
개요
CM-550
제품 사양
| 항목 | 사양 |
|---|---|
| 무게 | 58.8 [g] |
| MCU | ARM Cortex-M4 (168 [MHz], 32 [Bit]) |
| 동작 전압 | 충전지 : 허용범위 6.5 ~ 15 [V], 권장 전압 11.1 [V] (Li-PO 3cell) SMPS : 허용범위 6.5 ~ 15 [V], 권장 전압 12.0 [V] Micro USB : 허용범위 4.75 ~ 5.25 [V], 권장 전압 5.0 [V] |
| 소모 전류량 | 대기시 : 50 [mA] 포트 1 ~ 2 I/O 최대전류 : 0.5 [A] 포트 3 ~ 5 I/O 최대전류 : 0.02 [A] 전체 최대 전류 : 10 [A] (Fuse) |
| 동작 온도 | -5 ~ 70 [°C] |
| 통신 모듈 | BLE Slave 모듈 내장 |
| 내부 I/O 장치 | 버튼 : 2 (MODE, START) 마이크 (소리 감지) : 1 부저 : 1 전압 센서 : 1 자이로 가속도 센서 : 1 온도 센서 : 1 RGB LED : 3 |
| 외부 I/O 장치 | 로보티즈 5핀 포트 : 5 (서보모터/IR센서/온습도센서 : 1, 2번 포트 사용) X 시리즈 다이나믹셀 포트 : 6 |
| 다이나믹셀 포트 | X-series TTL (half-duplex asynchronous) 3-Pin connector: 6 |
| 다이나믹셀 프로토콜 (Packet) | Protocol 2.0 |
XL-320은 CM-550과 호환되지 않습니다.
![]()
위험
(심각한 상해 또는 사망에 이르게 할 수 있습니다.)
- 제품 주위에 가연성 물질, 계면활성제, 음료수, 물을 분사하거나 흡입시키지 마세요.
- 작동 중인 제품에 손, 발과 같은 신체 또는 신체의 일부를 넣지 마세요.
- 제품에서 이상한 냄새가 나거나, 연기가 발생하면 전원 연결을 즉시 끊어주세요.
- 아이들이 제품으로 장난치지 않도록 하세요.
- 전원공급 시 극성을 반드시 확인해 주세요.
![]()
경고
(상해나 제품 손상의 원인이 됩니다.)
- 제품의 사용 환경을 준수하세요. (전압, 온도 등)
- 작동 중인 제품 내부로 칼날, 압정, 불씨 등을 흡입시키지 마세요.
![]()
주의
(상해나 제품 손상의 원인이 됩니다.)
- 제품을 사용자 임의로 분해 또는 개조하지 마세요.
- 제품에 강한 충격을 가하거나 떨어드리지 마세요.
컨트롤 테이블
컨트롤 테이블은 제어기 내부에 존재하는 데이터의 집합체입니다. 사용자는 컨트롤 테이블의 주소를 이용하여 해당 주소에 저장된 데이터를 읽어오거나 새로운 데이터를 입력할 수 있습니다.
- 영역(EEPROM, RAM) 컨트롤 테이블은 2개의 영역으로 구분됩니다. RAM 영역에 위치한 데이터는 전원이 인가될 때마다 다시 기본값으로 설정됩니다(Volatile). 반면 EEPROM 영역에 위치한 데이터는 값을 변경하면 전원이 꺼져도 그 값이 보존됩니다(Non-Volatile).
- 접근 속성(R, RW) 컨트롤 테이블의 데이터에는 2개의 접근 속성이 있습니다. ‘RW’는 읽기와 쓰기 접근이 모두 가능합니다. 반면 ‘R’은 읽기 전용(Read Only) 속성을 갖습니다. 읽기 전용 속성의 데이터는 사용자가 임의로 값을 바꿀 수 없기 때문에 주로 측정 또는 모니터링 용도로 사용되고, 읽기 쓰기 속성(‘RW’)은 제어 용도로 사용됩니다.
- 기본값 제어기에 전원이 인가될 때 컨트롤 테이블의 각 데이터는 기본값으로 설정됩니다. 사용자가 기본값을 변경하면 새로운 기본값이 적용됩니다. RAM 영역의 기본값은 전원이 인가되었을 때 설정되는 값입니다.
