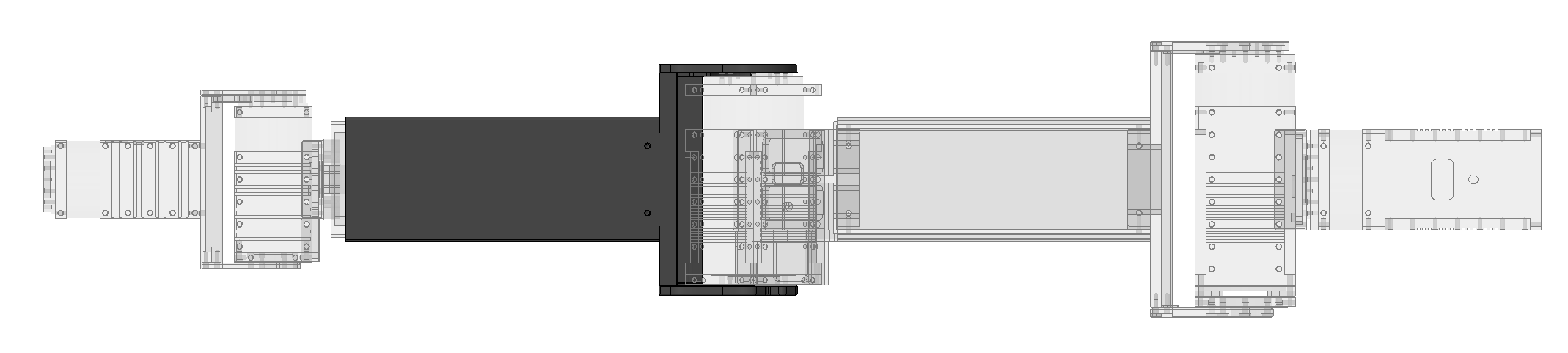
Dimension
If you have a gripper(RH-P12-RN(A)), see below.
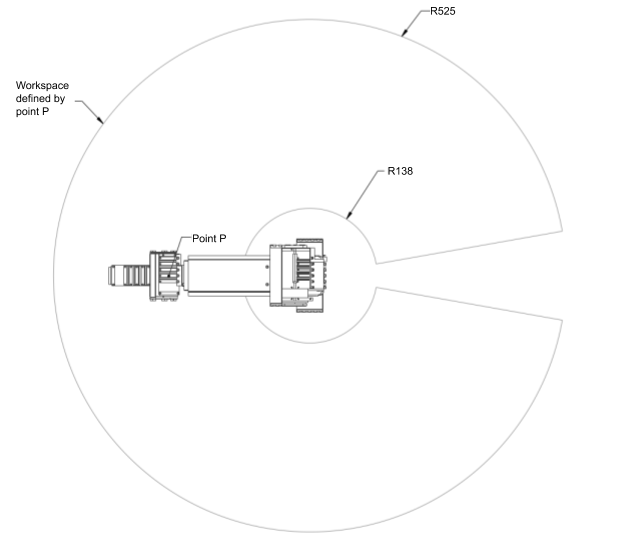
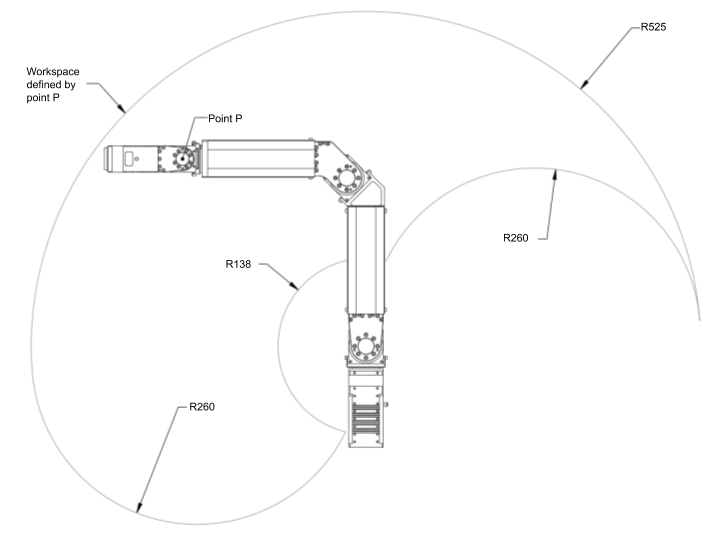
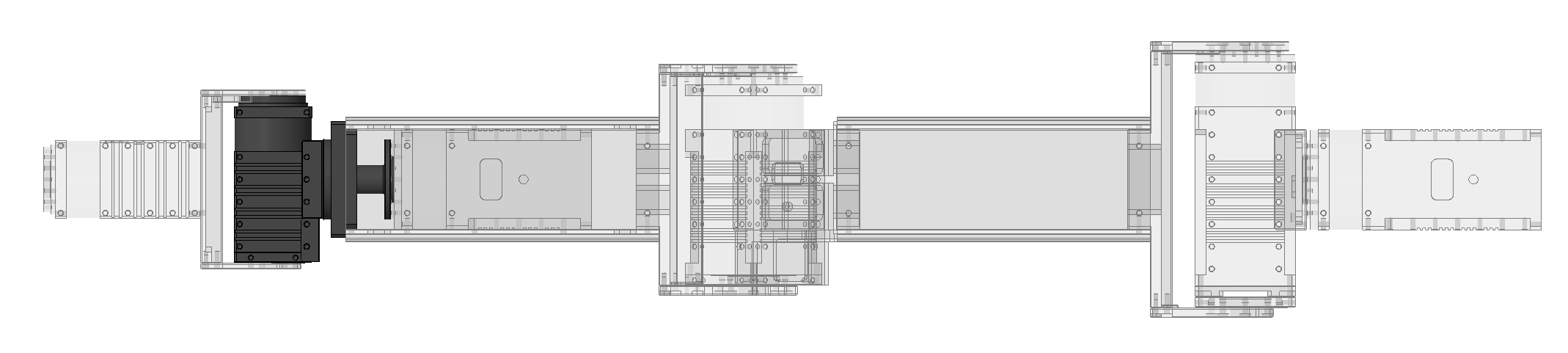
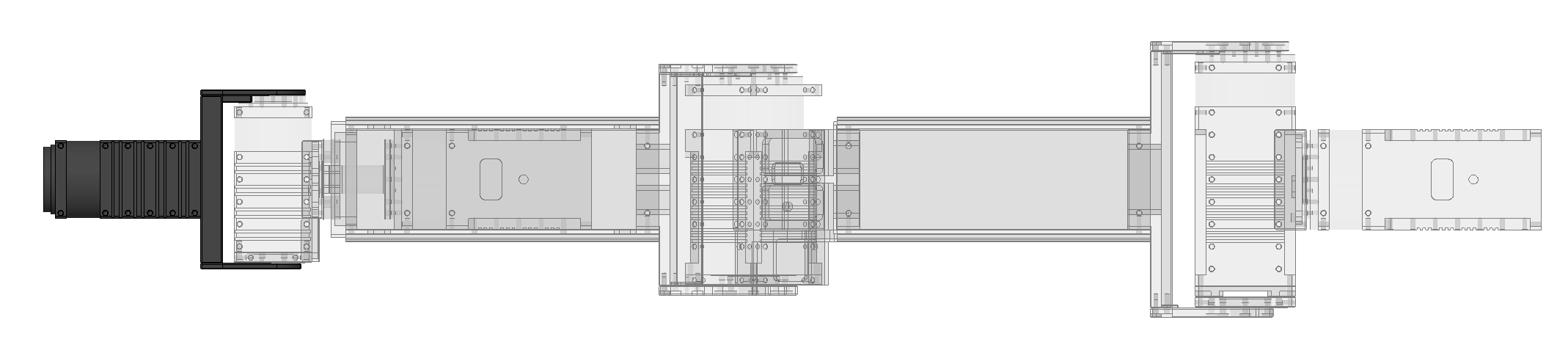
Workspace
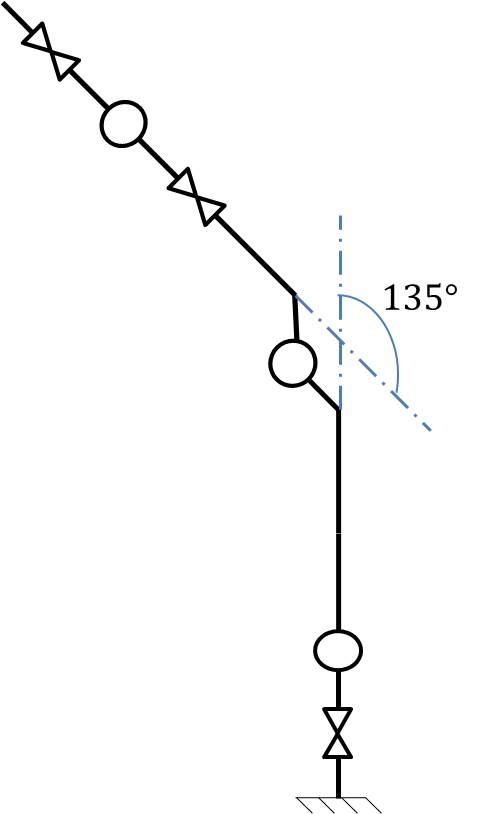
Home Position
The diagram below shows the “home position” of DYNAMIXEL-P from OpenMANIPULATOR-P.
D-H Configuration
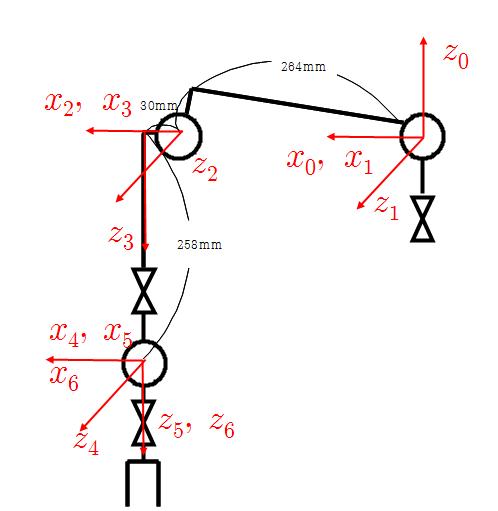
- DH Parameter
| Link | Link Length(mm) | Link Twist(rad) | Joint Offset(mm) | Joint Angle(rad) | DXL Angle(rad) |
|---|---|---|---|---|---|
| 1 | 0 | -π/2 | 0 | 0 | 0 |
| 2 | 265.69 | 0 | 0 | 0 |  |
| 3 | 30 | -π/2 | 0 | 0 |  |
| 4 | 0 | -π/2 | 258 | 0 | 0 |
| 5 | 0 | -π/2 | 0 | 0 | 0 |
| 6 | 0 | 0 | 0 | 0 | 0 |
Mass Property
Coordinate
Total Mass : 5,324g
Link 1
- Mass [Kg] : 9.4360595e-01
- Center of Gravity [m]
- x : 0.0000000e+00
- y : -1.7653633e-04
- z : -1.0030209e-03
- Inertia Tensor with respect to coordinate frame [Kg * m2]
- Ixx Ixy Ixz : 1.5694005e-03 0.0000000e+00 0.0000000e+00
