
R+ SMART 어플 사용방법
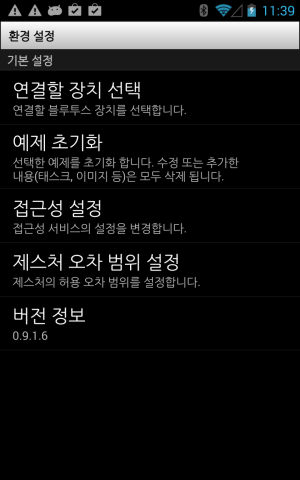
환경설정
-
우측 상단의 설정 버튼을 누르면 환경 설정화면으로 돌아갑니다.

-
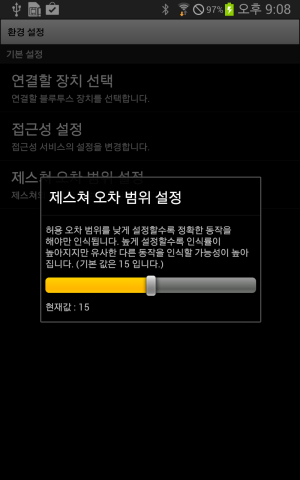
설정화면에서는 연결할 장치, 접근성 서비스, 제스쳐 오차범위 설정을 할 수 있습니다.
-
연결할 장치: 블루투스 모듈에 적힌 주소를 검색된 리스트에 서 선택하면 제어기 연결시 선택한 장치로 연결을 시도합니다.
-
예제 초기화 : 각각의 예제를 초기화 합니다. 실수로 예제에 사용된 이미지 또는 태스크 등을 삭제 하였을 때, 원래 상태로 되돌릴 수 있습니다. 예제를 선택한 후, 초기화 할 때에 사용자가 수정한 태스크나 이미지 등은 모두 삭제 됩니다.
-
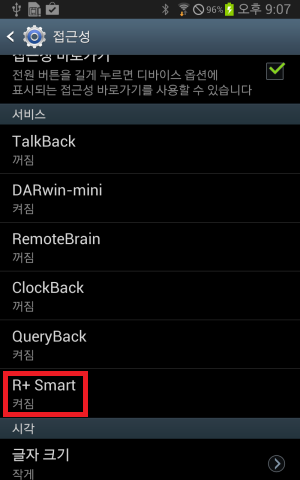
접근성 설정: 이벤트 기능을 위해서는 기능을 활성화 해야 합니다.
-
제스쳐 오차 범위 설정: 제스쳐 기능의 정확도를 설정합니다.
R+m.Task 연동
-
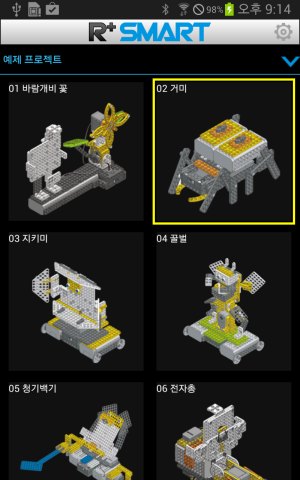
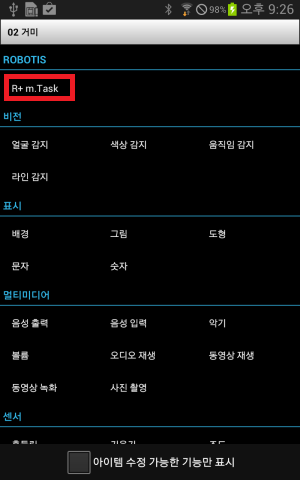
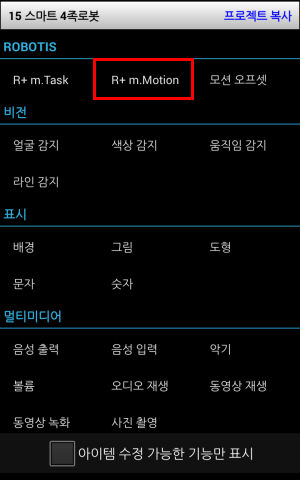
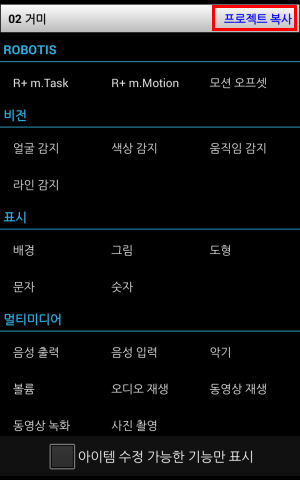
프로젝트를 길게 누르고 있으면 기능 확인 및 수정 가능한 화면이 표시 됩니다.
-
표시된 화면에서 R+mTask를 클릭합니다.
-
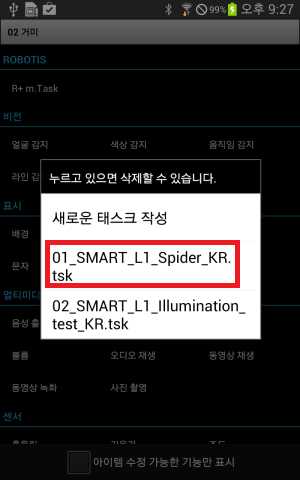
태스크를 선택하면 R+m.Task가 실행됩니다.
