|
Robotis Manipulator
1.0.0
|
|
Robotis Manipulator
1.0.0
|
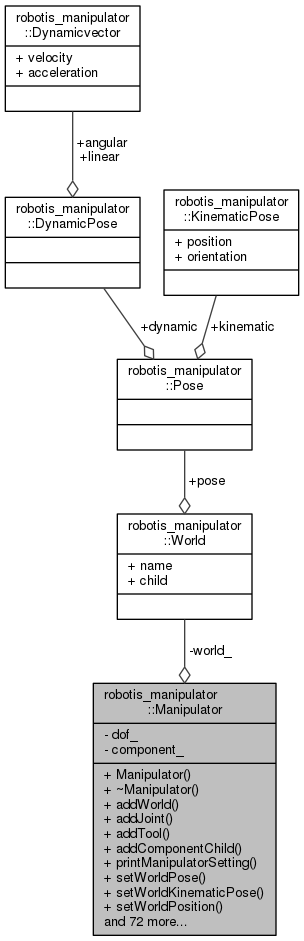
The Manipulator class. More...
#include <robotis_manipulator_common.h>
Public Member Functions | |
| Manipulator () | |
| ~Manipulator () | |
| void | addWorld (Name world_name, Name child_name, Eigen::Vector3d world_position=Eigen::Vector3d::Zero(), Eigen::Matrix3d world_orientation=Eigen::Matrix3d::Identity()) |
| addWorld More... | |
| void | addJoint (Name my_name, Name parent_name, Name child_name, Eigen::Vector3d relative_position, Eigen::Matrix3d relative_orientation, Eigen::Vector3d axis_of_rotation=Eigen::Vector3d::Zero(), int8_t joint_actuator_id=-1, double max_position_limit=M_PI, double min_position_limit=-M_PI, double coefficient=1.0, double mass=0.0, Eigen::Matrix3d inertia_tensor=Eigen::Matrix3d::Identity(), Eigen::Vector3d center_of_mass=Eigen::Vector3d::Zero()) |
| addJoint More... | |
| void | addTool (Name my_name, Name parent_name, Eigen::Vector3d relative_position, Eigen::Matrix3d relative_orientation, int8_t tool_id=-1, double max_position_limit=M_PI, double min_position_limit=-M_PI, double coefficient=1.0, double mass=0.0, Eigen::Matrix3d inertia_tensor=Eigen::Matrix3d::Identity(), Eigen::Vector3d center_of_mass=Eigen::Vector3d::Zero()) |
| addTool More... | |
| void | addComponentChild (Name my_name, Name child_name) |
| addComponentChild More... | |
| void | printManipulatorSetting () |
| printManipulatorSetting More... | |
| void | setWorldPose (Pose world_pose) |
| setWorldPose More... | |
| void | setWorldKinematicPose (KinematicPose world_kinematic_pose) |
| setWorldKinematicPose More... | |
| void | setWorldPosition (Eigen::Vector3d world_position) |
| setWorldPosition More... | |
| void | setWorldOrientation (Eigen::Matrix3d world_orientation) |
| setWorldOrientation More... | |
| void | setWorldDynamicPose (DynamicPose world_dynamic_pose) |
| setWorldDynamicPose More... | |
| void | setWorldLinearVelocity (Eigen::Vector3d world_linear_velocity) |
| setWorldLinearVelocity More... | |
| void | setWorldAngularVelocity (Eigen::Vector3d world_angular_velocity) |
| setWorldAngularVelocity More... | |
| void | setWorldLinearAcceleration (Eigen::Vector3d world_linear_acceleration) |
| setWorldLinearAcceleration More... | |
| void | setWorldAngularAcceleration (Eigen::Vector3d world_angular_acceleration) |
| setWorldAngularAcceleration More... | |
