
시작하기
다이나믹셀 선택 가이드는 다이나믹셀을 처음 시작하는 유저를 위해 만들어진 문서입니다.
사용자의 개발환경에 적합한 제품과 개발도구를 선택 하는것이 좋습니다. 아래 4가지 항목들을 참고하여, 사용자의 시스템에 적합한 다이나믹셀 및 호환되는 제품과 개발 도구를 선택하세요.
스토어
다이나믹셀 제품들은 로보티즈 스토어에서 구매 가능합니다. (PSU 제외)
해외에서 거주하는 유저들은 2~4번 링크를 이용하세요.
- ROBOTIS Shop (한국): https://www.robotis.com/shop/
- ROBOTIS America (USA): https://robotis.us/
- ROBOTIS Japan: https://e-shop.robotis.co.jp/
- ROBOTIS China: TaoBao
다이나믹셀
사용자의 사용 목적에 따라, 다양한 다이나믹셀을 선택 할 수 있습니다. 각 모델이 가지는 특성과 성능 그래프 및 통신 방식을 참고 해주세요.
모델
다이나믹셀은 모델별로 다양한 특성(성능, 폼팩터, 기어비, 전압범위, 통신 인터페이스)을 가지고 있습니다. 아래의 네이밍 규칙에서, 각 모델이 가지는 특성을 간편하게 확인 하세요.
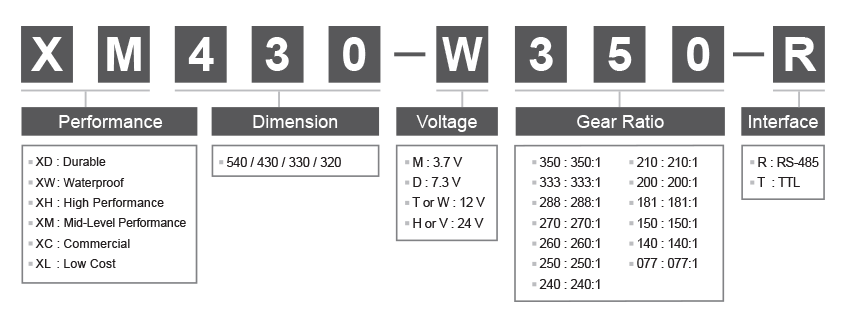
다이나믹셀-X 네이밍 규칙
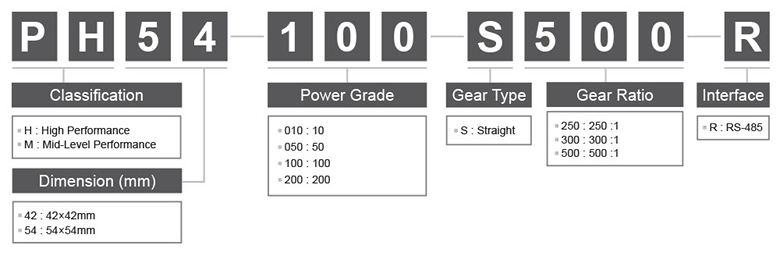
다이나믹셀-P 네이밍 규칙
성능 그래프
성능 그래프(N-T 그래프)는 다이나믹셀의 전반적인 성능을 파악할 수 있도록, 입력(토크)에 따른 각 데이터의 측정치를 보여줍니다.
시스템의 요구 조건에 따라, 적합한 성능 그래프(N-T 그래프)를 가지는 다이나믹셀을 선택하세요.
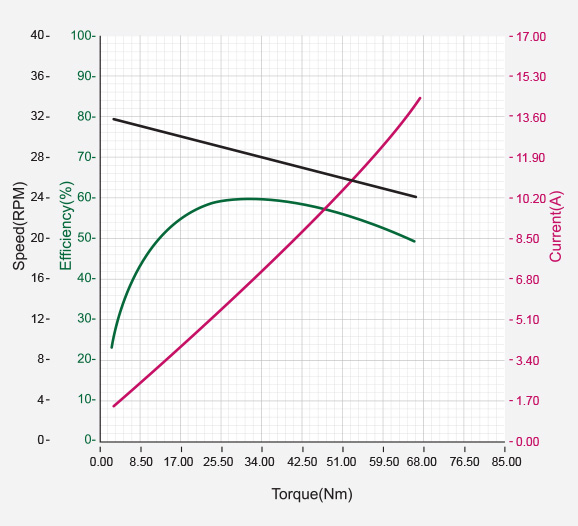
성능 그래프 (N-T 그래프)
참고: Stall Torque의 20%가 일반적인 시스템의 사용범주에 속합니다. Stall Torque는 제품 e-Manual의 주요 사양을 참고하세요.
-
Torque(Nm) - 다이나믹셀 출력축의 외부 부하(Nm)입니다. Torque(Nm)를 기준으로, 그래프의 출력 Speed(RPM)와 출력 Current(A)가 결정됩니다.
-
Speed(RPM) - 다이나믹셀의 출력 속도(RPM)입니다. Torque(Nm)를 기준으로 Speed(RPM)는 그래프의 검은색 선에 따라 변화됩니다.
-
Current(A) - 다이나믹셀의 출력 전류입니다. Torque(Nm)를 기준으로 Current(A)는 그래프의 빨간색 라인을 따라 변화됩니다.
-
Efficiency(%) - 내부의 DC 모터와 기어 세트를 거친 출력 효율입니다. 내부의 DC 모터와 기어 세트에 따라 출력 효율은 부하와 속도 측면에서 달라질 수 있습니다. Torque(Nm)를 기준으로 Efficiency는 그래프의 초록색 선에 따라 변화됩니다.
통신
다이나믹셀은 컨트롤 테이블(데이터 필드 집합)에 할당된 주소값에 접근하여 데이터를 쓰고 읽습니다. 각 다이나믹셀의 데이터를 쓰고 읽기 위해서는 반드시 동일한 통신 인터페이스(TTL 또는 RS-485)를 사용하세요.
