태스크 코드 다운로드
CM-5
바이올로이드 초급/종합 키트에서 사용되는 제어기인 CM-5 에 로보플러스 프로그램을 사용하기 위해서는 반드시 펌웨어 업데이트가 필요합니다. 펌웨어 업데이트 방법은 로보프러스 매니저의 펌웨어 업데이트를 참고하세요.
태스크 코드 다운로드 준비
- 다운로드 할 태스크 코드 파일(*.tsk)을 RoboPlus Task에서 불러 옵니다.
- 태스크 코드 파일을 더블클릭하여 열 수 있습니다.
- RoboPlus Task 의 파일 열기 기능으로 열 수 있습니다.
- 마우스를 이용하여 파일을 RoboPlus Task 위로 드래그 앤 드롭(Drag & Drop)을 통해 열 수 있습니다.
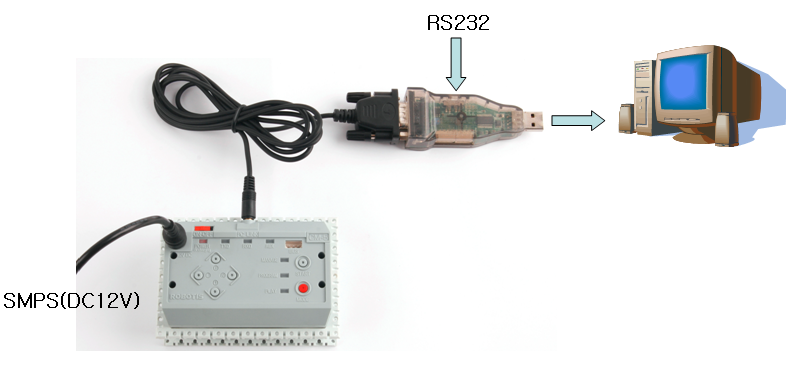
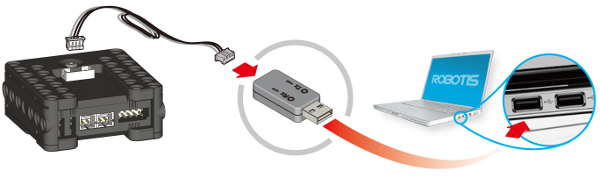
- USB2DYNAMIXEL을 이용하여 PC 와 제어기를 연결합니다.
- 제어기의 전원을 켭니다. (전원을 켜는 방법은 각 제어기 정보를 참고하세요.)
태스크 코드 다운로드
-
PC 와 제어기가 연결되어야 합니다.
태스크 코드를 다운로드하기 위해서는 PC 와 제어기가 연결되어야 합니다. (연결 방법은 각 제어기 정보를 참고하세요.) -
사용할 통신 포트를 선택해야 합니다.
자동 찾기 기능을 이용하면 쉽게 통신 포트를 설정할 수 있습니다.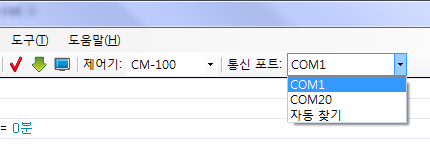
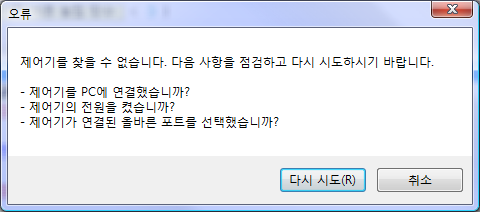
- RoboPlus Task 가 제어기를 찾지 못하면 아래와 같은 에러 메시지가 나타납니다.
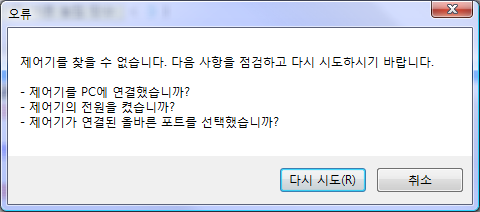
- PC 와 제어기가 연결되어 있는지 확인합니다. (연결 방법은 각 제어기 정보를 참고하세요.)