- 크기 데이터의 크기는 용도에 따라 1 ~ 4 byte로 정해져 있습니다. Instruction Packet을 통해 데이터를 변경할 때는 해당 데이터의 크기를 확인하시기 바랍니다.
CM-550 컨트롤 테이블
| 영역 | 주소 | 크기[Byte] | 명칭 | 접근 | 초기 값 | 범위 | 단위 | 설정 값 | 설명 |
|---|---|---|---|---|---|---|---|---|---|
| EEPROM | 0 | 2 | Model Number | R | 450 | - | - | - | 모델 번호 |
| EEPROM | 6 | 1 | Version of Firmware | R | - | 0 ~ 255 | - | - | 펌웨어 버전 정보 |
| EEPROM | 7 | 1 | ID | R | 200 | - | - | - | 제어기 ID |
| EEPROM | 11 | 1 | Bootloader Version | R | - | 0 ~ 255 | - | - | 부트로더 버전 정보 |
| EEPROM | 12 | 1 | Baud Rate (DYNAMIXEL) | RW | 3 | 0 ~ 7 | - | 0 : 9600 bps 1 : 57600 bps 2 : 115200 bps 3 : 1 Mbps 4 : 2 Mbps 5 : 3 Mbps 6 : 4 Mbps 7 : 4.5 Mbps |
다이나믹셀 포트 통신 속도 제어기 부팅 시, 다이나믹셀의 보드레이트가 57600 bps 으로 설정되어 있을경우, 1M bps로 자동 변경됨. 다이나믹셀이 57600 이외의 보드레이트로 설정되어있을경우, 이전에 설정된 보드레이트는 유지 됨. |
| EEPROM | 13 | 1 | Baud Rate (UART) | RW | 1 | 0 ~ 7 | - | (주소: 12) 참고 | 제어기 내장 UART 포트 통신 속도 |
| EEPROM | 15 | 1 | Contorller Direction | RW | 0 | 0 ~ 1 | - | 0 : Vertical 1 : Horizontal |
제어기 세워지는 방향에 따라 Vertical 또는 Horizontal을 설정. 휴머노이드처럼 제어기를 세워서 장착할 경우, Vertical로 설정할 것. |
| EEPROM | 16 | 1 | Temperature Limit | RW | 60 | -20 ~ 100 | °C | - | 작동 온도 설정. 해당 값 초과 시, 다이나믹셀의 전원을 차단 한다. |
| RAM | 20 | 1 | Bypass Port |
R | 0 | 0 ~ 2 | - | 0 : BLE 1 : UART 2 : USB |
다이나믹셀 포트와 Bypass 하는 포트 선택 (BLE, UART, USB) |
| RAM | 21 | 1 | Mode Number | RW | 2 | 0 ~ 4 | - | 0 : IDLE 1 : Task Play 2 : Manage 3 : Bootloader 4 : Reboot |
- IDLE (0), Task Play(1) ,Manage(2) 로 제어기 동작모드 설정. - Bootloader(3) 설정시 부트로더 진입. - Reboot(4) 설정시 제어기 다시 시작. |
| RAM | 22 | 1 | Dxl Power Switch | RW | 1 | 0 ~ 1 | - | 0 : False 1 : True |
다이나믹셀 포트의 전원 On (True) / Off (False) 스위치. 기본값은 1이며, 이상 상태감지시 0 으로 바뀐다. |
| RAM | 23 | 2 | Error Code | R | 0 | 0 ~ 65535 | - | - | 제어기에서 에러가 발생했을 경우 확인 할 수 있는 에러 코드 |
| RAM | 26 | 1 | Start Button Status | R | 0 | 0 ~ 3 | - | 0 : 버튼이 누르지 않은 상태 1 : START 버튼이 눌린 상태 2: MODE 버튼이 눌린 싱태 3: START 와 MODE 버튼이 동시에 눌린 상태 |
Start 버튼 및 Mode 버튼 2개의 버튼 입력 상태 확인 할 수 있다. 해당하는 제어기 버튼을 누르면 값이 바뀐다. |
| RAM | 27 | 1 | BLE Check | R | - | 0 ~ 1 | - | 0 : False 1 : True |
제어기에 내장된 BLE 모듈이 있는지 확인함. 0인 경우 내장 BLE 모듈이 동작하지 않거나 없는 경우이다. |
| RAM | 28 | 1 | Button Released Event | R | 1 | 0 ~ 1 | - | 0 : False 1 : True |
