
Edit on GitHub
Specification
Hardware Specification
| Items | Unit | OpenMANIPULATOR-X |
|---|---|---|
| Actuator | DYNAMIXEL XM430-W350-T | |
| Input Voltage | V | 12 |
| DOF | - | 5 (4 DOF + 1 DOF Gripper) |
| Payload | g | 500 |
| Repeatability | mm | < 0.2 |
| Speed(Joint) | RPM | 46 |
| Weight | kg (lb) | 0.70 (1.54) |
| Reach | mm (in) | 380 (14.9) |
| Gripper Stroke | mm (in) | 20~75 (0.79~2.95) |
| Communication | - | TTL Level Multidrop BUS |
| Software | - | ROS, DYNAMIXEL SDK, Arduino, Processing |
| Main Controller | - | PC, OpenCR |
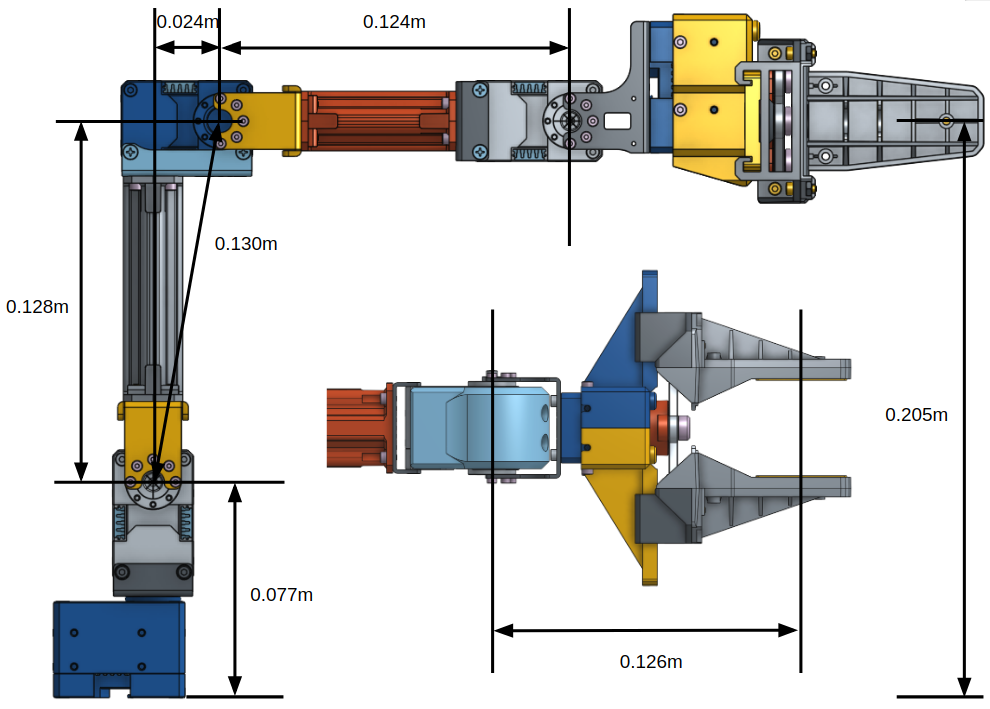
Dimension
Inertia
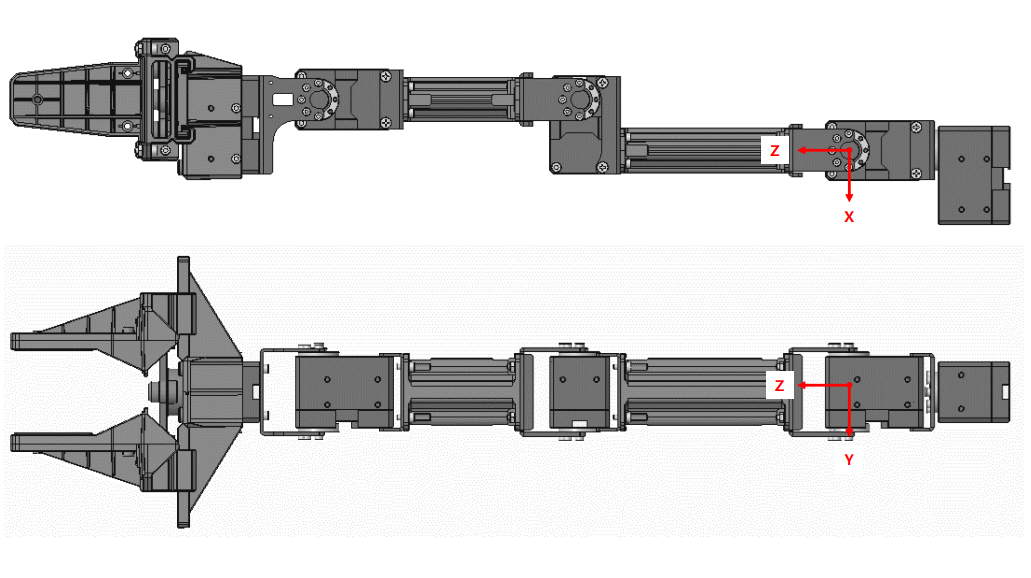
Total Mass : 711.37 gram
Joint 1
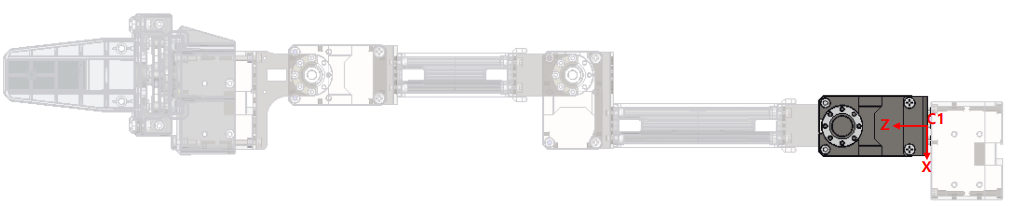
- Mass [gram] : 1.0483260e+02
- Center of Gravity [mm]
- X : 0.0000000e+00
- Y : -5.6914372e-01
- Z : 2.6565513e+01
- Inertia Tensor with respect to C1 coordinate frame: [GRAM * MM^2]
- Ixx Ixy Ixz : 1.0781918e+05 0.0000000e+00 0.0000000e+00
- Iyx Iyy Iyz : 0.0000000e+00 1.0355255e+05 1.8062416e+03
- Izx Izy Izz : 0.0000000e+00 1.8062416e+03 1.7644210e+04
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [GRAM * MM^2]
- Ixx Ixy Ixz : 3.3802078e+04 0.0000000e+00 0.0000000e+00