 팁: TTL과 RS-485를 같이 사용할 수 있는 방법이 있나요?
팁: TTL과 RS-485를 같이 사용할 수 있는 방법이 있나요?
일반적으로 서로 다른 통신 인터페이스를 지원하는 다이나믹셀은, 동일한 통신 버스를 사용할 수 없습니다. 서로 간의 통신을 해석 하기위해서는 통신변환 인터페이스인 다인나믹셀 커뮤니케이션 브릿지를 사용하세요.

TTL
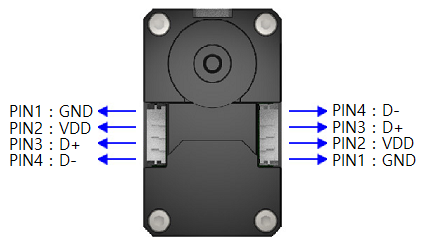
0 ~ 5V 논리레벨을 가지는 TTL은 다이나믹셀의 기본 통신 방식 중 하나입니다. TTL 인터페이스를 사용하는 다이나믹셀은 연결 커넥터가 3핀으로 되어있으며, 네이밍 규칙에 따라 모델 이름이 “-T”로 끝이 납니다. 예를 들어, XL330-M288-T는 TTL 기반의 통신 인터페이스를 사용하여 통신해야 합니다.
다이나믹셀 커넥터 (3핀 JST, -T 모델)
팁: 다이나믹셀 통신회로 (TTL)
다이나믹셀을 제어하기 위해서는, 메인 제어기의 UART 신호를 Half-Duplex 타입으로 변환해야합니다. 다음은 그 권장 회로도입니다.
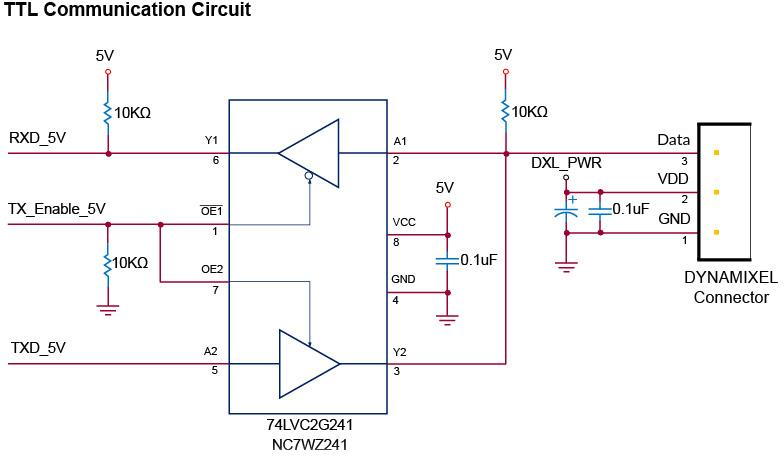
참고: 위 회로는 5V 전원을 사용하는 MCU를 사용하거나 IO가 5V tolerant한 경우 사용 가능합니다. 그 외의 경우, Level Shifter를 사용하세요.
참고: XL330 시리즈의 통신 버스의 전압은 3.3V 이지만, 5V 통신 버스와도 호환됩니다.
RS-485
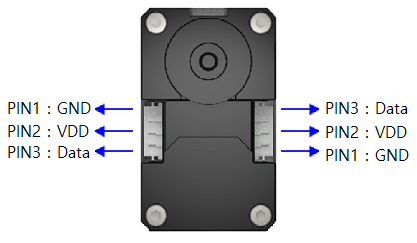
장거리 통신을 위해서는 RS-485 모델을 선택하는 것이 좋습니다. RS-485을 사용하는 모델은 커넥터가 4핀으로 이루어져 있으며, 네이밍 규칙에 따라 이름이 “-R”로 끝이 납니다. 예를 들어, XD40-T150-R은 RS-485 기반의 통신 인터페이스를 사용하여 통신해야 합니다.
다이나믹벨 커넥터 (4핀 JST, -R 모델)
팁: 다이나믹셀 통신 회로 (RS-485)
다이나믹셀을 제어하기 위해서는, 메인 제어기의 UART 신호를 Half-Duplex 타입으로 변환해야합니다. 다음은 그 권장 회로도입니다.
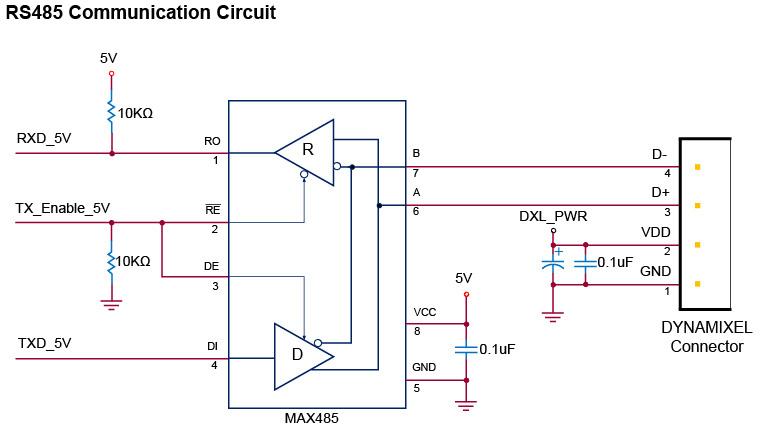
참고: 위 회로는 5V 전원을 사용하는 MCU를 사용하거나 IO가 5V tolerant한 경우 사용 가능합니다. 그 외의 경우, Level Shifter를 사용하세요.
전원
다이나믹셀의 사용 전압에 따라, 적절한 전압을 공급하는 것이 중요합니다. 선택 가이드에서는 다이나믹셀과 자주 사용되는 전원 솔루션을 제공합니다.