- Iyx Iyy Iyz : 0.0000000e+00 4.5593385e-04 6.4581824e-09
- Izx Izy Izz : 0.0000000e+00 6.4581824e-09 1.5561809e-03
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame [Kg * m2]
- Ixx Ixy Ixz : 1.5684218e-03 0.0000000e+00 0.0000000e+00
- Iyx Iyy Iyz : 0.0000000e+00 4.5498454e-04 1.7354214e-07
- Izx Izy Izz : 0.0000000e+00 1.7354214e-07 1.5561515e-03
- Principal Moments of Inertia [Kg * m2]
- I1 : 4.5498451e-04
- I2 : 1.5561515e-03
- I3 : 1.5684218e-03
Link 2
- Mass [Kg] : 1.3825862e+00
- Center of Gravity [m]
- x : 1.5751501e-02
- y : -2.2073221e-04
- z : 1.9913687e-01
- Inertia Tensor with respect to coordinate frame [Kg * m2]
- Ixx Ixy Ixz : 6.7630430e-02 -1.9988597e-05 -5.7477571e-03
- Iyx Iyy Iyz : -1.9988597e-05 6.7208001e-02 7.4823203e-05
- Izx Izy Izz : -5.7477571e-03 7.4823203e-05 2.6031353e-03
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame [Kg * m2]
- Ixx Ixy Ixz : 1.2803228e-02 -2.4795661e-05 -1.4109928e-03
- Iyx Iyy Iyz : -2.4795661e-05 1.2037834e-02 1.4050354e-05
- Izx Izy Izz : -1.4109928e-03 1.4050354e-05 2.2600348e-03
- Principal Moments of Inertia [Kg * m2]
