
Edit on GitHub
개요
서보 모터 SM-10
- 로보티즈 IoT 및 ROBOTIS SMART교육키트등에 사용되는 모터입니다.
- 제어기에 포트 제어를 통해 동작을 제어할 수 있습니다.
- “회전 모드” 로 설정하면 감속모터와 동일하게 동작시킬 수 있으며, “관절 모드” 로 설정하면 회전 속도(힘)와 위치값 지정을 통해 모터를 지정된 위치까지 움직이도록 할 수 있습니다.
- 관절을 움직이거나 조향장치를 움직이는 등 조건에 따라 특정한 각도를 유지해야 하는 곳에 주로 사용합니다.
-
SM-10 서보모터와 제어기를 사용하기위해 아래의 제어기 호환표를 참조해주세요.
제품 호환 가이드제어기 호환표
제품 사양
- 무게 : 16g
- 크기 : 18mm x 36mm x 27mm (with horn)
- 기어비 : 194:1
- 속력 : 85 RPM(at 3.0V)
- 특징
- 위치센서(POT)
- 안전장치(클러치) 장착
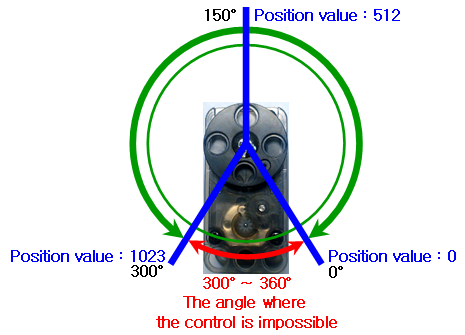
제어각
- SM-10 서보 모터는 0° ~ 300° 까지 위치를 제어할 수 있으며, 최소 제어각은 약 0.29° (300°/1024) 입니다.
- 하지만 다이나믹셀에 비해 정밀하지 못하고, 출력(토크)이 약하기 때문에, 서보모터의 원리와 사용법에 대한 기본적인 학습을 위한 용도로 사용되는 것이 알맞으며, 정밀한 제어를 필요로 하는 곳에 사용하기에는 적합하지 않습니다.
핀 배열
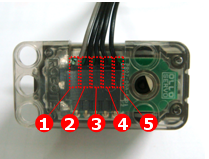
- MOT-
- GND
- ADC : 모터의 현재 위치를 아날로그 신호로 출력
- VCC
- MOT+
참고: 케이블을 잘못된 방향이나 무리한 힘으로 끼우거나 빼면 커넥터가 파손될 수 있으니 주의해주세요.
사용 방법
- 로보플러스 태스크 1.0- 서보모터 참조
- 사용 가능한 어드레스 목록
- 동작모드
- 속도
- 위치