
개요
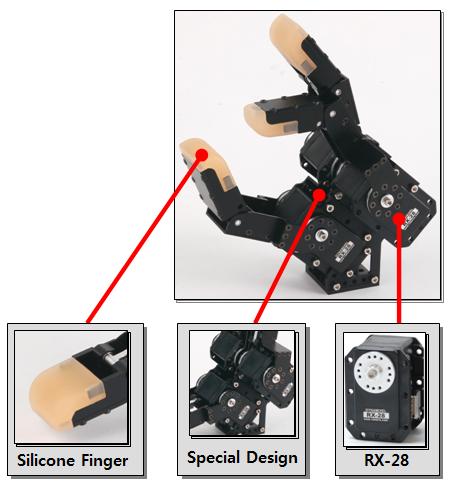
로봇핸드(3 FINGER HAND PHN-33B_R/L)
주의 : 로봇핸드(MX-28)는 현재 단종되어 더 이상 판매되지 않습니다.
주요 사양
| 항목 | 사양 |
|---|---|
| 크기(손을 편 상태) | 167mm x 164mm x 98mm |
| 무게 | 400g |
| 자유도 | 3 DOF (RX-28 x 3) |
| Actuator의 최소 제어각 | 0.29° |
| 힘(손가락 끝) | 2kgf (19.6N) |
| 동작 온도 | -5°C ~ +85°C |
| 사용 전압 | 12 ~ 18.5V (권장 전압 14.4V) |
| 사용 전류 | 0.45A ~ 5.7A (at 18.5V) |
| 인터페이스 | RS-485 Multi Drop BUS |
시작하기
제품 구성
| 부품 | 설명 |
|---|---|
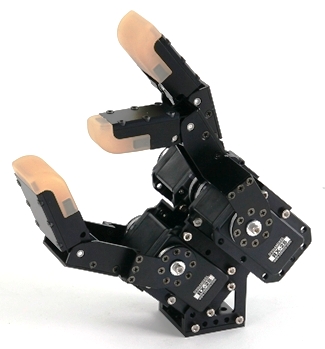 |
Hand 본체 (1개) 오른손과 왼손 옵션에 따라 다릅니다. |
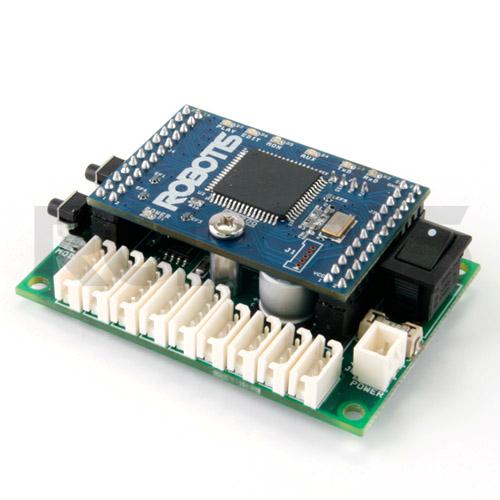 |
CM-700 세트 (1개) Hand와 연결되어 제어하는 장치입니다. (구성품은 첨부되어 있는 문서를 참고하시기 바랍니다.) |
 |
USB 다운로더 LN-101 (1개) PC와 CM-700을 연결하기 위한 장치입니다. |
 |
실리콘 파트 세트 (1개) 여분으로 사용할 수 있는 실리콘 손가락 커버입니다. |
 |
CABLE-PWR01 (1개) SMPS(직류 전원 공급 장치)를 가지고 있는 경우 연결하여 사용할 커넥터입니다. |
 |
WB M2.5*6 (20개) NUT M2.5 (20개) 다이나믹셀과 프레임을 체결할 수 있는 스크류세트입니다. |
 |
4PCABLE-100 (2개) 4PCABLE-200 (1개) Hand와 CM-700을 연결하거나 RX-28끼리 연결할 수 있는 케이블입니다. |
설치
-
RoboPlus CD를 이용해서 PC에 RoboPlus를 설치합니다. (CD가 없는 경우는 홈페이지 자료실에서 받을 수 있습니다.)
