
개요
- 스마트에서 사용되는 제어기로, 스마트의 각종 부품들(감속모터, 서보모터, 접촉센서, LED모듈, 적외선센서 등..)을 연결할 수 있습니다.
- R+ Manager 2.0 를 통해 펌웨어 복구를 할 수 있습니다.
- 로보플러스 태스크, R+ Task 2.0 및 R+ Task 3.0 또는 모바일 전용 R+ m.Task(1.1.2 이상 버전)를 통해 제어용 태스크 코드를 작성하여 각 부품들의 동작을 제어할 수 있습니다.
제품 사양
| 항목 | 사양 |
|---|---|
| 무게 | 25g |
| 컨트롤러 | STM32L151C8 |
| 크기 | 54mm x 42mm x 18mm |
| 동작 전압 | 4.8V ~ 8.4V(권장: 6.0 ~ 7.4V) (AA 건전지 x 4 또는 리튬이온 배터리 x 2) |
| 소비 전류 | 대기 상태: 80mA 실행 상태: 150mA 최대 한계: 300mA |
| 동작 온도 | -5°C ~ 70°C |
| 내부 I/O장치 | 적외선 센서(거리 감지용) x 3 마이크(소리 감지용) x 1 버저(Buzzer) x 1 외부 I/O 장치 4핀 통신 포트(무선 조종 및 다운로드용) x 1 모터 연결 포트(감속 모터용) x 2 다목적 포트(센서 및 출력용) x 8 |
![]()
위험
(심각한 상해 또는 사망에 이르게 할 수 있습니다.)
- 제품 주위에 가연성 물질, 계면활성제, 음료수, 물을 분사하거나 흡입시키지 마세요.
- 작동 중인 제품에 손, 발과 같은 신체 또는 신체의 일부를 넣지 마세요.
- 제품에서 이상한 냄새가 나거나, 연기가 발생하면 전원 연결을 즉시 끊어주세요.
- 아이들이 제품으로 장난치지 않도록 하세요.
- 전원공급 시 극성을 반드시 확인해 주세요.
![]()
경고
(상해나 제품 손상의 원인이 됩니다.)
- 제품의 사용 환경을 준수하세요. (전압, 온도 등)
- 작동 중인 제품 내부로 칼날, 압정, 불씨 등을 흡입시키지 마세요.
![]()
주의
(상해나 제품 손상의 원인이 됩니다.)
- 제품을 사용자 임의로 분해 또는 개조하지 마세요.
- 제품에 강한 충격을 가하거나 떨어드리지 마세요.
컨트롤 테이블
컨트롤 테이블은 제어기 내부에 존재하는 데이터의 집합체입니다. 사용자는 컨트롤 테이블의 주소를 이용하여 해당 주소에 저장된 데이터를 읽어오거나 새로운 데이터를 입력할 수 있습니다.
영역(EEPROM, RAM)
컨트롤 테이블은 2개의 영역으로 구분됩니다. RAM 영역에 위치한 데이터는 전원이 인가될 때마다 다시 기본값으로 설정됩니다(Volatile). 반면 EEPROM 영역에 위치한 데이터는 값을 변경하면 전원이 꺼져도 그 값이 보존됩니다(Non-Volatile).
접근속성(R, RW)
컨트롤 테이블의 데이터에는 2개의 접근 속성이 있습니다. ‘RW’는 읽기와 쓰기 접근이 모두 가능합니다. 반면 ‘R’은 읽기 전용(Read Only) 속성을 갖습니다. 읽기 전용 속성의 데이터는 사용자가 임의로 값을 바꿀 수 없기 때문에 주로 측정 또는 모니터링 용도로 사용되고, 읽기쓰기 속성(‘RW’)은 제어 용도로 사용됩니다.
기본값
제어기에 전원이 인가될 때 컨트롤 테이블의 각 데이터는 기본값으로 설정됩니다. 사용자가 기본값을 변경하면 새로운 기본값이 적용됩니다. RAM 영역의 기본값은 전원이 인가되었을 때 설정되는 값입니다.
크기
데이터의 크기는 용도에 따라 1, 2, 4[byte]로 정해져 있습니다. Instruction Packet을 통해 데이터를 변경할 때는 해당 데이터의 크기를 확인하시기 바랍니다.
