Turn the CM-550 controller to (ON) after connecting to the battery or SMPS. After 5 seconds, LED light will blink and the controller will turn on.
Use Micro USB Cable to connect PC and the controller.
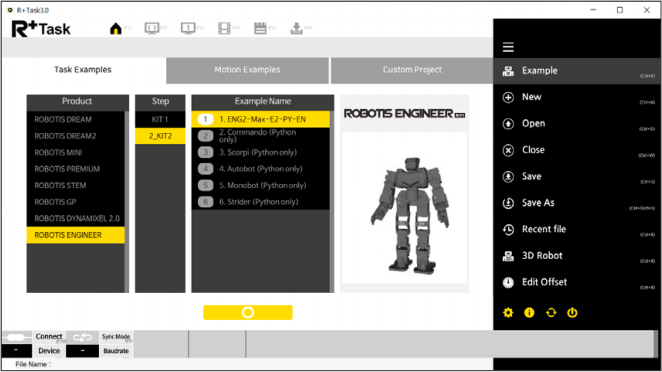
Run the R+ Task 3.0 on the PC, and from ROBOTIS ENGINEER select KIT2 and download the robot configuration program file from the list.
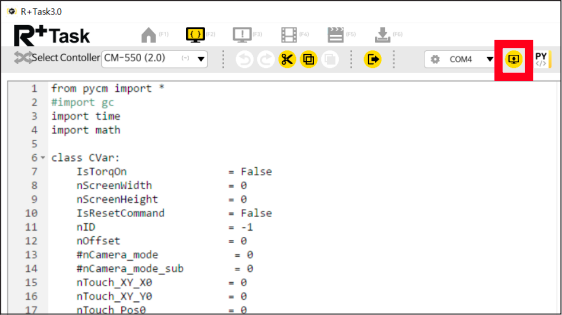
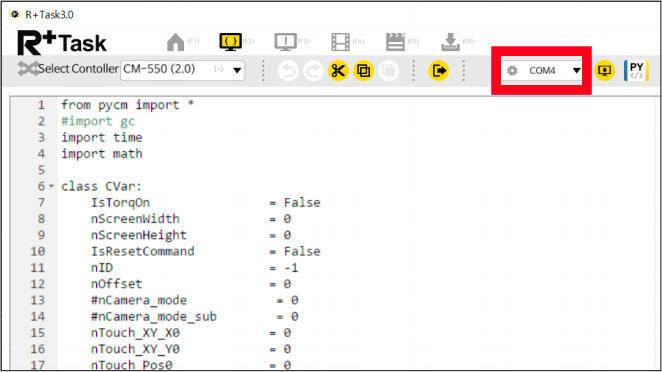
Check the example program code is open in the Python editor, then click Select Device.
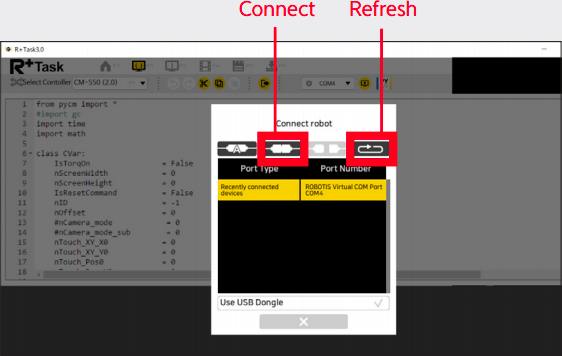
When the Connect Robot window appears, tap Refresh to select the device and tap Connect.
After the device connection is completed, press the Download button displayed to download the robot configuration program to the controller.