참고: 다이나믹셀을 데이지 체인으로 연결 시, 커넥터가 받아드릴 수 있는 허용 전류를 고려하는 것이 좋습니다. 허용 전류는 커넥터 정보 (예시: XD540-T150 커넥터 정보)를 참고하세요. 선택한 다이나믹셀에 따라 사용되는 커넥터의 종류는 다를 수 있습니다. (예시: JST 또는 Molex)
사용 전압
전원을 선택하기 전에, 다이나믹셀 모델별 사용 전압을 확인하세요.
다이나믹셀 X 시리즈
다이나믹셀 X 시리즈의 사용 전압은 모델에 따라 달라질 수 있습니다. 아래 표를 참고하세요.
| Symbol | 사용 전압 | 추천 전압 |
|---|---|---|
| M | 3.7 ~ 6.0 | 5.0 |
| T / W | 10.0 ~ 14.8 (Max 12V for XL430, XC330) |
12.0 (11.1V for XL430, XC330) |
| H / V | 24.0 | 24.0V |
참고: Symbol 은 다이나믹셀-X의 네이밍 규칙을 참고하세요. 다이나믹셀 AX 및 MX 시리즈의 사용 전압은 DYNAMIXEL.com의 Voltage를 참고하세요.
다이나믹셀 P 시리즈
다이나믹셀 P 시리즈는 24V에서 동작합니다. 다이나믹셀-X 시리즈의 24V 동작전압을 표현하는 V모델과 호환 가능합니다.
전원 솔루션
SMPS
SMPS는 인터페이스 또는 제어기를 통해 다이나믹셀에 전압을 공급하는 안정적인 전원 솔루션입니다. 로보티즈에서 제공되는 제어기와 인터페이스는 2.5mm ID / 5.5 mm OD, Center Positive 규격의 SMPS 호환 커넥터를 지원합니다.

SMPS 12V, 5A
배터리
배터리는 시스템의 자유로운 이동에 필요한 전원 솔루션입니다. 방전율이 높고, 용량이 큰 LiPo 배터리를 사용하게 된다면 전체 시스템에 장시간 충분한 전류를 제공할 수도 있습니다. 시스템의 안전을 위해 PCM(Protection Circuit Modules)이 내장되어있는 배터리를 선택하는 것이 권장됩니다.

LiPo 배터리 (LB-012) 11.1V 1800mAh
PSU