EEPROM 영역
| 주소 | 크기[byte] | 항목 | 설명 | 접근속성 | 기본값 |
|---|---|---|---|---|---|
| 0 | 2 | Model Number | 모델 번호 | R | 400 |
| 6 | 1 | Firmware Version | 펌웨어 버전 정보 | R | - |
| 7 | 1 | ID | 제어기 ID | RW | 200 |
| 8 | 1 | Baud Rate | 제어기 통신속도 | R | 1 |
| 9 | 1 | Return Delay Time | 응답 지연 시간 | RW | 0 |
| 10 | 1 | Status Return Level | 응답 레벨 | RW | 2 |
RAM 영역
| 주소 | 크기[byte] | 항목 | 설명 | 접근속성 | 기본값 |
|---|---|---|---|---|---|
| 21 | 1 | Mode Number | 현재 모드 번호 | RW | - |
| 25 | 1 | Press Counter | 시작버튼 눌림 횟수 | R | - |
| 26 | 1 | Button Status | 사용자버튼 상태 | R | 0 |
| 30 | 2 | My Zigbee ID | 나의 무선모듈 ID | R | - |
| 32 | 2 | Your Zigbee ID | 상대 무선모듈 ID | RW | - |
| 36 | 1 | IR Communication Channel | 적외선(수신기) 통신 채널 번호 | RW | 1 |
| 66 | 2 | Motion Play Page | 모션 실행 페이지 번호 | RW | 0 |
| 68 | 1 | Motion Play Status | 모션 실행 상태 | R | - |
| 73 | 1 | 128ms Timer Value | 128ms 타이머 값 | RW | 0 |
| 74 | 2 | 1ms Timer Value | 1ms 타이머 값 | RW | 0 |
| 76 | 1 | Power Save Timer Value | 자동 꺼짐 타이머 값 | RW | 0 |
| 77 | 1 | Random Number | 임의의 숫자 | RW | - |
| 79 | 1 | AUX LED(RED) | 사용자 LED(RED) | RW | 0 |
| 84 | 1 | Buzzer Index | 부저 음계/멜로디 번호 | RW | 0 |
| 85 | 1 | Buzzer Time | 부저 재생 시간 | RW | 0 |
| 86 | 1 | Sound Detected Count | 최종 소리 감지 횟수 | R | 0 |
| 87 | 1 | Sound Detecting Count | 소리 감지 횟수 | R | 0 |
| 88 | 2 | Low Battery Sound Enable | 저전압 알람 스위치 | RW | 0 |
| 91 | 2 | Internal Right IR Sensor Value | 내장 우측 적외선센서 감지값 | R | - |
| 93 | 2 | Internal Left IR Sensor Value | 내장 좌측 적외선센서 감지값 | R | - |
| 95 | 2 | Internal Center IR Sensor Value | 내장 가운데 적외선센서 감지값 | R | - |
| 97 | 1 | Input Power Voltage (unit : 0.1V) | 입력전압(단위 : 0.1V) | R | - |
| 128 | 1 | Port 3 Servo Mode | 3번 포트 서보모터 모드 (바퀴/서보) | RW | - |
| 129 | 1 | Port 4 Servo Mode | 4번 포트 서보모터 모드 (바퀴/서보) | RW | - |
| 136 | 2 | Port 3 Motor Speed | 3번 서보모터 회전 속도 | RW | - |
| 138 | 2 | Port 4 Motor Speed | 4번 서보모터 회전 속도 | RW | - |
| 152 | 2 | Port 1 Motor Speed | 1번 감속모터 회전 속도 | RW | - |
| 154 | 2 | Port 2 Motor Speed | 2번 서보모터 회전 속도 | RW | - |
| 156 | 2 | Port 3 Servo Position | 3번 서보모터 위치 값 | RW | - |