-
메뉴 버튼을 클릭하여 제어기로 태스크를 다운로드 할 수 있습니다.

R+m.Motion 연동
-
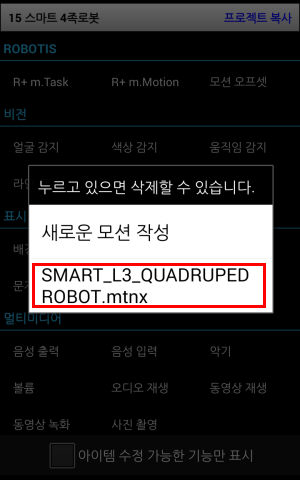
프로젝트를 길게 누르고 있으면 푯기되는 기능 확인 및 수정 가능한 화면에서 R+m.Motion을 클릭합니다.
-
모션을 선택하면 R+ m.Motion 이 실행됩니다.
-
R+ m.Motion 과 관련된 내용은 [R+ Motion 2.0] 을 참조하세요.
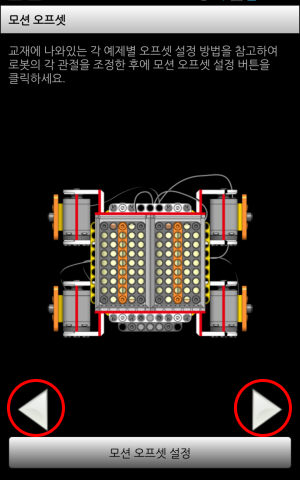
모션 오프셋 설정
-
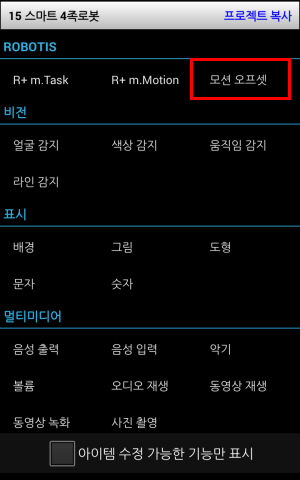
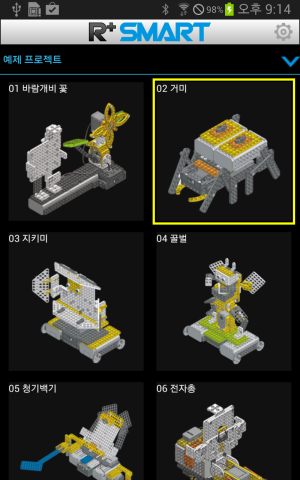
프로젝트를 길게 누르고 있으면 표시되는 기능 확인 및 수정 가능한 화면에서 모션 오프셋을 클릭합니다.
-
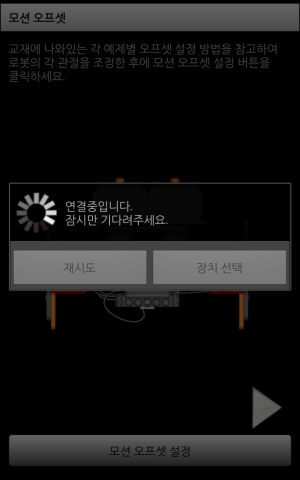
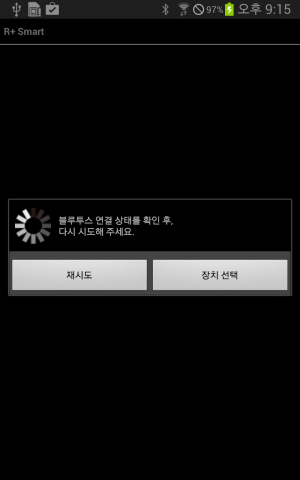
연결이 되지 않는 다면 “재시도”를 클릭하거나 “장치 선택”을 클릭해서 올바른 블루투스를 선택합니다.
-
모션을 사용하는 예제(스마트 4족로봇, 스마트 강아지, 변신 로봇, 스마트 드로이드)의 경우, 화살표를 클릭하면 각 관절의 위치를 다른 방향에서 확인 할 수 있습니다.
-
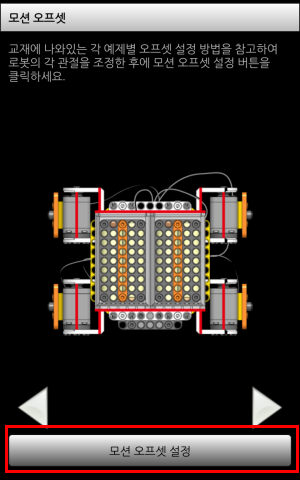
오프셋 설정 방법에 따라 로봇의 각 관절을 저장한 후, 모션 오프셋 설정버튼을 클릭합니다.
프로젝트 실행
-
로봇의 시작버튼을 누르고 블루투스를 연결한 후, 해당 프로젝트를 짧게 클릭합니다.
-
연결이 되지 않는 다면 “재시도”를 클릭하거나 “장치 선택”을 클릭해서 올바른 블루투스를 선택합니다.
-
연결이 되면 태스크로 작성한 화면이 표시됩니다.(만약 PIN 넘버를 입력하는 화면이 나오면
0000을 입력합니다.)