제어기의 Start 버튼이 눌렀다가 떨어지면 True가 되고 값을 읽은 후 False로 변경된다. |
| RAM | 29 | 2 | Button Pressed ms | R | 1 | 0 ~ 65535 | ms | - | 버튼이 눌려졌을때의 시간. 버튼을 누르고 있으면 누른 시간 만큼 ms 단위로 값이 증가한다. |
| RAM | 31 | 1 | Button Pressed Sec | RW | 1 | 0 ~ 255 | Sec | - | 버튼이 눌려졌을때의 시간. 버튼을 누르고 있으면 누른 시간 만큼 sec 단위로 값이 증가한다. |
| RAM | 35 | 1 | Task Print Port | RW | 0 | 0 ~ 2 | - | 0 : BLE 1 : UART 2 : USB |
TASK에서 시리얼출력 했을 경우에 표시할 포트를 선택 할 수 있다. |
| RAM | 36 | 1 | App Port | RW | 0 | 0 ~ 1 | - | 0 : BLE 1 : UART |
제어기와 스마트기기를 연결할 포트를 선택 할 수 있다. - BLE (0) 선택 시, 내장 BLE 모듈을 사용 (기본 값) - UART (1) 선택시, 외장 UART 포트에 연결된 포트 사용. |
| RAM | 37 | 1 | App Connected | R | 0 | 0 ~ 1 | - | 0 : False 1 : True |
제어기와 스마트 기기가 연결되어 있는지 확인할 수 있다. |
| RAM | 39 | 1 | Num of Dxl | R | 0 | 0 ~ 255 | - | - | 제어기에 연결된 다이나믹셀의 갯수이며, Scan DXL (주솟값 40)을 통해서 다시 연결된 다이나믹셀을 찾아서 업데이트 할 수 있다. |
| RAM | 40 | 1 | Scan Dxl | RW | 0 | 0 ~ 1 | - | 0 : False 1 : True |
Protocol 1.0 및 2.0 검색을 하여 제어기에 연결된 다이나믹셀을 업데이트 한다. |
| RAM | 41 | 1 | Dxl Torque | RW | 0 | 0 ~ 3 | - | 0 : NONE 1 : OFF, Busy 2 : ON 3 : REBOOT |
제어기에 연결된 다이나믹셀의 토크를 활성화 (또는 비 활성화) 하거나, 재부팅한다. Dxl Torque 값 변경 시, 다시 0으로 돌아 올수 있도록 약간의 시간이 필요하다. |
| RAM | 43 | 1 | Remote Port | RW | 0 | 0 ~ 2 | - | 0 : BLE 1 : UART 2 : USB |
리모트 컨트롤러를 사용할 포트를 지정한다 만약 RC -100B 가 제어기 내부의 BLE 와 연결된다면 BLE(0) 을 선택한다. (기본값: BLE(0)). |
| RAM | 51 | 4 | Print Number | W | 0 | -32768 ~ 32767 | - | - | 화면 출력용 4바이트 signed 값 (줄 바꿈 없음) |
| RAM | 55 | 4 | Print Number LF | W | 0 | -32768 ~ 32767 | - | - | 화면 출력용 4바이트 signed 값 (줄 바꿈 있음) |
| RAM | 59 | 2 | Transmitting Remocon Data | RW | 0 | 0 ~ 65535 | - | - | Remote Port (주소: 43) 로 보낼 무선 데이터 |
| RAM | 61 | 2 | Received Remocon Data | R | 0 | 0 ~ 65535 | - | - | Remote Port (주소: 43) 에서 받은 무선 데이터 |
| RAM | 63 | 1 | Remocon Data Arrived | R | 0 | 0 ~ 1 | - | 0 : False 1 : True |
새로 받은 무선데이터 유무 |
| RAM | 64 | 1 | Motion Play Speed | W | 100 | 20 ~ 200 | - | - | 모션 재생속도를 조절할 수 있다. (최소 20, 최대 100) |
| RAM | 66 | 2 | Motion Index Number | RW | 0 | 0 ~ 65535 | - | 0: 모션 정지 유닛을 이용하여 모션 정지하기. 1~65532: 선택한 유닛의 모션 실행 하기 65533 : 모션 즉각 정지하기 65534 : 현재 키-프레임 에서 모션 정지하기 65535 : 65535 : 현재 유닛에서 모션 정지 하기 |
특정 모션을 재생하거나 현재 재생중인 모션을 정지한다. |