| 158 | 2 | Port 4 Servo Position | 4번 서보모터 위치 값 | RW | - |
| 172 | 2 | Port 3 IR Sensor Value | 3번 포트 적외선 센서 값 | R | - |
| 174 | 2 | Port 4 IR Sensor Value | 4번 포트 적외선 센서 값 | R | - |
| 204 | 1 | Port 3 Touch Sensor Value | 3번 포트 터치 센서 값 | R | - |
| 205 | 1 | Port 4 Touch Sensor Value c | 4번 포트 터치 센서 값 | R | - |
| 212 | 1 | Port 3 LED Module Value | 3번 포트 LED모듈 제어 값 | RW | 0 |
| 213 | 1 | Port 4 LED Module Value | 4번 포트 LED모듈 제어 값 | RW | 0 |
| 220 | 2 | Port 3 User Device Value | 3번 포트의 사용자 장치 | RW | 0 |
| 222 | 2 | Port 4 User Device Value | 4번 포트의 사용자 장치 | RW | 0 |
| 236 | 1 | port 3 Temperature Sensor Value | 3번 포트 온도 센서 값 | R | - |
| 237 | 1 | Port 4 Temperature Sensor Value | 4번 포트 온도 센서 값 | R | - |
| 244 | 1 | Port 3 Ultrasonic Sensor Value | 3번 포트 초음파 센서 값 | R | - |
| 245 | 1 | Port 4 Ultrasonic Sensor Value | 4번 포트 초음파 센서 값 | R | - |
| 252 | 1 | Port 3 Magnetic Sensor Value | 3번 포트 자석 센서 값 | R | - |
| 253 | 1 | Port 4 Magnetic Sensor Value | 4번 포트 자석 센서 값 | R | - |
| 260 | 1 | Port 3 Motion Sensor Value | 3번 포트 동작 감지 센서 값 | R | - |
| 261 | 1 | Port 4 Motion Sensor Value | 4번 포트 동작 감지 센서 값 | R | - |
| 268 | 1 | Port 3 Color Sensor Value | 3번 포트 칼라 센서 값 | R | - |
| 269 | 1 | Port 4 Color Sensor Value | 4번 포트 칼라 센서 값 | R | - |
| 276 | 1 | Port 3 Hydro-Thermo Sensor Humidity Value | 3번 포트 온습도 센서 습도 값 | R | - |
| 277 | 1 | Port 4 Hydro-Thermo Sensor Humidity Value | 4번 포트 온습도 센서 습도 값 | R | - |
| 284 | 1 | Port 3 Hydro-Thermo Sensor Temperature Value | 3번 포트 온습도 센서 온도 값 | R | - |
| 285 | 1 | Port 4 Hydro-Thermo Sensor Temperature Value | 4번 포트 온습도 센서 온도 값 | R | - |
| 292 | 2 | Port 3 Brightness Sensor Value | 3번 포트 조도 센서 값 | R | - |
| 294 | 2 | Port 4 Brightness Sensor Value | 4번 포트 조도 센서 값 | R | - |
각 부 명칭
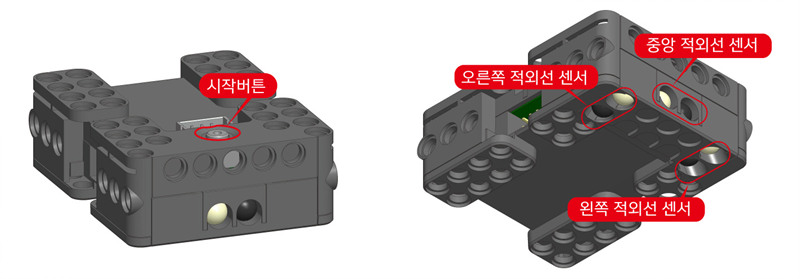
시작버튼 짧게 버튼을 눌러 켜면, 시작 버튼 좌측의 빨간색 전원 LED 에 불이 켜지며 제어기에 다운로드 한 프로그램이 실행됩니다.
적외선 센서 3개의 적외선 센서가 장착되어 있어 각 방향에서의 센서값을 이용하여 프로그래밍 할 수 있습니다.
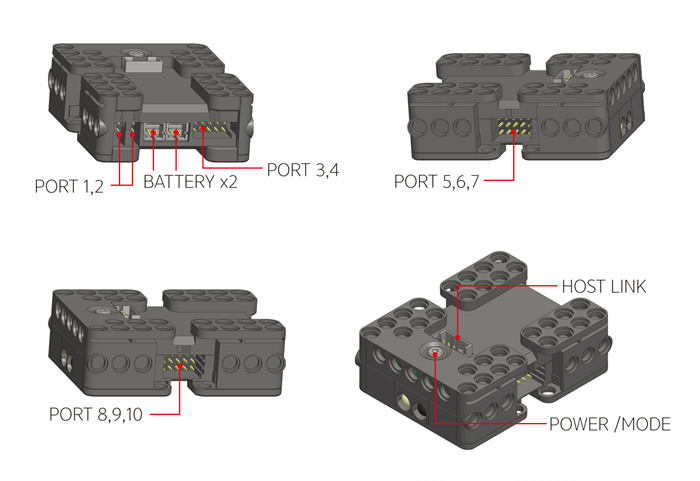
상단 4핀 포트(HOST LINK) 시작 버튼 옆에 위치해 있으며, USB 다운로더(LN-101), ZIG-110A, BT-110A, BT-210, BT-410 등을 연결할 수 있습니다.