프로젝트 복사
-
프로젝트를 길게 누르고 있으면 표시되는 기능 확인 및 수정 가능한 화면에서 프로젝트 복사를 클릭합니다.
-
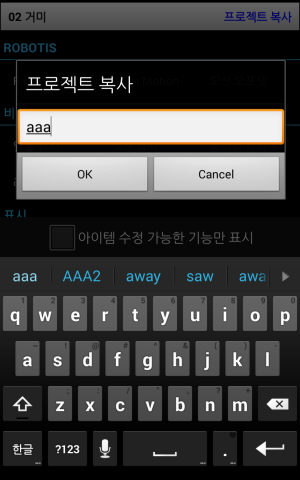
복사할 프로젝트 이름을 입력한 후 ok 버튼을 클릭합니다.
-
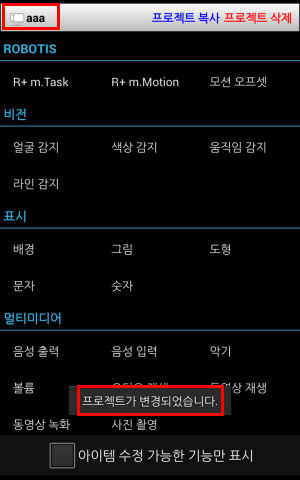
복사가 완료되면 프로젝트 이름이 변경됩니다.
-
복사한 프로젝트는 사용자 프로젝트로 추가됩니다.
프로젝트 이름 변경
-
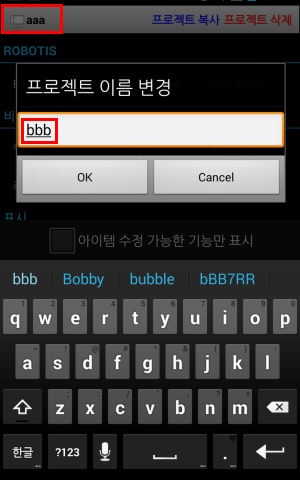
프로젝트를 길게 누르고 있으면 표시되는 기능 확인 및 수정 가능한 화면에서 프로젝트 이름을 클릭합니다. (사용자 프로젝트만 이름을 변경할 수 있습니다.)
-
새로운 프로젝트 이름을 입력한 후 ok 버튼을 클릭합니다.
-
입력한 이름으로 프로젝트가 변경됩니다.
R+ Smart 어플 기능확인/수정
기능확인
예제 기울기
-
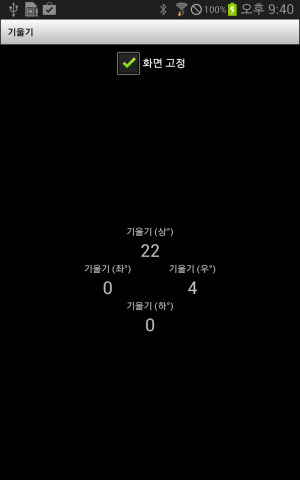
기울기를 클릭합니다.
-
표시되는 기울기 값을 확인합니다.
-
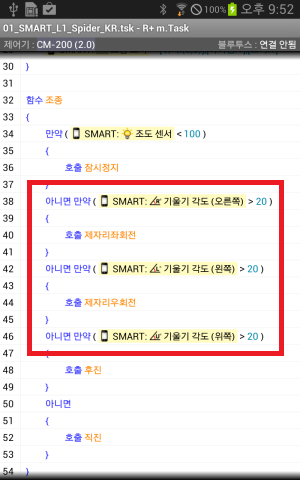
확인한 값에 따라서 태스크를 시작합니다.
기능수정
예제 그림
-
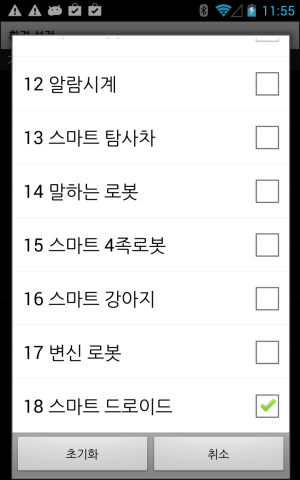
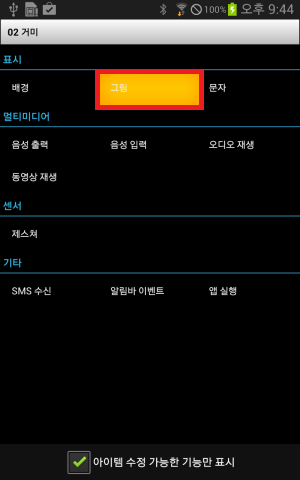
화면 아래의 체크박스를 클릭하면 수정 가능한 기능들만 표시 됩니다.

-
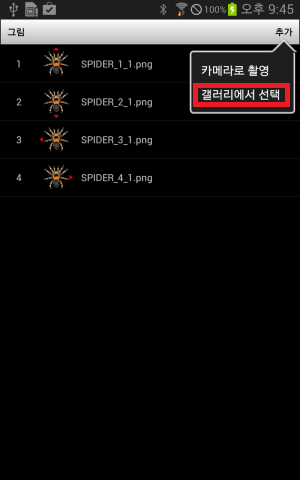
“그림”을 클릭합니다.
-
우측 상단의 “상단” 버튼을 클릭, “갤러리에서 선택”을 클릭합니다.