| RAM | 68 | 1 | Motion Play Status | R | 0 | 0 ~ 1 | - | 0 : False 1 : True |
모션 실행 유무를 확인할 수 있다. |
| RAM | 69 | 2 | Motion Next Page | RW | 0 | 0 ~ 65535 | - | 0~65534 : 이동할 페이지 65535 : 사용 안함 |
모터의 정지 없이 부드러운 모션 페이지 사이를 이동 할때 사용한다. 모션 프로파일 생성 시 다음 모션 페이지의 동작을 예측하여, 부드러운 모션을 생성 할 수 있다. |
| RAM | 71 | 2 | Motion Count | R | - | 0 ~ 1023 | - | - | 플래시 메모리에 저장된 모션 페이지의 개수. |
| RAM | 73 | 1 | 128 ms Timer Value | RW | 0 | 0 ~ 255 | 128 ms | - | 128 ms 카운트 다운 타이머. |
| RAM | 74 | 2 | 1 ms Timer Value | RW | 0 | 0 ~ 65535 | ms | - | 1 ms 카운트 다운 타이머 |
| RAM | 77 | 1 | Random Number | RW | 0 | 0 ~ 255 | - | - | 0 부터 설정 한 값까지 무작위 숫자를 생성 한다. |
| RAM | 84 | 1 | Buzzer Index | RW | 0 | 0 ~ 255 | - | - | - 멜로디 모드: 0 ~ 25 번 멜로디를 실행한다. - 음계 모드: 0 ~ 51번의 음계를 실행한다. |
| RAM | 85 | 1 | Buzzer Time | RW | 0 | 0 ~ 255 | 0.1 sec | - | 음계 모드 및 멜로디 모드로 진입할 수 있다. 음계 및 멜로디는 Buzzer Index에서 재생한다. - 0 : 음계를 0.3 s 동안 재생 - 1 ~ 50: 음계를 0.1 ~ 5.0 s 시간 동안 재생. Unit: 0.1 s - 50 ~ 254: 음계를 5 s 동안 재생 - 255: 멜로디 모드 진입 |
| RAM | 86 | 1 | Sound Detected Count | RW | 0 | 0 ~ 255 | - | - | 제어기에 내장된 마이크가 인식한 최종 감지 횟수 |
| RAM | 87 | 1 | Sound Detecting Count | R | 0 | 0 ~ 255 | - | - | 제어기에 내장된 마이크가 인식한 실시간 감지횟수 |
| RAM | 88 | 1 | Low Battery Sound Enable | RW | 1 | 0 ~ 1 | - | 0 : False 1 : True |
저전압 알람을 활성화 또는 비활성화 시킨다. |
| RAM | 89 | 1 | Voltage | R | - | 0 ~ 255 | 0.1 V | - | 현재 제어기에 인가된 전압을 읽을 수 있다. |
| RAM | 90 | 1 | Temperature | R | - | -20 ~ 100 | °C | - | 현재 제어기의 온도를 읽을 수 있다. |
| RAM | 91 | 1 | Red LED | RW | 0 | 0 ~ 1 | - | 0 : Off 1 : On |
제어기의 Aux Red LED On / Off |
| RAM | 92 | 1 | Green LED | RW | 0 | 0 ~ 1 | - | 0 : Off 1 : On |
제어기의 Aux Green LED On / Off |
| RAM | 93 | 1 | Blue LED | RW | 0 | 0 ~ 1 | - | 0 : Off 1 : On |
제어기의 Aux Blue LED On / Off |
| RAM | 102 | 2 | Roll | R | 0 | -18000 ~ 18000 | 0.01 degree | - | IMU Roll axis 데이터 |
| RAM | 104 | 2 | Pitch | R | 0 | -9000 ~ 9000 | 0.01 degree | - | IMU Pitch axis 데이터 |
| RAM | 106 | 2 | Yaw | R | 0 | -18000 ~18000 | 0.01 degree | - | IMU Yaw axis 데이터 |
| RAM | 108 | 2 | Gyro X | R | 0 | -32768 ~ 32767 | 0.01 degree/s | - | IMU Gyro X axis data |
| RAM | 110 | 2 | Gyro Y | R | 0 | -32768 ~ 32767 | 0.01 degree/s | - | IMU Gyro Y axis data |