| void | setComponent (Name component_name, Component component) |
| setComponent More... | |
| void | setComponentActuatorName (Name component_name, Name actuator_name) |
| setComponentActuatorName More... | |
| void | setComponentPoseFromWorld (Name component_name, Pose pose_to_world) |
| setComponentPoseFromWorld More... | |
| void | setComponentKinematicPoseFromWorld (Name component_name, KinematicPose pose_to_world) |
| setComponentKinematicPoseFromWorld More... | |
| void | setComponentPositionFromWorld (Name component_name, Eigen::Vector3d position_to_world) |
| setComponentPositionFromWorld More... | |
| void | setComponentOrientationFromWorld (Name component_name, Eigen::Matrix3d orientation_to_wolrd) |
| setComponentOrientationFromWorld More... | |
| void | setComponentDynamicPoseFromWorld (Name component_name, DynamicPose dynamic_pose) |
| setComponentDynamicPoseFromWorld More... | |
| void | setJointPosition (Name name, double position) |
| setJointPosition More... | |
| void | setJointVelocity (Name name, double velocity) |
| setJointVelocity More... | |
| void | setJointAcceleration (Name name, double acceleration) |
| setJointAcceleration More... | |
| void | setJointEffort (Name name, double effort) |
| setJointEffort More... | |
| void | setJointValue (Name name, JointValue joint_value) |
| setJointValue More... | |
| void | setAllActiveJointPosition (std::vector< double > joint_position_vector) |
| setAllActiveJointPosition More... | |
| void | setAllActiveJointValue (std::vector< JointValue > joint_value_vector) |
| setAllActiveJointValue More... | |
| void | setAllJointPosition (std::vector< double > joint_position_vector) |
| setAllJointPosition More... | |
| void | setAllJointValue (std::vector< JointValue > joint_value_vector) |
| setAllJointValue More... | |
| void | setAllToolPosition (std::vector< double > tool_position_vector) |
| setAllToolPosition More... | |
| void | setAllToolValue (std::vector< JointValue > tool_value_vector) |
| setAllToolValue More... | |
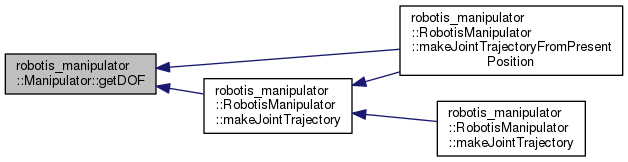
| int8_t | getDOF () |
| getDOF More... | |
| Name | getWorldName () |
| getWorldName More... | |
| Name | getWorldChildName () |
| getWorldChildName More... | |
| Pose | getWorldPose () |
| getWorldPose More... | |
| KinematicPose | getWorldKinematicPose () |
| getWorldKinematicPose More... | |
| Eigen::Vector3d | getWorldPosition () |
| getWorldPosition More... | |