- 제어기의 전원이 켜져 있는지 확인합니다.
- 제어기가 연결된 통신 포트가 바르게 선택되어 있는지 확인합니다.
-
다운로드 메뉴를 선택합니다.

만약, 프로그램에 오류가 있다면 오류를 찾아 수정해야 합니다. (룰 체크 에러 메시지 확인)
-
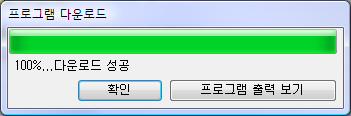
다운로드를 진행합니다.
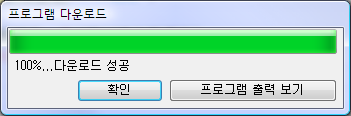
만약 다운로드에 실패했다면 처음부터 다시 시도합니다.
-
태스크 코드(Task Code)를 실행합니다. 로봇의 동작을 실행 합니다.
제어기를 켜고 다운로드 한 태스크 코드를 실행합니다. (태스크 코드 실행 방법은 각 제어기 정보를 참고하세요.)
CM-100
준비
- 다운로드 할 태스크 코드 파일(*.tsk)을 RoboPlus Task에서 불러 옵니다.
- 태스크 코드 파일을 더블클릭하여 열 수 있습니다.
- RoboPlus Task 의 파일 열기 기능으로 열 수 있습니다.
- 마우스를 이용하여 파일을 RoboPlus Task 위로 드래그 앤 드롭(Drag & Drop)을 통해 열 수 있습니다.
- USB 다운로더(LN-101)를 이용하여 PC 와 제어기(CM-100)를 연결합니다.
- 건전지(AA)2개 를 연결후 제어기(CM-100)의 전원을 켭니다.
다운로드
-
PC 와 제어기가 연결되어야 합니다.
태스크 코드를 다운로드하기 위해서는 PC 와 제어기가 연결되어야 합니다. (연결 방법은 각 제어기 정보를 참고하세요.) -
사용할 통신 포트를 선택해야 합니다.
자동 찾기 기능을 이용하면 쉽게 통신 포트를 설정할 수 있습니다.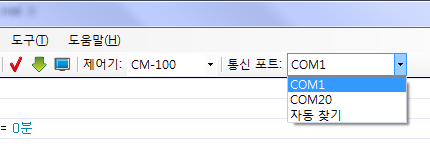
RoboPlus Task 가 제어기를 찾지 못하면 아래와 같은 에러 메시지가 나타납니다.
- PC 와 제어기가 연결되어 있는지 확인합니다. (연결 방법은 각 제어기 정보를 참고하세요.)
- 제어기의 전원이 켜져 있는지 확인합니다.
- 제어기가 연결된 통신 포트가 바르게 선택되어 있는지 확인합니다.
-
다운로드 메뉴를 선택합니다.

만약, 프로그램에 오류가 있다면 오류를 찾아 수정해야 합니다. (룰 체크 에러 메시지 확인)
-
다운로드를 진행합니다.
만약 다운로드에 실패했다면 처음부터 다시 시도합니다.
-
태스크 코드(Task Code)를 실행하고 로봇의 동작을 실행 합니다.
제어기를 켜고 다운로드 한 태스크 코드를 실행합니다. (태스크 코드 실행 방법은 각 제어기 정보를 참고하세요.)
CM-150
준비
-
PC에 R+Task 2.0 소프트웨어가 설치되어 있어야 합니다.
R+Task 2.0 다운로드 - 다운로드할 태스크 코드 파일(*.tsk)을 R+Task 에서 불러옵니다.
- 태스크 코드 파일을 더블클릭하여 열 수 있습니다.