-
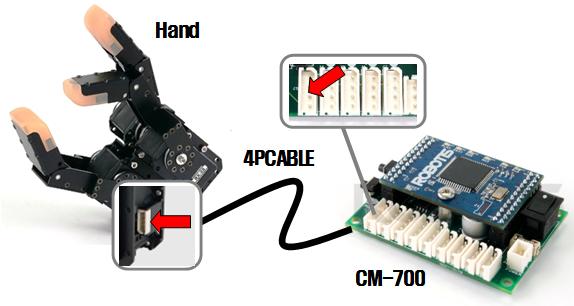
Hand와 CM-700을 4P케이블을 이용해서 연결합니다.
-
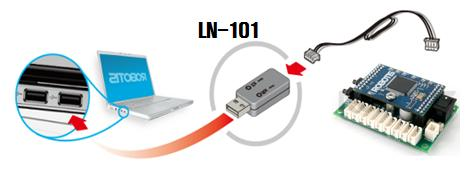
LN-101을 이용해서 CM-700과 PC를 연결합니다. (LN-101 드라이버 설치)
-
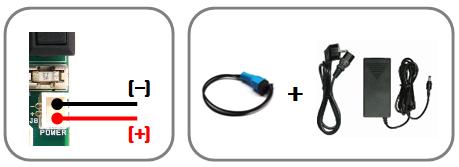
CM-700에 전원을 연결합니다.
- SMPS를 이용하는 경우는 CABLE-PWR01을 이용합니다.
- 직접 전원을 공급하는 경우는 권장 전압과 +/-방향을 주의하시기 바랍니다.
작동
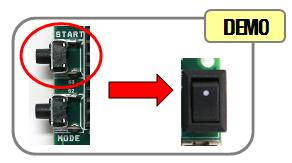
바로 실행할 수 있는 데모 프로그램을 제공하며 최초 구매시에는 설치되어 있습니다. (데모 프로그램 설치 방법)
PC와 연결하지 않고 바로 데모를 실행할 수 있습니다.
아래 단계로 PC와 연결하여 제어할 수도 있습니다.
- LN-101로 PC와 CM-700이 연결된 상태에서 로보플러스 터미널을 실행합니다.
- 올바른 포트 번호를 이용해서 RoboPlus Terminal을 포트와 연결시킵니다.
- CM-700의 전원을 켭니다.
- RoboPlus Terminal에 메시지가 출력되면 정상입니다.
- help를 입력하면 사용 가능한 명령어 목록이 나오며 해당 명령을 입력하면 작동합니다
로봇핸드 프로그래밍
개발자는 CM-700에 들어가는 Hand 제어 프로그램을 만들 수 있습니다.
개발환경 구축하기
CM-700에서 동작하는 프로그램을 만들기 위해서는 Atmega2561 개발 환경인 WinAVR과 Atmel Studio를 설치해야 합니다.
개발에 필요한 정보
개발에 필요한 정보를 얻을 수 있습니다.
데모 프로그램 분석
AVR STUDIO4 다운로드PHN_Development(v1.00).zipAtmel STUDIO6 다운로드PHN_Development(v1.01).zip
소스 구조
공용 소스(플랫폼에 상관 없이 Hand 어플리케이션 개발을 위해 사용할 수 있는 소스)
- dynamixel.h, dynamixel.c : 다이나믹셀과 통신하기 위한 프로토콜이 구현되어 있는 소스
- hand.h, hand.c : Hand를 보다 쉽게 제어하기 위한 API함수
플랫폼 의존 소스(하드웨어에 의존적인 소스이며 다른 플랫폼에서 동작시키려면 포팅이 필요합니다.)
- dxl_hal.h, dxl_hal.c : 실제로 다이나믹셀 패킷을 전송/수신하는 소스
- serial.h, serial.c : PC와 통신하기위한 소스
데모 소스
- demo.c : 데모 프로그램이 구현되어 있는 소스
dynamixel.h, dynamixel.c, dxl_hal.h, dxl_hal.c
이 소스에 대한 정보는 다이나믹셀 SDK에서 보다 자세히 확인할 수 있습니다.
serial.h, serial.c
CM-700에서 UART1을 통해서 PC와 통신하기 위한 소스가 구현되어 있습니다.