| RAM | 112 | 2 | Gyro Z | R | 0 | -32768 ~ 32767 | 0.01 degree/s | - | IMU Gyro Z axis data |
| RAM | 114 | 2 | Acc X | R | 0 | -32768 ~ 32767 | 0.01 G | - | IMU Accel X axis data |
| RAM | 116 | 2 | Acc Y | R | 0 | -32768 ~ 32767 | 0.01 G | - | IMU Accel Y axis data |
| RAM | 118 | 2 | Acc Z | R | 0 | -32768 ~ 32767 | 0.01 G | - | IMU Accel Z axis data |
| RAM | 120 | 4 | micros | R | 0 | -2147483648 ~ 2147483647 | us | - | 1 us 제어기 내부 타이머. |
| RAM | 124 | 4 | millis | R | 0 | -2147483648 ~ 2147483647 | ms | - | 1 ms 제어기 내부 타이머. |
| EEPROM | 139 | 1 | BLE Signal Power | RW | 2 | 0 ~ 9 | - | 0: unknown (BLE 신호 읽기 실패. 해당값은 설정 할수 없음.) 1: +4dB 2: 0dB 3: -4dB 4: -8dB 5: -12dB 6: -16dB 7: -20dB 8: -30dB 9: -40dB |
내장된 BLE 세기 설정. |
| EEPROM | 144 | 12 | BLE MAC Address | R | 0 | - | - | - | 제어기 내부 BLE 모듈의 MAC 주소를 나타낸다. |
| RAM | 156 | 1 | USB OTG Connected | R | 0 | 0 ~ 1 | - | - | 제어기와 USB OTG 케이블 연결 상태를 나타낸다. - 0: USB OTG 케이블이 연결되지 않음. - 1: USB OTG 케이블이 연결됨 |
| RAM | 157 | 1 | Rpi Connected | R | 0 | 0 ~ 1 | - | - | 제어기와 라즈베리파이 (RPI 보드) 연결 상태를 나타낸다. - 0: RPI보드가 연결되지 않음; - 1: RPI보드가 연결됨 |
| RAM | 164 | 1 | Rpi IP 1 | R | 0 | 0 ~ 255 | - | - | 연결된 RPI보드의 IP 첫번째 필드 |
| RAM | 165 | 1 | Rpi IP 2 | R | 0 | 0 ~ 255 | - | - | 연결된 RPI보드의 IP 두번째 필드 |
| RAM | 166 | 1 | Rpi IP 3 | R | 0 | 0 ~ 255 | - | - | 연결된 RPI보드의 IP 세번째 필드 |
| RAM | 167 | 1 | Rpi IP 4 | R | 0 | 0 ~ 255 | - | - | 연결된 RPI보드의 IP 네번째 필드 |
| RAM | 199 | 1 | Offset Control | RW | 0 | 0 ~ 3 | - | 0 : None 1 : Read 2 : Write 3 : Clear |
Motion Offset 데이터를 FLASH에 저장하거나 읽어온다. Clear(3)을 사용하면 저장된 Motion Offset과 Joint Offset 값을 모두 0으로 초기화 한다. |
| RAM | 390 | 1 | Module Category 1 | RW | 0 | 0 ~ 18 | - | 0 : None 1 : Wheel Velocity 2 : Servo Position 3 : Servo Speed 4 : IR Sensor 5 : DMS 6 : Touch Sensor 7 : LED Module 8 : User Device 9 : Temperature Sensor 11 : Magnetic Sensor 12 : Motion Sensor 13 : Color Sensor 14 : Moisture Sensor 15 : Temperature(Moisture) 16 : Brightness Sensor 17 : RED Brightness of RED/BLUE LED Board 18 : BLUE Brightness of RED/BLUE LED Board |
- 제어기 5 Pin 포트에 연결되는 주변장치를 사용하기 위한 모드를 수동으로 선택할 수 있다. - 0 (None) 을 선택하면, 제어기 OLLO 포트값을 읽을 때마다, 해당 포트의 주소에 설정된 기능에따라 자동으로 변경 된다. |
| RAM | 392 | 1 | Module Category 2 | RW | 0 | 0 ~ 18 | - | (주소: 390) 참고 | (주소: 390) 참고 |