- I1 : 2.0744566e-03
- I2 : 1.2037112e-02
- I3 : 1.2989528e-02
Link 3
- Mass [Kg] : 1.2126965e+00
- Center of Gravity [m]
- x : 3.0352597e-04
- y : 4.1703880e-05
- z : 3.8074728e-01
- Inertia Tensor with respect to coordinate frame [Kg * m2]
- Ixx Ixy Ixz : 1.7985424e-01 -9.9417476e-07 -8.1564441e-05
- Iyx Iyy Iyz : -9.9417476e-07 1.7948679e-01 -1.7705853e-05
- Izx Izy Izz : -8.1564441e-05 -1.7705853e-05 1.1422079e-03
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame [Kg * m2]
- Ixx Ixy Ixz : 4.0514666e-03 -9.7882420e-07 5.8582868e-05
- Iyx Iyy Iyz : -9.7882420e-07 3.6839091e-03 1.5501165e-06
- Izx Izy Izz : 5.8582868e-05 1.5501165e-06 1.1420941e-03
- Principal Moments of Inertia [Kg * m2]
- I1 : 1.1409140e-03
- I2 : 3.6839076e-03
- I3 : 4.0526481e-03
Link 4
- Mass [Kg] : 4.6635550e-01
- Center of Gravity [m]
- x : -2.1388493e-06
- y : -2.2290515e-03
- z : 5.1387207e-01
- Inertia Tensor with respect to coordinate frame [Kg * m2]
- Ixx Ixy Ixz : 1.2357713e-01 -1.9465317e-09 5.1228604e-07
- Iyx Iyy Iyz : -1.9465317e-09 1.2339567e-01 5.3769657e-04