| Eigen::Matrix3d | getWorldOrientation () |
| getWorldOrientation More... | |
| DynamicPose | getWorldDynamicPose () |
| getWorldDynamicPose More... | |
| int8_t | getComponentSize () |
| getComponentSize More... | |
| std::map< Name, Component > | getAllComponent () |
| getAllComponent More... | |
| std::map< Name, Component >::iterator | getIteratorBegin () |
| getIteratorBegin More... | |
| std::map< Name, Component >::iterator | getIteratorEnd () |
| getIteratorEnd More... | |
| Component | getComponent (Name component_name) |
| getComponent More... | |
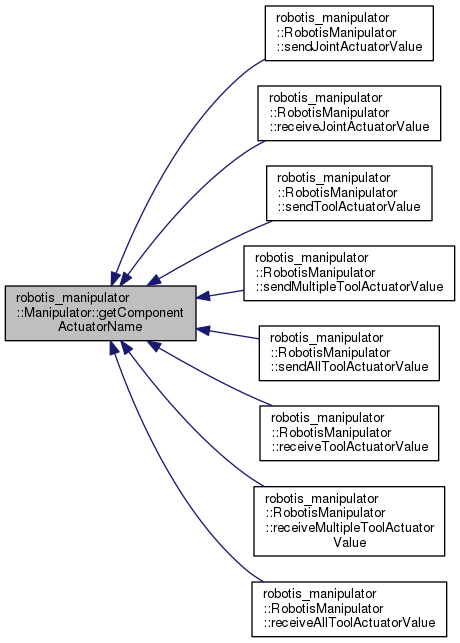
| Name | getComponentActuatorName (Name component_name) |
| getComponentActuatorName More... | |
| Name | getComponentParentName (Name component_name) |
| getComponentParentName More... | |
| std::vector< Name > | getComponentChildName (Name component_name) |
| getComponentChildName More... | |
| Pose | getComponentPoseFromWorld (Name component_name) |
| getComponentPoseFromWorld More... | |
| KinematicPose | getComponentKinematicPoseFromWorld (Name component_name) |
| getComponentKinematicPoseFromWorld More... | |
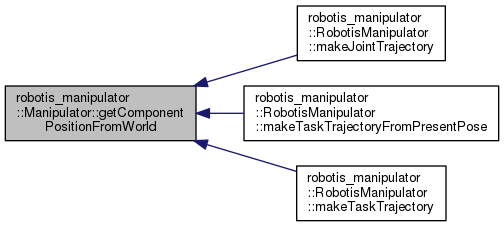
| Eigen::Vector3d | getComponentPositionFromWorld (Name component_name) |
| getComponentPositionFromWorld More... | |
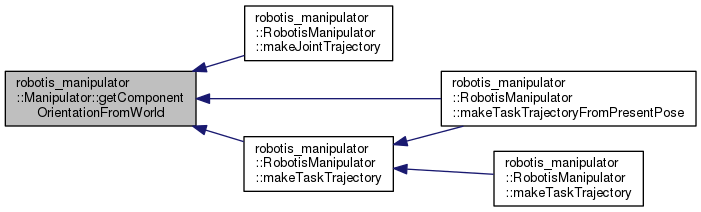
| Eigen::Matrix3d | getComponentOrientationFromWorld (Name component_name) |
| getComponentOrientationFromWorld More... | |
| DynamicPose | getComponentDynamicPoseFromWorld (Name component_name) |
| getComponentDynamicPoseFromWorld More... | |
| KinematicPose | getComponentRelativePoseFromParent (Name component_name) |
| getComponentRelativePoseFromParent More... | |
| Eigen::Vector3d | getComponentRelativePositionFromParent (Name component_name) |
| getComponentRelativePositionFromParent More... | |
| Eigen::Matrix3d | getComponentRelativeOrientationFromParent (Name component_name) |
| getComponentRelativeOrientationFromParent More... | |
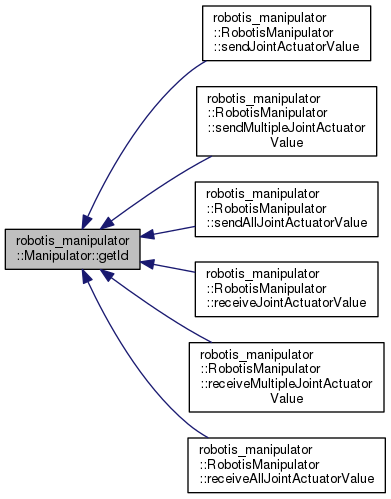
| int8_t | getId (Name component_name) |
| getId More... | |
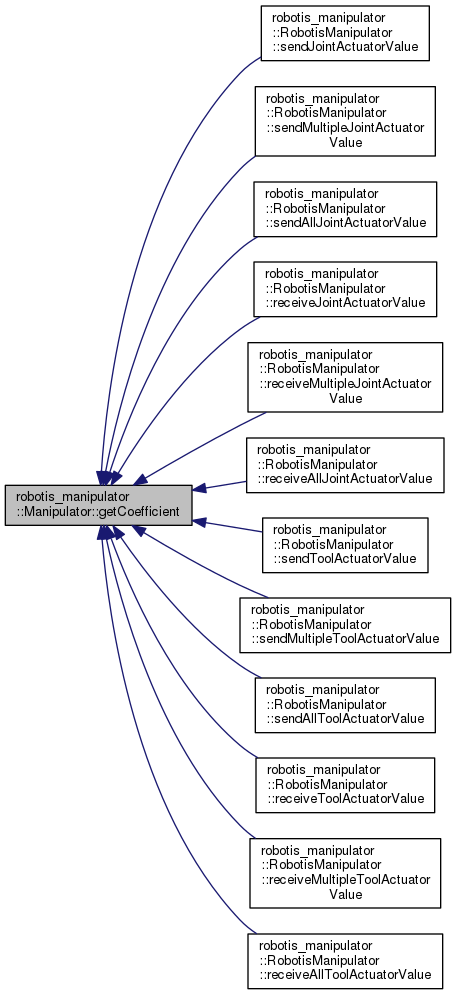
| double | getCoefficient (Name component_name) |
| getCoefficient More... | |
| Eigen::Vector3d | getAxis (Name component_name) |
| getAxis More... | |
| double | getJointPosition (Name component_name) |
| getJointPosition More... | |
| double | getJointVelocity (Name component_name) |
