개요

- 미려한프레임의 적용으로 굿디자인 선정
- 6mm 격자의 올로 프레임과 호환성 유지
- 소형 다이나믹셀 XL-320 적용으로 다양한 모션 가능
- STEAMCUP MINI 전용 App 제공 (터치, 제스처, 음성인식, 메신저)
- 사용자 편의를 위한 다양한 기능 지원 (배터리 잔량체크, 오프셋 설정 등)
- R+ Task 및 R+ Motion 연동 지원
- 컬러센서, LED 모듈 등 추가 장치 확장 가능
주의사항
본 제품은 사용자가 스스로 조립해야 하므로 안전에 각별히 주의해야 하며, 본인 부주의로 발생한 사고의 책임은 본인에게 있습니다.
- 안전에 대한 주의사항
- 사용 전에 설명서를 충분히 읽으십시오.
- 권장 공구만을 사용하며 특히 칼이나 드릴 같은 위험한 공구를 사용하지 마십시오.
- 로봇이 동작할 때 절대로 만지거나 얼굴을 가까이 가져가지 마십시오.
- 손가락이 로봇의 관절에 끼이지 않도록 유의하십시오.
- 직사광선이나 고온상태에서 로봇을 보관하거나 작동하지 마십시오.
- 방수 제품이 아니니, 물기가 있는 곳에서 절대 동작시키지 마십시오.
- 부품을 임의로 분해하거나 개조하여 사용하지 마십시오.
- 로봇이나 부품이 유아나 어린이의 손에 닿지 않도록 유의하십시오.
- 로봇이나 부품에 충격을 가하거나 날카로운 물체로 찌르지 마십시오.
- 리튬이온전지의 금속부분을 머리핀, 클립 등과 같은 금속물체와 연결하지 마십시오.
- 리튬이온전지박스의 금속부분을 휘게 하거나 망가뜨리지 않게 유의하십시오.
- 리튬이온전지에 납땜하거나 전자레인지와 같은 고압 용기에 넣지 마십시오.
- 리튬이온전지를 물에 담그거나 닿게 하지 마십시오.
- 조립 시 주의사항
- 나사를 조이는 드라이버는 반드시 지정된 사양의 드라이버(M2 size)를 사용하십시오.
- 무리한 힘으로 나사를 돌리거나 부품을 끼우지 마십시오.
- 책상이나 테이블에서 로봇을 동작시키면 바닥으로 떨어질 위험이 있으므로 반드시 바닥에서 동작시키십시오.
- 낙하에 의한 파손 등은 본인 부주의로 인한 것이므로 무상 수리되지 않습니다.
- 로봇 관절, 다이나믹셀 XL-320 내부의 기어는 소모품입니다. 오래 사용하거나 무리하게 사용하면 기어의 유격(backlash)이 커질 수 있습니다.
- 사용 시 주의사항
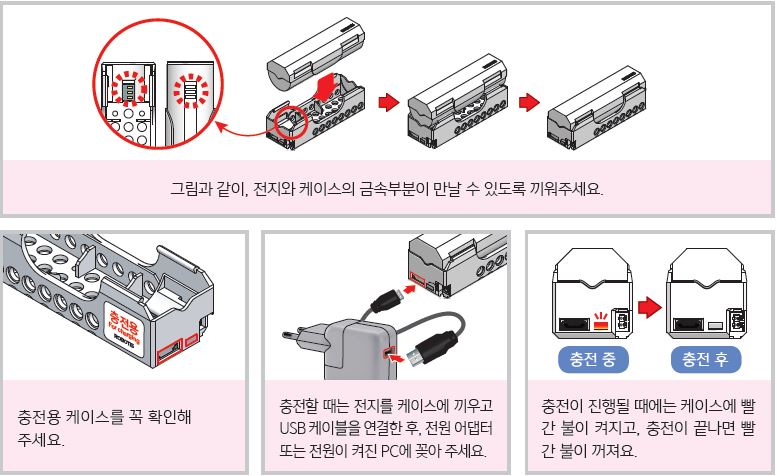
리튬이온전지 충전
반드시 USB 케이블 커넥가 삽입된 충전용 케이스에 끼워서 충전해 주세요. 처음 사용 시 리튬이온전지를 꼭 충전해 주세요.
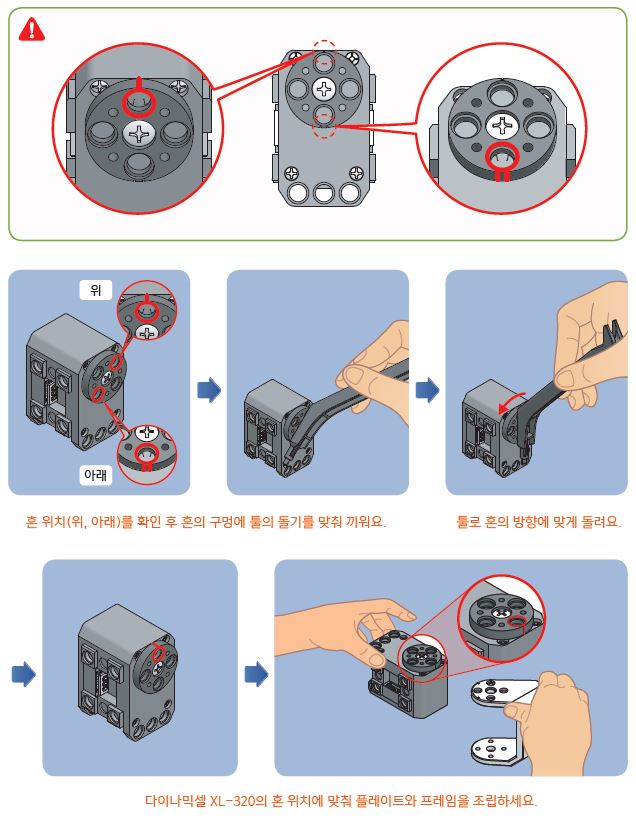
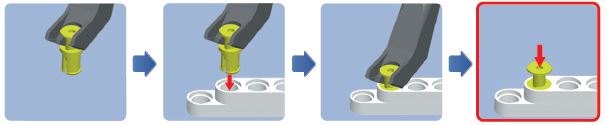
다이나믹셀 XL-320의 프레임 결합
다이나믹셀 XL-320에 프레임을 결합할 때에는 조립서에 표시된 혼의 위,아래 표시를 확인하고 결합합니다.
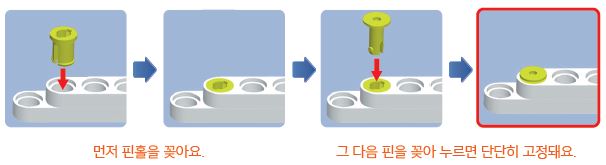
리벳 사용
리벳은 볼트와 너트 없이 간편하게 플레이트를 결합할 수 있는 결합체입니다.
- 처음 만들 때는 리벳이 조립되어 있지 않습니다. 이럴 땐 핀홀을 먼저 꽂고, 그 다음에 핀을 꽂으면됩니다.
- 툴을 이용해서 조립된 리벳을 분리시킬 수 있습니다. 툴로 핀을 잡은 후 위로 잡아 올리면 리벳이분리됩니다.

- 툴로 뽑은 리벳은 핀과 핀홀이 따로 분리되지 않습니다. 이것을 다시 사용하려면 핀홀 부분부터 눌러끼워야 합니다.

