
Edit on GitHub
DYNAMIXEL-Y is ROBOTIS’ industrialized premium robot actuator solution for full scale Robots
제품 라인업
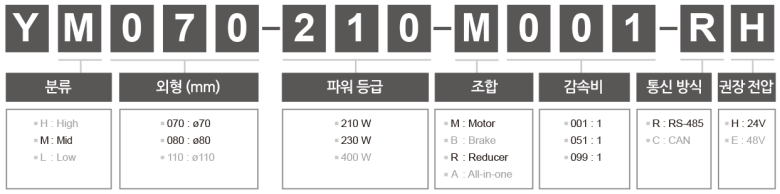
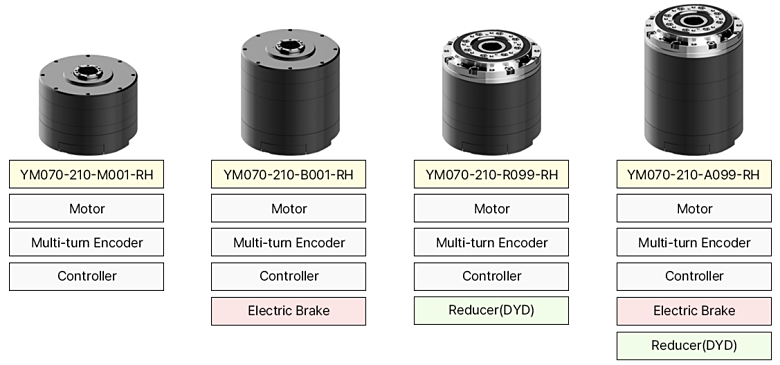
다이나믹셀-Y 시리즈 라인업
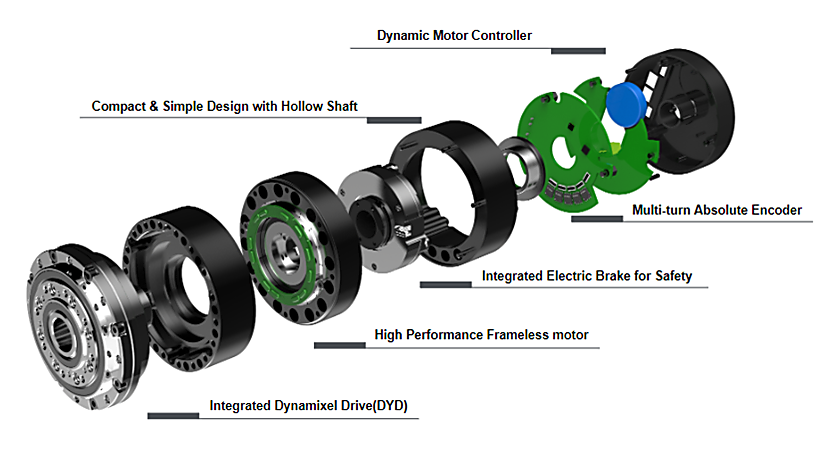
Features
- High Performance Frameless motor
- Multi-turn Absolute Encoder
- Integrated Electric Brake for Safety
- Integrated Dynamixel Drive(DYD)
- Compact & Simple Design with Hollow Shaft
- Dynamic Motor Controller

주요 사양
YM070
| 모델명 | 크기 [mm] | 무게 [g] | 기어비 [R] | 정격 토크 [N.m] | 최대 토크 [N.m] | 동작 전압 [V] | 해상도 [pulse/rev] | 구성 |
|---|---|---|---|---|---|---|---|---|
| YM070-210-M001-RH | Ø70 x 50.9 | 340 | - | 0.32 | 0.64 | 24 | 524,288 | Motor |
| YM070-210-B001-RH | Ø70 x 71.0 | 530 | - | 0.32 | 0.64 | 24 | 524,288 | Motor, Brake |
| YM070-210-R051-RH | Ø70 x 71.1 | 790 | 51:1 | 8.2 | 16.3 | 24 | 26,738,688 | Motor, Reducer |
| YM070-210-R099-RH | Ø70 x 71.1 | 790 | 99:1 | 14.6 | 31.7 | 24 | 51,904,512 | Motor, Reducer |
| YM070-210-A051-RH | Ø70 x 91.2 | 980 | 51:1 | 8.2 | 16.3 | 24 | 26,738,688 | Motor, Reducer, Brake |
| YM070-210-A099-RH | Ø70 x 91.2 | 980 | 99:1 | 14.6 | 31.7 | 24 | 51,904,512 | Motor, Reducer, Brake |
YM080
| 모델명 | 크기 [mm] | 무게 [g] | 기어비 [R] | 정격 토크 [N.m] | 최대 토크 [N.m] | 동작 전압 [V] | 해상도 [pulse/rev] | 구성 |
