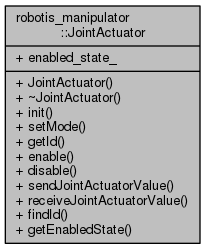
The JointActuator class.
More...
#include <robotis_manipulator_manager.h>
| robotis_manipulator::JointActuator::JointActuator |
( |
| ) |
|
|
inline |
| virtual robotis_manipulator::JointActuator::~JointActuator |
( |
| ) |
|
|
inlinevirtual |
| virtual void robotis_manipulator::JointActuator::disable |
( |
| ) |
|
|
pure virtual |
| virtual void robotis_manipulator::JointActuator::enable |
( |
| ) |
|
|
pure virtual |
| bool JointActuator::findId |
( |
uint8_t |
actuator_id | ) |
|
findId
- Parameters
-
- Returns
Definition at line 30 of file robotis_manipulator_manager.cpp.
32 std::vector<uint8_t>
id =
getId();
33 for(uint32_t index = 0; index <
id.size(); index++)
35 if(
id.at(index) == actuator_id)
virtual std::vector< uint8_t > getId()=0
getId
| bool JointActuator::getEnabledState |
( |
| ) |
|
| virtual std::vector<uint8_t> robotis_manipulator::JointActuator::getId |
( |
| ) |
|
|
pure virtual |
| virtual void robotis_manipulator::JointActuator::init |
( |
std::vector< uint8_t > |
actuator_id, |
|
|
const void * |
arg |
|
) |
| |
|
pure virtual |
| virtual std::vector<ActuatorValue> robotis_manipulator::JointActuator::receiveJointActuatorValue |
( |
std::vector< uint8_t > |
actuator_id | ) |
|
|
pure virtual |
receiveJointActuatorValue
- Parameters
-
- Returns
| virtual bool robotis_manipulator::JointActuator::sendJointActuatorValue |
( |
std::vector< uint8_t > |
actuator_id, |
|
|
std::vector< ActuatorValue > |
value_vector |
|
) |
| |
|
pure virtual |
sendJointActuatorValue
- Parameters
-
- Returns
| virtual void robotis_manipulator::JointActuator::setMode |
( |
std::vector< uint8_t > |
actuator_id, |
|
|
const void * |
arg |
|
) |
| |
|
pure virtual |
| bool robotis_manipulator::JointActuator::enabled_state_ |
The documentation for this class was generated from the following files:

 1.8.11
1.8.11 
