
CM-900
개요
- CM-900은 32bit ARM Cortex-M3가 장착되어있으며, 회로도 및 소스코드가 공개된 로봇용 임베디드 보드입니다.
- TTL / RS-485 커넥터를 통해 ㈜로보티즈의 모든 다이나믹셀 시리즈가 지원되며, 블루투스/지그비 포트 또한 지원됩니다.
주의: CM-900 은 현재 단종되어 더 이상 판매되지 않습니다.
주요 사양
| 항목 | 사양 |
|---|---|
| CPU | STM32F103C8 (ARM Cortex-M3) |
| Operation Voltage | 5V~24V(USB 5V, DXL 12V, XL-Series 7.4V) |
| I/O | GPIO 32 |
| Timer | 4 (16bit) |
| Analog In(ADC) | 10 (12bit) |
| Flash | 64 Kbytes |
| SRAM | 20 Kbytes |
| Clock | 72Mhz |
| USB | 1 (2.0 FullSpeed) |
| CAN | 1 |
| USART | 3 |
| SPI | 2 |
| I2C(TWI) | 2 |
| Debug | JTAG & SWD |
| DMA | 7ch |
| 3 Pin TTL | 2 |
| 4 Pin RS485 | 2 |
| 3 Pin XL-Serise | 1 |
| Dimension | 60mm X 54 mm X 1.6 mm |
- USB전원으로는 다이나믹셀을 구동할 수 없습니다. 별도의 전원을 공급해주세요. (CM-900은 한군데이상만 전원이 공급되면 동작합니다.)
- 별도의 전원공급시 연결되는 주변장치의 동작전압을 확인해주세요. 다이나믹셀이나 XL-Series의 경우 입력된 전압이 그대로 공급됩니다.
- 다이나믹셀과 XL-Series는 동작전압차이가 있어 함께 사용할 수 없습니다.
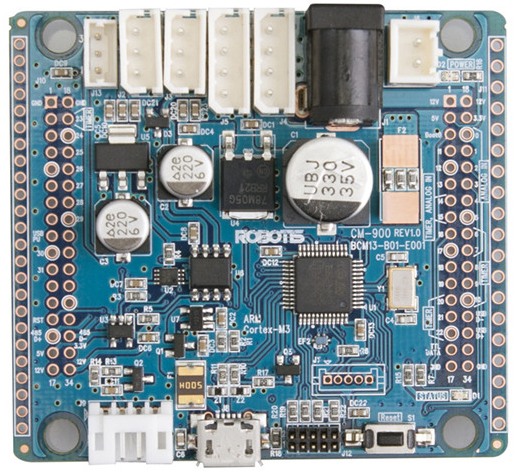
각 부 명칭
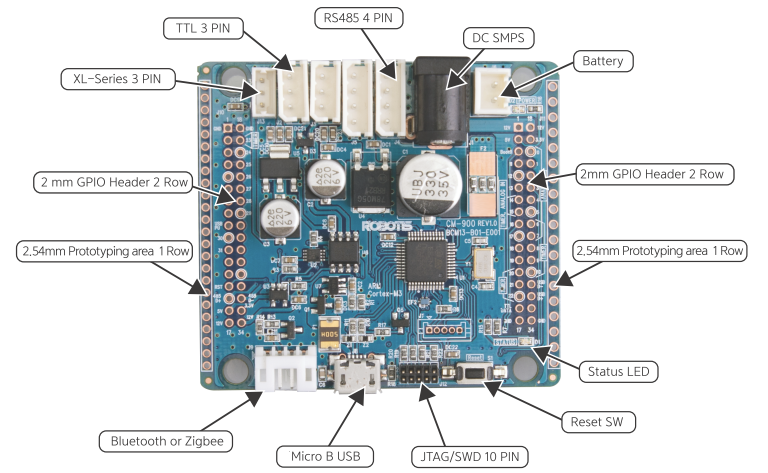
CM-900 각 부 명칭
- Micro B USB : CM-900을 다운로드 또는 PC와 같은 외부 장치와 USB 통신을 수행하며 동시에 5V 전원이 공급됩니다. 제공된 USB 케이블 또는 가지고 있는 일반 안드로이드 디바이스의 Micro B USB 케이블을 대용해서 사용할 수 있습니다.
- Reset SW : CM-900 CPU의 리셋을 수행합니다.
- BT-110/ZIG-110 4PIN : BT-110, BT-210, ZIG-110, LN-101 등과 같은 4핀 케이블을 연결해서 외부 장치와 시리얼(UART) 통신을 수행합니다. 단, LN-101은 펌웨어 다운로드가 아닌 오직 PC와 시리얼 통신만 수행합니다.
- 2mm/2.54 mm 만능기판 : CM-900의 양쪽 좌우로 각각 2mm 2.54mm Pitch의 만능기판이 장착되어 있어서 편리하게 사용자 응용 회로를 납땜 연결할 수 있습니다.
- 2 mm GPIO Header : CM-900의 CPU인 STM32F103C8의 모든 Pin들이 외부로 인터페이스 되어 있어서 자유롭게 활용 가능합니다.
- TTL 3 PIN : 3핀 케이블(TTL 통신)을 사용하는 다이나믹셀을 Daisy chain으로 연결하기 위한 포트 입니다.
- RS485 4 PIN : 4핀 케이블(RS-485 통신)을 사용하는 다이나믹셀을 Daisy chain 으로 연결하기 위한 포트입니다.