시스템에서 PSU는 넓은 범위의 전원 선택지를 제공합니다. 24V 사용 전압을 가진 다이나믹셀 P 시리즈 및 다이나믹셀 X 시리즈의 V 모델과 함께 사용할 때, PSU가 적합한 솔루션이 될 수 있습니다. 전압 안정을 위해 충분한 용량과 전력이 공급되는 모델을 사용하는 것이 권장됩니다.
제어기와 인터페이스
제어기와 인터페이스는 다이나믹셀의 데이터를 읽거나 쓰기 위해 사용합니다. 다이나믹셀을 처음 시작한다면, 추천 제어기와 인터페이스를 사용하세요.
참고: 제어기 호환표에서 다이나믹셀 및 여러제품의 호환성을 확인해보세요.
인터페이스
U2D2
U2D2는 USB 신호를 TTL 또는 RS-485 신호로 변환해주는 통신 변환 인터페이스입니다. PC에 U2D2와 같은 통신 인터페이스를 연결하여, 다이나믹셀 위자드 2.0 및 다이나믹셀 SDK등을 활용하세요.

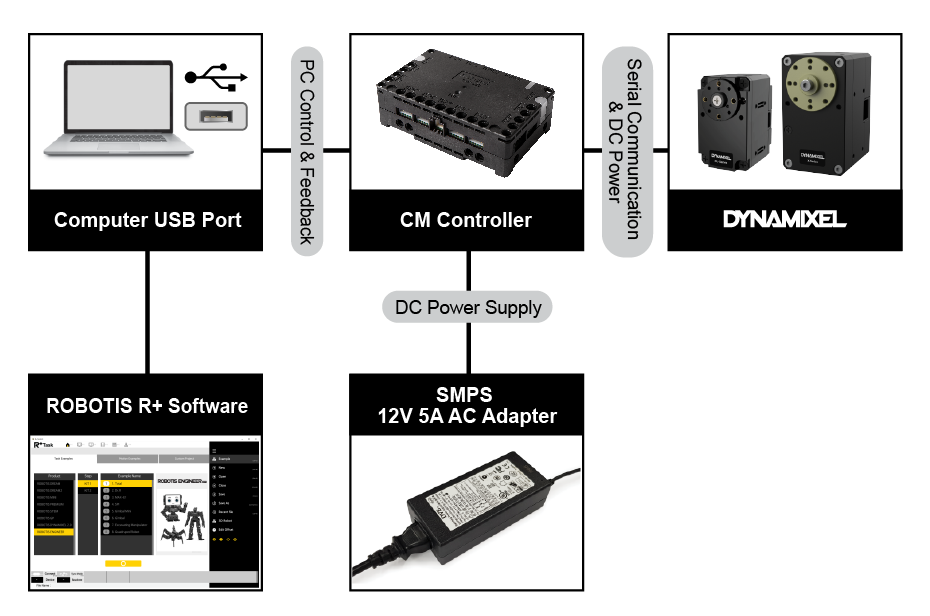
아래의 다이나믹셀 스타터세트는, 다이나믹셀 개발(다이나믹셀 SDK) 및 테스트 (다이나믹셀 위자드 2.0)을 시작할 수 있도록 준비된 패키지입니다: U2D2, U2D2 Power Hub Board, SMPS 12V 5A AC Adapter
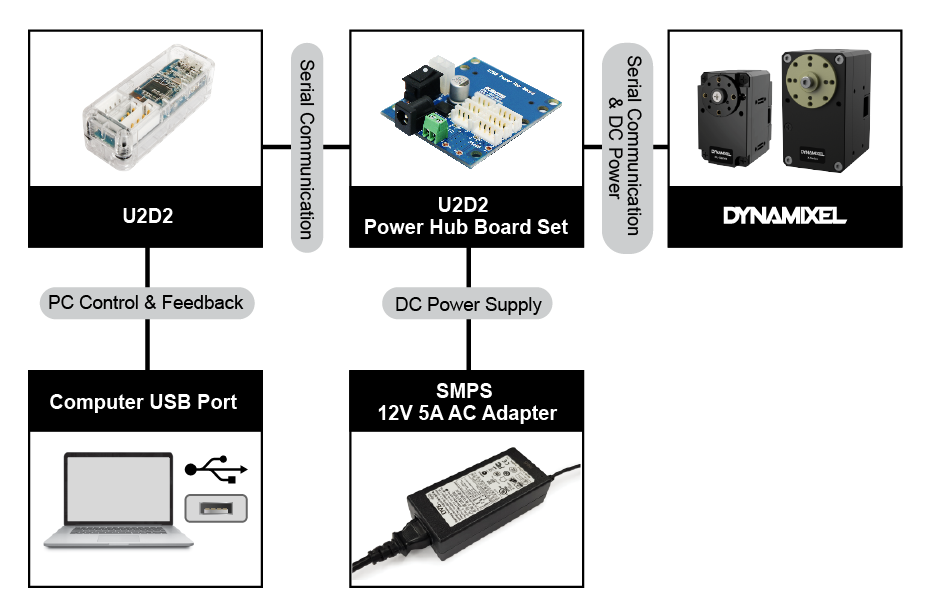
다이나믹셀 스타터 세트 연결 예시
다이나믹셀 쉴드
다이나믹셀 쉴드 및 다이나믹셀 쉴드 MKR은 아두이노 보드를 가지고 있는 유저들을 위한, 쉴드 인터페이스입니다. DynamixelShield 라이브러리를 사용하여, 아두이노 환경에서 다이나믹셀을 사용해보세요.
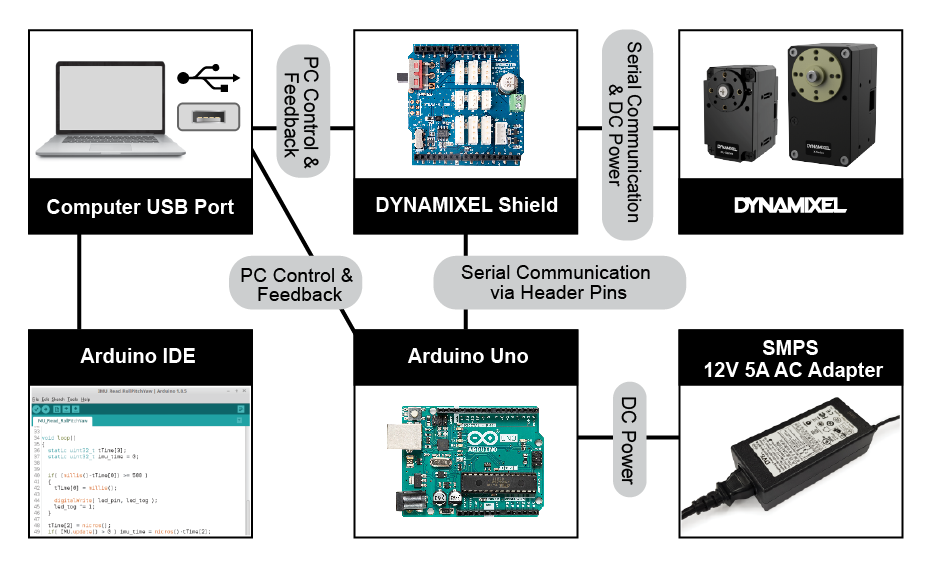
다이나믹셀 쉴드 연결 예시
임베디드 제어기
로보티즈에서 제공하는 임베디드 제어기는 아두이노 환경을 지원합니다.
OpenRB-150
OpenRB-150은 아두이노와 호환되는 오픈소스 제어기입니다.
아두이노 MKR 보드와 동일한 폼팩터를 특징으로, MKR 악세사리와 호환 및 프로그래밍 할 수 있습니다.
4개의 다이나믹셀 전용 포트를 가지고 있으며, 다이나믹셀 전용 소프트웨어인 다이나믹셀 위자드 2.0을 사용할 수 있습니다.