- Iyx Iyy Iyz : 0.0000000e+00 2.9569411e+04 2.2121514e+02
- Izx Izy Izz : 0.0000000e+00 2.2121514e+02 1.7610252e+04
- Principal Moments of Inertia: [GRAM * MM^2]
- I1 : 1.7606162e+04
- I2 : 2.9573501e+04
- I3 : 3.3802078e+04
Joint 2

- Mass [gram] : 1.4234630e+02
- Center of Gravity [mm]
- X : -9.1617228e+00
- Y : -4.1915210e-01
- Z : 1.0599936e+02
- Inertia Tensor with respect to C2 coordinate frame: [GRAM * MM^2]
- Ixx Ixy Ixz : 1.8365231e+06 -8.2177190e+02 1.6490470e+05
- Iyx Iyy Iyz : -8.2177190e+02 1.8562153e+06 7.6370887e+03
- Izx Izy Izz : 1.6490470e+05 7.6370887e+03 5.4940213e+04
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [GRAM * MM^2]
- Ixx Ixy Ixz : 2.3711450e+05 -2.7513999e+02 2.6666982e+04
- Iyx Iyy Iyz : -2.7513999e+02 2.4488355e+05 1.3126636e+03
- Izx Izy Izz : 2.6666982e+04 1.3126636e+03 4.2967059e+04
- Principal Moments of Inertia: [GRAM * MM^2]
- I1 : 3.9362142e+04
- I2 : 2.4070845e+05
- I3 : 2.4489452e+05
Joint 3
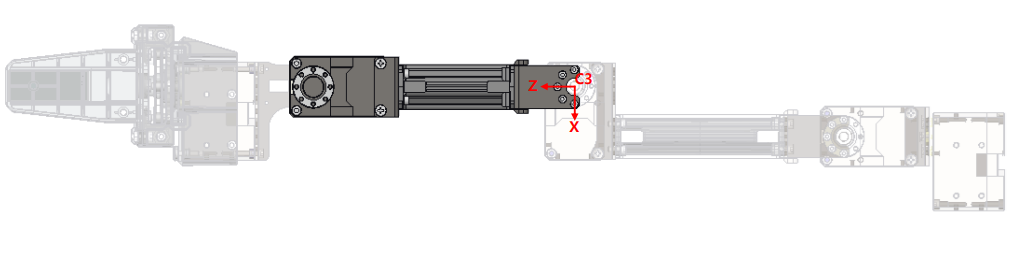
- Mass [gram] : 1.3467049e+02
- Center of Gravity [mm]
- X : 3.6312773e-04
- Y : -4.4304274e-01
- Z : 9.3290225e+01
- Inertia Tensor with respect to C3 coordinate frame: [GRAM * MM^2]
- Ixx Ixy Ixz : 1.3589608e+06 0.0000000e+00 -2.7331036e+00
