-
bool balance_enable
Turn on balance algorithm
-
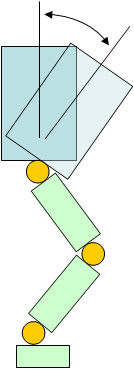
float32 balance_hip_roll_gain
Gain with respect to the gyroscope roll
-
float32 balance_knee_gain
Gain with respect to the gyroscope pitch
-
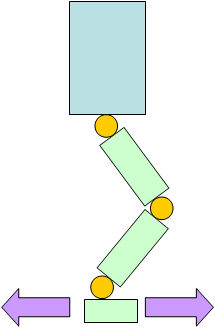
float32 balance_ankle_roll_gain
Gain with respect to the gyroscope roll
-
float32 balance_ankle_pitch_gain
Gain with respect to the gyroscope pitch
-
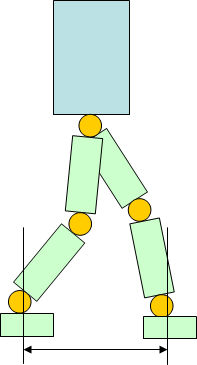
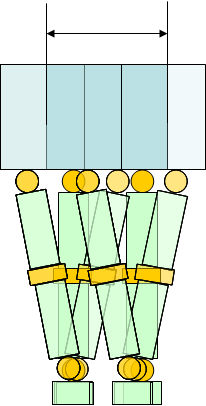
float32 y_swap_amplitude
swing to either left or right during walk [m]
-
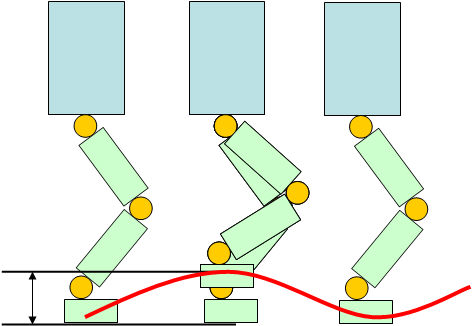
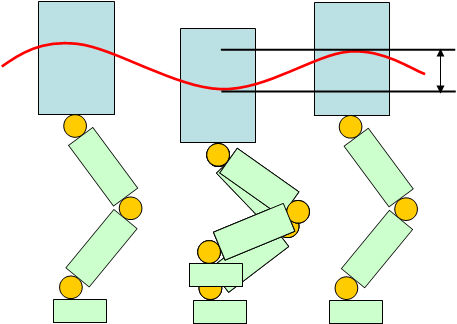
float32 z_swap_amplitude
up and down body swing during walk [m]
-
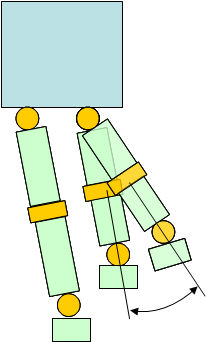
float32 arm_swing_gain
Arm swing gain with respect to Step forward/back. If the left foot moves forward then the right arm swings.
-
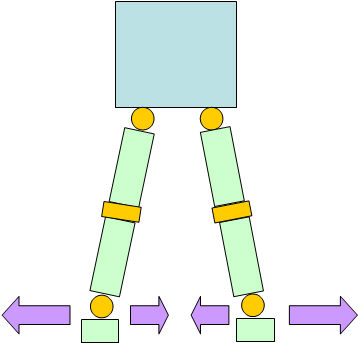
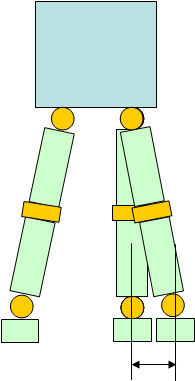
float32 pelvis_offset
roll offset (x-coordinate) at the pelvis level. Values are for Dynamixel position values for hip roll joints [rad]
-
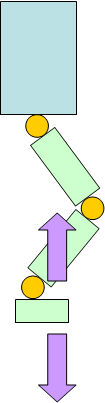
float32 hip_pitch_offset
pitch offset (y-coordinate) at the hip level. Values are for Dynamixel position values for hip pitch joints. [rad]