
개요

BT-410 동글
BT-410동글은 USB 2.0 인터페이스와 블루투스 4.0 저전력 표준 통신 인터페이스(마스터 기능)를 지니고 있으며 두 인터페이스를 변환해 주는 부품입니다.
즉, BT-410동글을 PC에 장착하고 BT-410 SLAVE 모듈(1개)과 페어링을 하면 PC와 BT-410 SLAVE 모듈이 서로 데이터를 주고 받을 수 있습니다.
(각 부품에 장착하는 방법은 부품별 설명 페이지를 참고하세요.)
1. BT-410 동글과 연동이 가능한 무선통신 모듈
- BT-410 Slave 모듈
2. BT-410 동글과 연동이 불가능한 무선통신 모듈
- BT-410 MASTER 모듈
- BT-210 MASTER 모듈
- BT-210 SLAVE 모듈
- BT-100/110A
- ZIG-100/110A
사용 예시
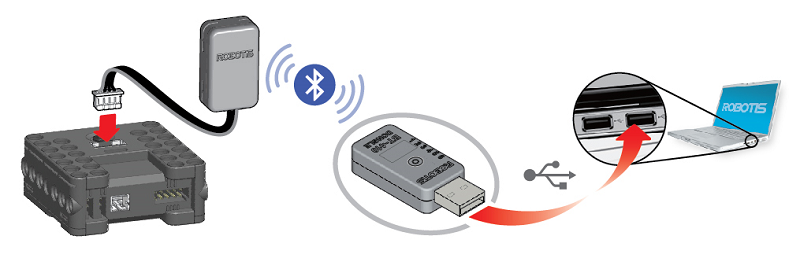
주의: 제어기의 전원이 반드시 꺼져있는 상태에서 제품을 연결해주세요. 전원이 켜져있는 상태에서 연결시, 오동작 및 고장을 일으킬 수 있습니다.
제품 사양
| 항목 | 세부 내용 |
|---|---|
| 무게 | 7.5g |
| 크기 | 50.5mm x 20mm x 10.5mm |
| 블루투스 사양 | Bluetooth Specification 4.0 Low Energy Support |
| 유효 통신거리 | 10M |
| 주파수 대역 | 2.4GHz ISM Band |
| Bandwidth | MAX 128kbps |
| 기본 통신속도 | 57,600bps |
| 동작 전압 | 5.0V |
| 소모전류 | 25mA (Max) |
| 동작 온도 | 0°C ~ 40°C |
| 통신속도 | 1,200bps ~ 1,000,000bps |
| 안테나 | Chip Antenna |
| 인터페이스 | USB 2.0 Full Speed |
| 감도 | -81dBm (Typical) |
| 공중선전력 | -6 ~ 4dBm (Class 2) |
사용 가능한 통신속도
| 통신속도 | BT-210 FW v12 이하 |
BT-210 FW v13 이상 |
BT-410/BT-410 동글 |
|---|---|---|---|
| 1200 | X | X | O |
| 2400 | X | X | O |
| 4800 | X | X | O |
| 9600 | O | O | O |
| 14400 | X | X | O |
| 19200 | O | O | O |
| 28800 | X | X | O |
| 38400 | O | O | O |
| 57600 | O | O | O |
| 76800 | X | X | O |
| 115200 | O | O | O |
| 230400 | O | O | O |
| 250000 | O | O | O |
| 460800 | O | O | O |
| 921600 | O | O | O |
| 1000000 | X | O | O |
| 1382400 | O | O | X |
| 1500000 | X | O | X |
| 2000000 | X | O | X |
| 2500000 | X | O | X |
| 3000000 | X | O | X |
| 4000000 | X | O | X |
호환성
BT-410 동글과 BT-410 Slave 모듈의 조합으로 가능한 작업
| 제품 | 펌웨어 복구 R+ Manager 2.0 |
펌웨어 업데이트 R+ Manager 2.0 |
Entry | R+ Scratch | Task 2.0 다운로드 |
R+ Motion 2.0 다운로드 |
|---|---|---|---|---|---|---|
| CM-50 | O | O | - | O (영문버전) | O | - |
| CM-150 | O | O | - | - | O | - |
| CM-200 | O | O | - | - | O | O |
| CM-530 | O | O | - | - | O | O |
| OpenCM7.0 | O | O | O | O | O | - |
| OpenCM9.04 | O | O | - | - | O | O |
| 자동차로봇 | - | - | O | O | - | - |
통신 모드
BT-410 동글은 페어링 연결을 통해 신뢰성 있는 1:1 통신을 할 수 있습니다.