-
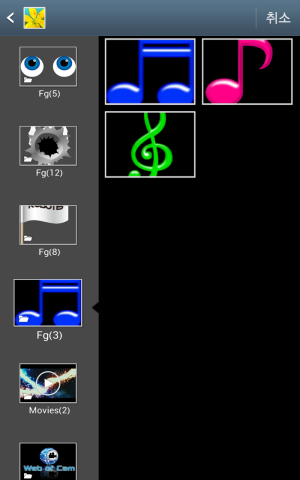
이미지를 선택합니다.
-
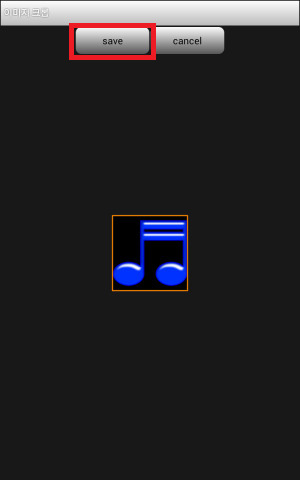
주황색 사각형을 터치하여 크롭할 영역을 선택 후, save 버튼을 클립합니다.
-
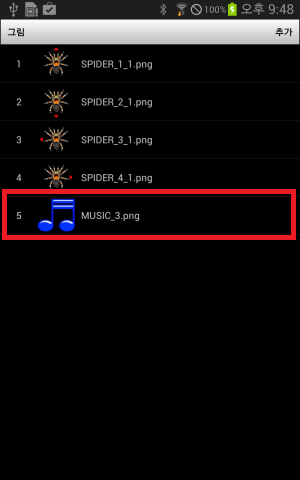
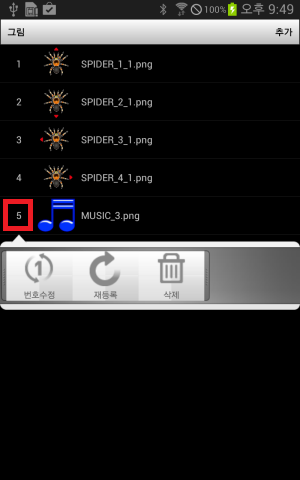
이미지 추가됩니다.
-
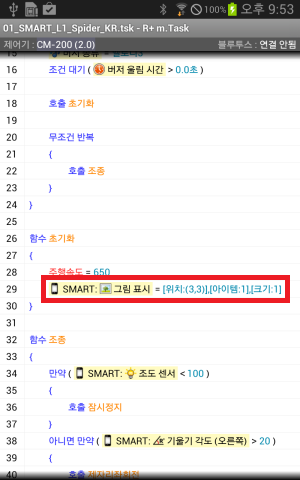
왼쪽의 숫자(아이쳄 번호)를 이용하여 태스크에서 그림을 표시할 수 있습니다.
-
왼쪽의 숫자를 클릭하면 번호 수정, 재등록, 삭제 등을 할 수 있습니다.
R+ SMART Control Table
| 주소 | 이름 | 속성 | 기본값 | 최소값 | 최대값 | 길이 | 값 설명 |
|---|---|---|---|---|---|---|---|
| 10000 | 디버그 정보 표시 | 읽기/쓰기 | 0 | 0 | 4 | 센서, 터치, 감지영역 등의 정보를 화면에 출력 0 : 끄기 1 : 비전관련 위치, 색상 표시 2 : 센서 흔들림 값 표시 4 : 기울기 상하좌우 값 표시 8 : 조도 값 표시 16 : 자기장 값 표시 32 : 방향 값 표시 64 : 소음 값 표시 128 : 터치 영역 1, 2 값 표시 256 : 음성입력 결과 값 표시 512 : SMS 관련 전화번호, 내용 표시 1024 : 상태바 값 표시 |
|
| 10010 | 화면 회전 | 읽기/쓰기 | 0 | 0 | 2 | 1 | (읽기) 0 : 자동 , 1 : 세로 , 2 : 가로 (쓰기) 0 : 자동 , 1 : 세로 , 2 : 가로 |
| 10020 | 카메라 선택 | 읽기/쓰기 | 0 | 0 | 2 | 1 | 0 : 종료 , 1 : 후면카메라 , 2 : 전면카메라 |
| 10030 | 카메라 줌 | 읽기/쓰기 | 0 | 0 | 255 | 1 | 0 ~ 255 : 확대 정도 |
| 10040 | 카메라 기능 선택 | 읽기/쓰기 | 0 | 0 | 5 | 1 | 0 : 빈화면 1 : 얼굴감지 2 : 색감지 3 : 움직임감지 4 : 라인감지 |
| 10050 | 감지 색상 (라인감지용) | 읽기/쓰기 | 0 | 0 | 5 | 1 | 2 : 흑 , 3 : 적 , 4 : 녹 , 5 : 청 |
| 10060 | 동영상 녹화 | 읽기/쓰기 | 0 | 1 | 1 | 1 | 0 : 녹화 정지 , 1 : 녹화 시작 녹화 중에는 화면 회전 설정, 카메라 선택, 소음기능 안됨. |
| 10070 | 사진 촬영 | 읽기/쓰기 | 0 | 1 | 1 | 1 | 0 : 촬영 정지 , 1 : 촬영 시작 |
| 10080 | 얼굴 감지 위치 | 읽기 | 0 | 0 | 25 | 1 | 1 ~ 25 사이의 화면 영역[i] |
| 10090 | 감지 색상 (색상감지용) | 읽기 | 0 | 0 | 5 | 1 | 0 : 감지 안됨. 혹은 모르는 색상 2 : 흑 , 3 : 적 , 4 : 녹 , 5 : 청 |
| 10100 | 움직임 감지 위치 | 읽기 | 0 | 0 | 25 | 1 | 1 ~ 25 사이의 화면 영역 |
| 10110 | 라인 감지 위치 | 읽기 | 0 | 0 | 5 | 1 | 1 ~ 5 사이의 화면 영역 |
| 10130 | 배경 표시 | 읽기/쓰기 | 0 | 0 | 199 | 1 | (읽기) 마지막으로 설정된 이미지 번호 (쓰기) 배경 이미지로 사용할 이미지 번호 0 : 배경지움(카메라 사용 시 투명. 그 외 검정.) |
| 10140 | 그림 표시 | 읽기/쓰기 | 0 | 0 | 3 | 값 : (배율 * 65536) + (이미지번호 * 256) + (이미지위치) 이미지위치 : 1 ~ 25 사이의 화면 영역 이미지번호 : 앱에 등록된 이미지 번호 (읽기) 마지막으로 설정된 이미지 번호와 위치 및 배율 (쓰기) 전경 이미지로 사용할 이미지 번호와 위치 및 배율 이미지번호 = 0 : 해당 위치의 이미지 삭제 * 배율 (1~10 : x배 확대, 11~20 : x배 축소) |