|---|---|---|---|---|---|---|---|---|
| YM080-230-M001-RH | Ø80 x 54.1 | 530 | - | 0.62 | 1.24 | 24 | 524,288 | Motor |
| YM080-230-B001-RH | Ø80 x 76.1 | 890 | - | 0.62 | 1.24 | 24 | 524,288 | Motor, Brake |
| YM080-230-R051-RH | Ø80 x 78.1 | 1,200 | 51:1 | 15.8 | 31.6 | 24 | 26,738,688 | Motor, Reducer |
| YM080-230-R099-RH | Ø80 x 78.1 | 1,200 | 99:1 | 26.0 | 61.4 | 24 | 51,904,512 | Motor, Reducer |
| YM080-230-A051-RH | Ø80 x 100.1 | 1,550 | 51:1 | 15.8 | 31.6 | 24 | 26,738,688 | Motor, Reducer, Brake |
| YM080-230-A099-RH | Ø80 x 100.1 | 1,550 | 99:1 | 26.0 | 61.4 | 24 | 51,904,512 | Motor, Reducer, Brake |
통신 회로
UART 연결 회로도
Main Controller를 직접 제작하여 다이나믹셀-Y를 제어하기 위해서는 Main Controller UART의 신호를 RS485 type으로 변환시켜 주어야 합니다. 다음은 권장 회로도 입니다.
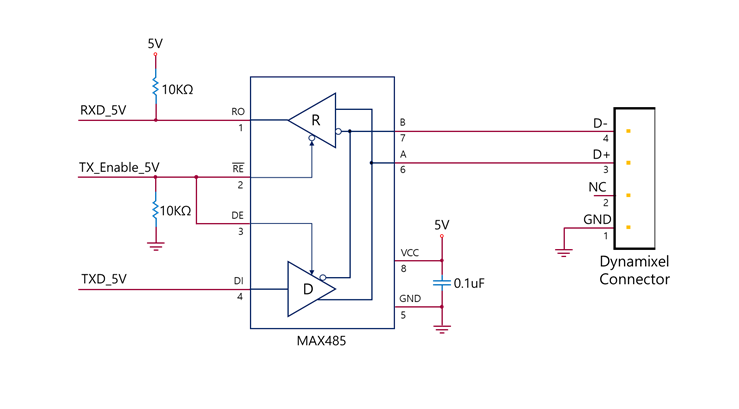
참고: 위 회로는 5V 전원을 사용하는 MCU를 사용하거나 IO가 5V tolerant한 경우 사용 가능합니다. 그 외의 경우, Level Shifter를 사용하세요.
다이나믹셀 전용 제어기에는 위의 회로가 내장되어 있습니다. 위의 회로도에서 TTL Level의 TxD와 RxD는 TX_Enable_5V의 Level에 따라 다음과 같이 Data 신호의 방향이 결정됩니다.
- TX_Enable_5V =High인 경우: TxD의 신호가 D+, D-로 출력
- TX_Enable_5V =Low인 경우: D+, D-의 신호가 RxD로 입력
케이블 연결
DYNAMIXEL-Y 커넥터의 핀 배열은 아래 그림과 같습니다.

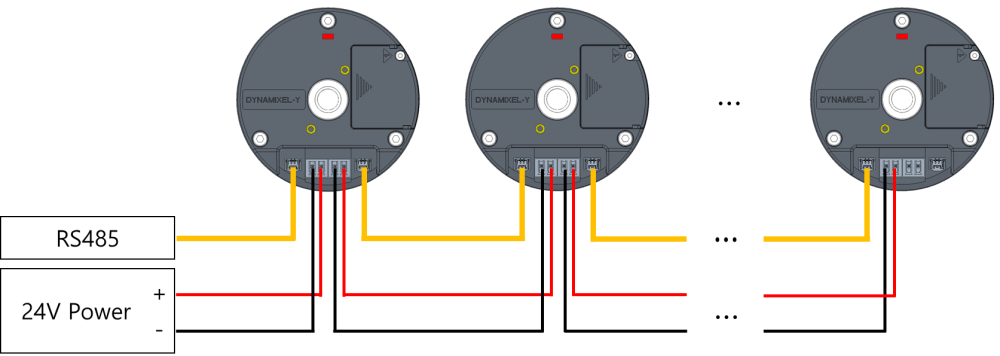
경고: 배선 시에는 핀 배열이 틀리지 않도록 각별히 주의하십시오. 올바르게 연결되지 않을 경우 다이나믹셀의 심각한 손상을 초래할 수 있습니다.