| getJointVelocity More... | |
| double | getJointAcceleration (Name component_name) |
| getJointAcceleration More... | |
| double | getJointEffort (Name component_name) |
| getJointEffort More... | |
| JointValue | getJointValue (Name component_name) |
| getJointValue More... | |
| double | getComponentMass (Name component_name) |
| getComponentMass More... | |
| Eigen::Matrix3d | getComponentInertiaTensor (Name component_name) |
| getComponentInertiaTensor More... | |
| Eigen::Vector3d | getComponentCenterOfMass (Name component_name) |
| getComponentCenterOfMass More... | |
| std::vector< double > | getAllJointPosition () |
| getAllJointPosition More... | |
| std::vector< JointValue > | getAllJointValue () |
| getAllJointValue More... | |
| std::vector< double > | getAllActiveJointPosition () |
| getAllActiveJointPosition More... | |
| std::vector< JointValue > | getAllActiveJointValue () |
| getAllActiveJointValue More... | |
| std::vector< double > | getAllToolPosition () |
| getAllToolPosition More... | |
| std::vector< JointValue > | getAllToolValue () |
| getAllToolValue More... | |
| std::vector< uint8_t > | getAllJointID () |
| getAllJointID More... | |
| std::vector< uint8_t > | getAllActiveJointID () |
| getAllActiveJointID More... | |
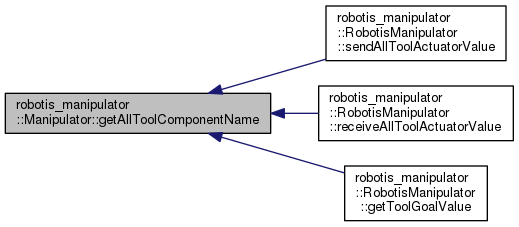
| std::vector< Name > | getAllToolComponentName () |
| getAllToolComponentName More... | |
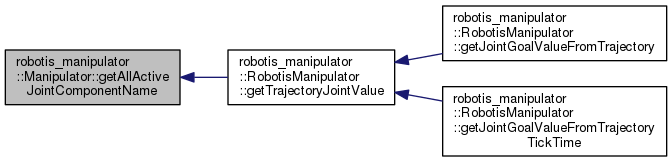
| std::vector< Name > | getAllActiveJointComponentName () |
| getAllActiveJointComponentName More... | |
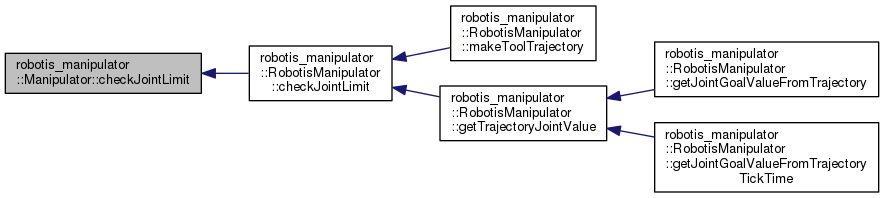
| bool | checkJointLimit (Name Component_name, double value) |
| checkJointLimit More... | |
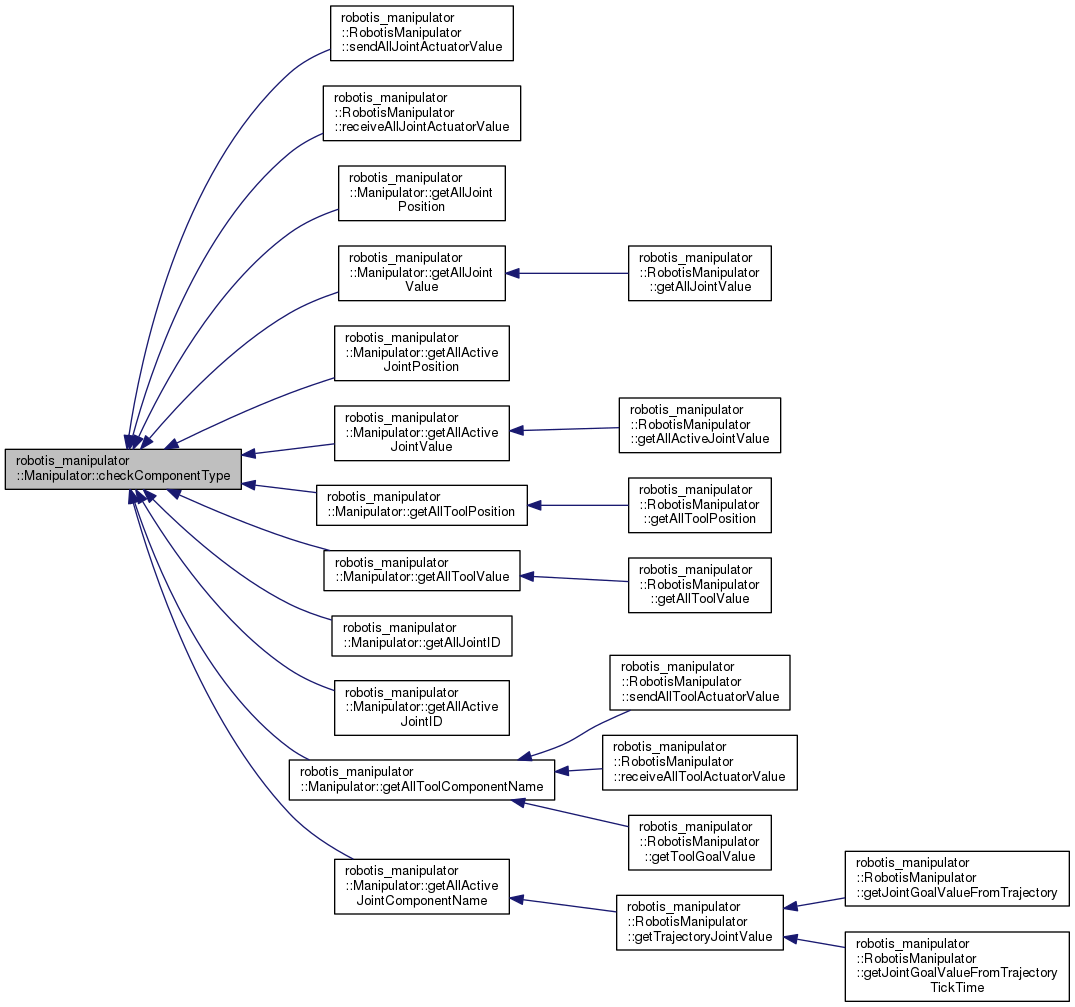
| bool | checkComponentType (Name component_name, ComponentType component_type) |
| checkComponentType More... | |
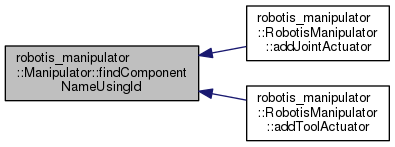
| Name | findComponentNameUsingId (int8_t id) |
| findComponentNameUsingId More... | |
Private Attributes | |
| int8_t | dof_ |
| World | world_ |
| std::map< Name, Component > | component_ |
The Manipulator class.
Definition at line 183 of file robotis_manipulator_common.h.
| Manipulator::Manipulator | ( | ) |
Definition at line 30 of file robotis_manipulator_common.cpp.
|
inline |
Definition at line 192 of file robotis_manipulator_common.h.
addComponentChild
| my_name | |
| child_name |
Definition at line 144 of file robotis_manipulator_common.cpp.