|
| 10145 | 그림 자동 표시 (얼굴 감지시) | 읽기/쓰기 | 0 | 0 | 199 | 1 | (읽기) 현재의 전경이미지 아이템 번호 (쓰기) 전경 이미지의 아이템 번호를 사용하여 자동 표시 |
| 10150 | 도형 표시 | 읽기/쓰기 | 0 | 0 | 4 | 값 : (도형색상 * 16777216) + (도형크기 * 65536)+ (도형번호 * 256) + (도형위치) 도형색상 : 0 : 알 수 없음 1 : 흰색, 2 : 검은색, 3 : 빨간색, 4 : 녹색, 5 : 청색 6 : 노랑색, 7 : 옅은회색, 8 : 회색, 9 : 어두운 회색 도형크기 : 0 ~ 255 사이의 크기 값 도형위치 : 1 ~ 25 사이의 화면 영역 도형번호 : 0 : 도형 삭제 1 : 원, 2 : 사각, 3 : 삼각 (읽기) 마지막으로 설정된 도형의 정보 (쓰기) 화면에 표시할 도형의 정보 도형위치 = 0, 도형번호 = 0 : 모든 도형 삭제 |
|
| 10160 | 문자 표시 | 읽기/쓰기 | 0 | 0 | 4 | 값 : 도형번호만 문자번호로 바뀌고 도형과 동일 문자번호 : 앱에 등록된 문자의 번호 문자번호 200 : SMS 또는 메시지 수신시 내용 저장 |
|
| 10170 | 숫자 표시 | 읽기/쓰기 | 0 | 0 | 4 | 값 : 도형번호만 숫자로 바뀌고 도형과 동일 숫자 : 0 ~ 255 : 해당 숫자 표시 (읽기) 마지막으로 설정된 숫자의 정보 (쓰기) 화면에 표시할 숫자의 정보 숫자크기 = 0 : 해당 위치의 숫자 삭제 숫자위치 = 0, 숫자크기 = 0 : 모든 숫자 삭제 |
|
| 10180 | 음성 출력(TTS) | 읽기/쓰기 | 0 | 0 | 200 | 4 | (읽기) 0 : 동작안함, 1 ~ 200 : TTS 변환중인 문자 번호 (쓰기) 0 : 변환 중지. 1 ~ 200 : TTS 변환할 문자 번호 |
| 10190 | 악기 연주 | 읽기/쓰기 | 0 | 0 | 4 | 값 : (악기종류 * 65536) + (옥타브 * 256) + (음계) 악기종류 : 앱의 악기 종류 참조 (1 ~ 128) 옥타브 : 0 ~ 10 사이의 옥타브 값 음계 : 1 ~ 12 사이의 음계 값 (‘도’ 부터 반음씩 증가) |
|
| 10200 | 오디오 재생 1 | 읽기/쓰기 | 0 | 0 | 199 | 1 | (읽기) 재생중인 오디오 번호 (쓰기) 0 : 재생 중지. 1 ~ 199 : 재생할 오디오 번호 |
| 10380 | 오디오 재생 2 | 읽기/쓰기 | 0 | 0 | 199 | 1 | (읽기) 재생중인 오디오 번호 (쓰기) 0 : 재생 중지. 1 ~ 199 : 재생할 오디오 번호 |
| 10210 | 동영상 재생 | 읽기/쓰기 | 0 | 0 | 199 | 1 | (읽기) 재생중인 동영상 번호 (쓰기) 0 : 재생 중지. 1 ~ 199 : 재생할 동영상 번호 |
| 10410 | 동영상 정지 | 읽기/쓰기 | 0 | 0 | 1 | 1 | (읽기) 0: 재생중, 1 : 정지중 (쓰기) 0: 재생, 1 : 정지 |
| 10220 | 동영상 정지 | 읽기/쓰기 | 0 | 0 | 1 | 1 | (읽기) 0 : 동작 안함. 1 : 동작 중 (쓰기) 0 : 동작 중지. 1 : 동작 시작 |
| 10230 | 음성 인식 결과 | 읽기/쓰기 | 0 | 0 | 199 | 1 | (읽기) 음성인식 결과 인식된 문자의 번호 (쓰기) 값 초기화 |
| 10240 | 볼륨 | 읽기/쓰기 | 0 | 0 | 255 | 1 | 볼륨 크기 |
| 10250 | 흔들기 | 읽기 | 0 | 0 | 255 | 1 | 스마트폰이 흔들리는 강도 |