- 툴을 이용하여 리벳을 끼울 수 있습니다. 리벳을 툴에 끼운 상태로 플레이트 구멍에 넣고 핀을 누르면 됩니다.
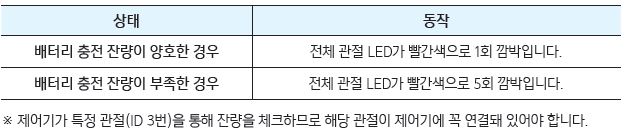
리튬이온전지의 배터리 잔량 체크
STEAMCUP MINI의 제어기 전원을 켜면 제어기가 배터리 잔량을 체크 합니다.
제품 이상유무 확인
제품 사용 시 아래와 같은 상황이 발생하면, 즉시 전원 스위치를 끄고 로보티즈 고객지원센터로 연락하시기 바랍니다.
- 제품에서 연기가 날 경우
- STEAMCUP MINI를 조립하고
관절 동작 테스트를 실행할 때 로봇 관절(다이나믹셀 XL-320)의 LED가 깜박이지 않는 경우 - 로봇에 물이나 이물질이 들어간 경우
- 로봇에서 이상한 냄새가 나는 경우
- 로봇이 파손된 경우
고객지원센터 070-8671-2622
시작하기
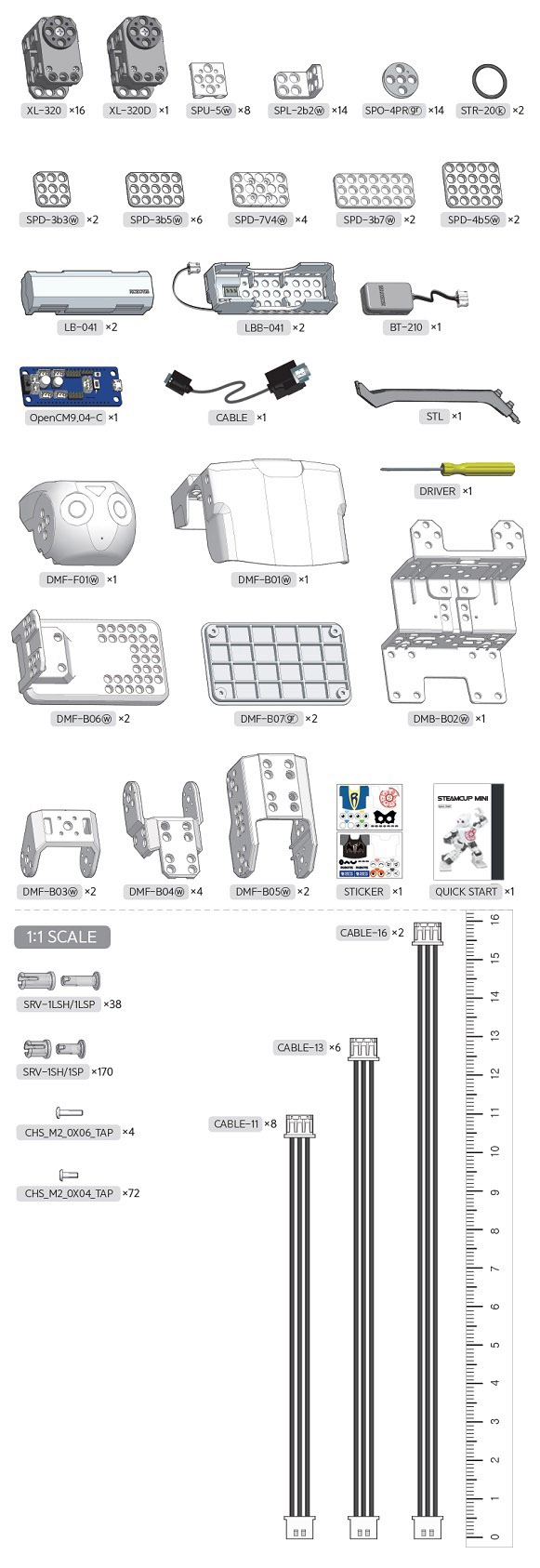
부품 목록
준비하기
로보티즈 미니 앱
STEAMCUP MINI는 스마트 기기를 사용하여 다양한 동작을 실행시킬 수 있는 전용 앱을 기본 제공하고 있습니다.
STEAMCUP MINI 전용 앱에 대한 설치 및 설정 방법, 동작 방법에 대해서는 STEAMCUP MINI 작동하기를 참조하세요.
STEAMCUP MINI 연결하기
PC에 STEAMCUP MINI의 블루투스 장치 추가하기
블루투스를 통해 STEAMCUP MINI를 PC와 연결하려면 PC에 블루투스 장치가 있어야 합니다.
내장된 블루투스 장치가 없을 경우 별도로 블루투스 동글을 구매하여 PC에 장착해야 합니다.
블루투스 장치가 있을 경우 아래와 같이 STEAMCUP MINI의 블루투스(BT-210)를 PC에 등록합니다.
(등록 방법은 Windows 7/8/8.1을 기준으로 설명합니다.)
Windows 8/8.1에서 제어판을 열기 위해서는 데스크톱 모드에서 오른쪽 참 바(Charm bar) > 설정 > 제어판을 선택하면 됩니다.
-
로봇에 블루투스(BT-210)를 연결하고 로봇의 전원을 켭니다.
-
PC의 제어판에
하드웨어 및 소리에서장치 추가를 선택합니다.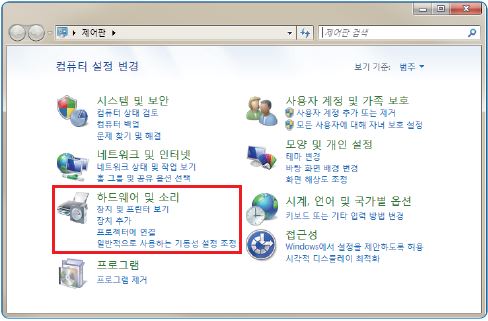
-
검색된 장치 중에 로봇에 연결한 블루투스(BT-210)를 선택하고
다음을 누릅니다.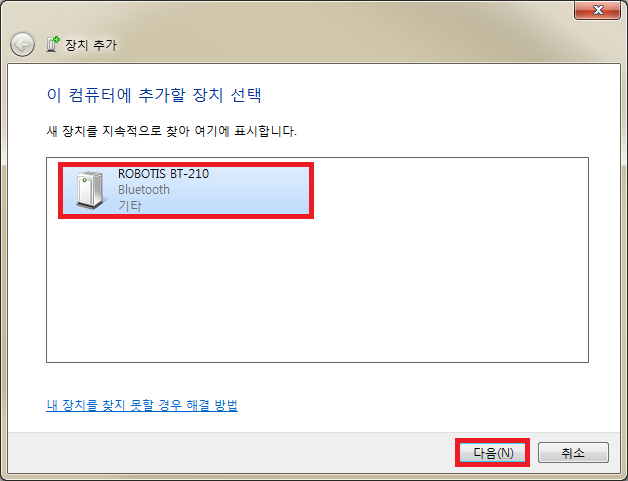
-
동일한 장치가 여러 개일 경우, 확인하려는 장치를 마우스의 오른쪽을 클릭하여 속성 메뉴에 들어 갑니다.
Bluetooth탭의고유 식별자가 블루투스(BT-210)의 상단에 적힌 번호와 일치하는지 확인하세요.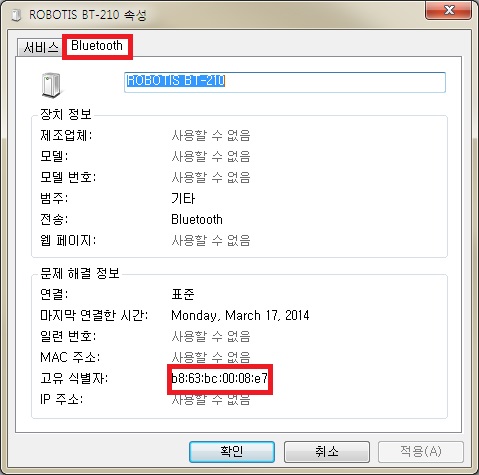
-
연결 옵션 중에
장치의 연결 코드 입력을 선택합니다.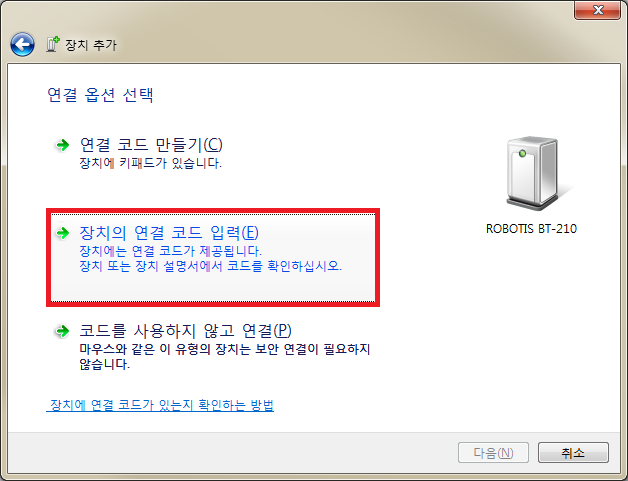
-
연결코드 입력란에
0000을 입력하고다음을 누릅니다.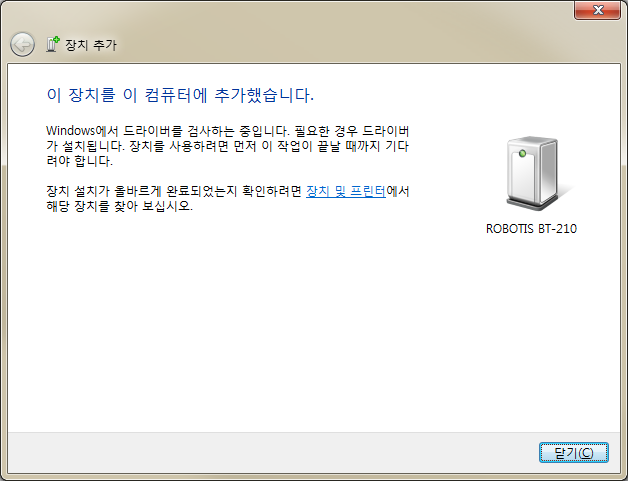
-
장치 추가가 완료되었습니다.
연결 포트번호 확인하기
-
PC의 제어판에
하드웨어 및 소리에서장치 및 프린터 보기를 선택합니다.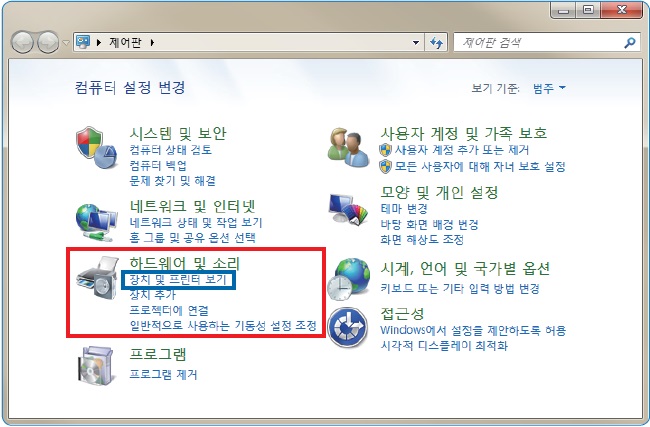
-
앞에서 연결한 장치를 마우스의 오른쪽을 클릭하여
속성메뉴를 선택합니다.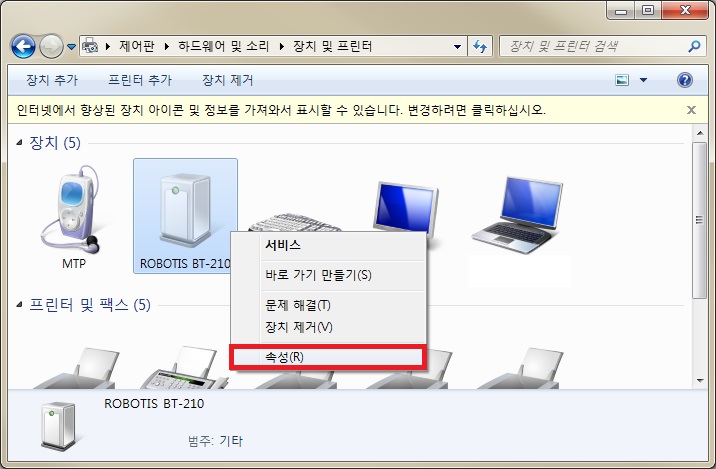
-
하드웨어탭에서 직렬 링크 COM 포트번호를 확인합니다.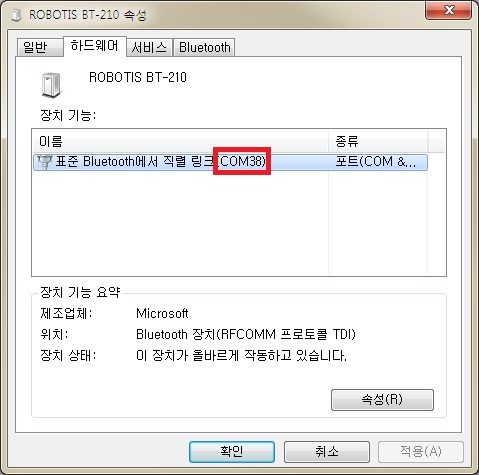
STEAMCUP MINI 작동하기
미니 앱 설치
소개 및 설치하기
STEAMCUP MINI는 스마트기기를 사용하여 다양한 동작을 실행시킬 수 있는 전용 앱을 기본 제공하고 있습니다. 전용 앱을 사용할 수 있는 스마트기기의 사양은 아래와 같습니다.
로보티즈 미니 앱 지원 사양
- 지원 OS : 안드로이드 2.3.3(진저브레드)이상
- 하드웨어 사양 : 1.2GHz 듀얼코어 이상, RAM 1GB 이상
IOS 기반의 스마트 디바이스 (아이폰/아이패드)에서 STEAMCUP MINI를 사용 하려면 BT-410을 별도로 구매해야 합니다.
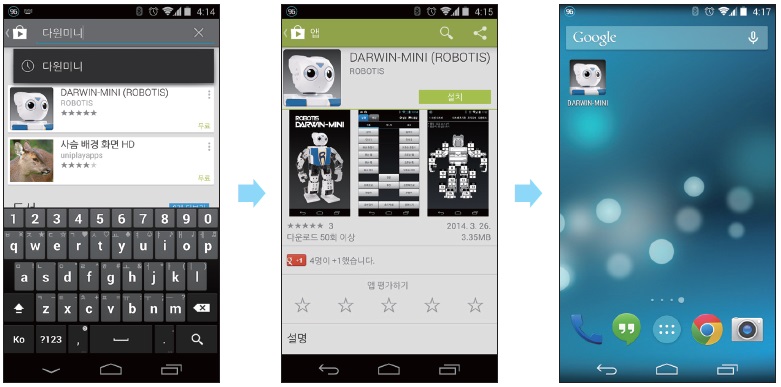
스마트 기기에서 Play 스토어를 실행합니다. (Play 스토어는 안드로이드 마켓 앱입니다.)
Play 스토어에서 로보티즈 미니 또는 로보티즈를 검색한 후 DARWIN-MINI 앱을 선택하여 설치합니다.
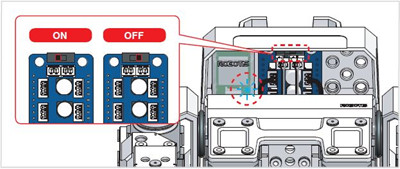
블루투스 장치 연결 확인하기
제어기의 전원 스위치를 켰을 때 블루투스(BT-210)의 LED가 깜박이면 로봇과 블루투스가 정상적으로 연결된 것입니다.
블루투스를 통해 로봇과 앱 연결하기
로보티즈 미니 앱 실행
- 로봇의 전원을 켜고 스마트기기에서 로보티즈 미니 앱을 실행합니다.
-
스마트기기의 블루투스가 꺼져 있는 경우, 아래와 같이 사용 여부를 확인하는 창이 표시됩니다.
허용을 터치하여 스마트기기의 블루투스 기능을 활성화합니다.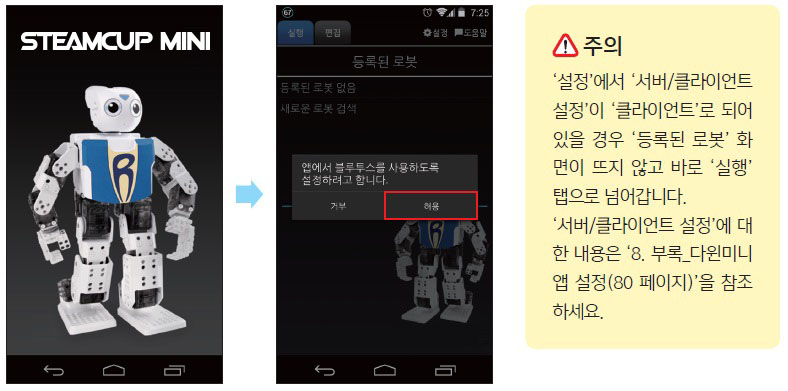
블루투스(BT-210) 연결 확인
등록된 로봇목록에서 STEAMCUP MINI에 연결된 블루투스(BT-210) 윗면의 번호와 동일한 번호가 있는지 확인합니다.-
만약 동일한 번호가 없으면
새로운 로봇 검색을 통해 찾아서 등록합니다.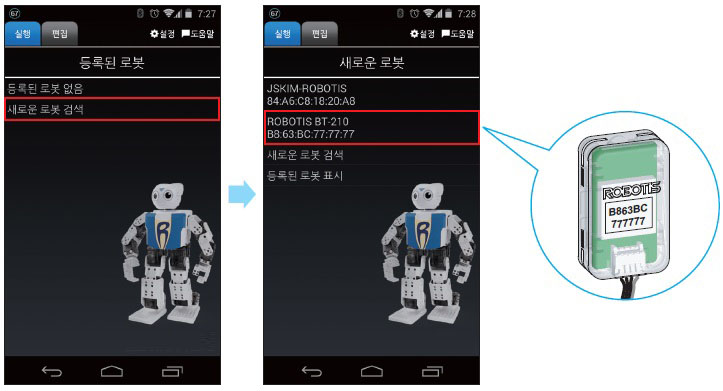
PIN 정보 입력
- 이때 장치와 연결(블루투스 페어링)을 위해서는 PIN 정보가 필요합니다. PIN은
0000으로 설정되어 있습니다. -
0000을 입력하고확인버튼을 누르면 로봇과 스마트기기가 연결되면서 왼쪽과 같은 화면이뜹니다.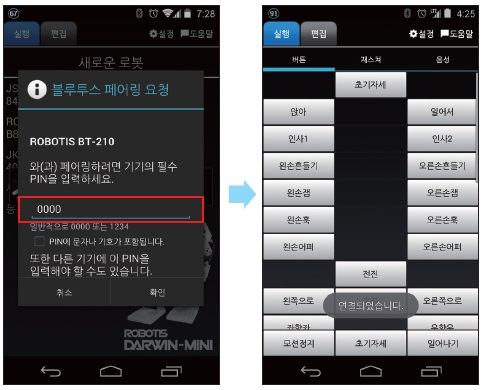
앱으로 조립 확인하기
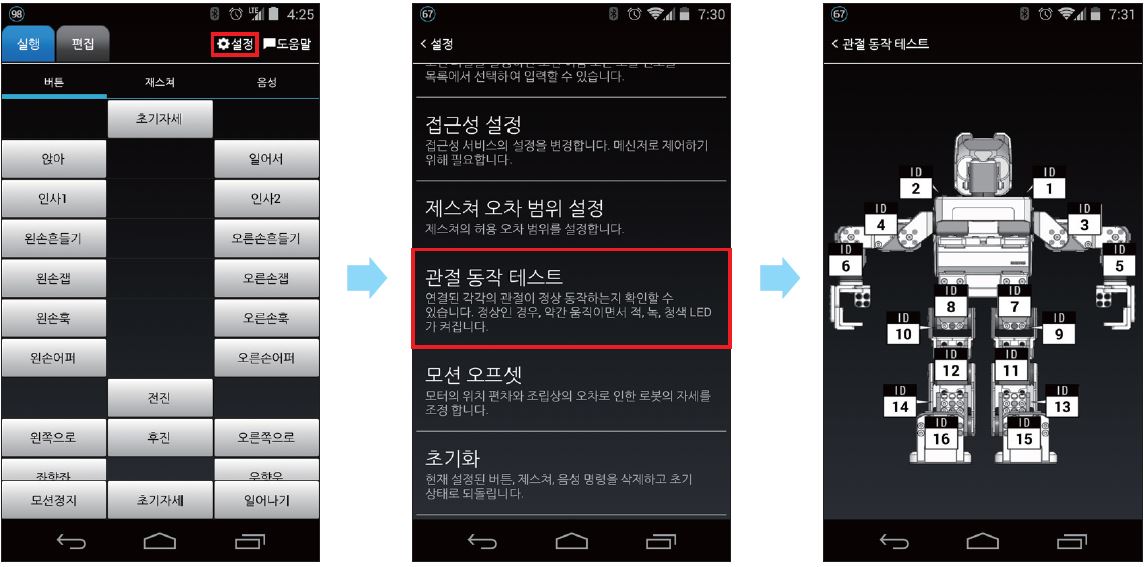
화면의 오른쪽 위에 설정 메뉴에서 관절 동작 테스트를 터치합니다. 스마트기기가 STEAMCUP MINI와 연결되어 있으면 다음과 같이 화면에 STEAMCUP MINI의 모습이 나타납니다.
블루투스 연결 상태와 각 관절에 이상이 없다면 각 ID를 터치했을 때 해당 관절이 약간 움직이고 LED가 빨강, 녹색, 파랑으로 차례대로 변하는 것을 확인할 수 있습니다.
만약 터치한 ID와 동작하는 관절의 위치가 맞지 않는다면 조립이 잘못된 것이므로, ID를 변경하거나 올바른 위치에 다시 조립을 해야 합니다.
미니 앱 사용하기
로보티즈 미니 앱은 스마트기기의 버튼, 제스처(센서), 음성 인식, 메신저 기능을 이용하여 STEAMCUP MINI의 동작을 실행시킬 수 있는 기능을 제공합니다.
- 버튼 : 화면의 버튼을 터치하여 STEAMCUP MINI를 동작시킬 수 있습니다.
- 제스처 : 스마트기기를 쥔 손으로 특정 제스처를 취하여 STEAMCUP MINI를 동작시킬 수 있습니다.
- 음성 인식 : 음성 인식 기능을 이용하여 STEAMCUP MINI를 동작시킬 수 있습니다.
- 메신저 : 다른 스마트기기에서 메신저를 통해 STEAMCUP MINI와 연결된 스마트기기로 동작 명령을 보내어 STEAMCUP MINI를 동작시킬 수 있습니다.
- 리모콘 : 격투게임이나 축구게임을 쉽게 할 수 있도록 스마트 기기의 화면을 가로방향의 리모콘 버튼으로 동작시킬 수 있습니다.
실행 탭의 버튼 / 제스처 / 음성 각 탭의 하단에는 3개의 기본 버튼이 제공됩니다.

