下载 应用阶段
下载 实战阶段
下载 观看视频
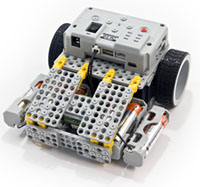
DYNAMIXEL 舵机工作模式AX-12W ID[1, 2]: 车轮模式
算法用控制器按键控制机器人的移动方向.
动作方式先按顺序输入前进(U)、左转(L)、右转(R)、后退(D)指令,按下执行(START)按键则根据输入顺序移动.
下载 应用阶段
下载 实战阶段
下载 观看视频
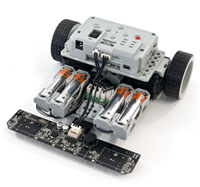
DYNAMIXEL 舵机工作模式AX-12W ID[1, 2]: 车轮模式
算法根据对黑线的红外线检测值确定机器人的移动方向.
动作方式在黑色边界线内部移动,当遇到对方时执行将对方推开的动作.

下载 应用阶段
下载 实战阶段
下载 观看视频
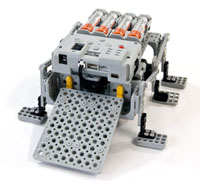
DYNAMIXEL 舵机工作模式AX-12W ID[1, 2]: 车轮模式
算法根据红外线传感器的检测时间判断障碍物,并确定机器人的移动方向.
动作方式当遇到较矮的障碍物时直接趟过去,当遇到较高的障碍物时根据红外线传感器的检测结果调整方向,机器人被翻过来也可以正常行驶.
下载 应用阶段
下载 实战阶段
下载 观看视频
DYNAMIXEL 舵机工作模式AX-12W ID[1, 2]: 车轮模式
算法当遇到交叉的黑线时,按指定方向确定机器人的移动方向.
动作方式根据红外线传感器组检测到的黑线部分,决定机器人前进、左转或右转,并在执行任务的同时按指定路径行驶.

下载 应用阶段
下载 实战阶段
下载 观看视频
算法根据红外线传感器组检测到的位置播放不同音阶.
动作方式可以根据红外线传感器组和控制器按键输出3阶八度音,还能演奏乐曲、录音和反复播放.

下载 应用阶段
下载 实战阶段
下载 观看视频
DYNAMIXEL 舵机工作模式AX-12W ID[1]: 车轮模式, AX-12W ID[2]: 关节模式
算法机器人沿着黑线前进,并在检测到障碍物时执行避开的动作.
动作方式利用两侧的红外线传感器和转向装置沿着黑线移动,当检测到障碍物时避开障碍物并继续行驶.

下载 应用阶段
下载 实战阶段
下载 观看视频
DYNAMIXEL 舵机工作模式AX-12W ID[1, 2]: 车轮模式
算法利用机器人右侧的红外线传感器,与墙壁保持着一定距离在迷宫内移动.
动作方式机器人利用左侧、右侧和前方的红外线传感器决定向左或右移动,并在迷宫中完成各种任务,最终顺利从迷宫中走出来.