1:1 통신
- 전원이 켜진 PC의 USB 포트에 장착하면 파란색 LED가 깜박이며, BT-410 SLAVE 모듈과 페어링이 성공하게 되면 파란색 LED가 계속 켜져 있게 됩니다.
- 자동페어링 방법 : BT-410 동글의 파란 LED가 깜박일 때(페어링 되어 있지 않음) BT-410 SLAVE 모듈을 가까이 갖다 대면(10cm 이내) 자동으로 페어링이 됩니다. (그 이후는 먼 거리에서도 페어링 되어 통신 가능.)
BT-410 동글 설정하기
시스템 리셋, SLAVE 주소 설정, 자동페어링 기능 활성화/비활성화, 모드 변경 불가
설정
-
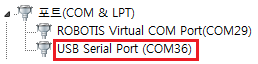
BT-410 동글을 PC에 연결 한 다음 드라이버 설치 후 COM포트 번호를 확인 합니다.
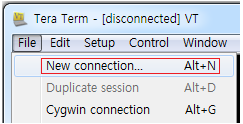
다운로드Tera Term
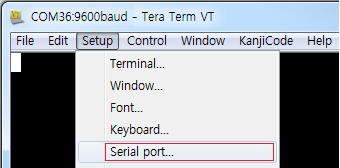
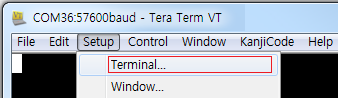
- 해당 COM포트로 Tera Term 터미널 프로그램을 실행하고 File > a New connection 을 클릭합니다.
-
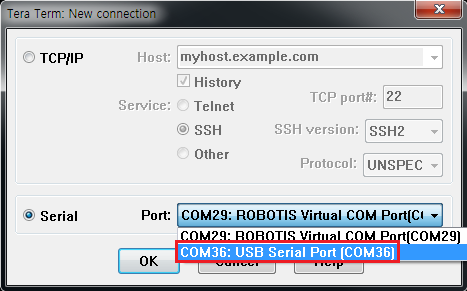
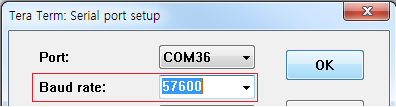
BT-410 동글의 COM 포트 번호를 선택
-
Serial Port 설정창
-
통신속도를 57600 으로 설정
-
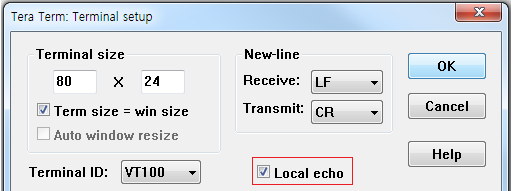
Terminal 설정창
-
Local echo 기능 활성화
-
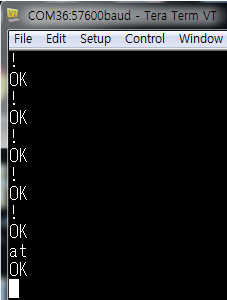
터미널에서 아래와 같이 !표를 입력하면 OK가 뜨고 커맨드 모드로 진입합니다. 여기서 AT를 입력하고 엔터를 치면 계속 OK가 뜨는 것이 확인되면 성공적으로 BT-410과 연결되었고 설정을 할 수 있습니다.
-
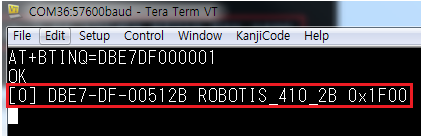
주변장치 검색 기능입니다. 아래와 같이 AT+BTINQ=DBE7DF000001를 입력 후 엔터를 누르면 현재 주변 BLE 장치 중 MAC 주소가 DBE7DF000001 이상인 장치들이 검색됩니다.
-
장치 연결은 AT+BTINQ 커맨드로 주변 장치 검색을 하고 난 뒤 표시된 블루투스 어드레스(16진수 12자리)를 통해 페어링 연결 합니다. 예를 들면 위의 DBE7-DF-000001이라는 블루투스 어드레스를 ‘-‘표시 제외하고 ATDDBE7DF000001이라고 입력 후 엔터를 누르면 연결을 시도합니다.