각 버튼의 기능은 아래와 같습니다.
- 모션정지 : 모션 호출 번호 0번을 호출하는 버튼으로, 무한 반복 모션이나 실행시간이 긴 모션 실중에 이 버튼이 눌리면 현재 실행 중인 모션유닛까지만 실행하고 모션을 정지합니다.
- 초기자세 : 모션 호출 번호 1번을 호출하는 버튼으로, 기본 제공되는 모션 파일의 1번 모션은
초기자세입니다. 모션 파일의 1번 모션을 변경하면 변경된 모션이 호출됩니다. - 일어나기 : 모션 호출 번호 2번을 호출하는 버튼으로, 기본 제공되는 모션 파일의 2번 모션은
일어나기입니다. 모션 파일의 2번 모션을 변경하면 변경된 모션이 호출됩니다.
모션이 동작 중일 때에는 모션정지 외에 다른 모션을 실행하는 명령은 무시됩니다.
TIP :
- 모션 호출 번호가 0 일 경우, 실행중인 모션 유닛을 수행후 정지합니다.
- 모션 호출 번호가 -1 일 경우, 실행중인 모션 유닛을 정지후 모션종료 유닛을 실행합니다.
- 키프레임, 모션유닛, 모션에 대한 정보는 모션 데이터를 참조하세요.
버튼으로 동작하기
버튼 탭에 등록된 버튼을 터치하면 해당 버튼에 할당된 동작을 실행할 수 있습니다. 화면 상단의 편집 탭을 터치하면 버튼을 추가, 수정, 삭제하거나 위치를 변경할 수 있습니다.
- 버튼 줄 편집하기
-
버튼 줄 추가 :
편집탭에서버튼 추가를 터치하면 가장 위에 새로운 버튼을 한 줄 추가할 수 있습니다.
-
버튼 줄 순서 바꾸기 : 순서를 바꾸려는 버튼 줄의 오른쪽 끝을 터치하여 아래위로 드래그하세요.

-
버튼 줄 삭제 : 지우려는 버튼 줄의 오른쪽 끝을 터치하여 왼쪽으로 드래그하세요.

-
- 버튼 수정하기
-
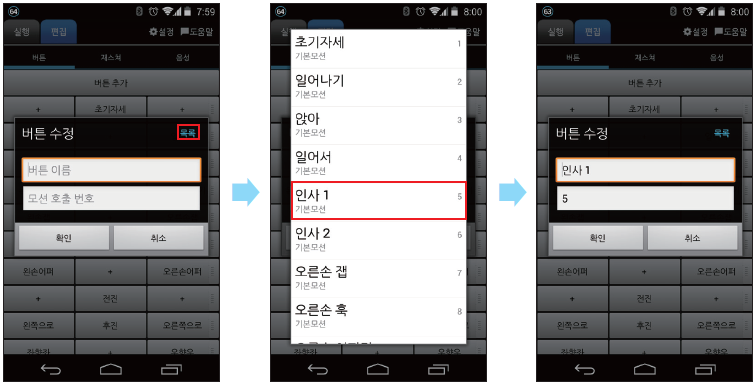
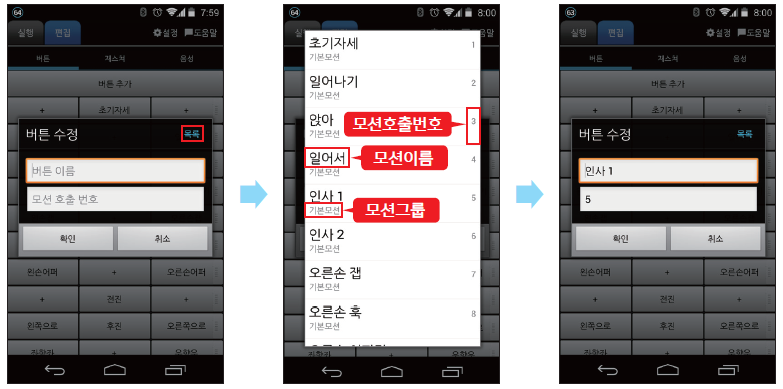
버튼 내용 수정 :
+로 표시된 버튼을 터치하면 해당 버튼에 새로운 내용을 등록할 수 있습니다. 이미 내용이 등록된 버튼을 터치하면 해당 버튼의 내용을 수정할 수 있습니다.
- 모션 호출 번호는 로봇에 다운로드된 각 모션들에 할당된 호출 번호입니다.
- 모션 호출 번호가 지정되지 않으면 버튼의 이름이 옅은 회색으로 표시됩니다.
- 버튼 이름과 모션 호출 번호를 모두 삭제하면 해당 버튼이
실행탭에 표시되지 않게 됩니다.
-
- 모션 파일 설정을 이용하여 모션 호출 번호 입력하기 : 로보티즈 미니 앱의
설정에서모션 파일 설정에 사용할 모션 파일을 지정해 두면 버튼 수정 화면에서 입력 창의 오른쪽 위에목록버튼이 보입니다. 이목록을 터치하면 설정된 모션 파일 내의 모션 목록이 나타납니다. 목록에서 원하는 모션을 선택하면 자동으로 버튼 이름과 모션 호출 번호가 입력됩니다.
파일 설정 방법은 모션파일 설정을 참고하세요.
제스처로 동작하기
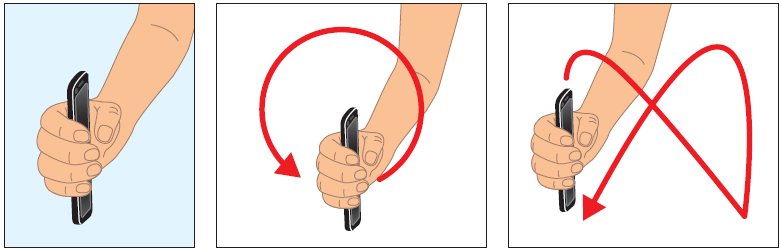
제스처 탭은 스마트기기의 가속도센서를 이용하는 기능으로 사용자가 스마트기기를 쥔 손으로 특정 제스처를 취하면 STEAMCUP MINI가 그에 맞는 동작을 취합니다. 예를 들어 스마트기기를 쥔 손으로 ◯를 그린다거나, X를 그리는 동작으로 STEAMCUP MINI를 걷거나 정지하게 할 수 있습니다. 기본 등록된 제스처와 기울기는 오른손으로 스마트기기를 바닥과 수직이 되도록 잡은 상태를 기준으로 동작합니다.
-
스마트기기를 쥔 손으로 미리 설정된 제스처를 취하여 로봇을 동작시킬 수 있습니다.
- 화면 중앙의 버튼을 터치한 상태로 스마트기기를 기울여서 로봇을 동작시킬 수 있습니다.
-
화면 아래의 있는 기본 버튼을 터치하면 버튼 탭으로 이동하지 않고도 버튼으로 로봇을 동작시킬 수 있습니다.
화면 맨 아래의
기울기를 터치하면 스마트기기를 기울이는 방향에 할당된 동작을 확인할 수 있습니다.
화면 상단의
편집탭을 터치하면 제스처를 추가, 수정, 삭제하거나 훈련 기능을 통해 인식 정확도를 높일 수 있습니다.
또한, 화면 아래의 버튼과 기울기 방향에 따른 동작도 수정할 수 있습니다. - 제스처 등록하기
제스처 추가버튼을 터치하면 제스처 추가 창이 뜹니다.- 제스처의 이름, 모션 호출 번호, 제스처 동작 설명 등을 입력합니다.
-
준비버튼을 누른 후 스마트기기를 쥔 손을 일정 속도 이상으로 움직이며 제스처를 취합니다.
-
움직임을 멈추면 짧은 진동과 함께 “삐” 소리가 나고,
제스처 ㅇㅇㅇ를 배웠습니다.라는 메시지가 표시되면서확인버튼이 활성화됩니다.
-
확인버튼을 터치하면 제스처 등록이 완료됩니다.“삐” 소리가 나지 않는다면 미디어 볼륨 크기를 확인하시기 바랍니다.
제스처를 추가할 때도 설정에서 모션 프로젝트 파일을 지정해 두었다면
목록버튼이 나타나서 쉽게 모션을 추가할 수 있습니다.
- 제스처 수정하기
- 수정하려는 제스처의
수정버튼을 터치합니다. - 등록할 때와 같은 방법으로 수정한 후
확인버튼을 터치하면 됩니다.
- 수정하려는 제스처의
- 제스처 삭제하기
- 버튼 줄 삭제와 동일하게 삭제하려는 제스처의 오른쪽 끝을 터치하여 왼쪽으로 드래그하면 됩니다.
- 버튼 수정하기
버튼탭의 버튼 수정 방법과 동일하게 수정하면 됩니다.- 화면 아래의 버튼은 최대 3개(1줄)까지만 추가 및 편집이 가능합니다.
- 기울기 편집하기
- 버튼 아래의
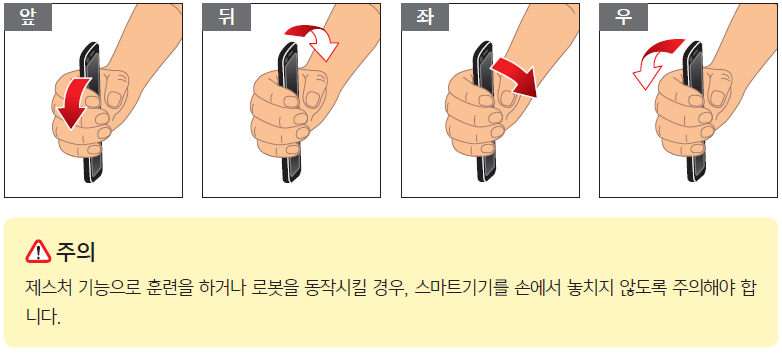
기울기를 터치하면 기울이는 방향에 따라 실행할 동작을 변경할 수 있습니다. 기울기기능에서 사용될 기울기 방향은 미리 정해진 4가지 방향만 사용할 수 있습니다.-
4가지 방향의 버튼을 터치하면 버튼의 이름과 모션 호출 번호를 편집할 수 있습니다.