PC와 통신은 다음의 설정 값으로 고정되어 있습니다.
- 통신 속도: 57,600bps
- Data 8bit
- 1 Stop bit
- No parity
- No Flow/Hardware Control
표준 입출력 방식을 지원하여 <stdio.h>관련 함수를 사용할 수 있습니다.
각 함수의 사용법은 다음과 같습니다.
- serial_initialize : UART1를 초기화합니다. 통신 속도(bps)를 넘겨줍니다.
- serial_write : UART1을 통해서 데이터를 전송합니다. 전송할 데이터 배열의 포인터와 길이를 넘겨줍니다.
- serial_read : 내부 통신 버퍼에서 수신된 데이터를 꺼내옵니다. 저장할 배열의 포인터와 길이를 넘겨줍니다.
- serial_get_qstate : 통신 버퍼에 들어있는 수신된 데이터 크기를 알려줍니다.
hand.h, hand.c
Dynamixel API를 이용해서 Hand를 보다 직관적으로 제어하기 위해 재구성한 API입니다.
소스를 이해하기에 앞서서 다음을 먼저 알아야 합니다.
- FINGER FLAG: Hand의 각 손가락을 개별 제어하기 위해 flag를 각 함수에 전달합니다.
- FINGER1은 엄지 손가락이고 값은 1입니다.
- FINGER2은 집게 손가락이고 값은 2입니다.
- FINGER3은 가운데 손가락이고 값은 4입니다.
- 손가락 선택별 Flag값은 다음과 같습니다.
- FINGER1 only: 1
- FINGER2 only: 2
- FINGER1 + FINGER3: 1 + 4 = 5
- FINGER2 + FINGER3: 2 + 4 = 6
- 전체 선택: 1 + 2 + 4 = 7
- 컨트롤 테이블 : Hand에 사용된 Actuator 내부 기능을 정의한 테이블이며, 제어하기 위해 알고 있어야 합니다.
각 함수의 사용법은 다음과 같습니다.
- hand_unbend : 손가락을 폅니다. FINGER FLAG와 speed 값을 넘겨줍니다.
동작이 완료될 때까지 Block됩니다. 동작 완료 여부는 다이나믹셀의 Moving flag를 통해 알 수 있습니다. - hand_bend : 손가락을 구부립니다. FINGER FLAG와 speed값을 넘겨줍니다.
동작이 완료될 때까지 Block됩니다. 동작 완료 여부는 다이나믹셀의 Moving flag를 통해 알 수 있습니다. - hand_set_compliance : 각 손가락의 Compliance 제어 특성중 Slope 값을 설정합니다.
- hand_set_torque_limit : 각 손가락의 토크 한계 값을 설정합니다.
- hand_torque_on, hand_torque_off : 각 손가락의 토크를 On/Off시킵니다.
Hand의 설정을 값을 바꾸고 싶다면 Define된 값을 수정할 수 있습니다.
- FINGER_ID : 각 손가락에 사용된 다이나믹셀의 ID입니다. 공장 출하시 설정 값은 다음과 같습니다.
- ID 1 : 엄지 손가락
- ID 2 : 집게 손가락
- ID 3 : 가운데 손가락
- FINGER_UNBEND : 손가락을 폈을때 [Actuator의 위치 값]입니다.
- FINGER_BEND : 손가락을 구부렸을때 [Actuator의 위치 값]입니다.
- FINGER_DIRECTION : 위치 값의 증가 방향이 UNBEND에서 BEND로 되는 것이 1이고, 그 반대가 -1입니다.
Demo.c
Hand 데모 프로그램 예제가 구현되어 있습니다.
프로그램의 동작 구조는 다음과 같습니다.
- Hand를 초기화시킵니다.
- serial/dynamixel 통신을 초기화합니다.
- compliance와 torque limit값을 설정합니다.
- Start버튼이 눌렸는지 확인하여 데모를 실행합니다. (PC연결 없이 데모 실행 기능 제공)
- PC로부터 문자열 입력을 기다립니다.