- 아두이노 IDE 지원
- 아두이노 MKR 쉴드 호환
- 4개의 다이나믹셀 TTL 전용 커넥터
- 다이나믹셀의 손쉬운 사용과 관리를 위한 다이나믹셀 위자드 2.0 지원
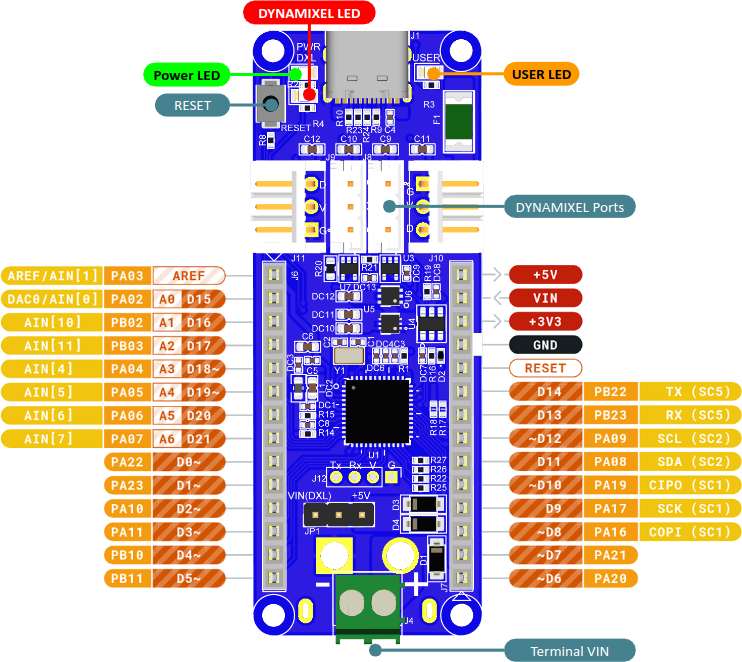
OpenRB-150 핀맵 및 레이아웃
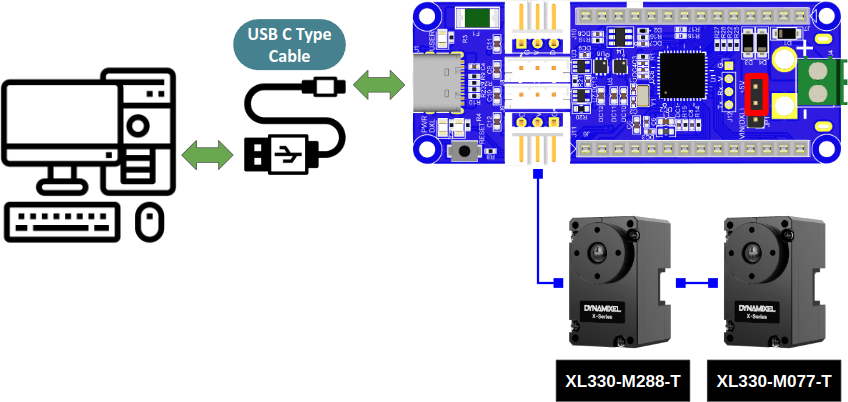
USB 전원공급 연결 예시
SMPS 전원공급 연결 예시
OpenCR1.0
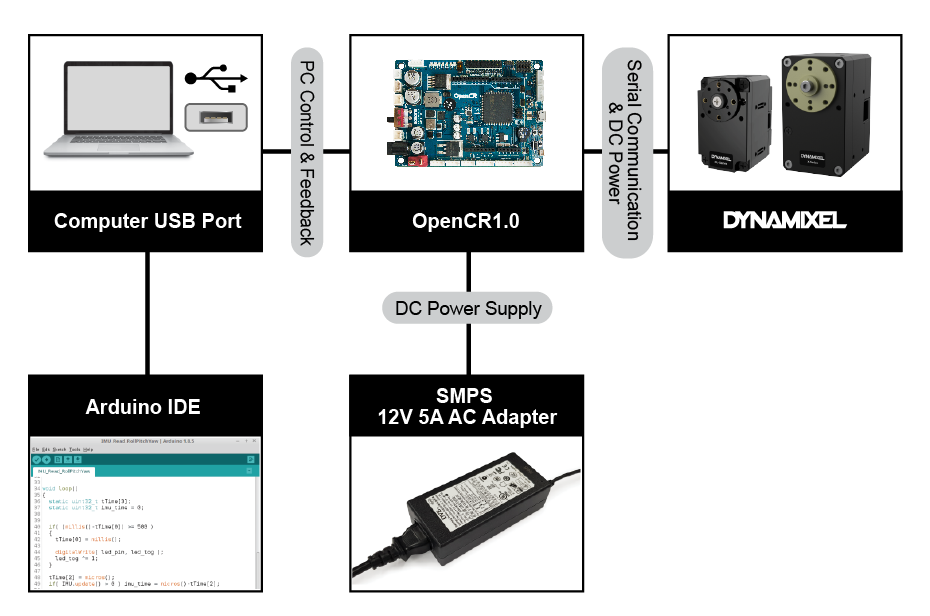
OpenCR 1.0은 ARM Cortex-M7 및 IMU 센서 / 다양한 포트가 내장된 사용한 강력한 성능의 오픈소스 로봇 제어기입니다.
PCB Gerber, BOM, 펌웨어 및 소스 코드 등 개발에 필요한 자료가 공개되어있으며, 아두이노 환경에서 다이나믹셀 SDK와 전용 아두이노 라이브러리를 사용하여 다이나믹셀을 제어합니다.
ROS 공식 플랫폼인 TurtleBot3의 제어기로 사용되었습니다.
