|
Robotis Manipulator
1.0.0
|
|
Robotis Manipulator
1.0.0
|
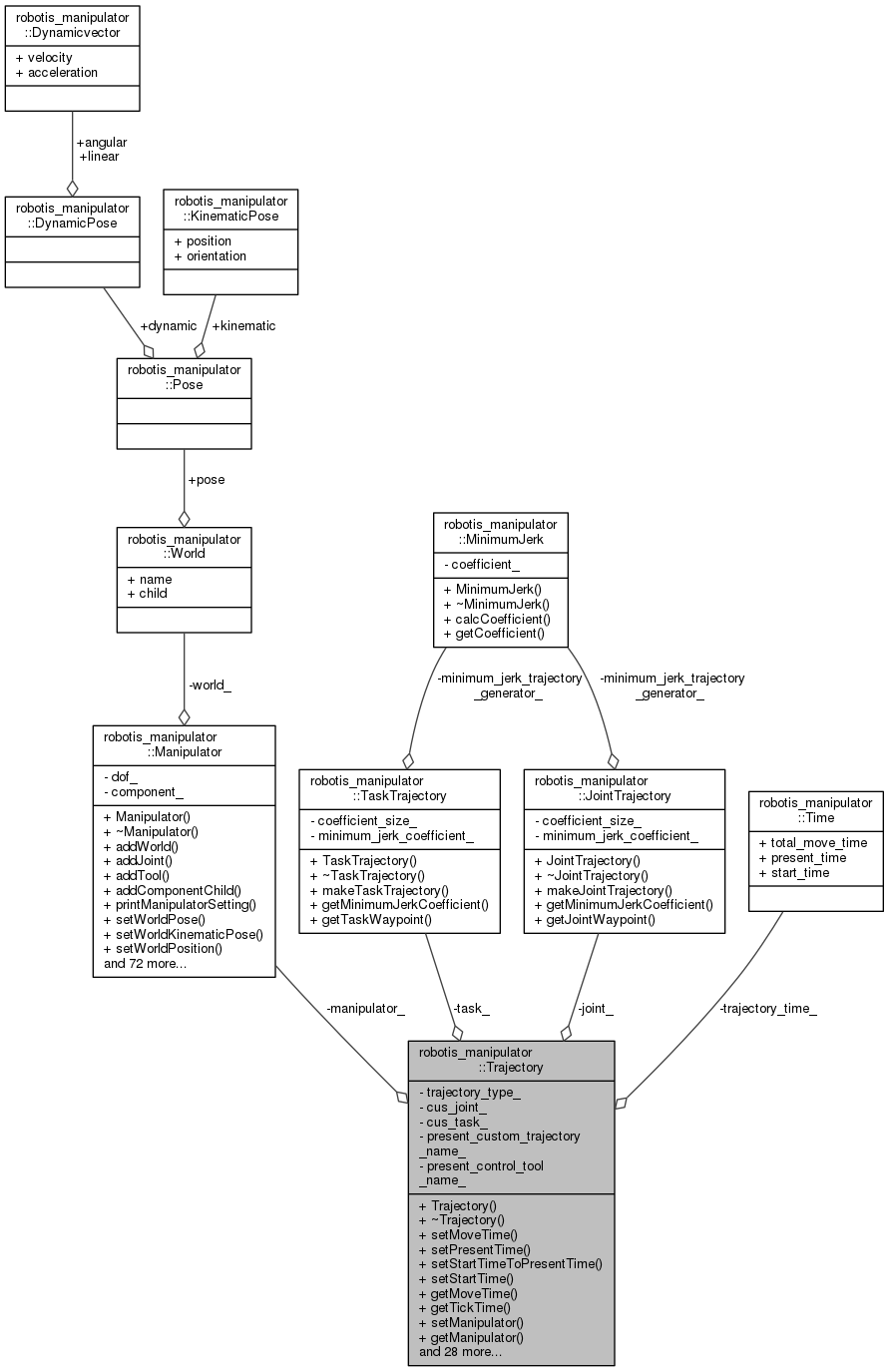
The Trajectory class. More...