| 10260 | 기울기 (왼쪽) | 읽기 | 0 | 0 | 90 | 1 | 0 ~ 90 |
| 10261 | 기울기 (오른쪽) | 읽기 | 0 | 0 | 90 | 1 | 0 ~ 90 |
| 10262 | 기울기 (위쪽) | 읽기 | 0 | 0 | 90 | 1 | 0 ~ 90 |
| 10263 | 기울기 (아래쪽) | 읽기 | 0 | 0 | 90 | 1 | 0 ~ 90 |
| 10270 | 조도 | 읽기 | 0 | 0 | 65535 | 2 | 조도 센서 값 |
| 10280 | 자기장 | 읽기 | 0 | 0 | 65535 | 2 | 자기장 센서 값 |
| 10290 | 방향 (각도값) | 읽기 | 0 | 0 | 359 | 2 | 0 : 북쪽, 90 : 동쪽, 180 : 남쪽, 270 : 서쪽 0 ~ 359 도 까지의 각도 |
| 10300 | 소음 (db) | 읽기 | 0 | 0 | 255 | 1 | 소음의 정도를 db 로 읽어옴 |
| 10310 | 터치 위치 1 | 읽기 | 0 | 0 | 25 | 1 | 1 ~ 25 사이의 화면 영역 |
| 10400 | 터치 위치 2 | 읽기 | 0 | 0 | 25 | 1 | 1 ~ 25 사이의 화면 영역 |
| 10320 | SMS 전화번호 | 읽기/쓰기 | 0 | 0 | 200 | 1 | (읽기) 0 : SMS 수신 안됨 1 ~ 199 : SMS를 보내온 전화번호의 등록 번호 200 : SMS를 보내온 전화번호가 미등록 번호 (쓰기) 값 초기화 |
| 10321 | SMS 내용 | 읽기/쓰기 | 0 | 0 | 200 | 1 | (읽기) 0 : SMS 수신 안됨 1 ~ 199 : SMS 수신된 텍스트의 등록 번호 200 : SMS 는 수신했지만 미등록 텍스트 (쓰기) 값 초기화 |
| 10330 | 알림바 이벤트 | 읽기/쓰기 | 0 | 0 | 200 | 1 | (읽기) 0 : 카톡 등 알림바 수신 안됨 1 ~ 199 : 알림바 수신된 텍스트의 등록 번호 200 : 알림은 수신했지만 미등록 텍스트 (쓰기) 값 초기화 |
| 10340 | 타이머 | 읽기/쓰기 | 0 | 0 | 65535 | 2 | (읽기) 남은 시간을 반환 (쓰기) 초 단위 타이머 값 (최대 18시간) |
| 10350 | 진동 시간 | 읽기/쓰기 | 0 | 0 | 255 | 1 | (읽기) 0 : 진동 동작 안함, 1 : 진동 동작 중 (쓰기) 진동 시킬 시간 (1/100초 단위) |
| 10360 | 플래시 | 읽기/쓰기 | 0 | 0 | 1 | 1 | 0 : 플래시 꺼짐, 1 : 플래시 켜짐 |
| 10370 | 앱 실행 | 읽기/쓰기 | 0 | 0 | 199 | 1 | (읽기) 마지막으로 실행한 앱 번호 (쓰기) 실행 시킬 앱 번호) |
| 10390 | 현재 시간 | 읽기 | 0 | 0 | 2 | 값 : 분단위 | |
| 10420 | 메일발송 | 읽기/쓰기 | 0 | 0 | 2 | 1 | (읽기) 0: 미발송, 1: 발송중, 2: 정상 발송, 3: 에러발생 (쓰기) 0: 미동작 1: 캡쳐된 최근 이미지, 2: 녹화된 최근 동영상 첨부 - 같은 파일 연속으로 발생 불가 - 촬영하면서 발송하는 경우, 발송후 상태를 확인하지 않으면 스레드로 실행됨으로 상태가 부정확해짐 |
| 10430 | 화면출력 | 읽기/쓰기 | 0 | 0 | 4 | Roboplus 프로그램 출력보기와 같은 기능 | |
| 10440 | 화면출력후 줄바꿈 | 읽기/쓰기 | 0 | 0 | 4 | Roboplus 프로그램 출력보기와 같은 기능 | |
| 10450 | 제스쳐 | 읽기/쓰기 | 0 | 0 | 200 | 1 | (읽기) 인식된 제스쳐 번호 (쓰기) 값 초기화 |
R+ SMART 다운로드/설치
주의 : 구글의 변경된 정책으로 SMS 기능은 더이상 지원되지 않습니다.