포트 1 ~ 2 각 포트 번호는 I, II 와 같이 막대 숫자로 표시되어 있으며, 감속 모터를 연결하는 2핀으로 된 포트입니다.
포트 3 ~ 10 각 포트 번호는 III, IV 와 같이 막대 숫자로 표시되어 있으며, 적외선 센서와 접촉센서, 서보모터, LED 모듈 등을 연결할 수 있는 5핀으로 된 포트입니다.
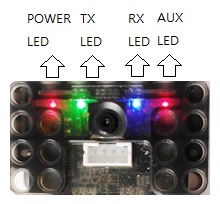
POWER LED (빨간색) 전원이 켜지면 POWER LED가 켜지고 전원이 꺼지면 꺼집니다.
TX LED (녹색) 제어기에서 4핀 포트를 통해서 외부로 데이터를 전송하는 동안 켜집니다.
RX LED (파란색) 외부에서 4핀 포트를 통해 제어기로 데이터를 전송하는 동안 켜집니다.
AUX LED (빨간색) 사용자가 ON/OFF를 제어할 수 있는 LED 입니다.
전원 연결
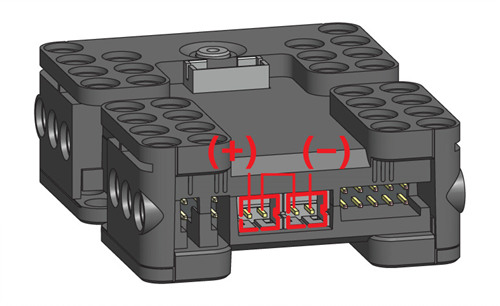
CM-200 은 ABB-030(건전지x2 박스) 2개 또는 LB-041(리튬이온 배터리) 두개를 사용하여 전원을 연결할 수 있습니다. 입력 가능한 전압의 범위는 4.8V ~ 8.4V 이며 권장 사용전압은 6 ~ 7.4V 입니다. 전원 포트의 극성은 위 그림과 같습니다. +부분에 전지의 +극을, -부분에 전지의 -극을 연결하면 됩니다.
작동 방법
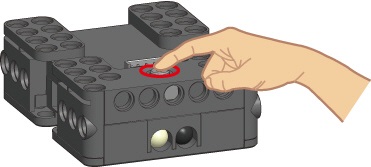
- 시작 버튼을 짧게 눌러 켜면, 시작 버튼 좌측의 빨간색 전원 LED에 불이 켜지며 제어기에 다운로드 한 프로그램이 실행됩니다.
- 처음 시작 시 연속으로 버튼을 누른 횟수에 따라 “시작 버튼 눌림 횟수”가 증가합니다. 따라서 이 파라미터를 사용하여 프로그래밍 하면 CM-200 을 작동시킬 때 시작 버튼을 누르는 횟수에 따라 각각 다른 행동을 하도록 할 수 있습니다. 프로그래밍은 이 문서의 고급 사용자 항목의 프로그래밍을 참조하십시오.
- 시작 버튼을 1초 이상 눌러 켜면 “삐삐” (2회) 소리가 나고 빨간색 전원LED 에 불이 켜지며 제어기가 켜지고 다운로드 된 프로그램이 실행되지 않는 manage 모드에 진입합니다.
- 시작 버튼을 5초 이상 눌러 켜면 “삐삐삐” (3회) 소리가 나고 펌웨어 복구 모드로 진입합니다.
- 제어기가 켜진 상태에서 다시 시작 버튼을 누르면 제어기가 꺼집니다.
미리 작성되어있는 코드를 CM-200 제어기에 다운로드 받아서 로봇을 움직여 볼 수 있습니다. 파일을 CM-200제어기에 다운로드하기 위해서는 R+ Smart와 R+ m.Task 앱의 설치가 필요합니다.
무선통신 연결하기
CM-200은 BT-210 / BT-110 / ZIG-110 / BT-410 을 사용하여 PC 및 스마트 디바이스에 원격으로 연결할수 있습니다.