| void Manipulator::addJoint | ( | Name | my_name, |
| Name | parent_name, | ||
| Name | child_name, | ||
| Eigen::Vector3d | relative_position, | ||
| Eigen::Matrix3d | relative_orientation, | ||
| Eigen::Vector3d | axis_of_rotation = Eigen::Vector3d::Zero(), |
||
| int8_t | joint_actuator_id = -1, |
||
| double | max_position_limit = M_PI, |
||
| double | min_position_limit = -M_PI, |
||
| double | coefficient = 1.0, |
||
| double | mass = 0.0, |
||
| Eigen::Matrix3d | inertia_tensor = Eigen::Matrix3d::Identity(), |
||
| Eigen::Vector3d | center_of_mass = Eigen::Vector3d::Zero() |
||
| ) |
addJoint
| my_name | |
| parent_name | |
| child_name | |
| relative_position | |
| relative_orientation | |
| axis_of_rotation | |
| joint_actuator_id | |
| max_position_limit | |
| min_position_limit | |
| coefficient | |
| mass | |
| inertia_tensor | |
| center_of_mass |
Definition at line 50 of file robotis_manipulator_common.cpp.

| void Manipulator::addTool | ( | Name | my_name, |
| Name | parent_name, | ||
| Eigen::Vector3d | relative_position, | ||
| Eigen::Matrix3d | relative_orientation, | ||
| int8_t | tool_id = -1, |
||
| double | max_position_limit = M_PI, |
||
| double | min_position_limit = -M_PI, |
||
| double | coefficient = 1.0, |
||
| double | mass = 0.0, |
||
| Eigen::Matrix3d | inertia_tensor = Eigen::Matrix3d::Identity(), |
||
| Eigen::Vector3d | center_of_mass = Eigen::Vector3d::Zero() |
||
| ) |
addTool
| my_name | |
| parent_name | |
| relative_position | |
| relative_orientation | |
| tool_id | |
| max_position_limit | |
| min_position_limit | |
| coefficient | |
| mass | |
| inertia_tensor | |
| center_of_mass |
Definition at line 102 of file robotis_manipulator_common.cpp.

