
Edit on GitHub
Gazebo Simulation
Gazebo 설치
ROS-Gazebo 패키지 설치
Gazebo with ROS
- Reference : Gazebo Tutorials
RH-P12-RN 패키지 설치
RH-P12-RN 의 Gazebo 패키지를 받기 위해 아래의 명령어를 입력합니다.
$ cd catkin_ws/src
$ git clone https://github.com/ROBOTIS-GIT/RH-P12-RN
추가 설치
ros-kinetic-desktop-full 로 ROS 를 설치했다면 다음 패키지들을 설치해야 합니다.
$ sudo apt install ros-kinetic-ros-control
$ sudo apt install ros-kinetic-ros-controllers
$ sudo apt install ros-kinetic-gazebo-ros-control
시뮬레이터 실행
Gazebo 시뮬레이터를 설정하고 실행하는 방법
권장사항
Gazebo 를 제어 프로그램과 같은 PC 에서 실행할 경우 realtime factor 가 떨어질 수 있으므로, Gazebo 는 별도의 PC 를 이용할 것을 권장합니다.
실행 방법
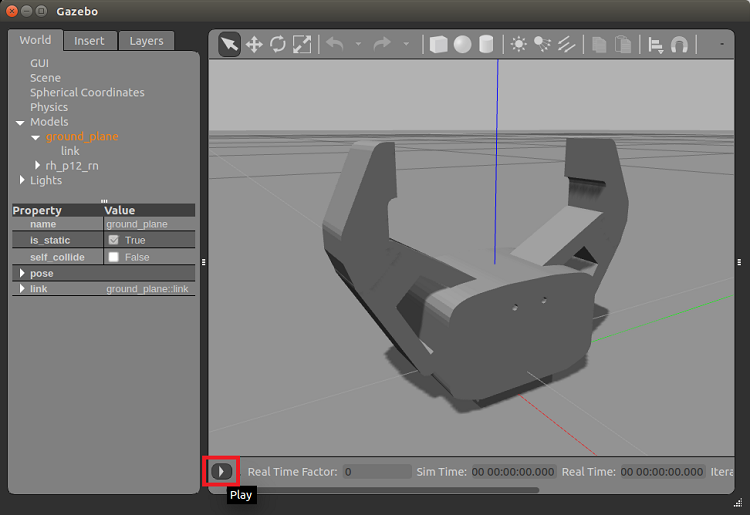
Gazebo 에서 RH-P12-RN 을 불러오기 위한 명령
$ roslaunch rh_p12_rn_gazebo rh_p12_rn_gazebo.launch
Gazebo 의 Play 버튼을 누릅니다.
움직임을 확인하기 위해 터미널을 열고 아래의 명령을 입력합니다.
-
손가락을 열린 상태로 보내는 명령
$ rostopic pub -1 /rh_p12_rn/rh_p12_rn_position/command std_msgs/Float64 "data: 0.0" -
손가락을 닫힌 상태로 보내는 명령
$ rostopic pub -1 /rh_p12_rn/rh_p12_rn_position/command std_msgs/Float64 "data: 1.1"