
Edit on GitHub
자이로 센서 GS-12
개요
- 센서의 각속도를 측정할 수 있습니다.
- 로봇이 얼마나 기울어졌는지, 혹은 어느 방향으로 힘을 받아 움직였는지를 계산할 수 있습니다.
- 로봇이 움직일 때 중심을 잡게 하는 등 여러가지 응용 동작을 프로그래밍 할 수 있습니다.
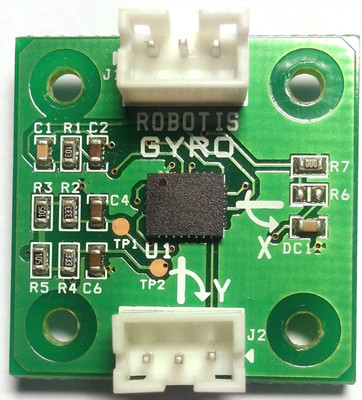
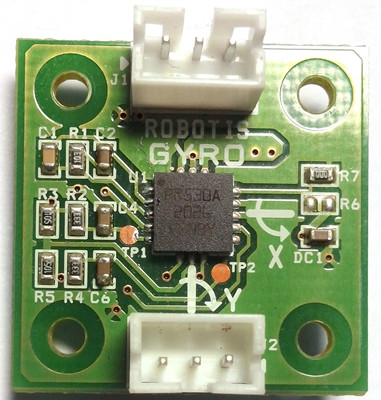
제어기별 연결장치 제어기별 연결장치
참고: 위와 같이 IC가 직사각형이면 신형, 정사각형이면 구형으로 구분이 가능합니다.
사양
- 무게 : 2.8 g
- 크기 : 23mm x 23mm x 10mm
- 동작 온도 : -40°C ~ 85°C
- 각속도 측정 범위 : -300˚/s ~ 300˚/s
- 샘플링 주기 : 140Hz
- 감도 : 3.33mV/dps
- 권장 공급 전압 : 4.5 ~ 5.5 V
핀 배열 정보
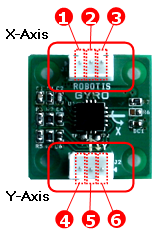
- X축 핀
- ADC : 각속도값을 아날로그 신호로 출력
- GND
- VCC ( 5V )
- Y축 핀
- VCC ( 5V )
- GND
- ADC : 각속도값을 아날로그 신호로 출력
센서 출력
신형 센서
| 항목 | 최대값 | ~ | 최소값 |
|---|---|---|---|
| 출력값 | 510 | 300 | 100 |
| 각속도 | +300 ˚/s | 0 ˚/s | -300 ˚/s |
| 전압값 | 2.5 V | 1.5 V | 0.5 V |
기준 VCC 전압값은 5V입니다.
구형 센서
| 항목 | 최대값 | ~ | 최소값 |
|---|---|---|---|
| 출력값 | 455 | 250 | 45 |
| 각속도 | +300 ˚/s | 0 ˚/s | -300 ˚/s |
| 전압값 | 2.23 V | 1.23 V | 0.23 V |
기준 VCC 전압값은 5V입니다.
- 각속도가 0일 때(가만히 있을 때) 출력값은 약250 입니다. 어느 한 축으로 급격히 회전하였을 때, 최대 455, 최소 45의 값이 출력되며, 300°/s의 각속도를 나타냅니다. 이 때 부호는 방향을 나타냅니다.
- 온도에 따라 약 1%의 오차가 있을 수 있습니다.
- 기준 VCC 전압값, 혹은 회로 노이즈로 인해 값의 오차가 있을 수 있습니다. 따라서, 몇 개의 값을 평균내어 사용하는 것을 권장합니다.(샘플링을 할 때는 로봇이 움직이지 않아야 합니다.)
-
RoboPlus Task에서 사용자 장치 파라미터를 이용하여 값을 읽어올 수 있습니다.
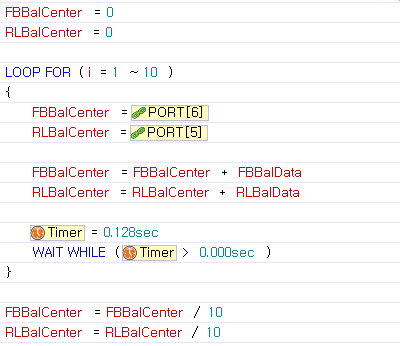
-
다음과 같이 샘플링을 할 수 있습니다. 약 0.1초마다 10회 값을 읽어서 평균을 내고, 그 값을 기준값으로 사용합니다.
튜토리얼
- RoboPlus Task : 로보플러스 태스트의 사용자 장치 파라미터 섹션 참조