- Iyx Iyy Iyz : 0.0000000e+00 1.3502276e+06 6.7882502e+03
- Izx Izy Izz : -2.7331036e+00 6.7882502e+03 2.4835638e+04
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [GRAM * MM^2]
- Ixx Ixy Ixz : 1.8688812e+05 0.0000000e+00 1.8290300e+00
- Iyx Iyy Iyz : 0.0000000e+00 1.7818139e+05 1.2221090e+03
- Izx Izy Izz : 1.8290300e+00 1.2221090e+03 2.4809204e+04
- Principal Moments of Inertia: [GRAM * MM^2]
- I1 : 2.4799466e+04
- I2 : 1.7819113e+05
- I3 : 1.8688812e+05
Joint 4
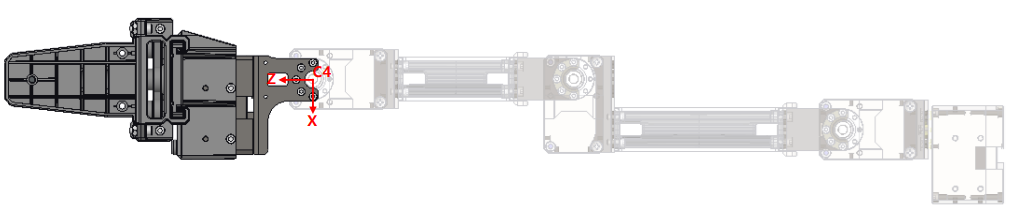
- Mass [gram] : 2.3550927e+02
- Center of Gravity [mm]
- X : 6.1273313e+00
- Y : 7.9503949e-04
- Z : 6.0472935e+01
- Inertia Tensor with respect to C4 coordinate frame: [GRAM * MM^2]
- Ixx Ixy Ixz : 1.1283350e+06 2.2172215e+02 -6.4649200e+04
- Iyx Iyy Iyz : 2.2172215e+02 1.0777914e+06 3.9825896e+00
- Izx Izy Izz : -6.4649200e+04 3.9825896e+00 1.8277436e+05
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [GRAM * MM^2]
- Ixx Ixy Ixz : 2.6708326e+05 2.2286943e+02 2.2615865e+04
- Iyx Iyy Iyz : 2.2286943e+02 2.0769766e+05 1.5305492e+01
- Izx Izy Izz : 2.2615865e+04 1.5305492e+01 1.7393236e+05
- Principal Moments of Inertia: [GRAM * MM^2]
- I1 : 1.6873182e+05
- I2 : 2.0769694e+05
- I3 : 2.7228452e+05