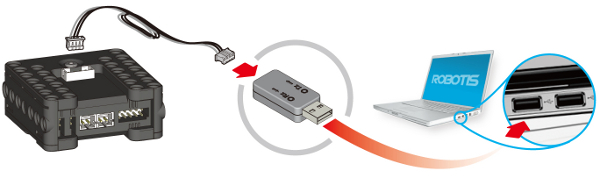
PC에 연결하기
CM-200을 PC에 연결하기위해서 LN-101을 사용하세요.
R+ SmartIII 설치하기
스마트 기기에 R+ SmartIII를 설치합니다.
- 구글 play 스토어에서 “로보티즈”를 검색합니다.
- R+ SmartIII (ROBOTIS)를 선택합니다.
- 설치
R+ m.Task 2.0 설치하기
스마트 기기에 R+ m.Task 2.0을 설치합니다. 예제 다운로드, 편집, 디버깅, 리모컨 기능을 제공합니다.
- 구글 play 스토어에서 “로보티즈”를 검색합니다.
- R+ m.Task2 (ROBOTIS)를 선택합니다.
- 설치
R+ m.Motion 2.0 설치하기
스마트 기기에 R+ m.Motion 2.0을 설치합니다.
- 구글 play 스토어에서 “로보티즈”를 검색합니다.
- R+ m.Motion 2.0 (ROBOTIS)를 선택합니다.
- 설치
모션파일 다운로드
R+ SmartIII로 모션파일 다운로드하기
참고: 아래는 R+ SmartIII 사용자를 위한 다운로드 방법입니다. PC에서 CM-200으로 모션 파일을 다운로드 받는다면, PC에서 모션파일 다운로드하기를 참고하세요.
참고: R+ SmartIII는에서 모션 다운로드시, R+ m.Motion 2.0이 필요합니다. R+ m.Motion 2.0 설치하기를 참고하세요.
로봇을 움직이는데 필요한 모션 파일을 다운로드합니다.
- R+ Smart 앱을 실행합니다.
- 작동하고자 하는 예제의 그림을 길게 터치합니다. (스마트3 앱에서는 예제그림 하단의
편집버튼을 선택합니다.) - 세부 메뉴 창에서 받고자 하는 모션 파일을 선택하면 자동으로 R+ m.Motion 앱이 실행됩니다.
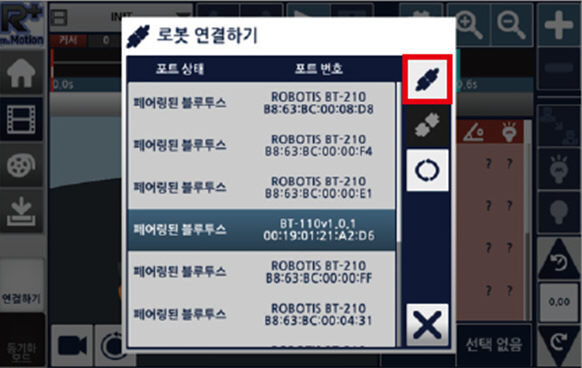
- 제어기의 전원을 켜고, 화면 왼쪽 아래에 있는
연결버튼을 터치하면 연결할 수 있는 장치의 목록이 나타납니다. - 목록에서 로봇에 연결된 블루투스(BT-210)을 선택하고
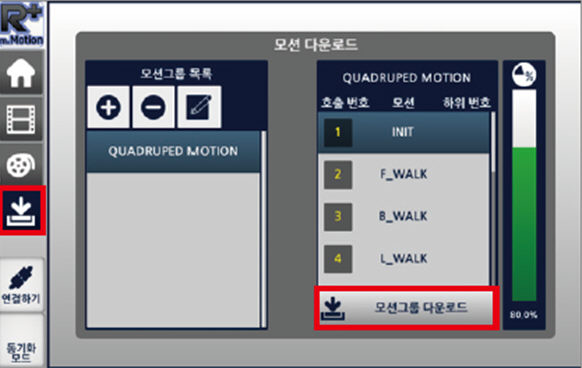
연결하기를 터치합니다. (스마트기기와 블루투스가 연결되어 있지 않으면 “장치 선택 창”이 열리므로 블루투스를 선택하여 연결하면 됩니다.) - 창이 사라지면 ‘모션 다운로드’ 탭을 선택하고, ‘모션그룹 다운로드’ 버튼을 터치합니다.

PC에서 모션파일 다운로드하기
CM-200은 R+ Motion, R+ Motion 2.0, R+ Task 3.0등 모든 모션 프로그램을 지원합니다.
