개요
주요 사양
| 항목 | 설명 |
|---|---|
| 입력전압 | 5 ~ 30V |
| 전원 | SMPS, LiPo, DXL PRO 24V |
| 전원 스위치 | 1 |
| 다이나믹셀 포트 | 4Pin x 5, 3Pin x 5 |
| 버튼 | 2 |
| LED | 5 |
| 크기 | 68 mm X 66.5 mm |
| 무게 | 32g |
| Serial3 TX | 헤더 핀 #24 |
| Serial3 RX | 헤더 핀 #25 |
| 통신방향 제어 | 헤더 핀 #22 |
![]()
위험
(심각한 상해 또는 사망에 이르게 할 수 있습니다.)
- 제품 주위에 가연성 물질, 계면활성제, 음료수, 물을 분사하거나 흡입시키지 마세요.
- 작동 중인 제품에 손, 발과 같은 신체 또는 신체의 일부를 넣지 마세요.
- 제품에서 이상한 냄새가 나거나, 연기가 발생하면 전원 연결을 즉시 끊어주세요.
- 아이들이 제품으로 장난치지 않도록 하세요.
- 전원공급 시 극성을 반드시 확인해 주세요.
![]()
경고
(상해나 제품 손상의 원인이 됩니다.)
- 제품의 사용 환경을 준수하세요. (전압, 온도 등)
- 작동 중인 제품 내부로 칼날, 압정, 불씨 등을 흡입시키지 마세요.
![]()
주의
(상해나 제품 손상의 원인이 됩니다.)
- 제품을 사용자 임의로 분해 또는 개조하지 마세요.
- 제품에 강한 충격을 가하거나 떨어드리지 마세요.
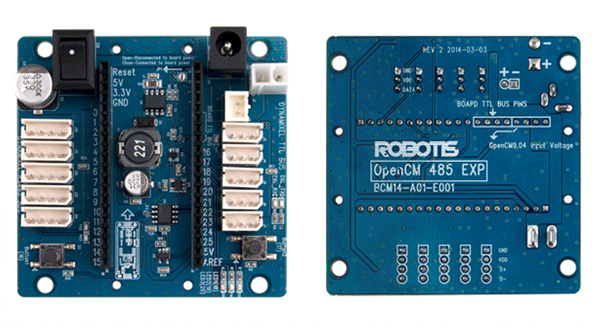
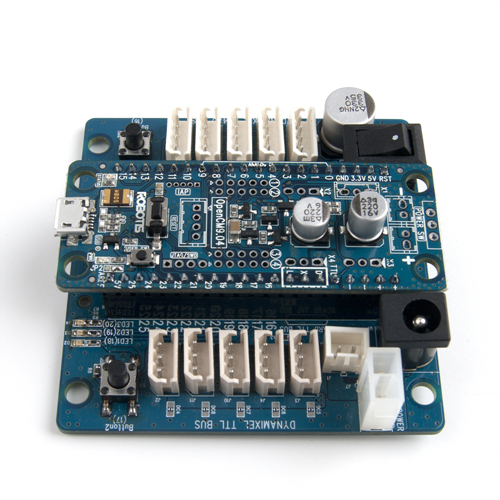
각 부 명칭
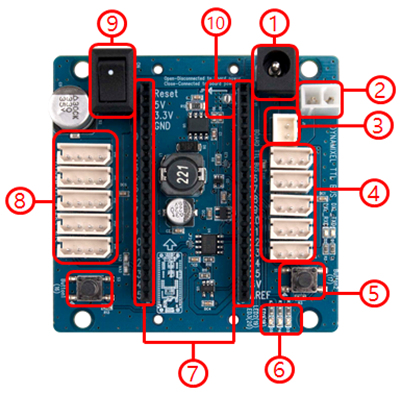
- SMPS DC Adapter (2.5mm 내경 / 5.5mm 외경, Center Positive) : SMPS DC Adapter를 연결해 OpenCM 485 확장보드 보드에 전원을 인가합니다.
- DXL PRO Power : 다이나믹셀 프로와 동일한 24V 전원 커넥터로 전원을 인가합니다.
- Li-Po battery : 11.1V Li-Po battery(LBS-10)를 사용하는 커넥터 입니다.
- 다이나믹셀 TTL 3 PIN : 3핀 케이블(다이나믹셀 TTL Bus)을 사용하는 다이나믹셀을 Daisy chain으로 연결하기 위한 포트 입니다.
- User Button : 사용자가 제어 할 수 있는 스위치 입니다.
- User LED : 사용자가 제어 할 수있는 LED 입니다.
- I/O header : OpenCM9.04와 연결하기 위한 헤더 입니다.(2.54mm pitch)
- 다이나믹셀 485 4 PIN : 4핀 케이블(다이나믹셀 485 Bus)을 사용하는 다이나믹셀을 Daisy chain으로 연결하기 위한 포트 입니다.