#include <robotis_manipulator_trajectory_generator.h>
Public Member Functions | |
| Trajectory () | |
| ~Trajectory () | |
| void | setMoveTime (double move_time) |
| setMoveTime More... | |
| void | setPresentTime (double present_time) |
| setPresentTime More... | |
| void | setStartTimeToPresentTime () |
| setStartTimeToPresentTime More... | |
| void | setStartTime (double start_time) |
| setStartTime More... | |
| double | getMoveTime () |
| getMoveTime More... | |
| double | getTickTime () |
| getTickTime More... | |
| void | setManipulator (Manipulator manipulator) |
| setManipulator More... | |
| Manipulator * | getManipulator () |
| getManipulator More... | |
| JointTrajectory | getJointTrajectory () |
| getJointTrajectory More... | |
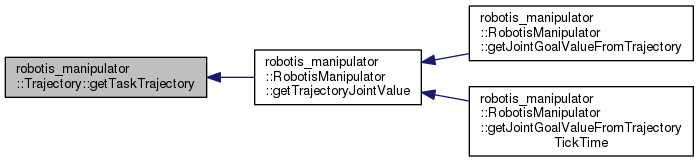
| TaskTrajectory | getTaskTrajectory () |
| getTaskTrajectory More... | |
| CustomJointTrajectory * | getCustomJointTrajectory (Name name) |
| getCustomJointTrajectory More... | |
| CustomTaskTrajectory * | getCustomTaskTrajectory (Name name) |
| getCustomTaskTrajectory More... | |
| void | addCustomTrajectory (Name trajectory_name, CustomJointTrajectory *custom_trajectory) |
| addCustomTrajectory More... | |
| void | addCustomTrajectory (Name trajectory_name, CustomTaskTrajectory *custom_trajectory) |
| addCustomTrajectory More... | |
| void | setCustomTrajectoryOption (Name trajectory_name, const void *arg) |
| setCustomTrajectoryOption More... | |
| void | setPresentControlToolName (Name present_control_tool_name) |
| setPresentControlToolName More... | |
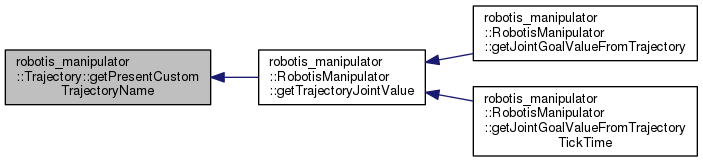
| Name | getPresentCustomTrajectoryName () |
| getPresentCustomTrajectoryName More... | |
| Name | getPresentControlToolName () |
| getPresentControlToolName More... | |
| void | initTrajectoryWaypoint (Manipulator actual_manipulator, Kinematics *kinematics) |
| initTrajectoryWaypoint More... | |
| void | updatePresentWaypoint (Kinematics *kinematics) |
| updatePresentWaypoint More... | |
| void | setPresentJointWaypoint (JointWaypoint joint_value_vector) |
| setPresentJointWaypoint More... | |
| void | setPresentTaskWaypoint (Name tool_name, TaskWaypoint tool_position_value_vector) |
| setPresentTaskWaypoint More... | |
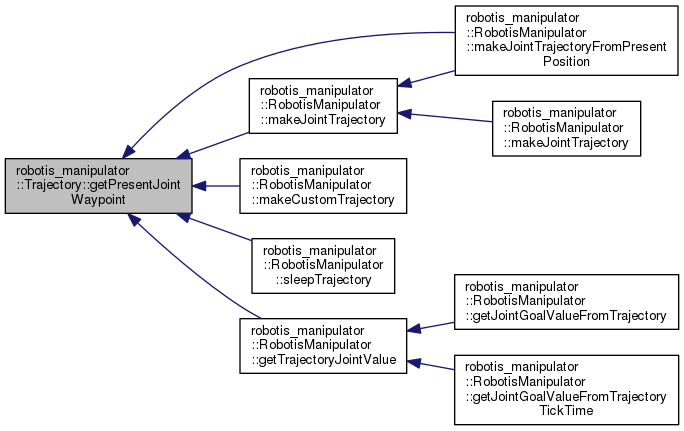
| JointWaypoint | getPresentJointWaypoint () |
| getPresentJointWaypoint More... | |
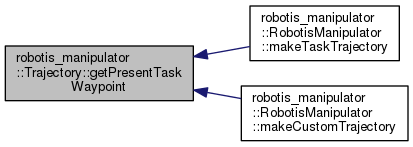
| TaskWaypoint | getPresentTaskWaypoint (Name tool_name) |
| getPresentTaskWaypoint More... | |
| JointWaypoint | removeWaypointDynamicData (JointWaypoint value) |
| removeWaypointDynamicData More... | |
| TaskWaypoint | removeWaypointDynamicData (TaskWaypoint value) |
| removeWaypointDynamicData More... | |
