211 std::vector<Point> result_point;
214 Point single_task_way_point;
234 single_task_way_point.
effort = 0.0;
236 result_point.push_back(single_task_way_point);
241 for(uint8_t i = 0; i < 3; i++)
250 Eigen::Vector3d rpy_orientation;
251 rpy_orientation << result_point.at(3).position, result_point.at(4).position, result_point.at(5).position;
253 result_point.at(4).position,
254 result_point.at(5).position);
256 Eigen::Vector3d rpy_velocity;
257 rpy_velocity << result_point.at(3).velocity, result_point.at(4).velocity, result_point.at(5).velocity;
260 Eigen::Vector3d rpy_acceleration;
261 rpy_acceleration << result_point.at(3).acceleration, result_point.at(4).acceleration, result_point.at(5).acceleration;
264 return task_way_point;
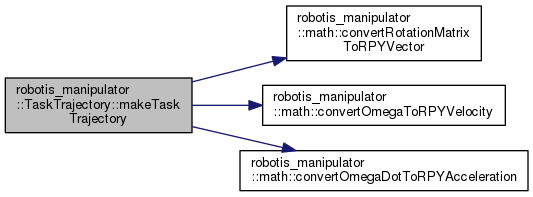
Eigen::Vector3d convertRPYVelocityToOmega(Eigen::Vector3d rpy_vector, Eigen::Vector3d rpy_velocity)
convertRPYVelocityToOmega
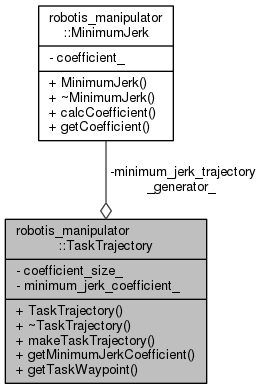
Eigen::MatrixXd minimum_jerk_coefficient_
Eigen::Vector3d convertRPYAccelerationToOmegaDot(Eigen::Vector3d rpy_vector, Eigen::Vector3d rpy_velocity, Eigen::Vector3d rpy_acceleration)
convertRPYAccelerationToOmegaDot
uint8_t coefficient_size_
Eigen::Vector3d acceleration
Eigen::Matrix3d orientation
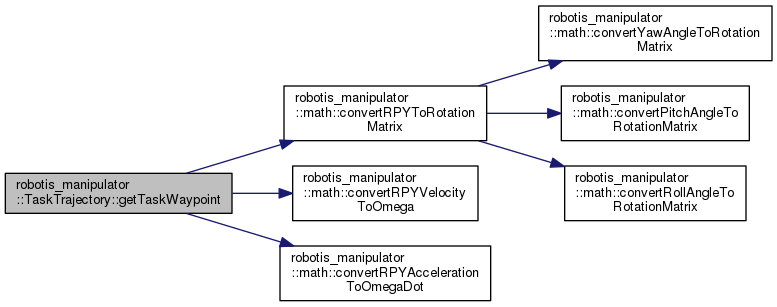
Eigen::Matrix3d convertRPYToRotationMatrix(double roll, double pitch, double yaw)
convertRPYToRotationMatrix
 1.8.11
1.8.11 