- Power Switch : 보드와 다이나믹셀 전원을 on/off하는 스위치 입니다. 단, USB 연결시 보드 전원은 on/off되지 않습니다.
- JP1 Jumper : OpenCM 485 EXP 보드에 입력된 전압을 OpenCM9.04에도 전압을 입력할지 결정하는 점퍼 입니다.
- 커넥터 정보 확인하기
주의: 커넥터 제조사의 PIN 순서와 상이할 수 있습니다. 사용자의 안전을 보호하고, 재산상의 손해를 막기위해, 반드시 PIN 순서를 확인하세요.
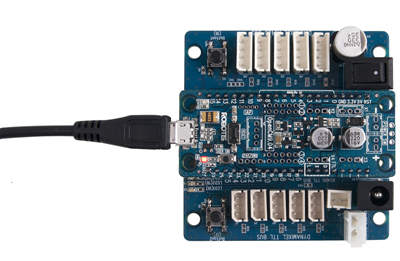
OpenCM9.04와 사용하기
OpenCM9.04 연결하기
-
OpenCM 485 확장보드 와 OpenCM9.04를 준비합니다. OpenCM9.04는 타입에 관계없이 사용가능하고 헤더를 납땜해주세요.
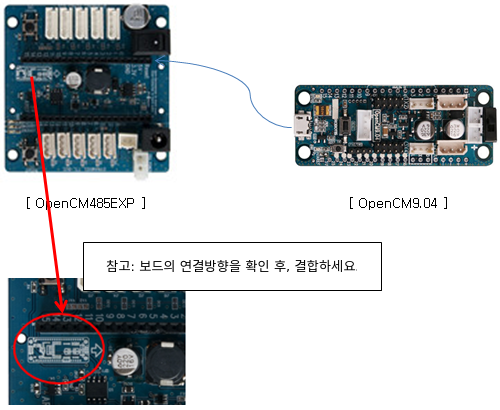
-
OpenCM 485 확장보드 와 OpenCM9.04를 아래의 그림과 같이 연결 합니다.
주의 : 방향을 위와 같이 연결 해주시기 바랍니다.
-
OpenCM9.04에 USB Cable를 연결 합니다.
-
다이나믹셀과 SMPS를 연결 합니다.

참고:
다양한 X시리즈 사용하기
DYNAMIXEL Channel을 설정하여, 다이나믹셀-X를 로보티즈가 제공하는 소프트웨어 (R+ Task, R+ Motion 및 R+ Manager)에서 사용하실수 있습니다.
참고: 아두이노 IDE를 사용시, 채널 설정이 필요하지 않습니다.
참고: 다이나믹셀-X 및 P 모델은 JST 커넥터를 사용합니다. OpenCM485 확장보드 사용시, JST-Molex 변환케이블(로봇 케이블-X3P 또는 로봇 케이블-X4P)을 사용하세요.
DYNAMIXEL Channel 설정하기
제어기에서 컨트롤 테이블의 Dynamixel Channel 항목을 변경하여, 다양한 X시리즈를 사용해보세요.
참고:
- OpenCM 9.04의 펌웨어를 최신으로 유지해주세요.
- OpenCM 485 확장보드와 OpenCM9.04가 결합되어있는 경우, 펌웨어 복구 및 업데이트를 진행 시 분리해주세요.
-
R+ Manager를 실행 후, 홈 탭에서 OpenCM 9.04를 선택하세요.

-
업데이트 & 테스트를 클릭하세요.

-
컨트롤 테이블이 활성화 되면, 16번 Dynamixel Channel 주소에서 원하는 항목으로 변경 후 저장하세요. 예를 들어, 확장 보드에서 다이나믹셀 X시리즈를 사용하기 위해서는 EXP Board(X-Series) 을 선택 합니다.

| 항목 | 설명 |
|---|---|
| On Board(XL-320) | OpenCM 9.04에서 XL-320을 사용 할수 있습니다. |
| EXP Board(X-Series) | OpenCM485 확장보드에서 X시리즈를 사용 할수 있습니다 (XL-320 제외). |
| EXP Board(XL-320) | OpenCM485 확장보드에서 XL320을 사용 할수 있습니다. |
| On Board(X-Series) | OpenCM 9.04에서 X시리즈를 사용 할수 있습니다 (XL-320 제외). |
참고: 설정이 완료 되면, 제어기 연결을 해제하고, OpenCM9.04 또는 485 확장보드의 전원을 끄고 다시 켜주세요. 제어기가 재부팅되고, 변경한 Dynamixel Channel에 맞게 다이나믹셀 Bus가 활성화 됩니다. 이후, 태스크 프로그램에서 모션파일을 사용하거나, 모션 프로그램에서 다이나믹셀을 사용 할 수 있습니다.