SMS 기능이 필요한 경우 이전 버전의 앱 설치파일(APK)을 다운로드 받아 수동으로 설치하시기 바랍니다.
이전 버전 사용시 최신 업데이트가 반영되지 않는 점 유의하시기 바랍니다.
R+ SMART (v0.9.3.6) 다운로드
R+ SMART2 (v0.9.3.6) 다운로드
R+ SMART3 (v0.9.6.1) 다운로드
참고 : 인터넷에서 받은 앱 설치하기
- 시스템 최저 요구 사양
- OS : Android 2.3이상
- 하드웨어 : 1.2 dual-core CPU, 1GB RAM 이상, 블루투스 및 센서 내장 기기
- 통신
- BT-410 지원 (Android 4.4이상)
- BT-210, BT-110 지원
다운로드Android 앱 다운로드
- 스마트 기기에서
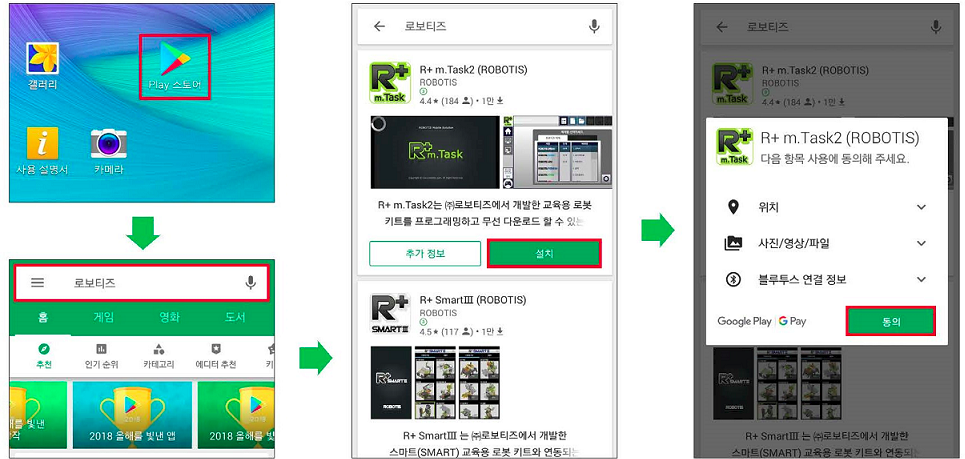
구글 플레이를 실행합니다. (구글 플레이는 안드로이드 마켓 앱입니다.) - Play스토어에서
R+ SMART를 검색한 후 설치합니다. -
구글 플레이에서
로보티즈또는R+ Smart로 검색해서 설치합니다.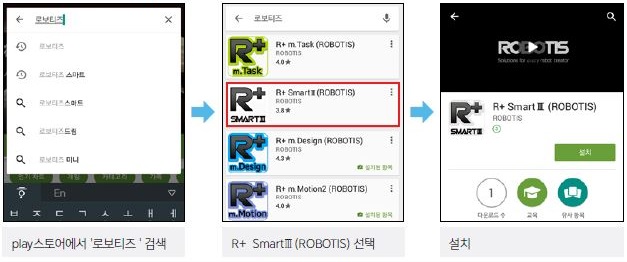
-
설치 후, 실행하면 SD card\Smart에 폴더가 아래와 같이 생성됩니다.
-
Custom 에는 사용자 프로젝트, system에는 예제 프로젝트가 기록됩니다.

-
System에서 각 프로젝트는 다음과 같은 구조를 가집니다.
- Audio : 프로젝트에서 사용되는 사운드 파일이 저장됩니다.
- Capture : 프로젝트에서 캡쳐된 사진 파일이 저장됩니다.
- Db : 프로젝트에서 사용되는 모든 파일 정보 및 제즈쳐 파일이 저장됩니다.
- Image : 프로젝트에서 사용되는 이미지 파일이 저장됩니다.
- Recorded : 프로젝트에서 녹화된 동영상 파일이 저장 됩니다.
- Task : 프로젝트 관련 태스크 파일이 저장됩니다. PC에서 태스크를 작성하였다면 스마트 단말기를 PC 와 연결하여 작성한 태스크 파일을 해당 프로젝트의 Task 폴더에 복사하면 R+m.Task 또는 R+m.Task2와 연동하여 사용할 수 있습니다.
- Video : 프로젝트에서 사용되는 동영상 파일이 저장됩니다.

참고자료
모션파일 다운로드
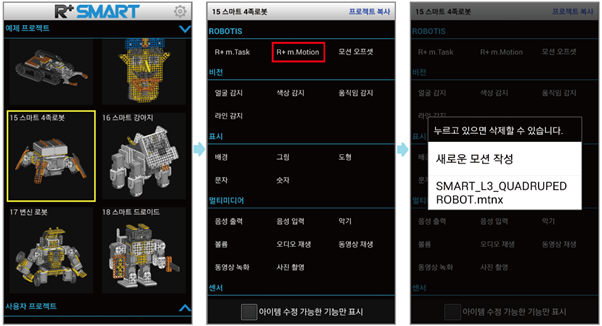
- R+ SMART 앱을 실행시키고, 작동하고자 하는 예제 그림을 길게 터치합니다. (스마트3 앱에서는 예제 그림 하단의 편집 버튼을 선택합니다.)