| void Manipulator::addWorld | ( | Name | world_name, |
| Name | child_name, | ||
| Eigen::Vector3d | world_position = Eigen::Vector3d::Zero(), |
||
| Eigen::Matrix3d | world_orientation = Eigen::Matrix3d::Identity() |
||
| ) |
addWorld
| world_name | |
| child_name | |
| world_position | |
| world_orientation |
Definition at line 35 of file robotis_manipulator_common.cpp.

| bool Manipulator::checkComponentType | ( | Name | component_name, |
| ComponentType | component_type | ||
| ) |
checkComponentType
| component_name | |
| component_type |
Definition at line 825 of file robotis_manipulator_common.cpp.
| bool Manipulator::checkJointLimit | ( | Name | Component_name, |
| double | value | ||
| ) |
checkJointLimit
| Component_name | |
| value |
Definition at line 815 of file robotis_manipulator_common.cpp.
| Name Manipulator::findComponentNameUsingId | ( | int8_t | id | ) |
findComponentNameUsingId
| id |
Definition at line 837 of file robotis_manipulator_common.cpp.
| std::vector< Name > Manipulator::getAllActiveJointComponentName | ( | ) |
getAllActiveJointComponentName
Definition at line 796 of file robotis_manipulator_common.cpp.

| std::vector< uint8_t > Manipulator::getAllActiveJointID | ( | ) |
getAllActiveJointID
Definition at line 765 of file robotis_manipulator_common.cpp.

| std::vector< double > Manipulator::getAllActiveJointPosition | ( | ) |
getAllActiveJointPosition
Definition at line 689 of file robotis_manipulator_common.cpp.

| std::vector< JointValue > Manipulator::getAllActiveJointValue | ( | ) |
getAllActiveJointValue
Definition at line 704 of file robotis_manipulator_common.cpp.


getAllComponent
Definition at line 529 of file robotis_manipulator_common.cpp.
| std::vector< uint8_t > Manipulator::getAllJointID | ( | ) |
getAllJointID
Definition at line 750 of file robotis_manipulator_common.cpp.

| std::vector< double > Manipulator::getAllJointPosition | ( | ) |
getAllJointPosition
Definition at line 659 of file robotis_manipulator_common.cpp.

| std::vector< JointValue > Manipulator::getAllJointValue | ( | ) |
getAllJointValue
Definition at line 674 of file robotis_manipulator_common.cpp.


| std::vector< Name > Manipulator::getAllToolComponentName | ( | ) |
getAllToolComponentName
Definition at line 781 of file robotis_manipulator_common.cpp.

| std::vector< double > Manipulator::getAllToolPosition | ( | ) |
getAllToolPosition
Definition at line 719 of file robotis_manipulator_common.cpp.


| std::vector< JointValue > Manipulator::getAllToolValue | ( | ) |
getAllToolValue
Definition at line 735 of file robotis_manipulator_common.cpp.


| Eigen::Vector3d Manipulator::getAxis | ( | Name | component_name | ) |
getAxis
| component_name |
Definition at line 614 of file robotis_manipulator_common.cpp.
| double Manipulator::getCoefficient | ( | Name | component_name | ) |
getCoefficient
| component_name |
Definition at line 609 of file robotis_manipulator_common.cpp.
getComponent
| component_name |
Definition at line 544 of file robotis_manipulator_common.cpp.
getComponentActuatorName
| component_name |
Definition at line 549 of file robotis_manipulator_common.cpp.
| Eigen::Vector3d Manipulator::getComponentCenterOfMass | ( | Name | component_name | ) |
getComponentCenterOfMass
| component_name |
Definition at line 654 of file robotis_manipulator_common.cpp.
getComponentChildName
| component_name |
Definition at line 559 of file robotis_manipulator_common.cpp.
| DynamicPose Manipulator::getComponentDynamicPoseFromWorld | ( | Name | component_name | ) |
getComponentDynamicPoseFromWorld
| component_name |
Definition at line 584 of file robotis_manipulator_common.cpp.

| Eigen::Matrix3d Manipulator::getComponentInertiaTensor | ( | Name | component_name | ) |
getComponentInertiaTensor
| component_name |
Definition at line 649 of file robotis_manipulator_common.cpp.
| KinematicPose Manipulator::getComponentKinematicPoseFromWorld | ( | Name | component_name | ) |
getComponentKinematicPoseFromWorld
| component_name |
Definition at line 569 of file robotis_manipulator_common.cpp.

| double Manipulator::getComponentMass | ( | Name | component_name | ) |
getComponentMass
| component_name |
Definition at line 644 of file robotis_manipulator_common.cpp.
| Eigen::Matrix3d Manipulator::getComponentOrientationFromWorld | ( | Name | component_name | ) |
getComponentOrientationFromWorld
| component_name |
Definition at line 579 of file robotis_manipulator_common.cpp.
getComponentParentName
| component_name |
Definition at line 554 of file robotis_manipulator_common.cpp.
getComponentPoseFromWorld
| component_name |
Definition at line 564 of file robotis_manipulator_common.cpp.