참고자료
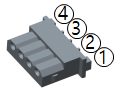
커넥터 정보
| 항목 | TTL | RS-485 | Power |
|---|---|---|---|
| 핀 번호 | 1 GND2 VDD3 DATA |
1 GND2 VDD3 DATA+4 DATA- |
1 GND2 VDD |
| 다이어그램 |  |
 |
 |
| 하우징 | 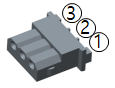 MOLEX 50-37-5033 |
 MOLEX 50-37-5043 |
 MOLEX 39-01-2020 |
| PCB 헤더 |  MOLEX 22-03-5035 |
 MOLEX 22-03-5045 |
 MOLEX 39-28-1023 |
| Crimp 터미널 | MOLEX 08-70-1039 | MOLEX 08-70-1039 | MOLEX 39-00-0038 |
| 다이나믹셀 전선규격 | 21 AWG | 21 AWG | 20 AWG |
주의: 커넥터 제조사의 PIN 순서와 상이할 수 있습니다. 사용자의 안전을 보호하고, 재산상의 손해를 막기위해, 반드시 PIN 순서를 확인하세요.
전원 연결 회로
OpenCM 485 확장보드 와 OpenCM9.04 연결시 전원 블록 다이어그램
OpenCM 485 확장보드는 전원에 연결됐을 때 OpenCM9.04에 5V 전원을 공급하며, JP1을 이용해서 OpeCM 485 확장보드에서 VDD전원을 OpenCM9.04로 공급할 것인지 선택합니다.
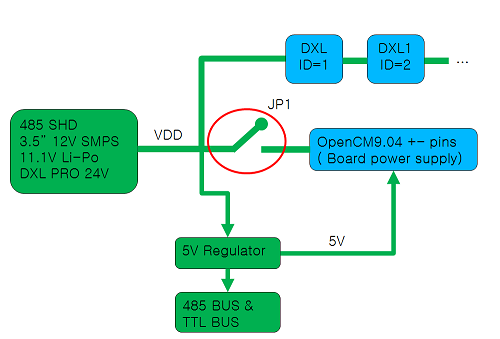
OpenCM 485 EXP 전원 연결도
OpenCM 485 확장보드의 TTL/485 버스는 OpenCM9.04의 USART3(Serial3)을 통해서 다이나믹셀 버스가 구성됩니다.
참고: OpenCM9.04의 다이나믹셀 TTL BUS는 USART1(Serial1)과 연결되어 있습니다.
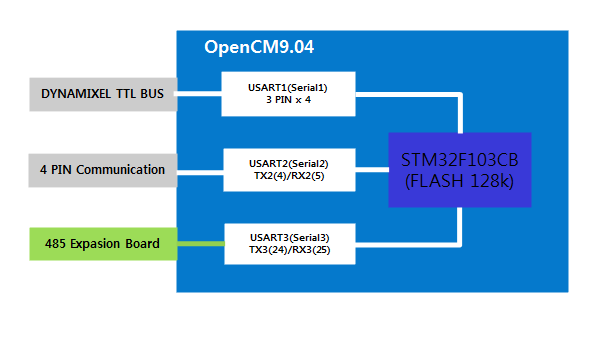
OpenCM9.04 & OpenCM 485 확장보드 버스 연결도
OpenCM 485 확장보드 프로그래밍
OpenCM 485 확장보드를 OpenCM9.04와 연결해서 사용하기 위해서는 아두이노 IDE를 사용해야 합니다.
-
OpenCM 485 확장보드의 485 Bus는 OpenCM9.04에서 Serial3(USART3)를 통해서 패킷을 주고 받습니다.
- 다이나믹셀 SDK를 사용해서 프로그래밍 하는 경우 아래와 같이 Serial3를 사용하도록 설정해야 합니다.
#include <DynamixelSDK.h> #define DEVICENAME "3" //Serial3 포트 사용 dynamixel::PortHandler *portHandler = dynamixel::PortHandler::getPortHandler(DEVICENAME); portHandler->openPort();- 다이나믹셀 워크벤치를 사용해서 프로그래밍 하는 경우 아래와 같이 Serial3를 사용하도록 설정합니다.
#include <DynamixelWorkbench.h> #define DEVICENAME "3" //Serial3 포트 사용 #define BAUDRATE 57600 DynamixelWorkbench dxl_wb; dxl_wb.begin(DEVICE_NAME, BAUDRATE);
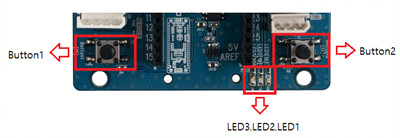
버튼 및 LED 활용
OpenCM 485 확장보드에는 OpenCM9.04의 IO핀과 연결된 버튼 2개와 LED 3개가 제공됩니다. 각 버튼 및 LED와 연결된 OpenCM9.04의 IO 핀번호는 아래의 표에서 확인할 수 있습니다.
| OpenCM9.04 I/O | |
|---|---|
| Button1 | 16 |
| Button2 | 17 |
| LED1 | 18 |
| LED2 | 19 |
| LED3 | 20 |