|
Robotis Manipulator
1.0.0
|
|
Robotis Manipulator
1.0.0
|
#include <unistd.h>#include <eigen3/Eigen/Eigen>#include <eigen3/Eigen/LU>#include <math.h>#include <vector>#include <map>#include "robotis_manipulator_math.h"#include "robotis_manipulator_log.h"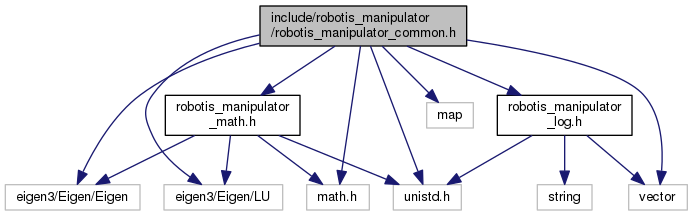
Go to the source code of this file.
Classes | |
| struct | robotis_manipulator::KinematicPose |
| struct | robotis_manipulator::Dynamicvector |
| struct | robotis_manipulator::DynamicPose |
| struct | robotis_manipulator::Inertia |
| struct | robotis_manipulator::Limit |
| struct | robotis_manipulator::Time |
| struct | robotis_manipulator::Point |
| struct | robotis_manipulator::Pose |
| struct | robotis_manipulator::ChainingName |
| struct | robotis_manipulator::Relative |
| struct | robotis_manipulator::JointConstant |
| struct | robotis_manipulator::World |
| struct | robotis_manipulator::Component |
| class | robotis_manipulator::Manipulator |
| The Manipulator class. More... | |
Namespaces | |
| robotis_manipulator | |
| main namespace | |
 1.8.11
1.8.11 