AT 명령어
아래와 같이 터미널에서 AT 커맨드를 통해 BT-410 동글의 설정을 변경할 수 있고 AT커맨드의 종류는 아래와 같습니다.
-
시스템 리셋
ATZ를 입력 후 엔터를 누르면 아래와 같이 BT-410 동글이 재시작 됩니다. 만약 설정을 변경하였다면 변경된 모드로 재시작합니다.
-
주변장치 검색
아래와 같이 AT+BTINQ를 입력 후 엔터를 누르면 현재 주변 블루투스 장치 중 MAC 주소가 DBE7DF000001 이상인 장치들이 검색됩니다.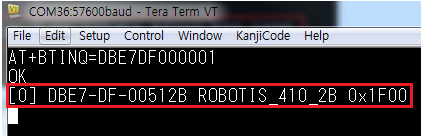
-
자동 페어링
페어링 되지 않은 BT-410 SLAVE 모듈을 BT-410 동글 가까이(대략 10cm 이내) 근접시키면 자동을 페어링 됩니다. -
자동 페어링 기능 비활성화
AT+BTAUTOPAIR=0 을 입력 후 ENTER 키 입력
몇 초 뒤에 아래와 같이 성공메세지가 출력됨

-
자동 페어링 기능 활성화
AT+BTAUTOPAIR=1 을 입력 후 ENTER 키 입력
몇 초 뒤에 아래와 같이 성공 메세지가 출력됨

-
통신속도 변경
AT+BTUART,baudrate,parity_bit,stop_bit
ExampleAT+BTUART,57600,n,1
드라이버 설치 확인방법
BT-410 동글 드라이버가 PC에 바르게 설치되었는지 확인하는 방법은 다음과 같습니다.
-
PC 의 USB 포트에 BT-410 동글을 연결합니다.

-
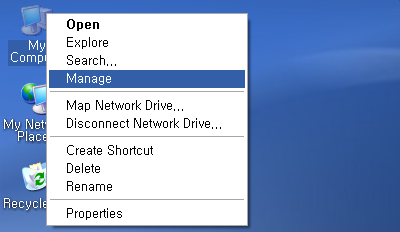
내 컴퓨터 위에서 마우스 오른쪽 클릭으로 뜨는 팝업 메뉴의 관리를 선택합니다.
-
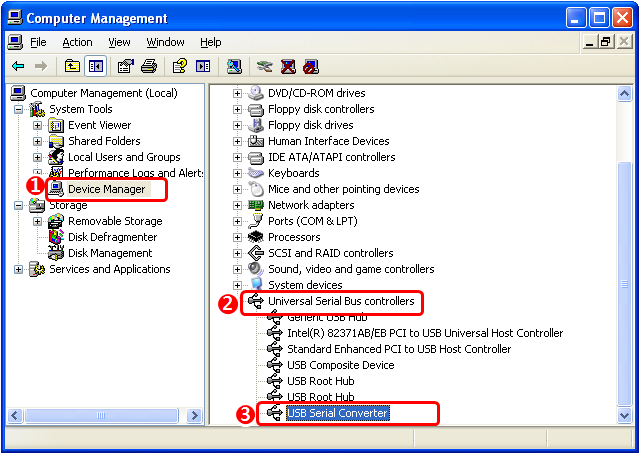
‘장치 관리자‘의 ‘범용 직렬 버스 컨트롤러’ 장치 목록에서 ‘USB Serial Converter’ 를 확인합니다.
-
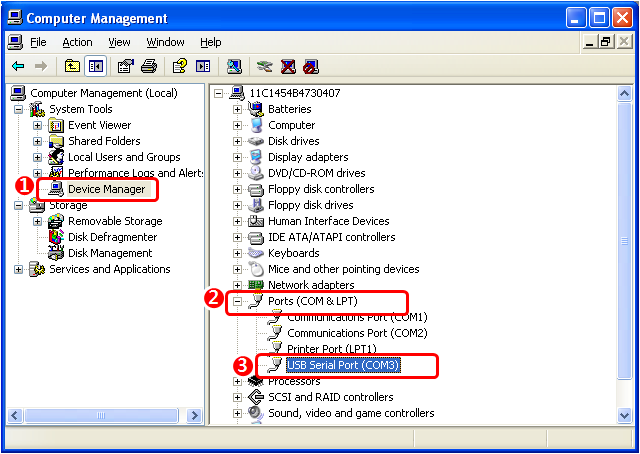
‘포트 (COM 및 LPT)’ 장치 목록에서 ‘USB Serial Port(COMx)’ 를 확인합니다. (COM 포트 번호는 시스템마다 다를 수 있습니다.)