- 입력된 문자열로부터 명령어를 분리하여 각 기능을 실행하는 것을 반복합니다. (명령어와 파라미터는 공백 문자로 구분됩니다.)
- help: 명령어 설명을 출력합니다. disp_help()
- demo: 데모를 실행합니다. demo()
- bend: 파라미터를 분리하여 hand_bend를 실행합니다.
- unbend: 파라미터를 분리하여 hand_unbend를 실행합니다.
- compliance: 파라미터를 분리하여 hand_compliance를 실행합니다.
- limit: 파라미터를 분리하여 hand_torque_limit를 실행합니다.
- torque: 파라미터를 분리하여 hand_torque_on 혹은 hand_torque_off를 실행합니다.
- exit: 프로그램을 종료합니다.
- 그 외의 명령어는 에러를 출력합니다.
이 프로그램은 일반적인 터미널 프로그램을 이용해서 텍스트기반으로 제어할 수 있습니다.
만약, PC로 Hand를 제어할 경우에는 시리얼 통신 프로그래밍을 통해 해당 명령어를 텍스트로 전송하여 제어 시스템을 구축할 수도 있습니다.
유용한 정보
Force Feedback
이 제품은 접촉면의 힘을 측정할 센서가 부착되어 있지 않아서 Force Feedback을 구현할 수 없습니다.
하지만, 관절에 사용된 Actuator인 다이나믹셀은 Load를 센싱할 수 있는 기능이 있습니다. 이 기능은 많은 제약이 있지만, 아주 기초적으로 Force Feedback을 구현할 수 있습니다.
다이나믹셀의 현재 하중 감지는 다음과 같은 특징이 있습니다.
- 센서로 측정한 것이 아니라 현재의 속도와 출력을 바탕으로 유추한 값입니다. 즉, 실제 토크와 일치하지 않습니다.
- 방향(CW/CCW)과 크기를 알 수 있습니다.
- 약 128msec 느린 업데이트 주기로 인해서 실시간 제어에 활용하기 어렵습니다.
필요에 따라 이 기능을 이용해서 Hand가 물체를 집었는지 안 집었는지를 판단하는 용도로 사용할 수 있습니다.
만약, 접촉면의 힘을 꼭 측정하려면 센서를 부착할 수 있습니다. 구현은 사용자가 직접 해야하며 아래의 절차를 참고하시기 바랍니다.
- 센서를 선정한다. FSR센서 같이 ADC로 입력 받을 수 있는 간단한 센서를 추천합니다.
-
CM-700에 연결하는 권장 회로도와 핀 정보는 아래와 같습니다.
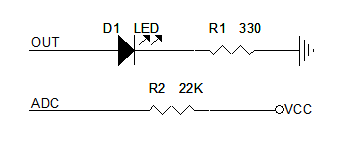
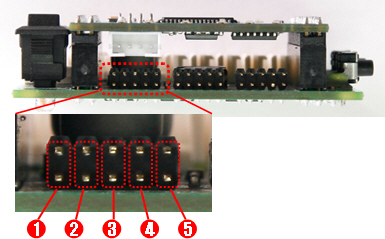
(1) OUT : 5V 포트 제어용
(2) VCC (5V)
(3) ADC : 센서의 아날로그 신호 입력 있음.
(4) GND
(5) NC : 사용하지 않음 - Hand의 손가락에 집을 물건의 접촉이 잘 되도록 센서를 부착합니다.
- CM-700의 ADC 예제를 참고하여 센서의 값을 이용해서 프로그래밍합니다. (하드웨어 포트맵 참고)
로보플러스 사용하기
비 전문가를 위한 개발 환경인 RoboPlus를 이용해서 Hand를 제어할 수 있습니다.
태스크 다운로드PHN_Demo_KR.tsk-
모션 다운로드PHN_Demo_KR_33C.mtn - 로보플러스 사용준비(CM-700 펌웨어 복구)
- 로보플러스 태스크 프로그래밍
- 로보플러스 모션으로 Hand 모션 만들기