- R+Task의 파일열기 기능으로 열 수 있습니다.
-
제어기(CM-150)를 충전배터리(LB-041)와 연결한 후 제어기의 전원을 켭니다.
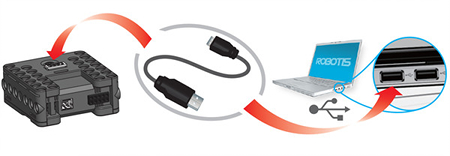
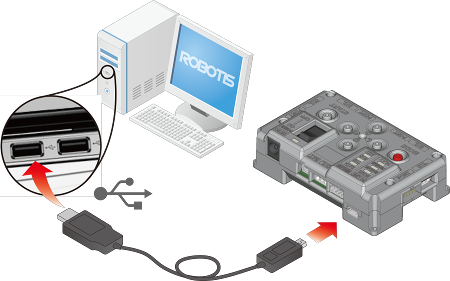
- 마이크로 USB케이블 사용해 PC와 제어기(CM-150)을 연결합니다.
다운로드
-
PC와 제어기가 마이크로 USB로 연결되어 있는지 확인합니다.
-
제어기(CM-150)의 전원이 켜져 있는지 확인합니다.
-
아래 그림을 참고하여 장치
1를 선택합니다.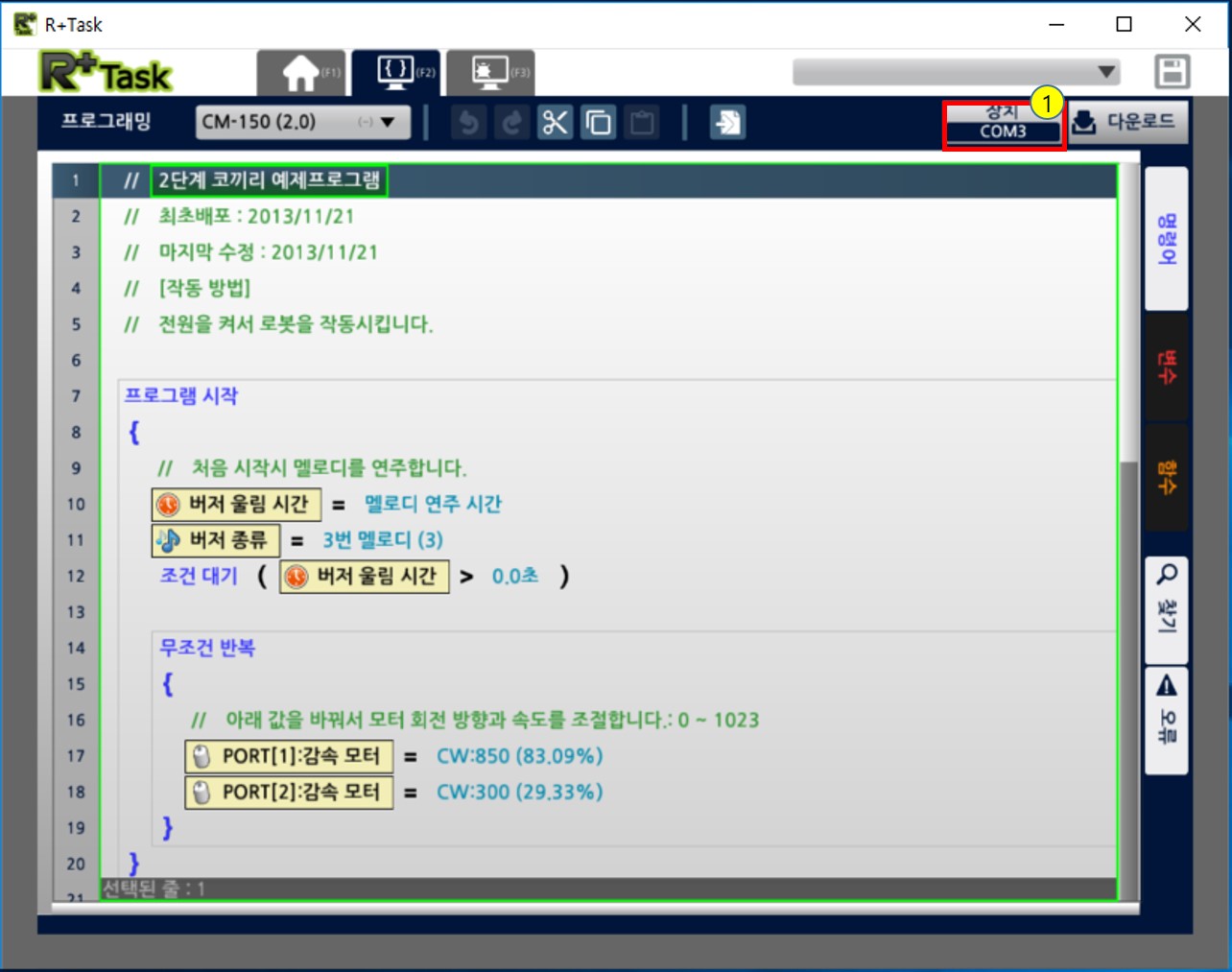
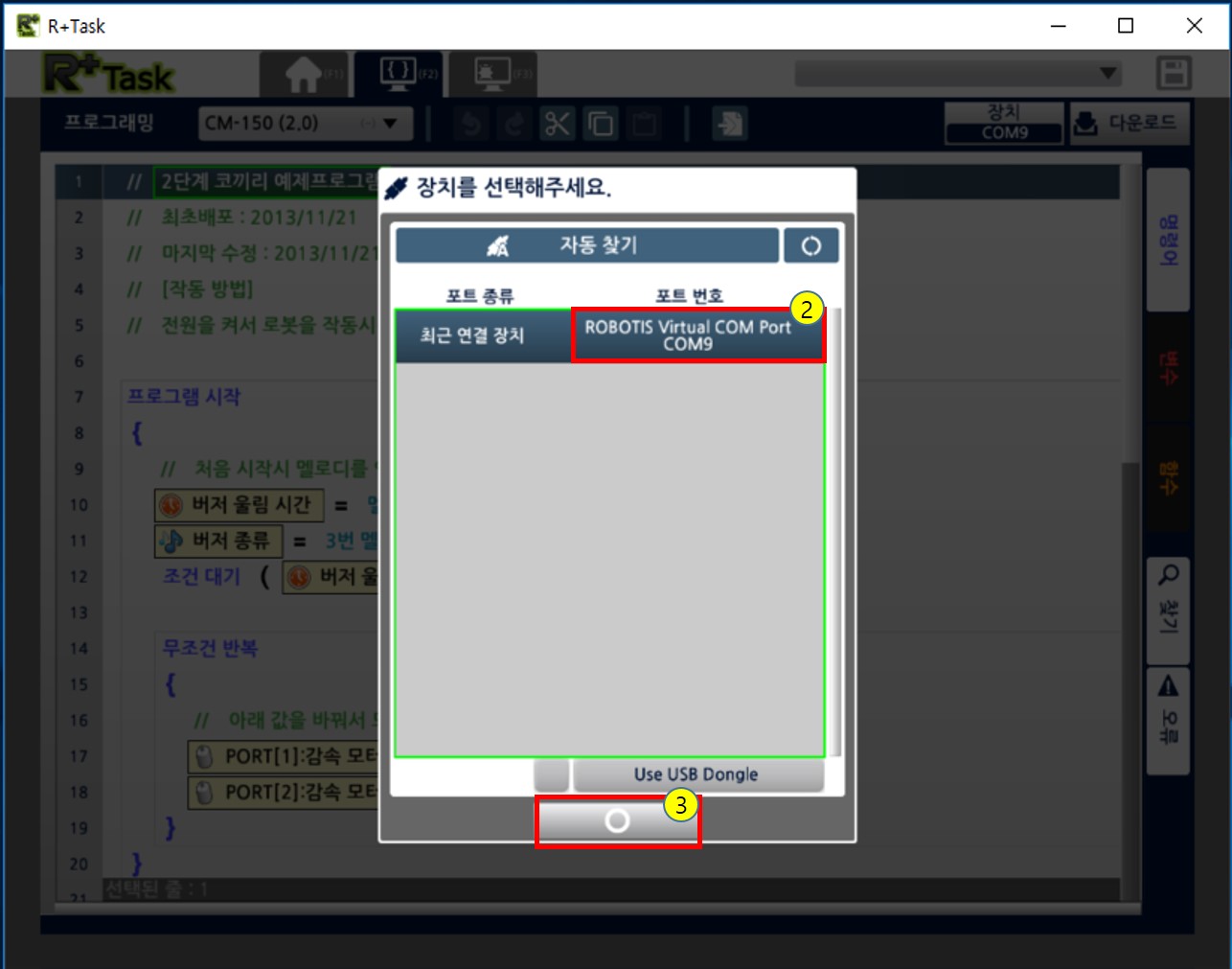
- 목록에서 검색된 장치
2를 선택하고3를 누릅니다.- 목록에서 장치가 나타나지 않을 경우 위의 1, 2 항목을 다시 체크합니다.
-
다운로드