드라이버 수동 설치
참고: RoboPlus 를 설치하게 되면 자동으로 FTDI Driver (USB2DYNAMIXEL, USB다운로더(LN-101), BT-410 동글 드라이버)가 설치됩니다. 만약 RoboPlus 를 설치하지 않고, 해당 드라이버를 설치하거나, RoboPlus 설치 시 드라이버가 제대로 설치되지 않았을 경우 아래와 같은 방법으로 드라이버를 수동으로 설치하십시오.
-
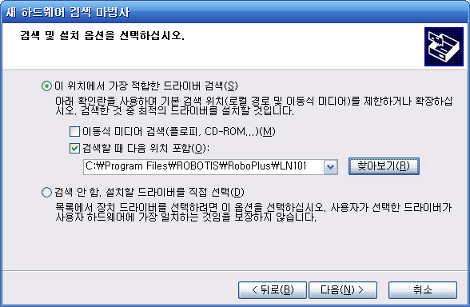
PC 에 장치를 연결합니다. 드라이버가 설치되어 있지 않을 경우 새 하드웨어 검색 마법사 시작 창이 뜹니다.
목록 또는 특정 위치에서 설치(고급)(S) -> 다음(N)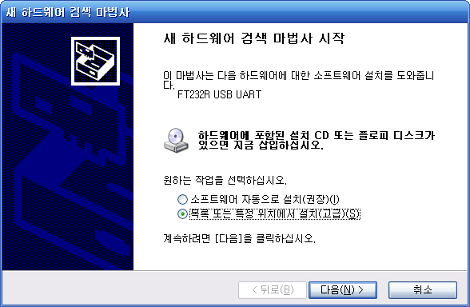
-
드라이버의 위치를 지정합니다.
RoboPlus 를 설치한 경우 드라이버는 RoboPlus 설치 폴더의 LN101 폴더에 있습니다.
또는 최신 버전의 드라이버를 설치하고자 하는 경우 FTDI Driver Download 페이지에서 VCP Drivers 의 최신 버전을 받으시면 됩니다.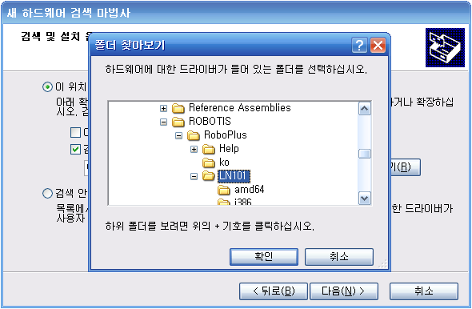
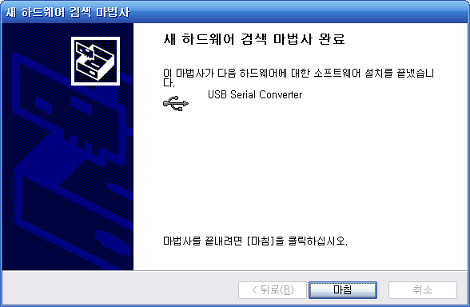
-
다음(N) 을 누르면 설치가 진행되며 USB Serial Converter 의 드라이버 설치가 완료됩니다.
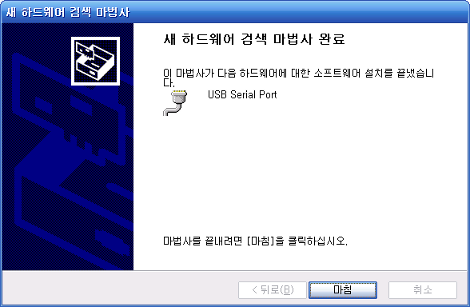
-
동일한 방법으로 USB Serial Port 드라이버도 설치해 줍니다.
참고자료
인증 획득
표기되지 않은 인증에 대해서는 별도 문의하시기 바랍니다.
- KCC, FCC, CE