|
Robotis Manipulator
1.0.0
|
|
Robotis Manipulator
1.0.0
|
#include <robotis_manipulator_common.h>
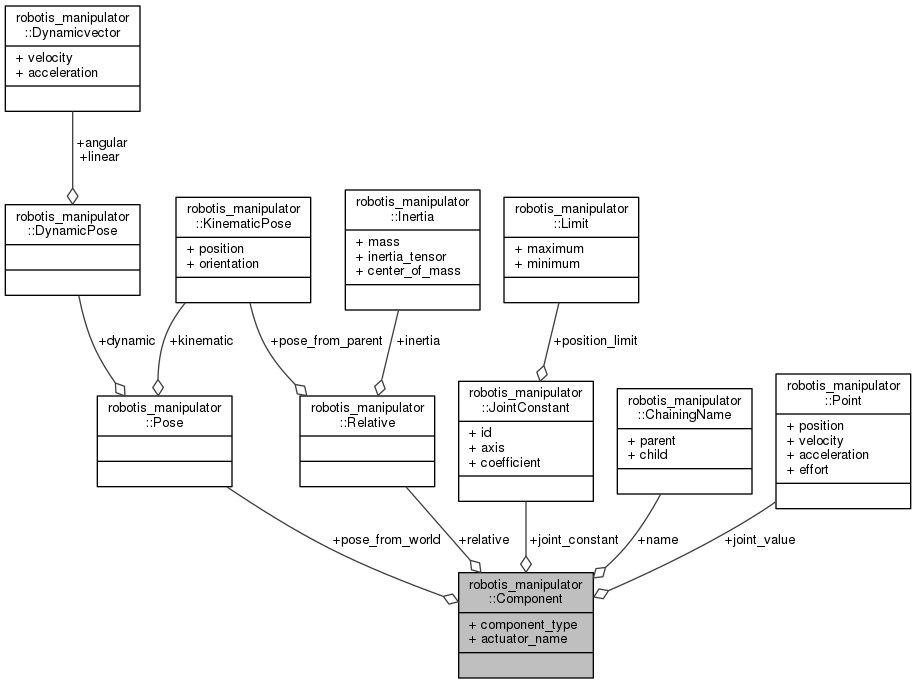
Public Attributes | |
| ChainingName | name |
| ComponentType | component_type |
| Relative | relative |
| JointConstant | joint_constant |
| Pose | pose_from_world |
| JointValue | joint_value |
| Name | actuator_name |
Definition at line 160 of file robotis_manipulator_common.h.
| Name robotis_manipulator::Component::actuator_name |
Definition at line 173 of file robotis_manipulator_common.h.
| ComponentType robotis_manipulator::Component::component_type |
Definition at line 164 of file robotis_manipulator_common.h.
| JointConstant robotis_manipulator::Component::joint_constant |
Definition at line 166 of file robotis_manipulator_common.h.
| JointValue robotis_manipulator::Component::joint_value |
Definition at line 170 of file robotis_manipulator_common.h.
| ChainingName robotis_manipulator::Component::name |
Definition at line 163 of file robotis_manipulator_common.h.
| Pose robotis_manipulator::Component::pose_from_world |
Definition at line 169 of file robotis_manipulator_common.h.
| Relative robotis_manipulator::Component::relative |
Definition at line 165 of file robotis_manipulator_common.h.
 1.8.11
1.8.11 