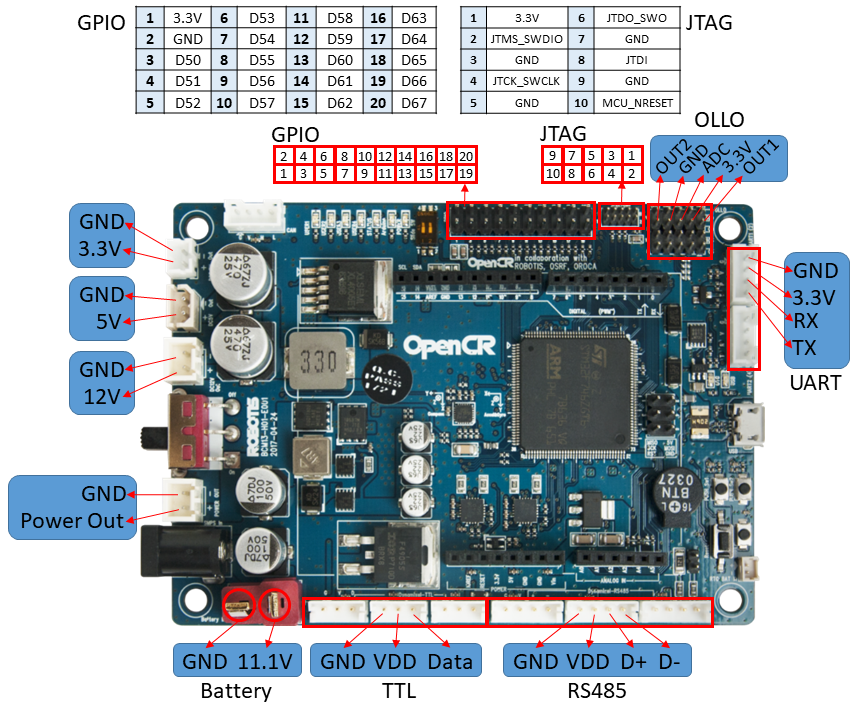
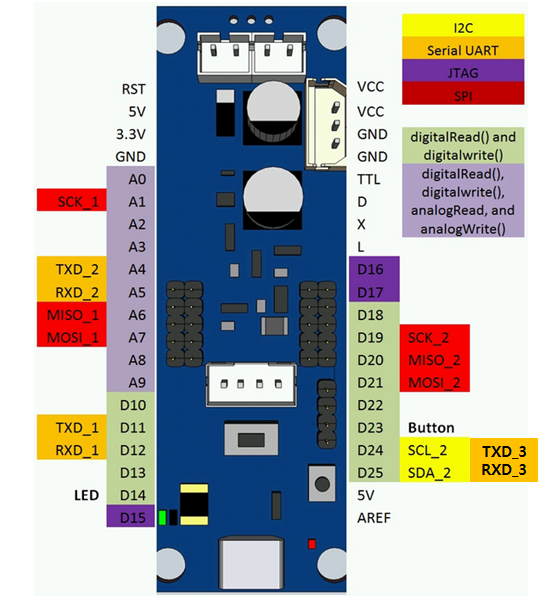
OpenCR 1.0 핀맵 및 레이아웃
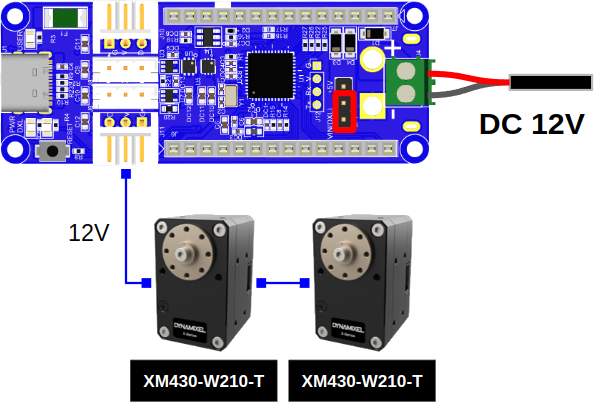
OpenCR 1.0 연결 예시
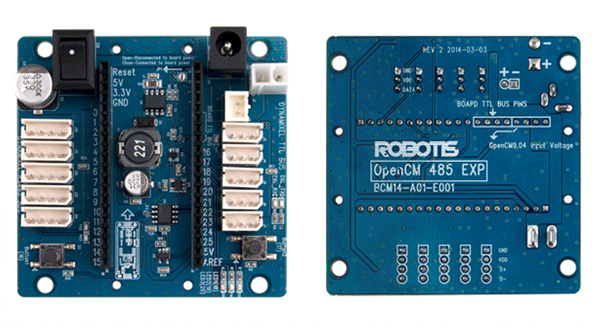
OpenCM9.04
OpenCM9.04은 ARM Cortex-M3을 사용한 제어기입니다. 아두이노 환경에서, 다이나믹셀 SDK와 전용 아두이노 라이브러리를 사용할 수 있습니다.
참고: OpenCM485 확장 보드를 사용하여, TTL 및 RS-485 다이나믹셀까지 폭넓게 사용 가능합니다.
교육용
CM 시리즈
교육용 키트에서 사용되는 CM 시리즈는 전용 [교육용 소프트웨어]를 지원하는, 고성능 레벨의 교육용 임베디드 제어기입니다.
CM 시리즈는 로보티즈가 제공하는 전용 센서를 사용할 수 있도록 올로 포트를 제공하며, 교육용 소프트웨어를 통해 쉽게 센서의 값을 읽고 제어할 수 있습니다.
CM시리즈와 다이나믹셀 연결 예시
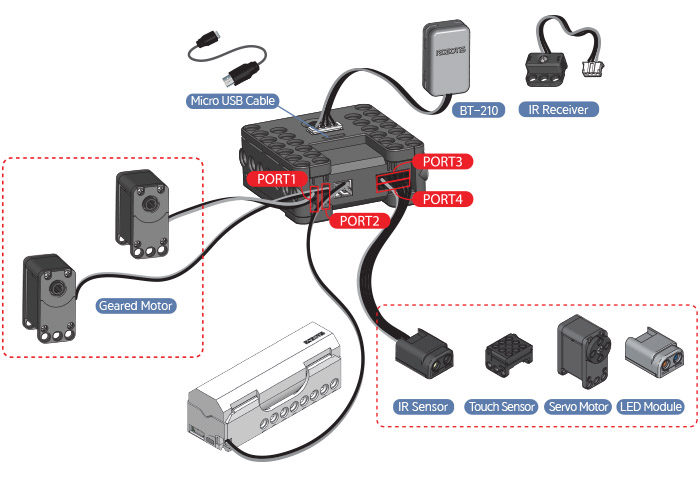
CM-150의 올로 포트를 사용한 센서 연결 예시
다음 제어기들은, 로보티즈에서 사랑받는 교육용 제어기입니다. 제공된 링크에서 자세한 내용을 확인하세요.
참고: 더 많은 교육용 제어기는 제어기 페이지에서 확인하세요.
참고: 제공되는 모든 센서가 CM시리즈와 호환되는것은 아닙니다. 부품 호환표를 참고하여, 호환되는 센서와 제어기를 확인하세요.
기타 제어기
로보티즈는 다이나믹셀 시스템과 교육용 키트에서 사용되는 다양한 제어기를 제공하고 있습니다. 자세한 내용은, 제어기 페이지를 참고하세요.