- Izx Izy Izz : 5.1228604e-07 5.3769657e-04 3.3216863e-04
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame [Kg * m2]
- Ixx Ixy Ixz : 4.2687885e-04 0.0000000e+00 0.0000000e+00
- Iyx Iyy Iyz : 0.0000000e+00 2.4774029e-04 3.5109263e-06
- Izx Izy Izz : 0.0000000e+00 3.5109263e-06 3.2985146e-04
- Principal Moments of Inertia [Kg * m2]
- I1 : 2.4759044e-04
- I2 : 3.3000130e-04
- I3 : 4.2687885e-04
Link 5
- Mass [Kg] : 4.2561606e-01
- Center of Gravity [m]
- x : -2.1268822e-06
- y : 1.8039922e-04
- z : 5.9028250e-01
- Inertia Tensor with respect to coordinate frame [Kg * m2]
- Ixx Ixy Ixz : 1.4881319e-01 0.0000000e+00 5.3435266e-07
- Iyx Iyy Iyz : 0.0000000e+00 1.4872708e-01 -4.3708754e-05
- Izx Izy Izz : 5.3435266e-07 -4.3708754e-05 2.1040082e-04
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame [Kg * m2]
- Ixx Ixy Ixz : 5.1431341e-04 0.0000000e+00 0.0000000e+00
- Iyx Iyy Iyz : 0.0000000e+00 4.2820999e-04 1.6136111e-06
- Izx Izy Izz : 0.0000000e+00 1.6136111e-06 2.1038697e-04
- Principal Moments of Inertia [Kg * m2]
- I1 : 2.1037502e-04
- I2 : 4.2822194e-04
- I3 : 5.1431341e-04