| RAM | 394 | 1 | Module Category 3 | RW | 0 | 0 ~ 16 | - | 0 : None 5 : DMS 6 : Touch Sensor 7 : LED Module 8 : User Device 9 : Temperature Sensor 11 : Magnetic Sensor 12 : Motion Sensor 13 : Color Sensor 16 : Brightness Sensor |
(주소: 390) 참고 |
| RAM | 396 | 1 | Module Category 4 | RW | 0 | 0 ~ 16 | - | (주소: 394) 참고 | (주소: 390) 참고 |
| RAM | 398 | 1 | Module Category 5 | RW | 0 | 0 ~ 16 | - | (주소: 394) 참고 | (주소: 390) 참고 |
| RAM | 400 | 2 | Port 1 Wheel Velocity | RW | 0 | 0 ~ 2047 | - | CCW : 0~1023 CW : 1024~2047 |
DC 모터 모드로 변경하여, 모터의 PWM을 출력으로 모터의 속도를 제어한다. |
| RAM | 402 | 2 | Port 2 Wheel Velocity | RW | 0 | 0 ~ 2047 | - | (주소: 400) 참고 | (주소: 400) 참고 |
| RAM | 404 | 2 | Port 1 Servo Position | RW | 0 | 0 ~ 1023 | - | 0~1023 | - Servo 모터 모드로 변경하여, 모터의 위치를 제어한다. - 0 ~ 300도 구간 제어 가능, (512 : 모터의 혼이 정중앙에 위치 ) |
| RAM | 406 | 2 | Port 2 Servo Position | RW | 0 | 0 ~ 1023 | - | (주소: 404) 참고 | (주소: 404) 참고 |
| RAM | 408 | 2 | Port 1 Servo Speed | RW | 0 | 0 ~ 1023 | - | CCW : 0~1023 CW : 1024~2047 |
Servo 모터 모드에서 혼의 이동속도를 조절 한다. |
| RAM | 410 | 2 | Port 2 Servo Speed | RW | 0 | 0 ~ 1023 | - | (주소: 408) 참고 | (주소: 408) 참고 |
| RAM | 415 | 2 | Port 1 IR Sensor | R | 0 | 0 ~ 1023 | - | - | IR센서의 감지 값 |
| RAM | 417 | 2 | Port 2 IR Sensor | R | 0 | 0 ~ 1023 | - | - | (주소: 415) 참고 |
| RAM | 419 | 2 | Port 1 DMS Sensor | R | 0 | 0 ~ 1023 | - | - | DMS 감지 값 |
| RAM | 421 | 2 | Port 2 DMS Sensor | R | 0 | 0 ~ 1023 | - | - | (주소: 419) 참고 |
| RAM | 423 | 2 | Port 3 DMS Sensor | R | 0 | 0 ~ 1023 | - | - | (주소: 419) 참고 |
| RAM | 425 | 2 | Port 4 DMS Sensor | R | 0 | 0 ~ 1023 | - | - | (주소: 419) 참고 |
| RAM | 427 | 2 | Port 5 DMS Sensor | R | 0 | 0 ~ 1023 | - | - | (주소: 419) 참고 |
| RAM | 429 | 1 | Port 1 Touch Sensor | R | 0 | 0 ~ 1 | - | 0 : False 1 : True |
접촉센서 (터치 센서) 감지 여부 |
| RAM | 430 | 1 | Port 2 Touch Sensor | R | 0 | 0 ~ 1 | - | (주소: 429) 참고 | (주소: 429) 참고 |
| RAM | 431 | 1 | Port 3 Touch Sensor | R | 0 | 0 ~ 1 | - | (주소: 429) 참고 | (주소: 429) 참고 |
| RAM | 432 | 1 | Port 4 Touch Sensor | R | 0 | 0 ~ 1 | - | (주소: 429) 참고 | (주소: 429) 참고 |
| RAM | 433 | 1 | Port 5 Touch Sensor | R | 0 | 0 ~ 1 | - | (주소: 429) 참고 | (주소: 429) 참고 |