소프트웨어와 도구
다이나믹셀 제어를 위해, 제어기와 호환되는 적절한 소프트웨어를 사용해야 합니다.
선택한 제어기에 따라, 적절한 다이나믹셀 테스트 및 관리 도구 / 개발 도구 / 교육용 소프트웨어를 선택하세요.
소프트웨어 호환표를 참고하여, 선택한 소프트웨어가 제어기와 호환되는지 확인할 수 있습니다.
테스트 및 관리 도구
DYNAMIXEL Wizard 2.0
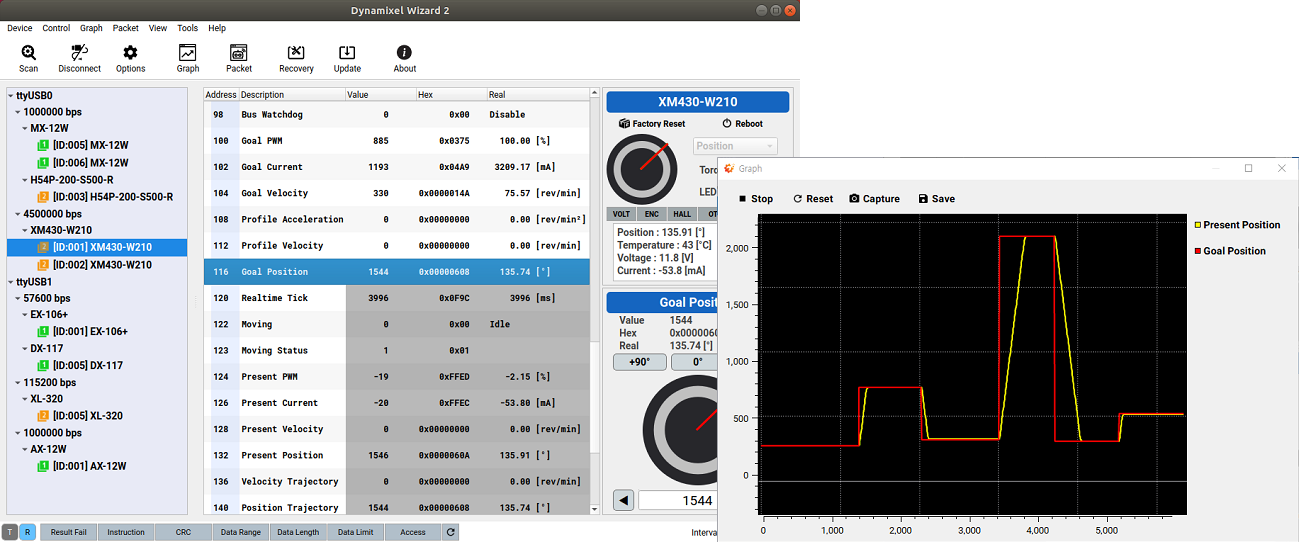
다이나믹셀 위자드 2.0은 다양한 OS(Linux / Mac / Windows)에서 사용 가능한 다이나믹셀에 최적화된 관리 도구입니다. (U2D2 또는 호환 제어기 필요)
DYNAMIXEL Wizard 2.0은 다음 특징이 있습니다.
- 다이나믹셀 펌웨어 업데이트
- 다이나믹셀 자가진단
- 다이나믹셀 설정 및 테스트
- 실시간 데이터 플로팅 모니터링 (그래프)
- 패킷 송/수신 및 모니터링
R+ Manager 2.0
R+ Manager 2.0은 로보플러스 소프트웨어 중 하나입니다.
R+Manager 2.0은 CM 시리즈 및 교육용 키트에서 제공되는 CM 시리즈의 유지보수(펌웨어 복구 및 업데이트) 및 CM 시리즈에 연결된 다이나믹셀의 테스트를 위해서 사용될 수 있습니다.
참고: 교육용 키트 또는 CM시리즈 사용자가 아니라면, 다이나믹셀 전용 관리프로그램 다이나믹셀 위자드 2.0을 사용하세요.
개발 도구
다이나믹셀 SDK
다이나믹셀 SDK는 주요 OS(Windows, Mac, Linux)에서, 다양한 개발언어(C, C++, C#, Python, Java, Matlab and LabVIEW)를 지원하는 개발 키트 라이브러리입니다.
제공되는 API를 사용하여, 다이나믹셀의 데이터에 쉽게 접근하여 데이터를 쓰고 읽을 수 있습니다.
참고: 다이나믹셀에 읽고 쓰기 위해서는, 디바이스의 출력 신호 (USB 또는 UART)를 다이나믹셀 통신 프로토콜인 TTL 및 RS-485 통신 회로를 구성하여 신호를 변환해야 합니다. 다이나믹셀 SDK를 PC 및 SBC 환경에서 사용한다면, 통신 변환 인터페이스인 U2D2사용이 권장됩니다. 다이나믹셀의 통신 회로는 통신을 참고하세요.
다이나믹셀 SDK (Arduino)
임베디드 제어기는 Arduino IDE에서 다이나믹셀 SDK를 사용 할 수 있습니다.
참고: 아두이노 IDE에서 높은 수준의 개발 언어 사용이 필요하지 않다면, 직관적인 API를 제공하는 Dynamixel2Arduino 라이브러리 사용이 권장됩니다.
아두이노 라이브러리
로보티즈는 아두이노 환경에서 다이나믹셀 시스템 개발을 위한 라이브러리와 함께 다양한 예제를 제공합니다.