- 전원 LED : 전원이 ON 상태이면 켜지고 OFF 상태이면 꺼지는 LED 입니다.
- Status LED : CM-900에서 프로그래밍 확인을 위한 테스트 LED입니다. D16번 PIN을 통해HIGH/LOW를 주면 LED가 꺼지거나 켜집니다.
- 배터리 소켓 : 배터리를 연결하는 소켓입니다.
- DC SMPS : 12V SMPS를 연결하는 소켓입니다.
- XL-Series 3 PIN : 최신 다이나믹셀 시리즈의 TTL 3핀 커넥터 입니다.
- JTAG/SWD 10 PIN: JTAG/SWD 단자를 통해 IAR, Keil등의 다른 상용개발프로그램을 이용할 수 있습니다.
주의: 커넥터 제조사의 PIN 순서와 상이할 수 있습니다. 사용자의 안전을 보호하고, 재산상의 손해를 막기위해, 반드시 PIN 순서를 확인하세요.
CM-900 USB 드라이버 설치(Windows용)
Linux, Mac OS X는 드라이버를 설치할 필요가 없습니다. Windows 8은 시작설정 > 드라이버 서명 적용 사용 안 함 으로 재부팅하신 후 설치 진행해주세요.
-
CM-900을 Micro-B USB cable을 통해 PC와 연결하여 USB 드라이버 소트으웨어 설치 준비
-
ROBOTIS\divers 디렉토리를 선택
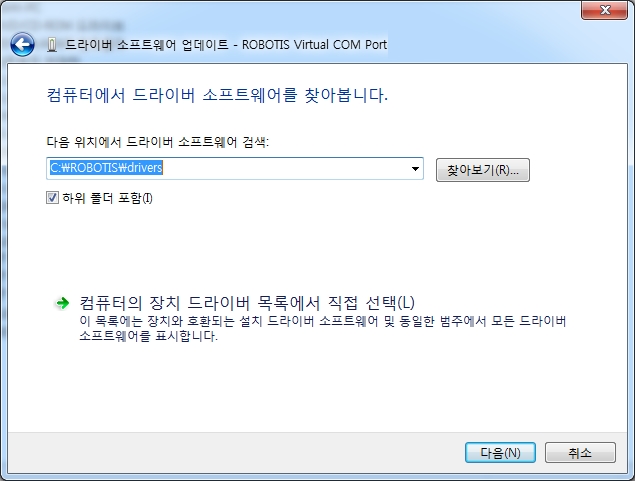
-
“이 드라이버 소프트웨어를 설치합니다.” 를 선택
-
COM포트가 몇 번인지 확인
소프트웨어 사용법
-
CM-900 과 제공된 USB 케이블을 통해 PC와 연결
-
ROBOTIS\ROBOTIS CM-9.exe 실행
-
ROBOTIS CM-9 SW 시리얼 포트 설정에서 CM-900이 연결된 COM포트를 선택(장치관리자 참조)
-
CM-900 H/W 버전에 맞게 선택
-
간편하게 예제 접근
- 아래의 2개 버튼 중에 하나를 선택
- 확인 버튼은 컴파일만 수행
- 다운로드 버튼은 컴파일후 다운로드 수행
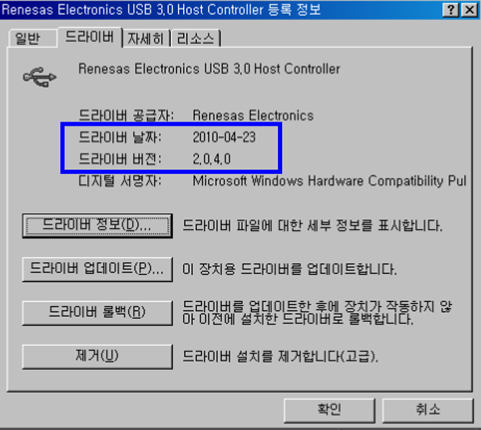
Windows XP 에서 다운로드 에러(Board is not responding) 발생시 USB Host Controller Driver를 업데이트 하시기 바랍니다. 아래와 같이 드라이버 버젼이 낮은경우 문제가 발생할 수 있습니다.
-
시리얼 모니터를 통해 USB 데이터를 바로 확인
CM-900 소프트웨어 다운로드
CM-900은 ROBOTIS CM-9 개발 환경을 이용해 쉽고 편리한 개발을 할 수 있습니다. 사용 중인 OS에 따라 아래의 링크를 통해 다운로드 받을 수 있습니다.
- Download for Windows XP, Vista, 7, 8 : ROBOTIS_CM9-v1.0.0-windows.zip
- Download for Mac OS X (Tested in OS X 10.6.8) : ROBOTIS_CM9-v1.0.0-macosx.dmg
- Download for Linux 64bit (Tested in Ubuntu 12.04) : ROBOTIS_CM9-v1.0.0-linux64.tar.gz
- Download for Linux 32bit (Tested in Ubuntu 10.10) : ROBOTIS_CM9-v1.0.0-linux32.tar.gz
참고자료
인증 획득
표기되지 않은 인증에 대해서는 별도 문의하시기 바랍니다.
FCC
Note: This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is operated in a commercial environment. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the instruction manual, may cause harmful interference to radio communications. Operation of this equipment in a residential area is likely to cause harmful interference in which case the user will be required to correct the interference at his own expense.
WARNING
Any changes or modifications not expressly approved by the manufacturer could void the user’s authority to operate
the equipment.