| RAM | 434 | 1 | Port 1 LED Module | RW | 0 | 0 ~ 3 | - | 0 : 양쪽 OFF 1 : 왼쪽 OFF, 오른쪽 ON 2 : 왼쪽 ON, 오른쪽 OFF 3 : 양쪽 ON |
LED모듈 제어 |
| RAM | 435 | 1 | Port 2 LED Module | RW | 0 | 0 ~ 3 | - | (주소: 434) 참고 | (주소: 434) 참고 |
| RAM | 436 | 1 | Port 3 LED Module | RW | 0 | 0 ~ 3 | - | (주소: 434) 참고 | (주소: 434) 참고 |
| RAM | 437 | 1 | Port 4 LED Module | RW | 0 | 0 ~ 3 | - | (주소: 434) 참고 | (주소: 434) 참고 |
| RAM | 438 | 1 | Port 5 LED Module | RW | 0 | 0 ~ 3 | - | (주소: 434) 참고 | (주소: 434) 참고 |
| RAM | 439 | 2 | Port 1 User Device | RW | 0 | 0 ~ 1023 | - | OUTPUT 0 : 왼쪽 5V, 오른쪽 5V 1 : 왼쪽 5V, 오른쪽 0V 2 : 왼쪽 0V, 오른쪽 5V 3 : 왼쪽 0V, 오른쪽 0V INPUT 0 : 0 V 1023 : 5V |
- OUTPUT : 제어기의 오른쪽 왼쪽 2개의 출력 핀을 제어 한다. - INPUT : 사용자 장치에 0 ~ 1023 아날로그 입력을 한다. |
| RAM | 441 | 2 | Port 2 User Device | RW | 0 | 0 ~ 1023 | - | (주소: 439) 참고 | (주소: 439) 참고 |
| RAM | 443 | 2 | Port 3 User Device | RW | 0 | 0 ~ 1023 | - | (주소: 439) 참고 | (주소: 439) 참고 |
| RAM | 445 | 2 | Port 4 User Device | RW | 0 | 0 ~ 1023 | - | (주소: 439) 참고 | (주소: 439) 참고 |
| RAM | 447 | 2 | Port 5 User Device | RW | 0 | 0 ~ 1023 | - | (주소: 439) 참고 | (주소: 439) 참고 |
| RAM | 449 | 1 | Port 1 Temperature Sensor | R | 0 | -20 ~ 120 | °C | - | 제어기 내부의 온도센서에서 측정한 온도 값 |
| RAM | 450 | 1 | Port 2 Temperature Sensor | R | 0 | -20 ~ 120 | °C | - | (주소: 449) 참고 |
| RAM | 451 | 1 | Port 3 Temperature Sensor | R | 0 | -20 ~ 120 | °C | - | (주소: 449) 참고 |
| RAM | 452 | 1 | Port 4 Temperature Sensor | R | 0 | -20 ~ 120 | °C | - | (주소: 449) 참고 |
| RAM | 453 | 1 | Port 5 Temperature Sensor | R | 0 | -20 ~ 120 | °C | - | (주소: 449) 참고 |
| RAM | 459 | 1 | Port 1 Magnet Sensor | R | 0 | 0 ~ 1 | - | 0 : False 1 : True |
자석센서 자석 감지여부 |
| RAM | 460 | 1 | Port 2 Magnet Sensor | R | 0 | 0 ~ 1 | - | (주소: 459) 참고 | (주소: 459) 참고 |
| RAM | 461 | 1 | Port 3 Magnet Sensor | R | 0 | 0 ~ 1 | - | (주소: 459) 참고 | (주소: 459) 참고 |
| RAM | 462 | 1 | Port 4 Magnet Sensor | R | 0 | 0 ~ 1 | - | (주소: 459) 참고 | (주소: 459) 참고 |
| RAM | 463 | 1 | Port 5 Magnet Sensor | R | 0 | 0 ~ 1 | - | (주소: 459) 참고 | (주소: 459) 참고 |
| RAM | 464 | 1 | Port 1 Motion Sensor | R | 0 | 0 ~ 1 | - | 0 : False 1 : True |
제어기의 동작 감지 센서 (PIR)에서 물체 감지 여부 |
| RAM | 465 | 1 | Port 2 Motion Sensor | R | 0 | 0 ~ 1 | - | (주소: 464) 참고 | (주소: 464) 참고 |