4를 선택합니다.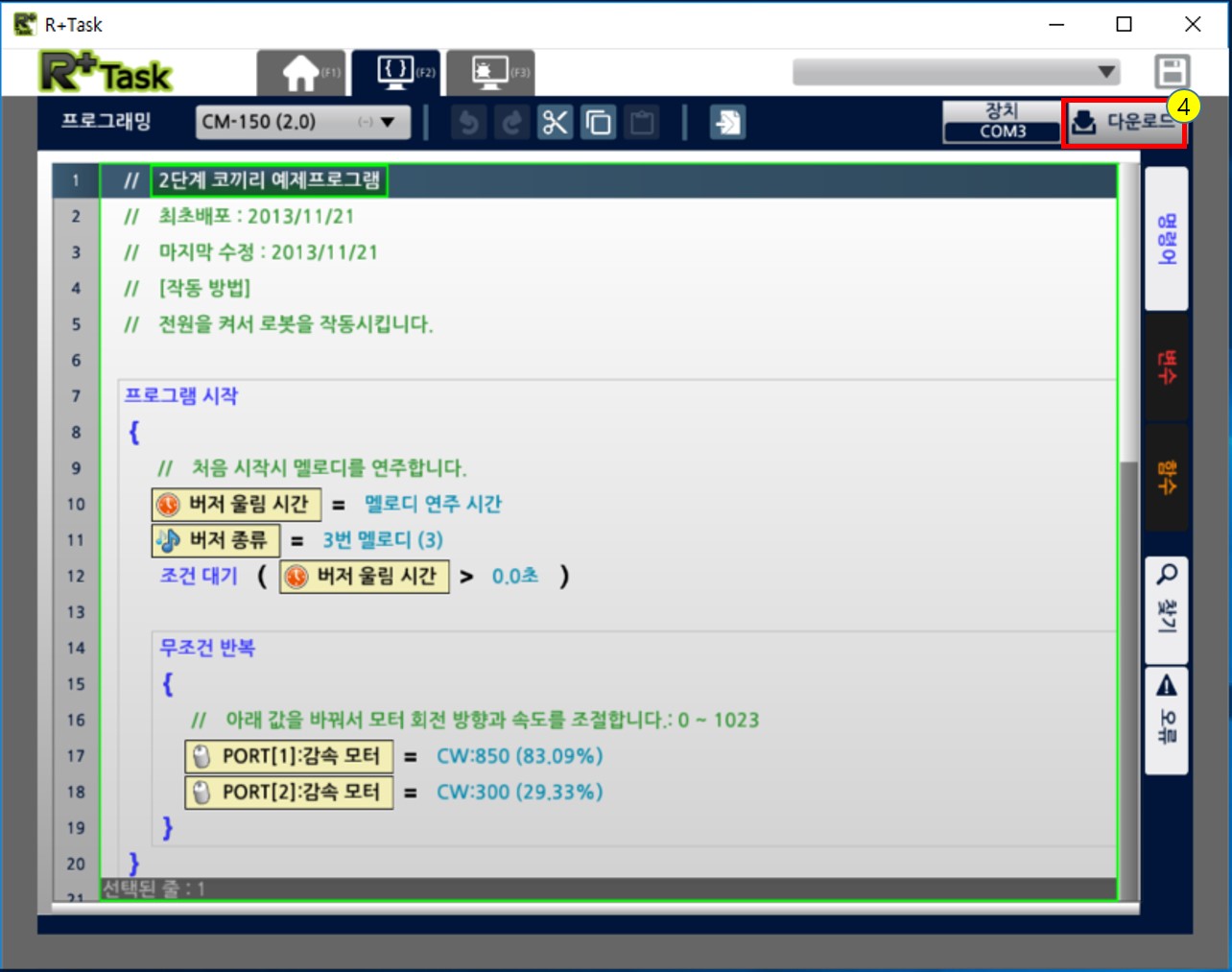
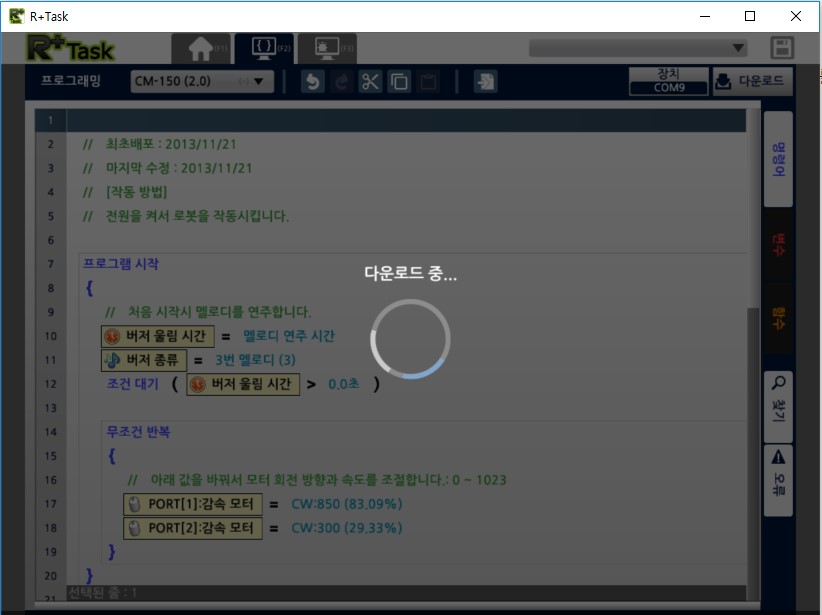
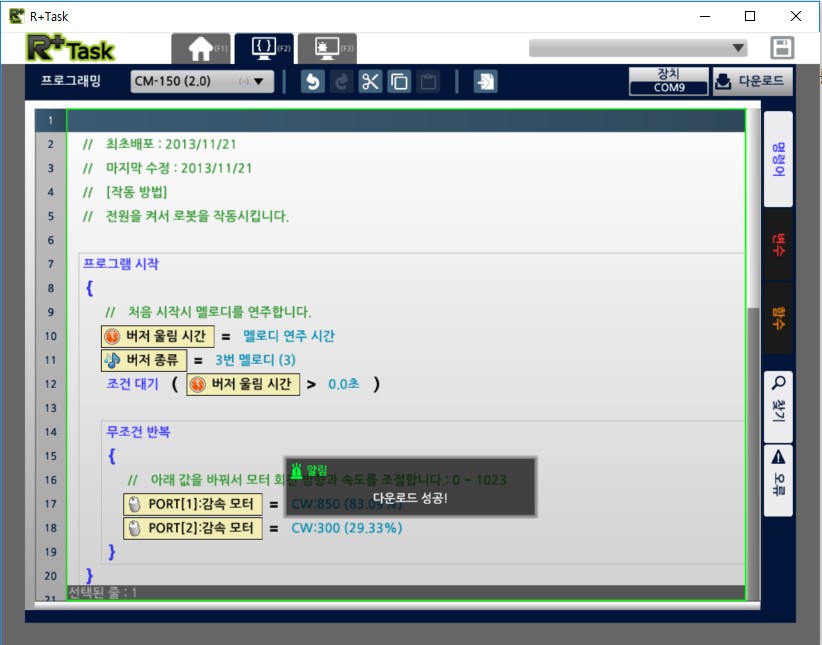
-
아래와 같이 진행된 후 다운로드가 완료됩니다.