미리 지정된 기울기의 방향은 아래 그림과 같이 오른손으로 스마트기기를 바닥과 수직이 되도록 잡은 자세로 앞, 뒤, 좌, 우로 기울인 방향입니다.
- 버튼 아래의
- 제스처 훈련 기능이란?
등록된 제스처의 인식률을 높이기 위해 각 제스처 별로 훈련 기능을 사용할 수 있습니다.- 훈련하려는 제스처의
훈련버튼을 터치합니다. 준비버튼을 터치한 후 훈련하려는 제스처의 동작을 더 크게 하거나 스마트기기의 방향이나 기울기를 다르게 하는 등의 방법으로 약간 변형하여 움직입니다.- 움직임을 멈추면 짧은 진동과 함께 “삐” 소리가 나고,
제스처를 배웠습니다.라는 메시지가 표시됩니다. - 같은 방법으로 비슷한 동작을 약간씩 변형하며 반복 학습시킵니다.
- 훈련하려는 제스처의
음성 인식으로 동작하기
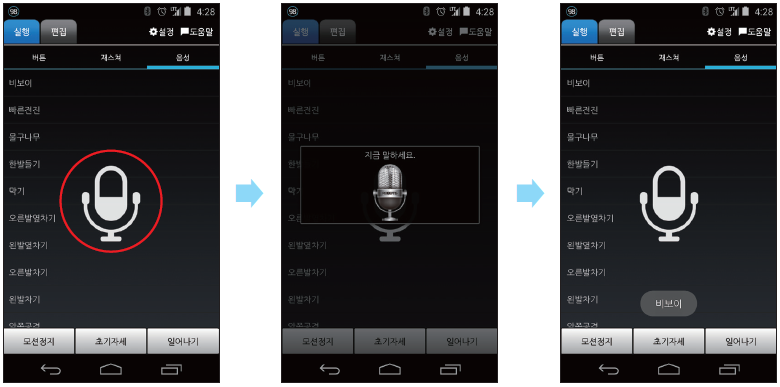
구글의 음성 인식 기능을 이용하여 STEAMCUP MINI를 동작시킬 수 있습니다.
화면 중앙의 마이크 모양 버튼을 터치한 다음 등록된 명령얼르 말하면 됩니다. 단, 음성 인식 기능을 이용하기 위해서는 스마트기기가 인터넷에 연결되어 있어야 합니다.
화면 상단의 편집 탭을 편집을 터치하면 음성명령을 추가, 수정, 삭제하거나 훈련 기능을 통해 정확도를 높일 수 있습니다.
- 음성명령 추가하기
음성명령 추가버튼을 터치하면 음성명령 추가 창이 뜹니다.-
음성 인식에 사용될 명령어와 모션 호출 번호를 입력하고,
확인버튼을 누르면 등록됩니다.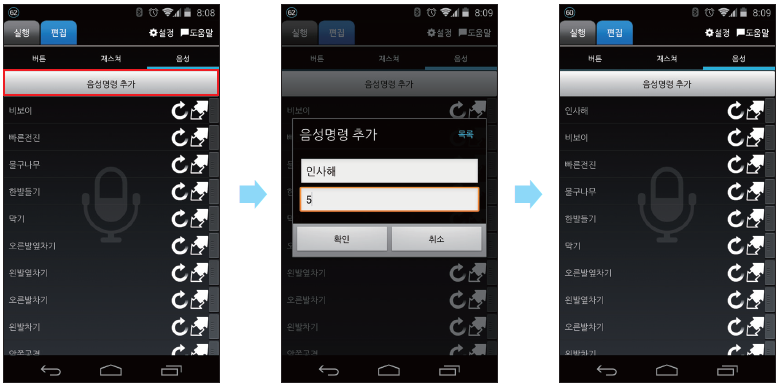
- 음성명령 수정하기
- 수정하려는 체스처의 음성명령을 선택하여
수정버튼을 터치합니다. - 새로운 음성명령이나 모션 호출 번호를 입력하고
확인버튼을 터치합니다.
- 수정하려는 체스처의 음성명령을 선택하여
- 음성명령 삭제하기
- 버튼 삭제와 동일하게 삭제하려는 명령의 오른쪽 끝을 터치하여 왼쪽으로 드래그합니다.
- 음성인식 훈련 기능이란?
등록된 음성명령의 인식률을 높이기 위해 각 명령어 별로 훈련 기능을 사용할 수 있습니다.- 훈련하려는 음성명령의
훈련버튼을 터치합니다. - 스마트기기의 마이크에 해당 음성명령을 말합니다.
-
음성 인식된 단어와 유사한 단어가 추천되어 나타납니다.
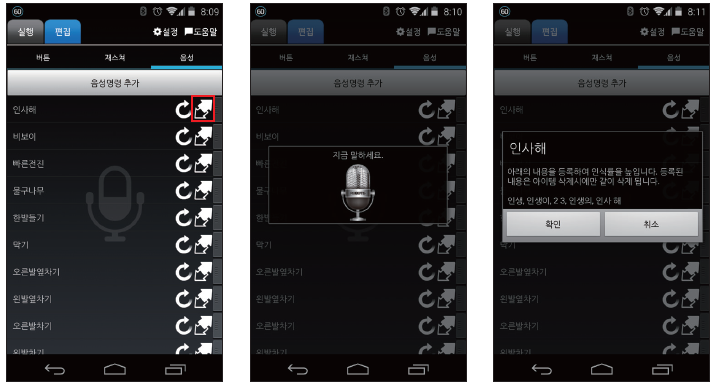
- ‘확인’ 버튼을 터치하면 추천된 유사 단어가 해당 음성명령에 추가로 등록됩니다.
주의 : 훈련 기능을 통해 추가된 유사 단어를 삭제하려면 해당 음성명령을 삭제하고 다시 등록해야 합니다.
- 훈련하려는 음성명령의
음성 인식 테스트 등록된 음성명령이 실제로 인식이 잘 되는지 확인하려면 실행 탭에서와 동일하게 화면 중앙의 마이크 모양의 버튼을 눌러 테스트할 수 있습니다. 그러나 편집 탭에서는 음성 인식의 성공율을 테스트하기 위함이므로 명령어의 인식 여부만 알려 줄 뿐, 실제로 STEAMCUP MINI에 동작 명령을 보내지는 않습니다.
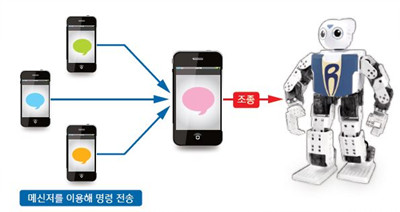
메신저로 동작하기
로봇과 연결된 스마트기기에서 각종 메신저를 이용해 동작명령을 보내면 로봇을 동작시킬 수 있습니다.
단, 이 기능을 사용하기 위해서는 메신저로 명령을 받을 수 있도록 스마트기기가 인터넷에 연결되어 있어야 합니다.
로보티즈 미니 앱이 실행중인 스마트기기에 각종 메신저를 통해 메시지가 들어오면 로보티즈 미니 앱에서 알림바에 표시되는 수신 메시지의 내용을 확인하여
음성명령에 등록된 명령어와 일치하는지 확인 후 일치할 경우 음성명령에 등록된 동작을 실행하게 됩니다.
음성명령에 등록된 명령을 그대로 사용하므로 메신저를 이용한 명령어 편집은 필요 없습니다.
주의 :
- 로보티즈 미니 앱이 알림바에 표시되는 메시지의 수신 내용을 확인할 수 있도록 접근성 설정을 켜 두어야 합니다.(접근성 설정 방법은 로보티즈 미니 앱 설정을 참조)
- 알림바에 메시지 수신 알람을 사용하지 않거나, 메시지의 수신 내용 전체를 표시하지 않고
새 메시지 개와 같이 표시하는 메신저에서도 동작하지 않을 수 있습니다.
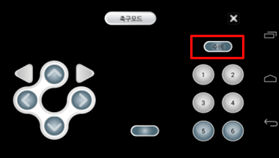
리모콘 사용하기
- 리모콘 형태로 배치된 버튼을 이용하여 STEAMCUP MINI를 조종할 수 있습니다.
- 화면 좌측의 버튼은 이동과 관련된 모션들이 설정되어 있습니다. 이 버튼들에 설정된 모션은 모드와 상관없이 공통적으로 적용됩니다.
- 화면 우측의 1 부터 6 까지의 버튼은 축구모드 공격, 축구모드 수비, 격투모드 에 따라 서로 다른 모션이 설정되어 있습니다.
총 18 개의 모션을 각각의 모드에 따라 설정할 수 있으며 모션이 설정되어 있지 않은 경우, 푸른색으로 표시됩니다. -
화면 상단의 버튼을 클릭하여 축구모드와 격투모드를 선택할 수 있습니다.

- 축구모드
-
축구모드는 수비와 공격을 선택할 수 있습니다.
-
초기 버튼 설정은 수비 시, 왼쪽막기(1), 오른쪽막기(2), 막기1(3), 막기2(4) 가 설정되어 있으며 공격 시, 왼발차기(1), 오른발차기(2), 왼발옆차기(3), 오른발옆차기(4) 가 설정되어 있습니다
-
- 격투모드
-
격투모드의 초기 버튼 설정은 왼쪽공격1(1), 오른쪽공격(2), 앞쪽공격(3) 이 설정되어 있습니다.