| void | setTrajectoryType (TrajectoryType trajectory_type) |
| setTrajectoryType More... | |
| bool | checkTrajectoryType (TrajectoryType trajectory_type) |
| checkTrajectoryType More... | |
| void | makeJointTrajectory (JointWaypoint start_way_point, JointWaypoint goal_way_point) |
| makeJointTrajectory More... | |
| void | makeTaskTrajectory (TaskWaypoint start_way_point, TaskWaypoint goal_way_point) |
| makeTaskTrajectory More... | |
| void | makeCustomTrajectory (Name trajectory_name, JointWaypoint start_way_point, const void *arg) |
| makeCustomTrajectory More... | |
| void | makeCustomTrajectory (Name trajectory_name, TaskWaypoint start_way_point, const void *arg) |
| makeCustomTrajectory More... | |
| void | setToolGoalPosition (Name tool_name, double tool_goal_position) |
| setToolGoalPosition More... | |
| void | setToolGoalValue (Name tool_name, JointValue tool_goal_value) |
| setToolGoalValue More... | |
| double | getToolGoalPosition (Name tool_name) |
| getToolGoalPosition More... | |
| JointValue | getToolGoalValue (Name tool_name) |
| getToolGoalValue More... | |
Private Attributes | |
| TrajectoryType | trajectory_type_ |
| Time | trajectory_time_ |
| Manipulator | manipulator_ |
| JointTrajectory | joint_ |
| TaskTrajectory | task_ |
| std::map< Name, CustomJointTrajectory * > | cus_joint_ |
| std::map< Name, CustomTaskTrajectory * > | cus_task_ |
| Name | present_custom_trajectory_name_ |
| Name | present_control_tool_name_ |
The Trajectory class.
Definition at line 158 of file robotis_manipulator_trajectory_generator.h.
|
inline |
Definition at line 174 of file robotis_manipulator_trajectory_generator.h.
|
inline |
Definition at line 175 of file robotis_manipulator_trajectory_generator.h.
| void Trajectory::addCustomTrajectory | ( | Name | trajectory_name, |
| CustomJointTrajectory * | custom_trajectory | ||
| ) |
addCustomTrajectory
| trajectory_name | |
| custom_trajectory |
Definition at line 336 of file robotis_manipulator_trajectory_generator.cpp.

| void Trajectory::addCustomTrajectory | ( | Name | trajectory_name, |
| CustomTaskTrajectory * | custom_trajectory | ||
| ) |
addCustomTrajectory
| trajectory_name | |
| custom_trajectory |
Definition at line 341 of file robotis_manipulator_trajectory_generator.cpp.
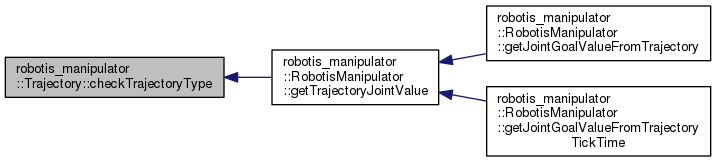
| bool Trajectory::checkTrajectoryType | ( | TrajectoryType | trajectory_type | ) |
checkTrajectoryType
| trajectory_type |
Definition at line 432 of file robotis_manipulator_trajectory_generator.cpp.
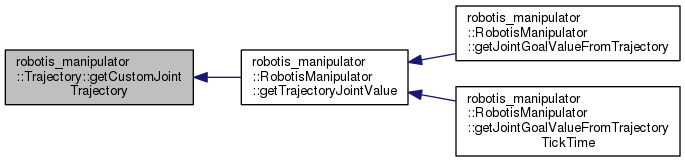
| CustomJointTrajectory * Trajectory::getCustomJointTrajectory | ( | Name | name | ) |
getCustomJointTrajectory
| name |
Definition at line 326 of file robotis_manipulator_trajectory_generator.cpp.