각 매뉴얼에서, 모션 다운로드 방법을 참고하세요.
참고: PC 사용자를 위한 다운로드 방법입니다. R+ SmartIII 사용자는 R+ SmartIII로 모션파일 다운로드하기를 참고하세요.
참고: 프로그램 다운로드를 위해서, CM-200이 PC 또는 스마트폰에 원격 또는 케이블로 연결하세요.
태스크파일 다운로드
R+ SmartIII로 태스크파일 다운로드하기
참고: 아래는 R+ SmartIII 사용자를 위한 다운로드 방법입니다. PC에서 CM-200으로 모션 파일을 다운로드 받는다면, PC에서 모션파일 다운로드하기를 참고하세요.
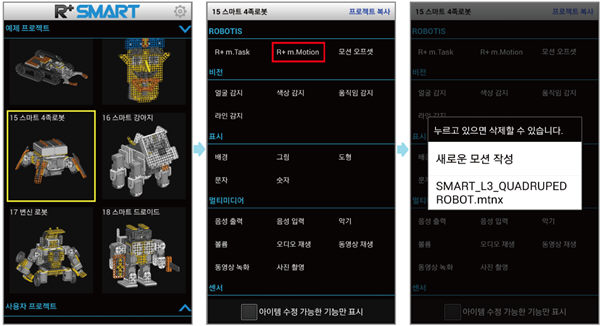
- R+ SMART 앱을 실행하고 작동하고자 하는 로봇예제 이미지를 길게 누른후 아이템 > R+m.Task 또는 R+m.Task2 를 선택합니다. (스마트3 앱에서는 예제 그림 하단의 편집 버튼을 선택합니다.)
- R+m.Task 또는 R+m.Task2를 선택하면 해당 로봇예제의 task 파일들이 확인됩니다. 이 중에서 다운받고자 하는 task 파일을 선택합니다.
-
정상적으로 실행되면 task 파일이 열립니다.
- 스마트기기의 메뉴를 누르고 “다운로드” 를 누르면 블루투스를 통해 무선으로 연결된 제어기에 task 파일이 다운로드 됩니다.
(이 때, 스마트기기와 블루투스가 연결되어 있지 않으면 “장치 선택 창” 이 열리므로 블루투스를 선택하여 연결해 주면 됩니다.) -
다운로드가 완료되면 다운로드가 완료되었다는 메시지가 나타납니다.

PC로 태스크파일 다운로드받기
태스크 파일을 PC 전용 프로그램으로 CM-200에 다운로드 하는 방법입니다.
CM-200은 R+ Task, R+ Task 2.0, R+ Task 3.0등 모든 태스크 프로그램을 지원합니다.
각 매뉴얼에서, 태스크 다운로드 방법을 참고하세요.
참고: PC 사용자를 위한 다운로드 방법입니다. R+ SmartIII 사용자는 R+ SmartIII로 태스크파일 다운로드하기를 참고하세요.
참고: 프로그램 다운로드를 위해서, CM-200을 원격 또는 케이블로 연결하세요.
펌웨어 복구
제어기가 정상동작하지 않는 경우 R+ Manager 2.0을 이용해서 제어기의 펌웨어를 복구할 수 있습니다.
참고자료
호환성
호환되는 소프트웨어
소프트웨어 호환표를 참고하세요.
호환되는 장치
- LN-101 다운로더
- IRSS-10 적외선 센서
- TS-10 터치 센서
- CS-10 컬러 센서
- MGSS-10 자석 센서
- PIR-10 동작 센서
- TPS-10 온도 센서
- TMS-10 온습도 센서
- CDS-10 조도 센서
- SM-10 서보모터
- GM-10A 감속모터
- 저속 감속모터
- LM-10 LED 모듈
- ZIG-110A
- BT-110A
- BT-210
- BT-410
- LB-041 리튬이온 배터리
- ABB-030 배터리 박스
참고: 부품 호환표
적용된 교육키트
- ROBOTIS SMART
- ROBOTIS SMART II
- ROBOTIS SMART III
인증 획득
표기되지 않은 인증에 대해서는 별도 문의하시기 바랍니다.
FCC
Note: This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is operated in a commercial environment. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the instruction manual, may cause harmful interference to radio communications. Operation of this equipment in a residential area is likely to cause harmful interference in which case the user will be required to correct the interference at his own expense.
WARNING
Any changes or modifications not expressly approved by the manufacturer could void the user’s authority to operate
the equipment.