| Eigen::Vector3d Manipulator::getComponentPositionFromWorld | ( | Name | component_name | ) |
getComponentPositionFromWorld
| component_name |
Definition at line 574 of file robotis_manipulator_common.cpp.
| Eigen::Matrix3d Manipulator::getComponentRelativeOrientationFromParent | ( | Name | component_name | ) |
getComponentRelativeOrientationFromParent
| component_name |
Definition at line 599 of file robotis_manipulator_common.cpp.
| KinematicPose Manipulator::getComponentRelativePoseFromParent | ( | Name | component_name | ) |
getComponentRelativePoseFromParent
| component_name |
Definition at line 589 of file robotis_manipulator_common.cpp.
| Eigen::Vector3d Manipulator::getComponentRelativePositionFromParent | ( | Name | component_name | ) |
getComponentRelativePositionFromParent
| component_name |
Definition at line 594 of file robotis_manipulator_common.cpp.
| int8_t Manipulator::getComponentSize | ( | ) |
getComponentSize
Definition at line 524 of file robotis_manipulator_common.cpp.
| int8_t Manipulator::getDOF | ( | ) |
getDOF
Definition at line 484 of file robotis_manipulator_common.cpp.
| int8_t Manipulator::getId | ( | Name | component_name | ) |
getId
| component_name |
Definition at line 604 of file robotis_manipulator_common.cpp.
getIteratorBegin
Definition at line 534 of file robotis_manipulator_common.cpp.
getIteratorEnd
Definition at line 539 of file robotis_manipulator_common.cpp.
| double Manipulator::getJointAcceleration | ( | Name | component_name | ) |
getJointAcceleration
| component_name |
Definition at line 629 of file robotis_manipulator_common.cpp.
| double Manipulator::getJointEffort | ( | Name | component_name | ) |
getJointEffort
| component_name |
Definition at line 634 of file robotis_manipulator_common.cpp.
| double Manipulator::getJointPosition | ( | Name | component_name | ) |
getJointPosition
| component_name |
Definition at line 619 of file robotis_manipulator_common.cpp.
| JointValue Manipulator::getJointValue | ( | Name | component_name | ) |
getJointValue
| component_name |
Definition at line 639 of file robotis_manipulator_common.cpp.
| double Manipulator::getJointVelocity | ( | Name | component_name | ) |
getJointVelocity
| component_name |
Definition at line 624 of file robotis_manipulator_common.cpp.
| Name Manipulator::getWorldChildName | ( | ) |
| DynamicPose Manipulator::getWorldDynamicPose | ( | ) |
| KinematicPose Manipulator::getWorldKinematicPose | ( | ) |
getWorldKinematicPose
Definition at line 504 of file robotis_manipulator_common.cpp.
| Name Manipulator::getWorldName | ( | ) |
| Eigen::Matrix3d Manipulator::getWorldOrientation | ( | ) |
getWorldOrientation
Definition at line 514 of file robotis_manipulator_common.cpp.
| Pose Manipulator::getWorldPose | ( | ) |
| Eigen::Vector3d Manipulator::getWorldPosition | ( | ) |
getWorldPosition
Definition at line 509 of file robotis_manipulator_common.cpp.
| void Manipulator::printManipulatorSetting | ( | ) |
printManipulatorSetting
Definition at line 149 of file robotis_manipulator_common.cpp.

| void Manipulator::setAllActiveJointPosition | ( | std::vector< double > | joint_position_vector | ) |
setAllActiveJointPosition
| joint_position_vector |
Definition at line 387 of file robotis_manipulator_common.cpp.
| void Manipulator::setAllActiveJointValue | ( | std::vector< JointValue > | joint_value_vector | ) |
setAllActiveJointValue
| joint_value_vector |
Definition at line 402 of file robotis_manipulator_common.cpp.

| void Manipulator::setAllJointPosition | ( | std::vector< double > | joint_position_vector | ) |
setAllJointPosition
| joint_position_vector |
Definition at line 420 of file robotis_manipulator_common.cpp.
| void Manipulator::setAllJointValue | ( | std::vector< JointValue > | joint_value_vector | ) |
setAllJointValue
| joint_value_vector |
Definition at line 435 of file robotis_manipulator_common.cpp.
| void Manipulator::setAllToolPosition | ( | std::vector< double > | tool_position_vector | ) |
setAllToolPosition
| tool_position_vector |
Definition at line 450 of file robotis_manipulator_common.cpp.
| void Manipulator::setAllToolValue | ( | std::vector< JointValue > | tool_value_vector | ) |
setAllToolValue
| tool_value_vector |
Definition at line 465 of file robotis_manipulator_common.cpp.