CM-530
준비
-
RoboPlus 소프트웨어가 PC에 설치되어 있어야 합니다.
Roboplus 다운로드 -
배터리의 충전상태를 확인합니다.
-
사용할 예제 파일을 PC에 미리 다운로드합니다.
예제 파일 다운로드
다운로드
-
미니 USB 케이블을 이용하여 PC와 제어기(CM-530)을 연결합니다.
-
PC에서 RoboPlus를 실행하고 ‘RoboPlus Task’를 선택합니다.

-
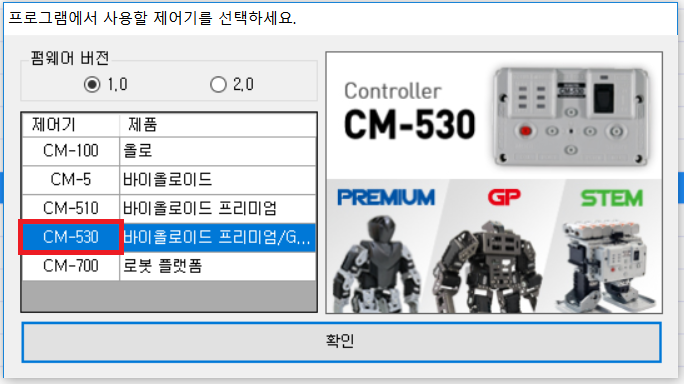
아래 창이 나올 경우 펌웨어 1.0을 체크하고 제어기(CM-530)를 선택합니다.
-
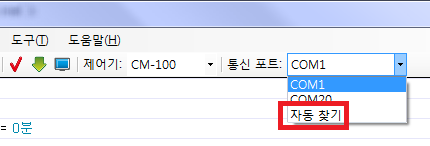
제어기(CM-530)의 전원을 켜고 통신포트를 선택합니다. 자동 찾기를 선택하면 쉽게 포트를 찾을 수 있습니다.
- 제어기(CM-530)를 찾지 못할 경우 아래와 같은 메시지가 나타납니다.
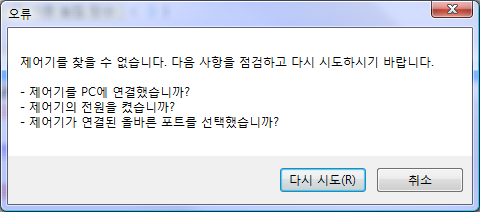
- 위 오류 내용을 확인하여 수정하고 다시 포트를 연결합니다.
-
제어기(CM-530)에 다운로드 할 예제 파일을 RoboPlus에서 불러옵니다.

-
아래 표시된 다운로드 버튼을 눌러 예제 프로그램을 제어기에 다운로드합니다.

-
아래와 같은 메시지가 나타나고 다운로드가 완료됩니다.