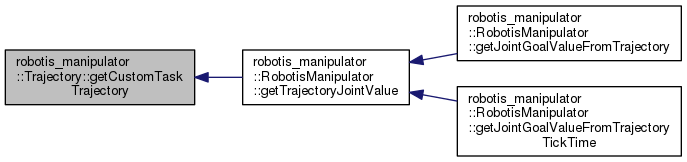
| CustomTaskTrajectory * Trajectory::getCustomTaskTrajectory | ( | Name | name | ) |
getCustomTaskTrajectory
| name |
Definition at line 331 of file robotis_manipulator_trajectory_generator.cpp.
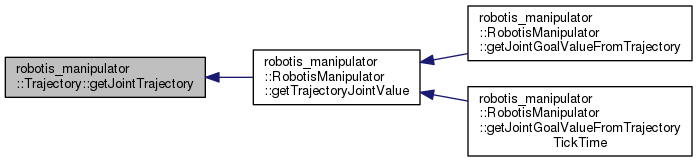
| JointTrajectory Trajectory::getJointTrajectory | ( | ) |
getJointTrajectory
Definition at line 316 of file robotis_manipulator_trajectory_generator.cpp.
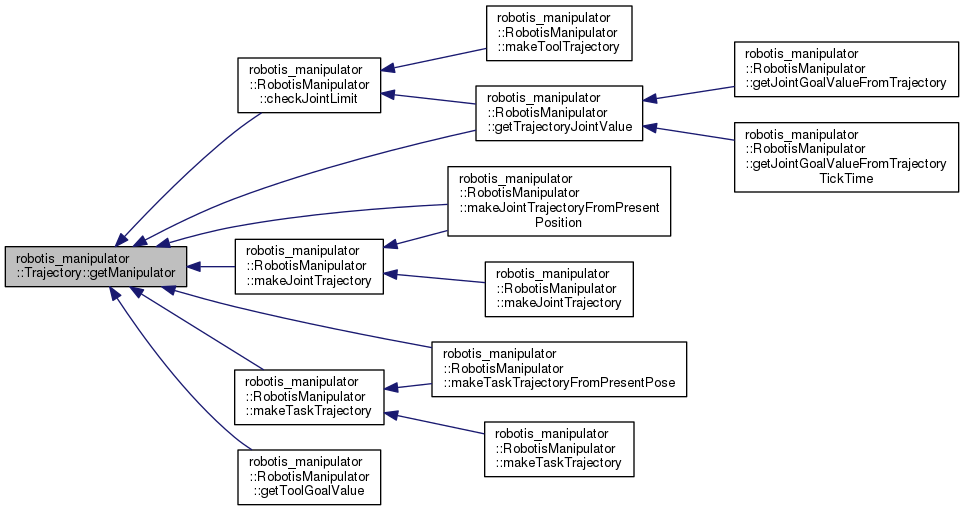
| Manipulator * Trajectory::getManipulator | ( | ) |
getManipulator
Definition at line 311 of file robotis_manipulator_trajectory_generator.cpp.
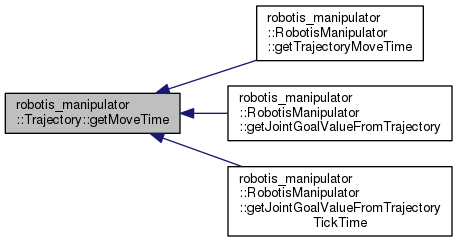
| double Trajectory::getMoveTime | ( | ) |
getMoveTime
Definition at line 296 of file robotis_manipulator_trajectory_generator.cpp.
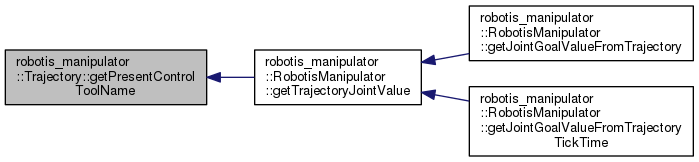
| Name Trajectory::getPresentControlToolName | ( | ) |
getPresentControlToolName
Definition at line 364 of file robotis_manipulator_trajectory_generator.cpp.
| Name Trajectory::getPresentCustomTrajectoryName | ( | ) |
getPresentCustomTrajectoryName
Definition at line 359 of file robotis_manipulator_trajectory_generator.cpp.