setComponent
| component_name | |
| component |
Definition at line 292 of file robotis_manipulator_common.cpp.
setComponentActuatorName
| component_name | |
| actuator_name |
Definition at line 297 of file robotis_manipulator_common.cpp.
| void Manipulator::setComponentDynamicPoseFromWorld | ( | Name | component_name, |
| DynamicPose | dynamic_pose | ||
| ) |
setComponentDynamicPoseFromWorld
| component_name | |
| dynamic_pose |
Definition at line 350 of file robotis_manipulator_common.cpp.

| void Manipulator::setComponentKinematicPoseFromWorld | ( | Name | component_name, |
| KinematicPose | pose_to_world | ||
| ) |
setComponentKinematicPoseFromWorld
| component_name | |
| pose_to_world |
Definition at line 314 of file robotis_manipulator_common.cpp.

| void Manipulator::setComponentOrientationFromWorld | ( | Name | component_name, |
| Eigen::Matrix3d | orientation_to_wolrd | ||
| ) |
setComponentOrientationFromWorld
| component_name | |
| orientation_to_wolrd |
Definition at line 338 of file robotis_manipulator_common.cpp.

setComponentPoseFromWorld
| component_name | |
| pose_to_world |
Definition at line 302 of file robotis_manipulator_common.cpp.

| void Manipulator::setComponentPositionFromWorld | ( | Name | component_name, |
| Eigen::Vector3d | position_to_world | ||
| ) |
setComponentPositionFromWorld
| component_name | |
| position_to_world |
Definition at line 326 of file robotis_manipulator_common.cpp.

| void Manipulator::setJointAcceleration | ( | Name | name, |
| double | acceleration | ||
| ) |
setJointAcceleration
| name | |
| acceleration |
Definition at line 372 of file robotis_manipulator_common.cpp.
| void Manipulator::setJointEffort | ( | Name | name, |
| double | effort | ||
| ) |
setJointEffort
| name | |
| effort |
Definition at line 377 of file robotis_manipulator_common.cpp.
| void Manipulator::setJointPosition | ( | Name | name, |
| double | position | ||
| ) |
setJointPosition
| name | |
| position |
Definition at line 362 of file robotis_manipulator_common.cpp.
| void Manipulator::setJointValue | ( | Name | name, |
| JointValue | joint_value | ||
| ) |
setJointValue
| name | |
| joint_value |
Definition at line 382 of file robotis_manipulator_common.cpp.
| void Manipulator::setJointVelocity | ( | Name | name, |
| double | velocity | ||
| ) |
setJointVelocity
| name | |
| velocity |
Definition at line 367 of file robotis_manipulator_common.cpp.
| void Manipulator::setWorldAngularAcceleration | ( | Eigen::Vector3d | world_angular_acceleration | ) |
setWorldAngularAcceleration
| world_angular_acceleration |
Definition at line 287 of file robotis_manipulator_common.cpp.
| void Manipulator::setWorldAngularVelocity | ( | Eigen::Vector3d | world_angular_velocity | ) |
setWorldAngularVelocity
| world_angular_velocity |
Definition at line 277 of file robotis_manipulator_common.cpp.
| void Manipulator::setWorldDynamicPose | ( | DynamicPose | world_dynamic_pose | ) |
setWorldDynamicPose
| world_dynamic_pose |
Definition at line 267 of file robotis_manipulator_common.cpp.
| void Manipulator::setWorldKinematicPose | ( | KinematicPose | world_kinematic_pose | ) |
setWorldKinematicPose
| world_kinematic_pose |
Definition at line 252 of file robotis_manipulator_common.cpp.
| void Manipulator::setWorldLinearAcceleration | ( | Eigen::Vector3d | world_linear_acceleration | ) |
setWorldLinearAcceleration
| world_linear_acceleration |
Definition at line 282 of file robotis_manipulator_common.cpp.
| void Manipulator::setWorldLinearVelocity | ( | Eigen::Vector3d | world_linear_velocity | ) |
setWorldLinearVelocity
| world_linear_velocity |
Definition at line 272 of file robotis_manipulator_common.cpp.
| void Manipulator::setWorldOrientation | ( | Eigen::Matrix3d | world_orientation | ) |
setWorldOrientation
| world_orientation |
Definition at line 262 of file robotis_manipulator_common.cpp.
| void Manipulator::setWorldPose | ( | Pose | world_pose | ) |
| void Manipulator::setWorldPosition | ( | Eigen::Vector3d | world_position | ) |
setWorldPosition
| world_position |
Definition at line 257 of file robotis_manipulator_common.cpp.
Definition at line 188 of file robotis_manipulator_common.h.
|
private |
Definition at line 186 of file robotis_manipulator_common.h.
|
private |
Definition at line 187 of file robotis_manipulator_common.h.
 1.8.11
1.8.11 