-
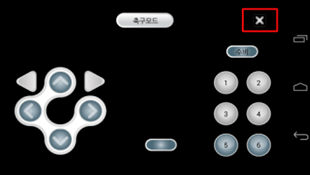
- 종료
-
리모콘 화면을 빠져나가기 위해서는 우측 상단의 x 버튼을 클릭합니다.
-
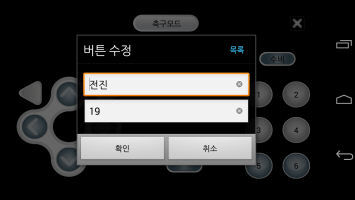
- 실행 & 편집
-
실행 모드에서 리모콘 탭을 실행하고 버튼을 클릭하면 STEAMCUP MINI를 조종할 수 있습니다.


-
편집 모드에서 리모콘 탭을 실행하고 이미지 버튼을 클릭하면 모션 설정을 변경할 수 있습니다.

-
미니 앱 설정
화면 오른쪽 상단의 ‘설정’을 누르면 앱의 설정 화면으로 넘어갑니다. 각 설정의 의미는 아래와 같습니다.
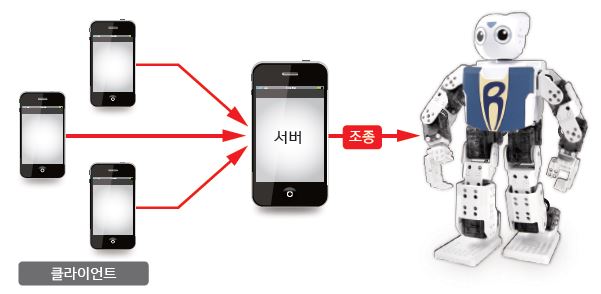
서버/클라이언트 설정
여러 대의 스마트기기로 하나의 STEAMCUP MINI를 조종할 경우에 설정합니다. 서버 역할을 하는 스마트기기만 STEAMCUP MINI와 직접 연결되고, 클라이언트 역할을 하는 다른 다수의 기기들은 서버에 연결되어 동작 명령을 서버 역할을 하는 기기로 보내고, 서버 역할을 하는 기기는 클라이언트들에서 들어온 동작 명령을 연결된 STEAMCUP MINI로 전달합니다.
서버/클라이언트 설정 기능을 사용하면 2대의 스마트기기에 한 대는 왼손 모션을, 다른 한 대는 오른손 모션을 제스처 명령으로 넣어두고, 각각 왼손과 오른손에 스마트기기를 하나씩 들고 양손으로 제스처를 취하며 STEAMCUP MINI를 조종하는 것과 같은 일을 할 수 있습니다.
이 기능은 모바일 네트워크(3G/4G/LTE 등)로는 사용할 수 없으며, 서버와 클라이언트 역할을 하는 스마트기기들이 모두 동일한 네트워크에 접속되어 있어야 합니다.
즉, 모두 동일한 공유기에 접속되어 있거나 혹은 한 대가 휴대용 Wi-Fi 핫스팟 기능을 켜고, 다른 기기들이 무선랜으로 이 스마트기기에 접속되어 있어야 합니다.
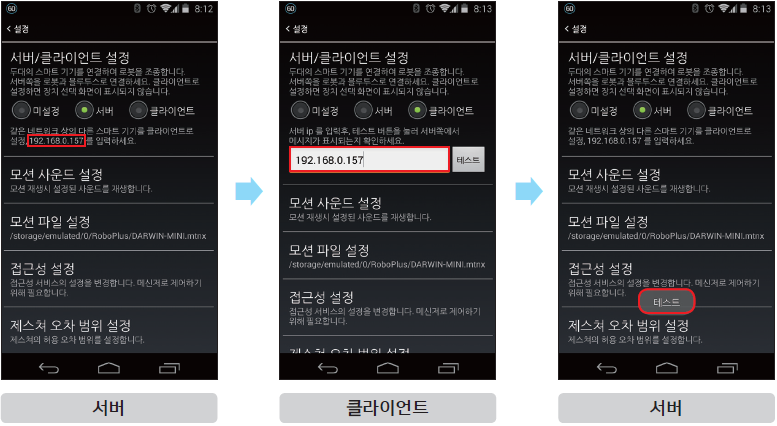
- 서버/클라이언트 설정하기
서버 역할을 하는 스마트기기만 STEAMCUP MINI 와 블루투스로 연결되므로 클라이언트로 설정된 스마트기기에서는 앱 실행 시 등록된 로봇 목록이 표시되지 않습니다.- 서버를 선택하면 현재 스마트기기의 IP Address가 표시됩니다.
- 이 주소를 클라이언트 역할을 하는 다른 스마트기기에 입력하고 테스트 버튼을 누릅니다.
-
정상적으로 설정된 경우 클라이언트 쪽의 ‘테스트’ 버튼을 눌렀을 때 서버 쪽에서 ‘테스트’ 메시지가 표시됩니다.
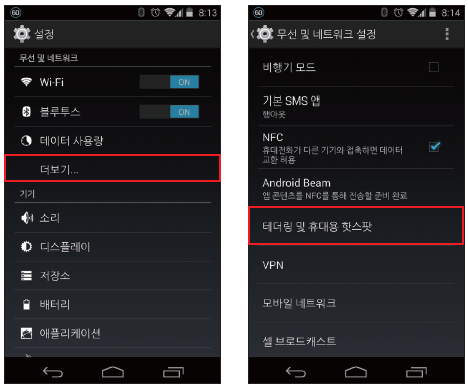
휴대용 Wi-Fi 핫스팟 설정 방법 : 설정 방법은 기기마다 아래의 화면과 다를 수 있습니다.
-
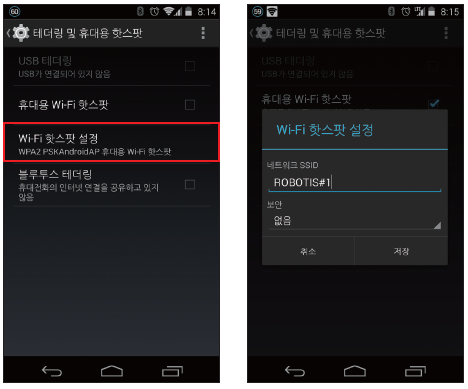
스마트기기 설정 메뉴의’무선 및 네트워크 설정’→ ‘테더링 및 휴대용 핫스팟’ → ‘휴대용 Wi-Fi 핫스팟’ 체크를 통해 설정합니다.
-
‘Wi-Fi 핫스팟 설정’ 메뉴를 통해 다른 스마트기기에 표시되는 이름을 변경할 수 있습니다.
이 기능을 통해 다른 스마트기기들이 연결되면, 연결된 모든 스마트기기의 데이터 통신이 이 기기를 통해 이루어지므로, 휴대용 핫스팟에 연결된 상태로 인터넷 연결 등 데이터를 많이 사용하게 될 경우 요금제에 따라 데이터 요금이 과다하게 청구될 수 있으니 주의하시기 바랍니다.
모션 사운드 설정
모션 호출 번호에 사운드 파일을 설정해 두면 해당 모션 번호가 실행될 때 설정된 사운드가 함께 재생됩니다. 이 기능은 댄스 모션 실행 시 자동으로 스마트기기로 음악을 재생시키는 등의 용도로 사용할 수 있습니다.
‘사운드 추가’ 버튼을 터치한 후 모션 호출 번호와 사운드 파일을 선택하여 등록합니다. 등록된 사운드 목록에서는 사운드 파일을 재생해 보거나 수정 및 삭제를 할 수 있습니다.