| JointWaypoint Trajectory::getPresentJointWaypoint | ( | ) |
getPresentJointWaypoint
Definition at line 395 of file robotis_manipulator_trajectory_generator.cpp.
| TaskWaypoint Trajectory::getPresentTaskWaypoint | ( | Name | tool_name | ) |
getPresentTaskWaypoint
| tool_name |
Definition at line 400 of file robotis_manipulator_trajectory_generator.cpp.
| TaskTrajectory Trajectory::getTaskTrajectory | ( | ) |
getTaskTrajectory
Definition at line 321 of file robotis_manipulator_trajectory_generator.cpp.
| double Trajectory::getTickTime | ( | ) |
getTickTime
Definition at line 301 of file robotis_manipulator_trajectory_generator.cpp.

| double Trajectory::getToolGoalPosition | ( | Name | tool_name | ) |
getToolGoalPosition
| tool_name |
Definition at line 484 of file robotis_manipulator_trajectory_generator.cpp.
| JointValue Trajectory::getToolGoalValue | ( | Name | tool_name | ) |
getToolGoalValue
| tool_name |
Definition at line 489 of file robotis_manipulator_trajectory_generator.cpp.

| void Trajectory::initTrajectoryWaypoint | ( | Manipulator | actual_manipulator, |
| Kinematics * | kinematics | ||
| ) |
initTrajectoryWaypoint
| actual_manipulator | |
| kinematics |
Definition at line 369 of file robotis_manipulator_trajectory_generator.cpp.
| void Trajectory::makeCustomTrajectory | ( | Name | trajectory_name, |
| JointWaypoint | start_way_point, | ||
| const void * | arg | ||
| ) |
makeCustomTrajectory
| trajectory_name | |
| start_way_point | |
| arg |
Definition at line 450 of file robotis_manipulator_trajectory_generator.cpp.


| void Trajectory::makeCustomTrajectory | ( | Name | trajectory_name, |
| TaskWaypoint | start_way_point, | ||
| const void * | arg | ||
| ) |
makeCustomTrajectory
| trajectory_name | |
| start_way_point | |
| arg |
Definition at line 461 of file robotis_manipulator_trajectory_generator.cpp.

| void Trajectory::makeJointTrajectory | ( | JointWaypoint | start_way_point, |
| JointWaypoint | goal_way_point | ||
| ) |
makeJointTrajectory
| start_way_point | |
| goal_way_point |
Definition at line 440 of file robotis_manipulator_trajectory_generator.cpp.
| void Trajectory::makeTaskTrajectory | ( | TaskWaypoint | start_way_point, |
| TaskWaypoint | goal_way_point | ||
| ) |
makeTaskTrajectory
| start_way_point | |
| goal_way_point |
Definition at line 445 of file robotis_manipulator_trajectory_generator.cpp.

| JointWaypoint Trajectory::removeWaypointDynamicData | ( | JointWaypoint | value | ) |
removeWaypointDynamicData
| value |
Definition at line 405 of file robotis_manipulator_trajectory_generator.cpp.
| TaskWaypoint Trajectory::removeWaypointDynamicData | ( | TaskWaypoint | value | ) |
removeWaypointDynamicData
| value |
Definition at line 416 of file robotis_manipulator_trajectory_generator.cpp.
| void Trajectory::setCustomTrajectoryOption | ( | Name | trajectory_name, |
| const void * | arg | ||
| ) |
setCustomTrajectoryOption
| trajectory_name | |
| arg |
Definition at line 346 of file robotis_manipulator_trajectory_generator.cpp.

| void Trajectory::setManipulator | ( | Manipulator | manipulator | ) |
setManipulator
| manipulator |
Definition at line 306 of file robotis_manipulator_trajectory_generator.cpp.
| void Trajectory::setMoveTime | ( | double | move_time | ) |
setMoveTime
| move_time |
Definition at line 276 of file robotis_manipulator_trajectory_generator.cpp.
| void Trajectory::setPresentControlToolName | ( | Name | present_control_tool_name | ) |
setPresentControlToolName
| present_control_tool_name |
Definition at line 354 of file robotis_manipulator_trajectory_generator.cpp.