- 새로 나타난 화면에서 ROBOTIS > ‘R+ m.Motion’을 선택합니다.
-
세부 메뉴 창에서 받고자 하는 모션 파일을 선택하면 자동으로 R+ m.Motion 앱이 실행됩니다.
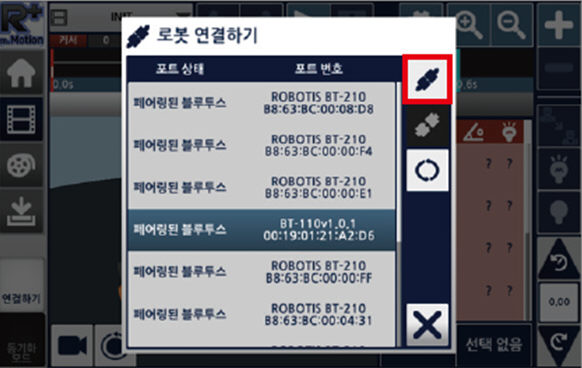
- 제어기의 전원을 켜고, 화면 왼쪽 아래에 있는 ‘연결’ 버튼을 터치하면 연결할 수 있는 장치의 목록이 나타납니다.
- 목록에서 나의 로봇에 연결된 블루투스(BT-210)을 선택하고 ‘연결하기’를 터치합니다. (이 때, 스마트기기와 블루투스가 연결되어 있지 않으면 “장치 선택 창” 이 열리므로 블루투스를 선택하여 연결해 주면 됩니다.)
-
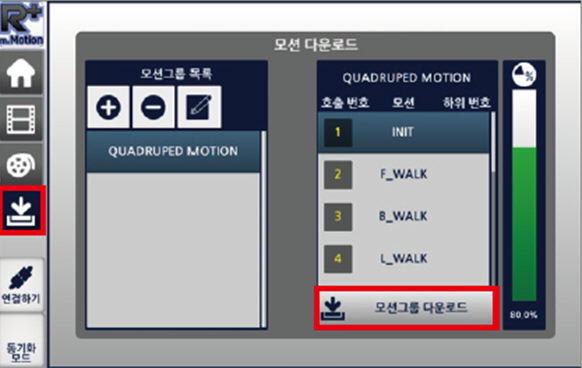
창이 사라지면 ‘모션 다운로드’ 탭을 선택하고, ‘모션그룹 다운로드’ 버튼을 터치합니다.

제어기와 스마트기기 연결
블루투스를 CM-200 제어기에 연결하기
- 블루투스를 CM-200의
HOST LINK포트에 연결합니다. -
CM-200의 시작버튼을 한 번 누르고 블루투스의 LED가 깜빡이면 제어기와 블루투스가 정상적으로 연결된 것입니다.
블루투스를 OpenCM7.0 제어기에 연결하기
- 블루투스를 OpenCM7.0의
4핀 포트에 연결합니다. -
OpenCM7.0의 시작버튼을 한 번 누르고 블루투스의 LED가 깜빡이면 제어기와 블루투스가 정상적으로 연결된 것입니다.
블루투스를 통해 제어기와 스마트기기 연결하기
- R+SMART 앱을 실행한 후 우측 상단에 환경설정을 선택합니다.
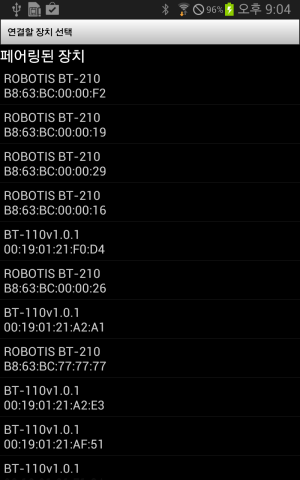
- 환경설정 창이 뜨면 “연결할 장치 선택”을 선택합니다.
- 연결할 장치를 선택하라는 창이 뜨면 하단의 목록 중에서 제어기에 연결된 블루투스(BT-210)의 윗면에 있는 번호와 동일한 번호를 선택합니다.
- 만약 동일한 번호가 없으면 검색을 통해 등록합니다.(이때, PIN정보가 필요합니다. PIN은
0000으로 기본 설정되어 있습니다.)
참고: PIN 정보는 로보티즈 고객지원센터를 통해서만 변경이 가능합니다.
태스크파일 다운로드
- R+ SMART 앱을 실행하고 작동하고자 하는 로봇예제 이미지를 길게 누른후 아이템 > R+m.Task 또는 R+m.Task2 를 선택합니다. (스마트3 앱에서는 예제 그림 하단의 편집 버튼을 선택합니다.)
- R+m.Task 또는 R+m.Task2를 선택하면 해당 로봇예제의 task 파일들이 확인됩니다. 이 중에서 다운받고자 하는 task 파일을 선택합니다.
-
정상적으로 실행되면 task 파일이 열립니다.
- 스마트기기의 메뉴를 누르고 “다운로드” 를 누르면 블루투스를 통해 무선으로 연결된 제어기에 task 파일이 다운로드 됩니다.
(이 때, 스마트기기와 블루투스가 연결되어 있지 않으면 “장치 선택 창” 이 열리므로 블루투스를 선택하여 연결해 주면 됩니다.) -
다운로드가 완료되면 다운로드가 완료되었다는 메시지가 나타납니다.