모션파일 설정
버튼 / 제스처 / 음성명령 등을 추가할 때 입력하는 모션 호출 번호는 STEAMCUP MINI에 다운로드한모션그룹에 포함된 모션들에 대한 각각의 호출 번호를 의미합니다.
명령 추가 시에 모션 편집 프로그램을 이용하여 모션 파일을 열고 로보티느 미니에 다운로드한 모션그룹에 속한 모션들에 대해 일일이 모션 이름과 모션 호출 번호를 확인하고 입력하는 것은 상당히 번거로운 일입니다. 따라서 이를 보다 쉽게 입력할 수 있도록 하기 위해 해당 모션 파일을 ‘모션 파일 설정’ 옵션에 등록합니다. 로보티즈 미니에 제공되는 기본 모션 파일이 초깃값으로 지정되어 있습니다.
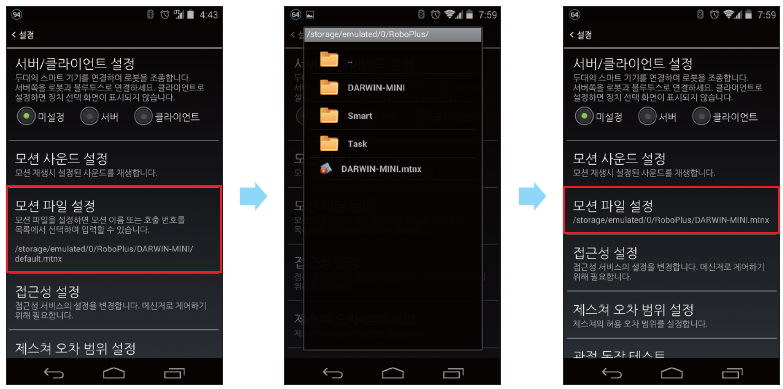
이렇게 로보티즈 미니에 다운로드한 모션 파일을 지정해 두면, 모션 호출 번호를 입력하는 창의 오른쪽 위에 ‘목록’ 이라는 버튼이 보이게 되고, 해당 버튼을 터치하면 지정한 모션 파일을 분석하여 포함된 모든 모션 호출 번호가 목록으로 나타납니다.
그 중 하나의 모션을 선택하면 자동으로 모션 이름과 모션 호출 번호가 입력됩니다.
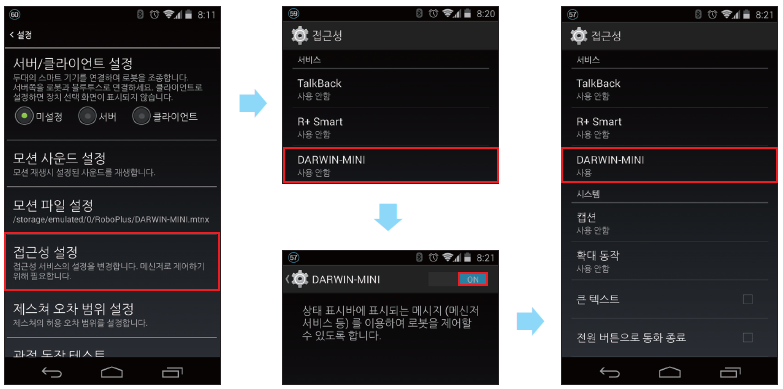
접근성 설정
접근성 설정은 ‘로보티즈 미니 동작하기’의 ‘메신저로 동작하기’ 기능을 사용하기 위해 필요한 설정입니다. 메신저로 수신한 메시지가 음성명령에 등록된 명령과 일치하는지 확인하려면 로보티즈 미니 앱이 메신저로 수신한 메시지의 내용에 접근할 수 있어야 합니다.
접근성 설정을 활성화하면 메신저가 수신한 메시지의 내용을 알림바에 표시할 때 로보티즈 미니 앱도 그 내용을 받아볼 수 있게 됩니다.
따라서 접근성 설정을 비활성화하면 메신저로 받은 메시지의 내용을 로보티즈 미니 앱이 받아볼 수 없게 되어 메신저로 STEAMCUP MINI를 동작시키는 기능을 사용할 수 없습니다.
이 설정은 ‘서버/클라이언트 설정’과 달리 메신저를 이용하기 때문에 로봇과 연결된 스마트기기가 다른 스마트기기와 동일 네트워크에 연결되어 있지 않더라도
인터넷만 연결가능하면 다른 스마트기기에서 STEAMCUP MINI를 동작시킬 수 있습니다.
환경설정의 접근성 설정을 터치 할 때 나타나는 접근성의 서비스 항목에 표시되는 목록 중 DARWINMINI를 선택하여 사용할 수 있도록 설정을 변경합니다.
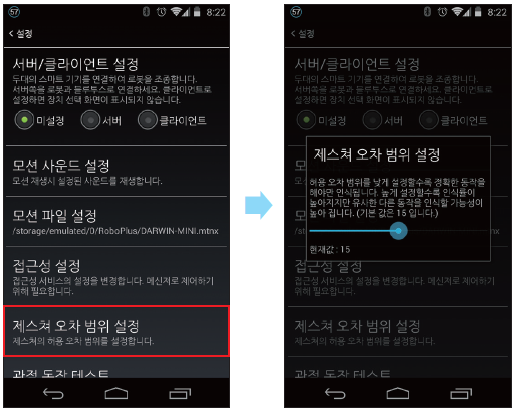
제스처 오차 범위 설정
제스처 기능을 이용할 때, 동작을 인식하는 정확도를 조정하기 위한 설정입니다. 오차 범위를 작게 설정할수록 정확한 동작을 해야 인식하며, 크게 설정할수록 인식률은 높아지지만 다른 동작으로 인식될 확률도 높아집니다.
제스처 기능에 대해서는 STEAMCUP MINI 동작하기를 참고하세요.
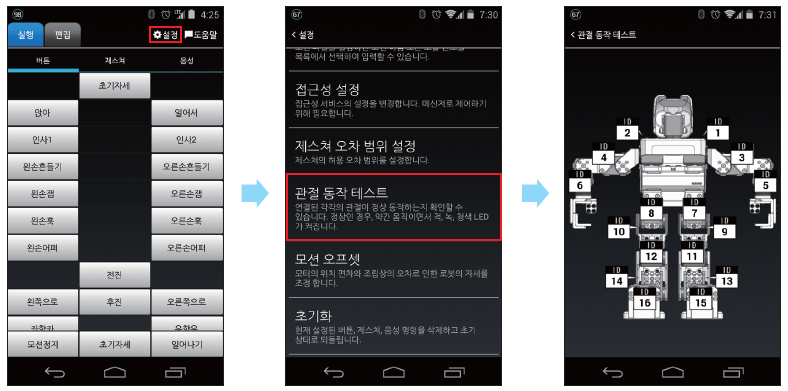
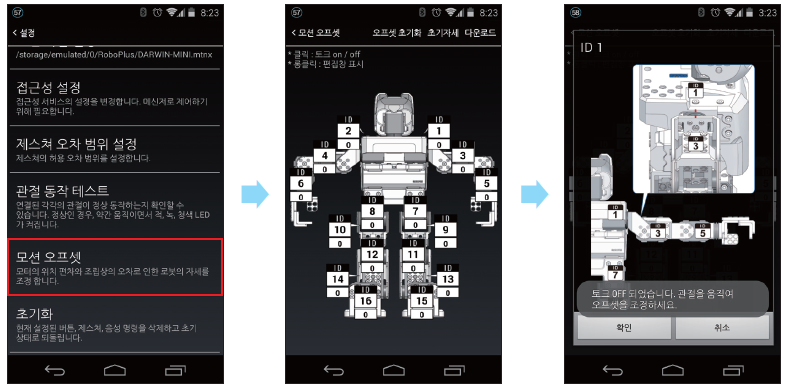
관절 동작 테스트
화면의 오른쪽 위에 ‘설정’ 메뉴에서 ‘관절 동작 테스트’를 터치합니다. 스마트기기가 STEAMCUP MINI와 연결 되어 있으면 다음과 같이 화면에 STEAMCUP MINI의 모습이 나타납니다.
블루투스 연결 상태와 각 관절에 이상이 없다면 각 ID를 터치했을 때 해당 관절이 약간 움직이고 LED가 빨강, 녹색, 파랑으로 차례대로 변하는 것을 확인할 수 있습니다.
만약 터치한 ID와 동작하는 관절의 위치가 맞지 않는다면 조립이 잘못된 것이므로, ID를 변경하거나 올바른 위치에 다시 조립을 해야 합니다.
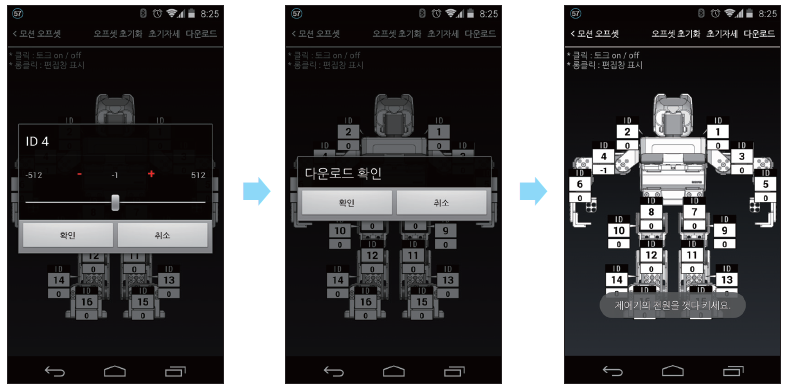
모션 오프셋
오프셋이란 기준값에 대한 차이를 의미합니다. 같은 로봇이라도 조립상의 오차와 모터의 편차로 인해 자세의 차이가 조금씩 생길 수 있습니다. 모션 오프셋에 이 차잇값을 설정해 두면 모션 실행 시에 차잇값 만큼을 항상 적용하여 보정할 수 있습니다.
-
STEAMCUP MINI 초기 자세
‘모션 오프셋’ 메뉴로 들어가면 STEAMCUP MINI에 저장된 오프셋값을 읽어오며 로보티즈미니에 오프셋을 적용한 초기 자세로 만들어 줍니다. 이때 STEAMCUP MINI가 취하는 초기 자세는 아래와 같습니다.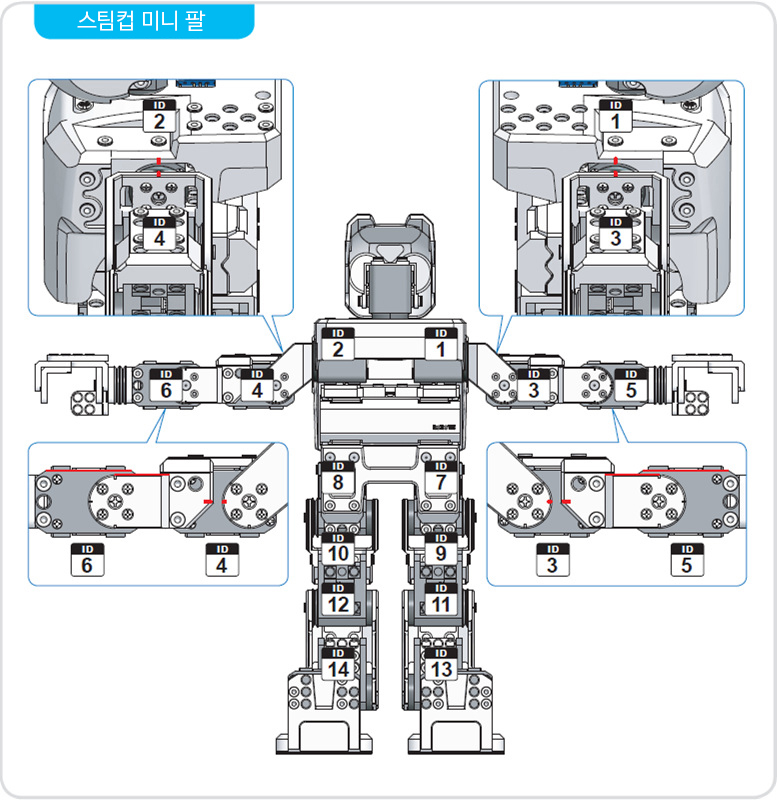
만약 각 관절의 위치가 앞의 그림에서와 같이 일치하지 않고 삐뚤어져 있는 관절이 있다면 관절의 토크 ON/OFF 기능을 이용하여 관절의 위치를 수정해 줍니다.
주의 : 관절의 정확한 위치를 확인하기 위해서는 반드시 STEAMCUP MINI를 들고 확인하시기 바랍니다. 바닥에 세워 둔 채로 확인할 경우 로봇 자체의 무게로 인해 다리나 허리 관절의 위치가 틀려질 수 있습니다.
각 관절의 ID를 터치하게 되면 해당 관절의 토크가 OFF되면서 해당 관절을 임의대로 움직일 수 있게 됩니다.
또한 화면에는 ID와 함께 해당 관절의 정위치를 표시하는 그림이 나타납니다. 그림을 참고하여 직접 관절을 움직여서 정위치까지 움직이고, ‘확인’ 버튼을 누르면 토크 ON 상태가 되면서 해당 관절의 현재 위칫값을 읽어서 자동으로 오프셋값을 계산하여 화면에 표시해 줍니다.
이때 손으로 움직이는 것으로 정확한 위치를 잡기가 어려울 경우 해당 ID를 길게 터치하면 해당 액츄에이터가 토크 ON이 되어 슬라이드 바를 움직이거나 +, - 버튼을 이용하여 오프셋값을 세밀하게 조정할 수 있습니다.
- 상단의 ‘오프셋 초기화’ 버튼을 터치하면 모든 관절의 오프셋값이 ‘0’이 됩니다.
- 상단의 ‘초기자세’ 버튼을 터치하면 현재 편집 중이던 오프셋값은 버리고, STEAMCUP MINI에 저장된 오프셋값을 다시 읽어와서 오프셋을 적용한 초기자세를 취하게 됩니다.
변경한 오프셋을 STEAMCUP MINI에 적용하기 위해서는 제어기로 다운로드해야 합니다. 오른쪽 위의 다운로드 버튼을 눌러 STEAMCUP MINI로 다운로드할 수 있습니다.
초기화
STEAMCUP MINI를 조종하기 위한 버튼, 제스처, 음성명령들을 초기화 상태로 되돌립니다.
로봇 프로그래밍
로보플러스 태스크
어떤 일을 처리하기 위한 행동들의 집합을 태스크(Task)라고 합니다.
로봇이 해야 할 태스크를 프로그래밍한 소스를 RoboPlus에서는 태스크 코드(Task Code)라고 합니다.
로봇은 사용자가 작성한 태스크 코드에 따라 동작하게 되며, 이러한 태스크 코드를 쉽게 작성할 수 있도록 도와주는 것이 로보플러스 태스크 프로그램입니다.
로보플러스 태스크 다운로드 및 사용법
로보플러스 태스크 프로그램은 로보티즈 홈페이지의 다운로드 게시판에서 받으실 수 있습니다. 또한 로보플러스 태스크의 자세한 사용법은 e-매뉴얼에서 확인하실 수 있습니다.
태스크 프로그래밍 예제
STEAMCUP MINI를 제어하는 프로그래밍 예제로, 오른팔을 잡고 움직이면 왼팔이 똑같이 따라 움직이는 프로그램을 태스크로 작성하면 아래와 같습니다.
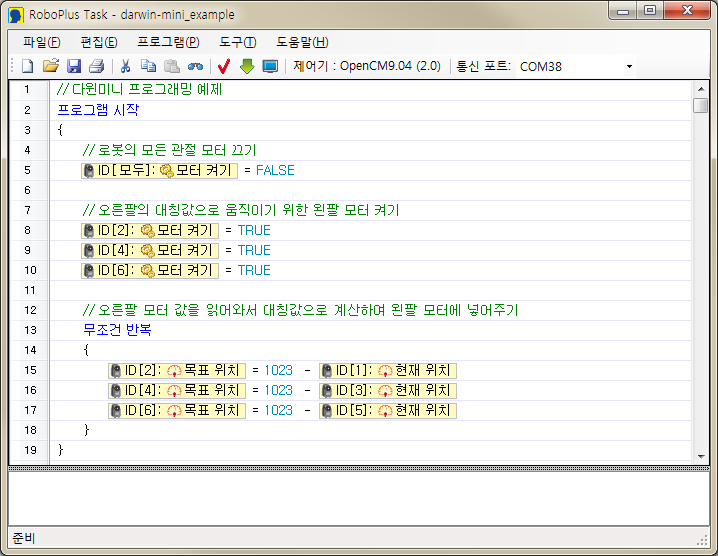
작성된 예제 파일은 다운로드에서 받으실 수 있습니다.
태스크 코드 다운로드
작성한 태스크 코드를 STEAMCUP MINI에 다운로드합니다. 다운로드를 하게 되면 제어기 내부에 태스크 코드를 저장하므로 한 번만 수행하면 됩니다.
- PC와 제어기가 연결되어야 합니다. 앞에서 설명한
PC에 STEAMCUP MINI의 블루투스 장치 추가하기를 통해 STEAMCUP MINI의 블루투스를 PC에 등록합니다. -
STEAMCUP MINI가 연결된 포트를 확인하고, 해당 포트를 선택합니다.
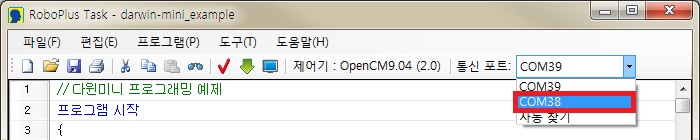
만약, 통신 포트를 모른다면
자동 찾기를 선택합니다.
이때 로보플러스 태스크가 제어기를 찾지못하면 아래와 같은 에러 메시지가 나타납니다. 안내에 따라 점검 후 다시 시도하세요.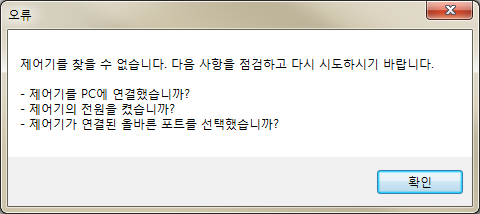
-
프로그램 다운로드 메뉴를 선택합니다.(단축키 F6)

