
Edit on GitHub
개요

RC-300
블루투스(Bluetooth Low Energy) 통신을 통해 로봇을 조종할 수 있는 장치입니다.
참고
- RC-300은 전원이 켜지면 파란색 LED 가 켜집니다.
- RC-300은 BLE Slave 장치와 연결되지 않은 경우에는 파란색 LED가 깜박이고 연결된 이후에는 파란색 LED가 계속 켜져있습니다.
제품 사양
| 항목 | 설명 |
|---|---|
| 무게 | 72.4g |
| 크기 | 138mm x 105mm x 36mm |
| 동작 전압 | 3.0V (DC) |
| 소비전력 | 0.05W |
| 배터리 | 알랄라인(LR6) AA 건전지 x 2 |
| 버튼 | 11 버튼 (전원/모드 버튼 포함) |
| 통신 방식 | BLE (마스터) |
사용 방법
- 전원 켜기
- 가운데의 POWER 버튼이 전원 버튼으로, 전원이 꺼진 상태에서 가볍게 1초 동안 누르면 파란색 LED 가 켜지면서 전원이 켜집니다.
- LED (전원 표시 및 BLE 연결상태 표시)
- BLE Slave 장치와 연결이 되지 않은 경우 파란색 LED가 깜박입니다.
- BLE Slave 장치와 연결이 되면 파란색 LED가 깜박이지 않고 켜져 있습니다.
- 전원 끄기
- 가운데의 POWER 버튼을 길게 (약 2초 이상) 누르면 파란색 LED 가 빠르게 4회 깜박인 후 전원이 꺼집니다.
- 자동 절전 모드
- RC-300은 3분간 사용하지 않으면 (아무 버튼도 누르지 않으면) 배터리 소모를 줄이기 위해 자동으로 전원이 꺼집니다.
- 건전지 전압이 낮아 교체가 필요한 경우 LED를 빠르게 4회 깜박이고 절전모드로 진입합니다.
- 버튼 눌림 상태 전송
- RC-300 는 켜져있는 동안 U/D/L/R/1/2/3/4/5/6 버튼이 눌리면, 눌린 버튼에 해당하는 패킷을 페어링 된 BLE SLAVE 장치에게 전송합니다.
- 버튼을 모두 떼는 순간에도 버튼이 눌리지 않음을 나타내는 패킷을 전송합니다.
- 패킷과 관련된 내용은 리모콘 코드 맵을 참조하십시오.
연결하기
사용 가능한 무선모듈 및 제어기 (1:1 페어링)
| 모듈 | RC-300 |
|---|---|
| RB-100 | O |
| RB-86 / RB-88 | O |
| CM-151 | O |
| BT-410 Slave 모듈 | O |
| BT-410 Master 모듈 | X |
| BT-210 Slave / Master 모듈 | X |
| BT-100/110A | X |
| ZIG-100/110A | X |
연결 방법
- RC-300의 파란 LED가 깜박이는지 확인합니다.
- 연결하려는 BLE Slave 장치의 LED가 깜박이는지 확인합니다.
- RC-300을 연결하려는 BLE Slave 장치에 가깝게 이동합니다.
- 페어링에 성공하면 두 장치 모두 LED가 깜박이지 않고 켜져 있게 됩니다.
- 최초 페어링시에만 이처럼 근접 페어링이 필요하고 다음부터는 유효거리 (약 10m) 이내에서는 전원만 켜지면 자동으로 서로 페어링 됩니다.
리모콘 코드 맵
RC-300 조종기의 버튼을 누르면 아래 코드맵에서와 같이 각 버튼에 해당하는 코드 값이 송신됩니다.
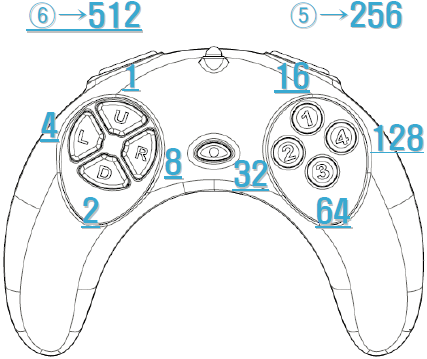
2개 이상의 버튼을 누른 경우에는 눌려진 각 버튼 코드 값의 합이 송신됩니다.
예제U 버튼 + 3 버튼 => U 버튼 코드 값 1 + 3 버튼 코드 값 64 = 65 (송신 값)예제1 버튼 + 5 버튼 => 1 버튼 코드 값 16 + 5 버튼 코드 값 256 = 272 (송신 값)
통신 패킷
RC-300은 RC-100 시리즈 조종기와 마찬가지로 통신 패킷을 아래와 같은 형식으로 사용하고 있습니다.

~는 Inverse(1의 보수)를 뜻합니다.예제~0xAA -> 0x55, ~0xF0 -> 0x0F예제DATA: 0x1234 ->Packet: 0xFF 0x55 0x34 0xCB 0x12 0xED
건전지 넣는 방법
-
뒷 뚜껑을 연다.

-
건전지를 1개 넣는다. (극성에 주의)

-
다음 건전지를 넣는다.

-
꾹 눌러서 건전지 삽입을 완료한다.

활용 방법
-
알블록
알블록를 통해 로봇을 조종하는 프로그램을 만들 수 있습니다. -
Zigbee SDK
Zigbee SDK를 통해 C언어로 ZIGBee를 제어할 수 있습니다.