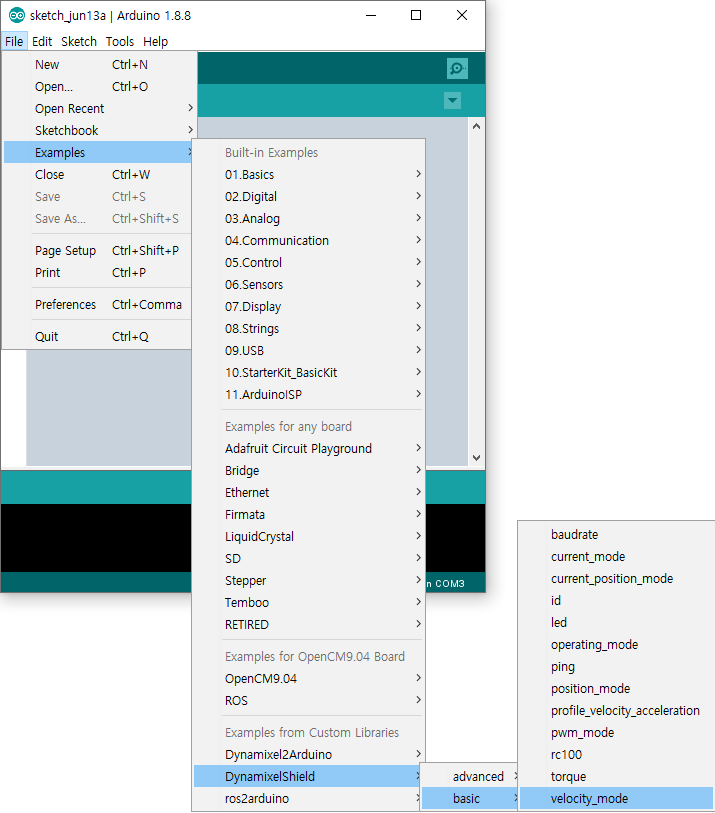
DynamixelShield Library: 제공 예제
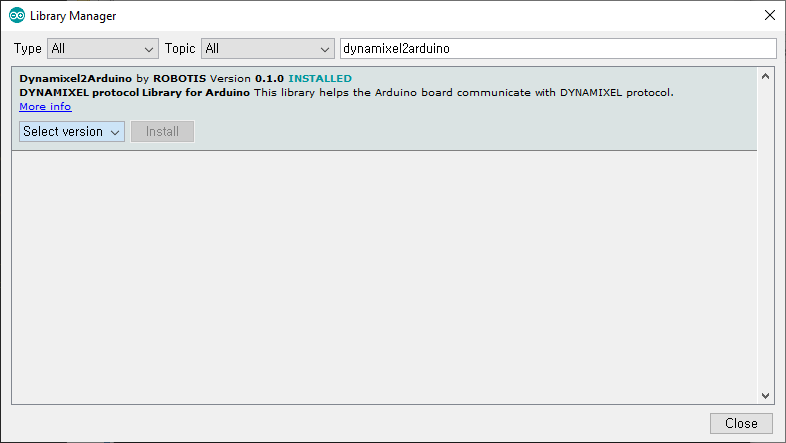
Dynamixel2Arduino
Dynamixel2Arduino는 다이나믹셀 SDK를 기반으로 설계된 라이브러리입니다. 유저 친화적인 API를 제공하며, 다이나믹셀 SDK보다 쉬운 코드 환경 제공합니다.
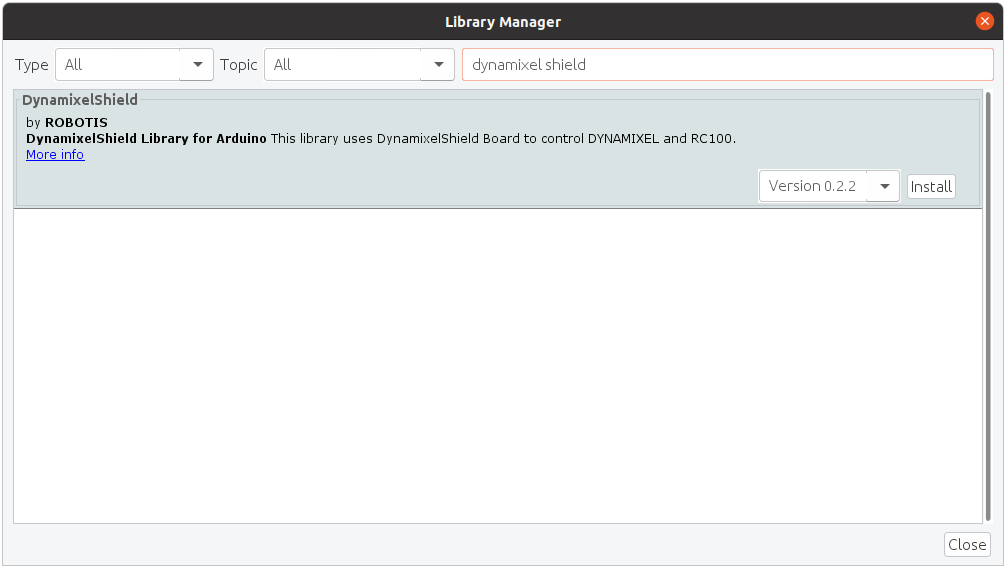
DynamixelShield
DynamixelShield 라이브러리는 Dynamixel2Arduino의 기능을 상속받은 다이나믹셀 쉴드 전용 라이브러리입니다.
교육용 소프트웨어
교육용 소프트웨어는, 교육용 키트와 CM 시리즈와 호환되는 전용 소프트웨어입니다.
- 태스크와 모션 프로그래밍 도구는 교육용 키트에서 사용되는 기본 예제를 제공합니다.
- CM 시리즈의 관리 및 테스트를 위한, 전용 관리 도구 R+ Manager 2.0를 사용할 수 있습니다.
로보플러스
CM 시리즈와 교육용 키트에서 사용할 수 있는 소프트웨어인, R+ (로보플러스)는 유저 친화적 프로그래밍 환경을 지원합니다. 더 많은 정보는 로보플러스를 참고하세요.
R+Task 3.0