만약 프로그램에 오류가 있다면 오류를 찾아 수정해야 합니다. (프로그램 하단의 룰 체크 에러 메시지 확인)
-
다운로드를 진행합니다. 만약 다운로드에 실패했다면 처음부터 다시 시도합니다.
- STEAMCUP MINI의 제어기 전원을 껐다가 켜면 다운로드된 태스크 코드가 자동으로 실행됩니다. 로봇이 프로그래밍한 대로 동작하는지 확인합니다.
로보플러스 모션
모션 데이터란, 로봇이 의미 있는 행동을 하기 위해 필요한 관절별 모터의 위치와 속도 데이터의 집합을 의미합니다. 로봇이 움직이기 위해서는 모션 파일이 필요하며, 로봇에 맞는 모션 파일을 다운로드해야 합니다.
앞서 로보플러스 태스크를 이용하여 작성한 태스크 코드(Task Code)는 프로그램이고, 모션 파일은 데이터입니다.
태스크 코드로 로봇의 행동을 결정하고, 그 결정에 따라 로봇이 일정한 동작을 하게 하기 위해서는 모션 데이터가 필요합니다.
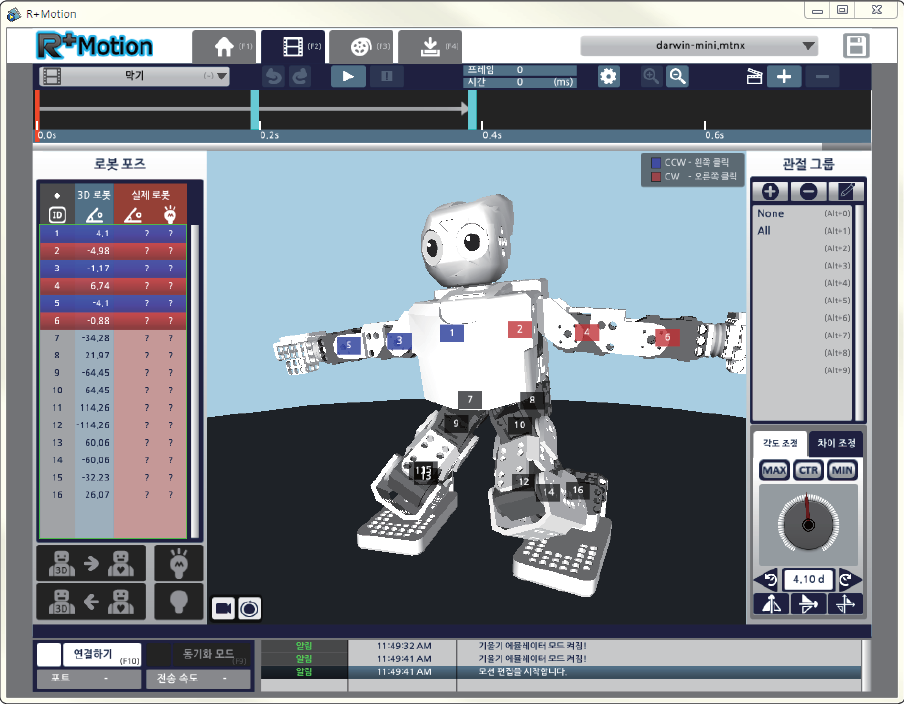
실제 로봇을 연결하거나 3D 로봇을 이용하여 로봇의 모션 데이터를 쉽게 만들 수 있도록 도와주는 것이 로보플러스 모션 프로그램입니다.
로보플러스 모션 다운로드 및 사용법
로보플러스 모션 프로그램은 로보티즈 홈페이지의 다운로드 게시판에서 받으실 수 있습니다.
또한 로보플러스 모션의 자세한 사용법은 e-매뉴얼에서 확인하실 수 있습니다.
로보티즈 홈페이지다운로드 게시판e-매뉴얼로보플러스 모션 사용법
STEAMCUP MINI 기본 모션 파일
STEAMCUP MINI에 기본으로 제공되는 예제 모션 파일도 다운로드에서 받으실 수 있습니다. 예제 모션 파일을 로보플러스 모션 사용법을 참고하여 수정해 보세요.
모션 파일 다운로드
수정한 모션 파일을 로보티즈 미니 앱이나 태스크 코드에서 활용할 수 있도록 로봇에 다운로드합니다. 모션 데이터도 다운로드를 하게 되면 태스크 코드와 마찬가지로 제어기 내부에 저장되므로 한 번만 수행하면 됩니다.
- PC와 제어기가 연결되어야 합니다. 앞에서 설명한
PC에 STEAMCUP MINI의 블루투스 장치 추가하기를 통해 STEAMCUP MINI의 블루투스(BT-210)를 PC에 등록합니다. -
프로그램 좌측 하단에
연결하기버튼을 클릭합니다.
-
사용할 포트를 선택하고 연결 버튼을 클릭합니다. 만약, 통신 포트를 모른다면
자동 연결버튼을 클릭합니다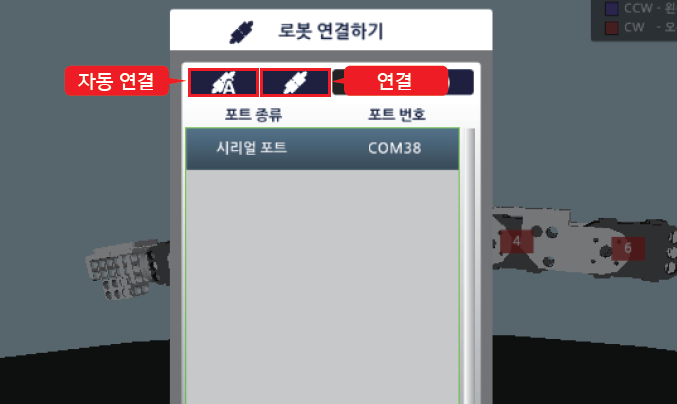
-
연결에 성공하면 왼쪽 하단에 연결된 포트와 전송 속도가 표시됩니다.

-
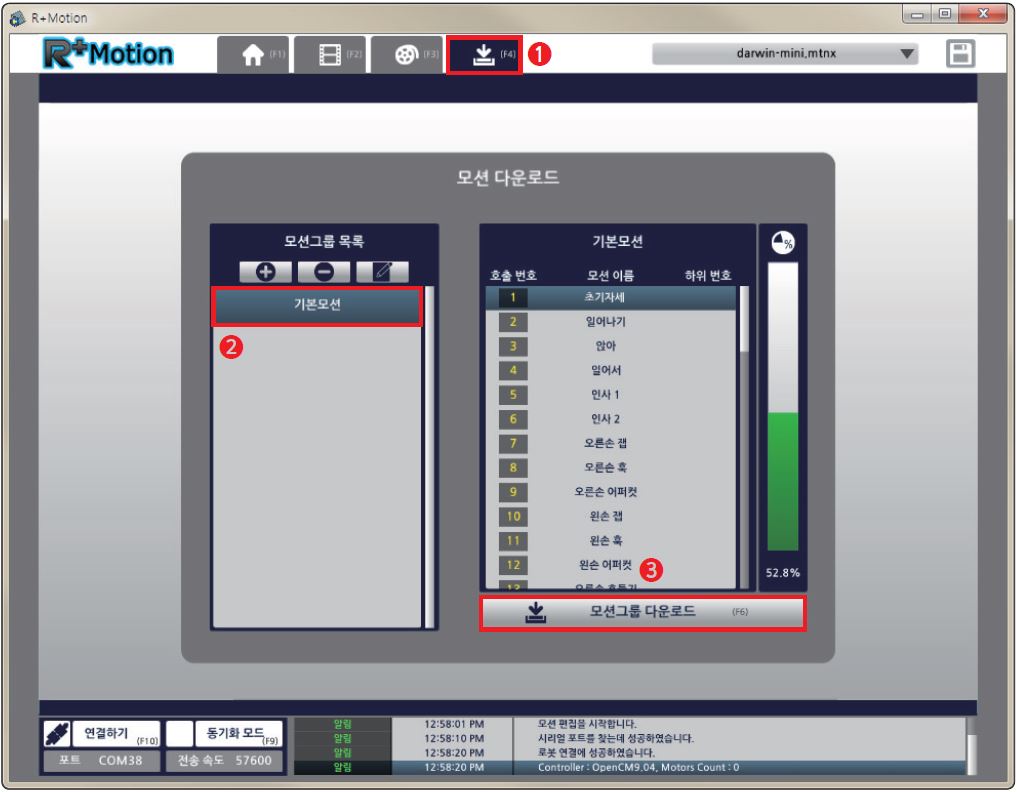
모션 데이터 다운로드를 위해 상단의 마지막 탭인 모션 다운로드 탭으로 이동하여 STEAMCUP MINI에 다운로드할 모션그룹을 선택하고, 모션그룹 다운로드 버튼을 클릭합니다.
-
진행율이 표시되면서 다운로드가 진행되고, 다운로드가 성공적으로 완료되면 하단의 로그 창에 다운로드 성공 메시지가 나타납니다.

- 로보티즈 미니 앱이나 태스크 코드를 통해 수정한 모션을 실행하여 동작이 수정한 대로 이루어지는지확인합니다.
나만의 STEAMCUP MINI 꾸미기
추가 부품 장착하기
STEAMCUP MINI의 제어기인 OpenCM9.04-C Type은 5핀 다목적 포트를 통해 다음과 같은 장치들을 추가 장착할 수 있습니다.
-
추가부품