| void Trajectory::setPresentJointWaypoint | ( | JointWaypoint | joint_value_vector | ) |
setPresentJointWaypoint
| joint_value_vector |
Definition at line 385 of file robotis_manipulator_trajectory_generator.cpp.
| void Trajectory::setPresentTaskWaypoint | ( | Name | tool_name, |
| TaskWaypoint | tool_position_value_vector | ||
| ) |
setPresentTaskWaypoint
| tool_name | |
| tool_position_value_vector |
Definition at line 390 of file robotis_manipulator_trajectory_generator.cpp.
| void Trajectory::setPresentTime | ( | double | present_time | ) |
setPresentTime
| present_time |
Definition at line 281 of file robotis_manipulator_trajectory_generator.cpp.

| void Trajectory::setStartTime | ( | double | start_time | ) |
setStartTime
| start_time |
Definition at line 291 of file robotis_manipulator_trajectory_generator.cpp.
| void Trajectory::setStartTimeToPresentTime | ( | ) |
setStartTimeToPresentTime
Definition at line 286 of file robotis_manipulator_trajectory_generator.cpp.
| void Trajectory::setToolGoalPosition | ( | Name | tool_name, |
| double | tool_goal_position | ||
| ) |
setToolGoalPosition
| tool_name | |
| tool_goal_position |
Definition at line 473 of file robotis_manipulator_trajectory_generator.cpp.
| void Trajectory::setToolGoalValue | ( | Name | tool_name, |
| JointValue | tool_goal_value | ||
| ) |
setToolGoalValue
| tool_name | |
| tool_goal_value |
Definition at line 479 of file robotis_manipulator_trajectory_generator.cpp.

| void Trajectory::setTrajectoryType | ( | TrajectoryType | trajectory_type | ) |
setTrajectoryType
| trajectory_type |
Definition at line 427 of file robotis_manipulator_trajectory_generator.cpp.
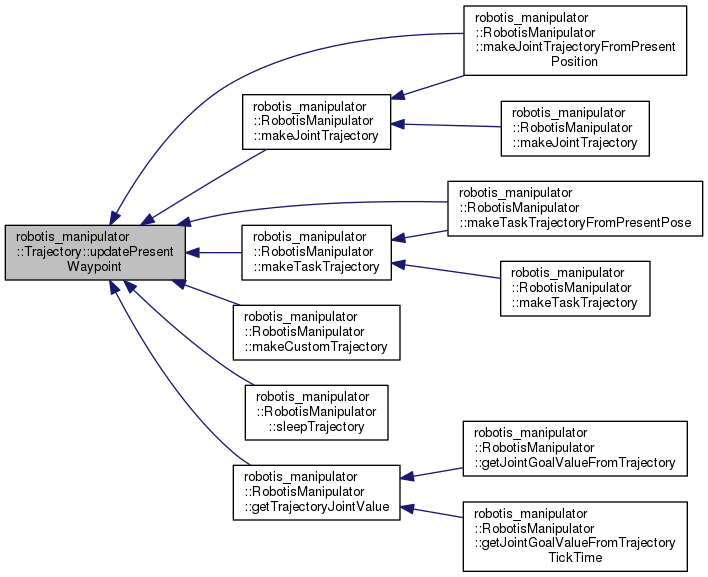
| void Trajectory::updatePresentWaypoint | ( | Kinematics * | kinematics | ) |
updatePresentWaypoint
| kinematics |
Definition at line 379 of file robotis_manipulator_trajectory_generator.cpp.

|
private |
Definition at line 167 of file robotis_manipulator_trajectory_generator.h.
|
private |
Definition at line 168 of file robotis_manipulator_trajectory_generator.h.
|
private |
Definition at line 165 of file robotis_manipulator_trajectory_generator.h.
|
private |
Definition at line 163 of file robotis_manipulator_trajectory_generator.h.
|
private |
Definition at line 171 of file robotis_manipulator_trajectory_generator.h.
|
private |
Definition at line 170 of file robotis_manipulator_trajectory_generator.h.
|
private |
Definition at line 166 of file robotis_manipulator_trajectory_generator.h.
|
private |
Definition at line 162 of file robotis_manipulator_trajectory_generator.h.
|
private |
Definition at line 161 of file robotis_manipulator_trajectory_generator.h.
 1.8.11
1.8.11 