※ 추가 장치 별매 : 로보티즈 쇼핑몰
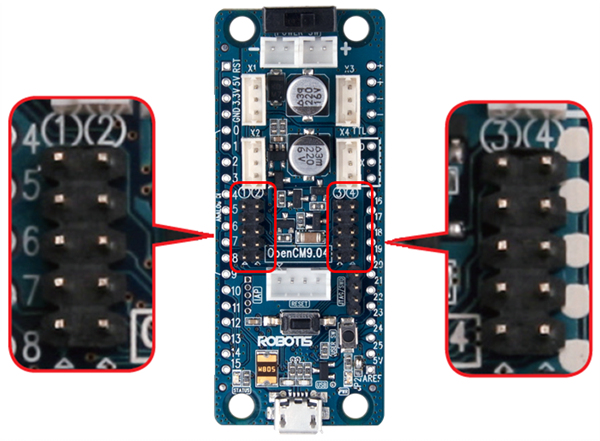
각 포트 번호는 포트 상단에 흰색 숫자로 표시되어 있습니다.
주의:
- LED모듈의 경우
1번과4번 포트에 연결할 경우 주황색 LED가 켜지지 않으므로2번과3번 포트를 이용하세요. - 적외선센서는
1번과4번 포트를 이용하세요. - 컬러센서는
2번과3번 포트를 이용하세요.
-
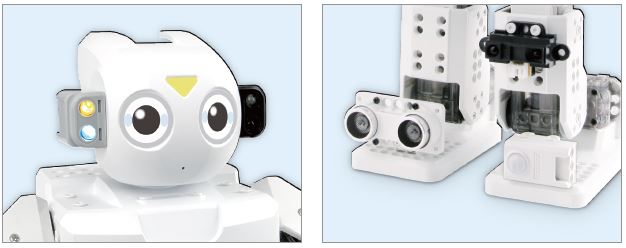
다양한 추가 장치 장착 예제
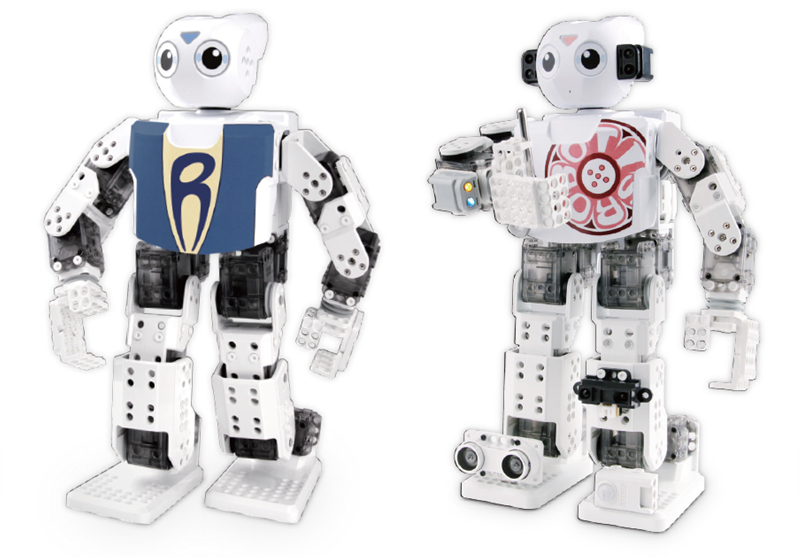
외형 꾸미기
꾸미기 스티커를 이용하여 STEAMCUP MINI의 얼굴과 몸을 꾸며 보세요. 빈 스티커에 그림을 직접 그려서 나만의 눈과 옷을 만들 수 있어요.
-
꾸미기 스티커 이미지는 다운로드에서 찾을 수 있습니다.
다운로드
다운로드태스크 및 모션 예제 다운로드다운로드꾸미기 스티커 다운로드다운로드3D 프린터용 STL 파일다운로드설계용 STP 파일다운로드STEAMCUP MINI 조립서
STEAMCUP MINI 관리하기
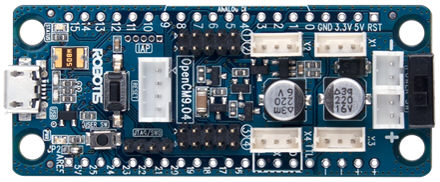
STEAMCUP MINI 제어기 펌웨어 업데이트
STEAMCUP MINI의 제어기(OpenCM9.04C) 펌웨어를 복구하거나 업데이트 하려면 아래 순서대로 진행하시면 됩니다.
-
먼저 STEAMCUP MINI 가슴 부분을 몸체와 분리하여 제어기를 분리 합니다.
-
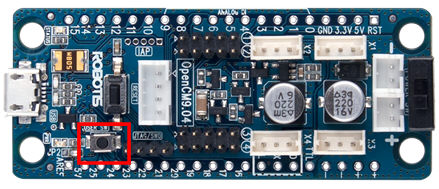
전원이 꺼진 상태에서 표시 된 부분의 사용자 버튼을 누릅니다.
-
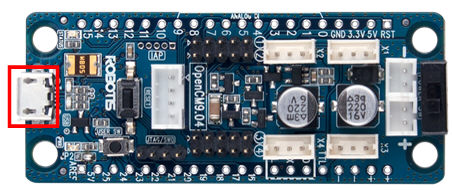
사용자 버튼이 눌린 상태에서 표시된 부분에 mini USB 케이블로 OpenCM9.04C와 PC를 연결합니다.
-
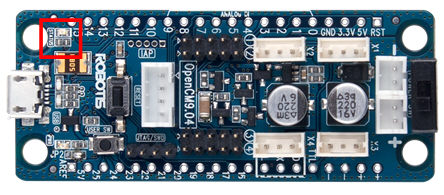
표시된 부분에 녹색 LED가 켜지면 사용자 버튼에서 손을 뗍니다.
-
RoboPlus를 실행합니다. 버전이 낮을 경우 인터넷에 연결하여 자동업데이트가 실행됩니다. 자동업데이트가 불가능 할 경우에는 로보티즈 다운로드 게시판에서 최신버전을 설치하도록 하세요.
-
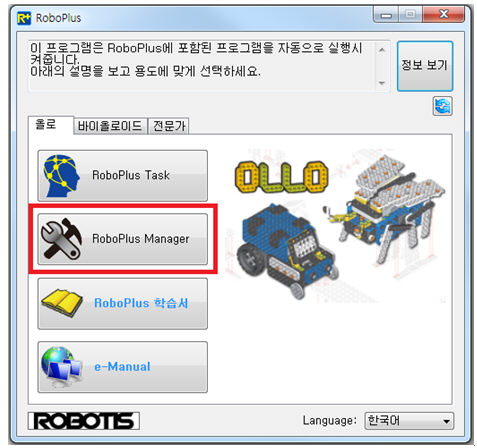
R+ Manager (1.0.32.0 이상 버전) 를 실행합니다.
-
로보 플러스의 우측 상단 업데이트 버튼을 클릭하여 최신버전으로 업데이트 합니다.

-
만약 업데이트 사항이 있다면 R+ Manager를 종료하고 다시 실행하세요.
-
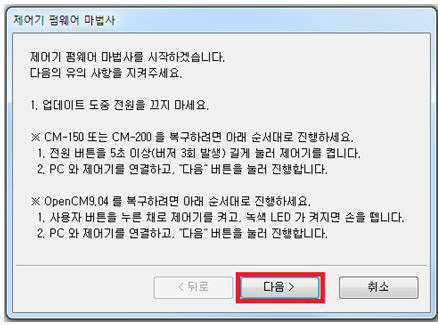
상단 메뉴중 제어기 복구 버튼을 클릭합니다.

-
[다음]을 클릭합니다.
-
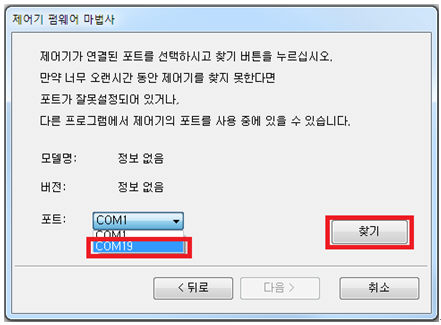
OpenCM9.04C가 연결된 COM포트 번호를 선택하고 [찾기]를 클릭합니다.
-
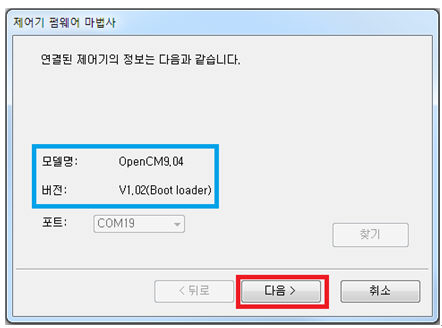
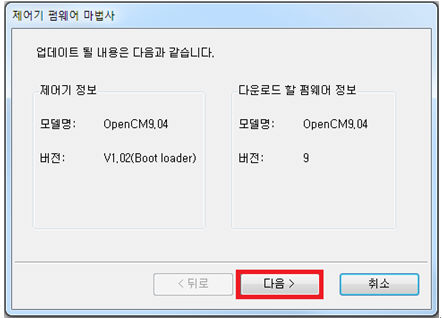
제어기를 찾으면 [다음]버튼을 클릭합니다.
-
[다음]버튼을 클릭합니다.
-
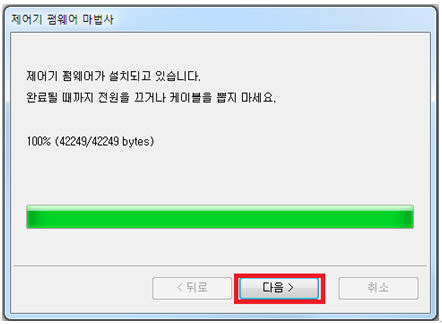
[다음]버튼을 클릭합니다.
-
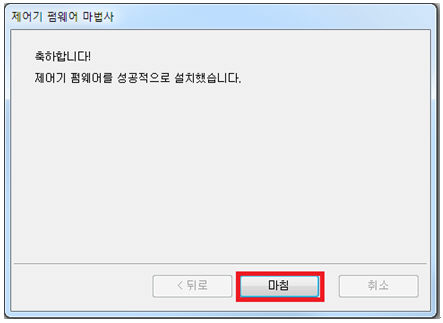
[마침]버튼을 클릭합니다.
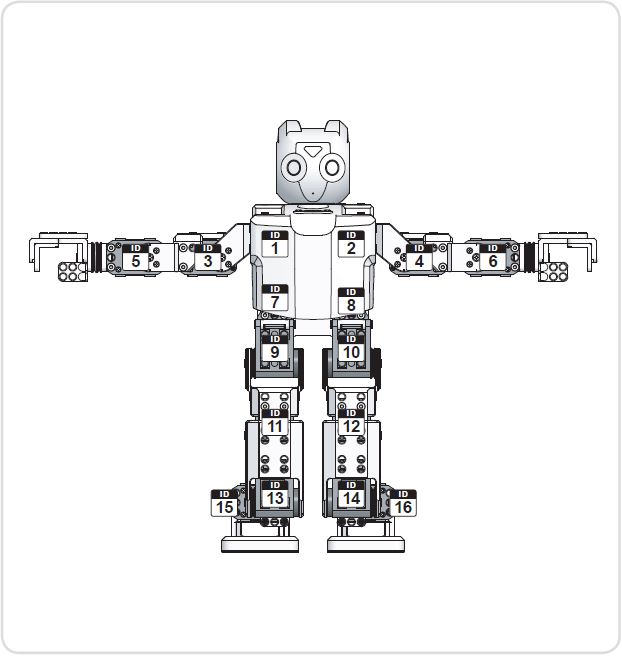
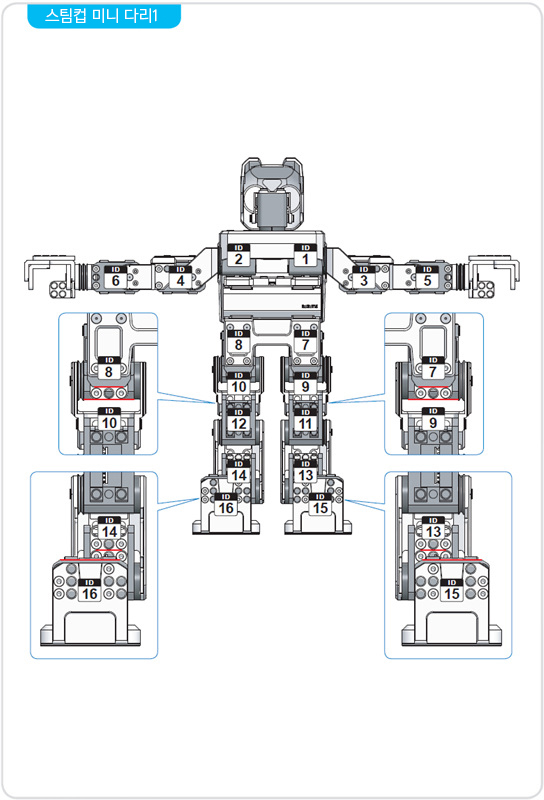
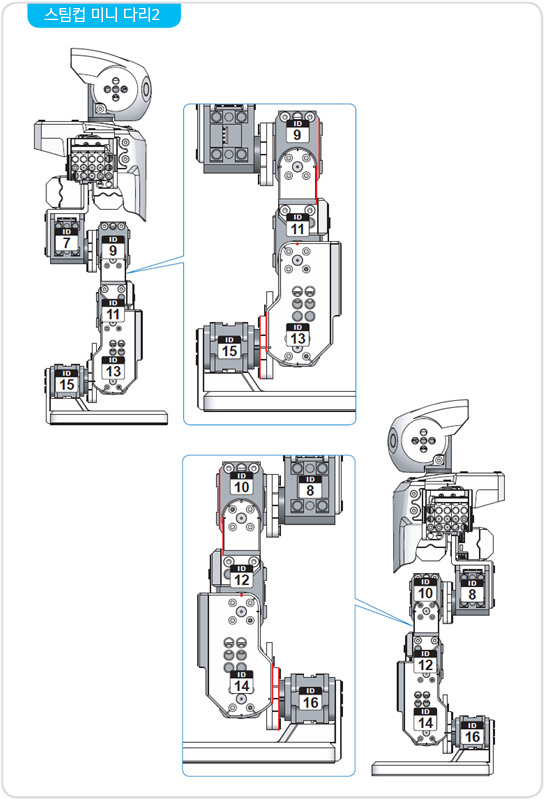
ID MAP