| RAM | 466 | 1 | Port 3 Motion Sensor | R | 0 | 0 ~ 1 | - | (주소: 464) 참고 | (주소: 464) 참고 |
| RAM | 467 | 1 | Port 4 Motion Sensor | R | 0 | 0 ~ 1 | - | (주소: 464) 참고 | (주소: 464) 참고 |
| RAM | 468 | 1 | Port 5 Motion Sensor | R | 0 | 0 ~ 1 | - | (주소: 464) 참고 | (주소: 464) 참고 |
| RAM | 469 | 1 | Port 1 Color Sensor | R | 0 | 0 ~ 6 | - | 0 : Unknown 1 : White 2 : Black 3 : Red 4 : Green 5 : Blue 6 : Yellow |
제어기의 칼라센서 감지결과 |
| RAM | 470 | 1 | Port 2 Color Sensor | R | 0 | 0 ~ 6 | - | (주소: 469) 참고 | (주소: 469) 참고 |
| RAM | 471 | 1 | Port 3 Color Sensor | R | 0 | 0 ~ 6 | - | (주소: 469) 참고 | (주소: 469) 참고 |
| RAM | 472 | 1 | Port 4 Color Sensor | R | 0 | 0 ~ 6 | - | (주소: 469) 참고 | (주소: 469) 참고 |
| RAM | 473 | 1 | Port 5 Color Sensor | R | 0 | 0 ~ 6 | - | (주소: 469) 참고 | (주소: 469) 참고 |
| RAM | 474 | 1 | Port 1 Moisture Sensor | R | 0 | 0 ~ 100 | 상대 습도 | - | 제어기의 온습도센서 습도 감지 결과 (물에 전체가 잠길때 감지 값은 100) |
| RAM | 475 | 1 | Port 2 Moisture Sensor | R | 0 | 0 ~ 100 | 상대 습도 | - | (주소: 474) 참고 |
| RAM | 479 | 1 | ort 1 Moisture Temperature | R | 0 | -20 ~ 105 | °C | - | 온습도센서 온도 감지 결과 |
| RAM | 480 | 1 | ort 2 Moisture Temperature | R | 0 | -20 ~ 105 | °C | - | (주소: 479) 참고 |
| RAM | 484 | 2 | Port 1 Brightness | R | 0 | 0 ~ 1023 | - | - | 제어기의 조도센서 감지 결과 |
| RAM | 486 | 2 | Port 2 Brightness | R | 0 | 0 ~ 1023 | - | - | (주소 : 484) 참고 |
| RAM | 488 | 2 | Port 3 Brightness | R | 0 | 0 ~ 1023 | - | - | (주소 : 484) 참고 |
| RAM | 490 | 2 | Port 4 Brightness | R | 0 | 0 ~ 1023 | - | - | (주소 : 484) 참고 |
| RAM | 492 | 2 | Port 5 Brightness | R | 0 | 0 ~ 1023 | - | - | (주소 : 484) 참고 |
| RAM | 494 | 1 | Port 1 RED Brightness | RW | 0 | 0 ~ 100 | % | - | 1번 포트 5핀 RED/BLUE LED 모듈의 RED LED의 밝기 제어 |
| RAM | 495 | 1 | Port 2 RED Brightness | RW | 0 | 0 ~ 100 | % | - | 2번 포트 5핀 RED/BLUE LED 모듈의 RED LED의 밝기 제어 |
| RAM | 499 | 1 | Port 1 BLUE Brightness | RW | 0 | 0 ~ 100 | % | - | 1번 포트 5핀 RED/BLUE LED 모듈의 BLUE LED의 밝기 제어 |
| RAM | 500 | 1 | Port 2 BLUE Brightness | RW | 0 | 0 ~ 100 | % | - | 2번 포트 5핀 RED/BLUE LED 모듈의 BLUE LED의 밝기 제어 |
1: 제어기 부팅 시, 다이나믹셀의 보드레이트가 57600 으로 설정되어 있을경우, 1000000 으로 변경됩니다. 다이나믹셀이 57600 이외의 보드레이트로 설정되어있을경우, 보드레이트는 강제로 변경되지 않습니다.
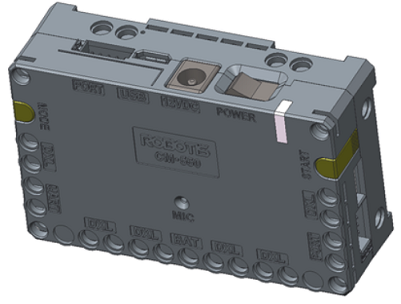
각 부 명칭
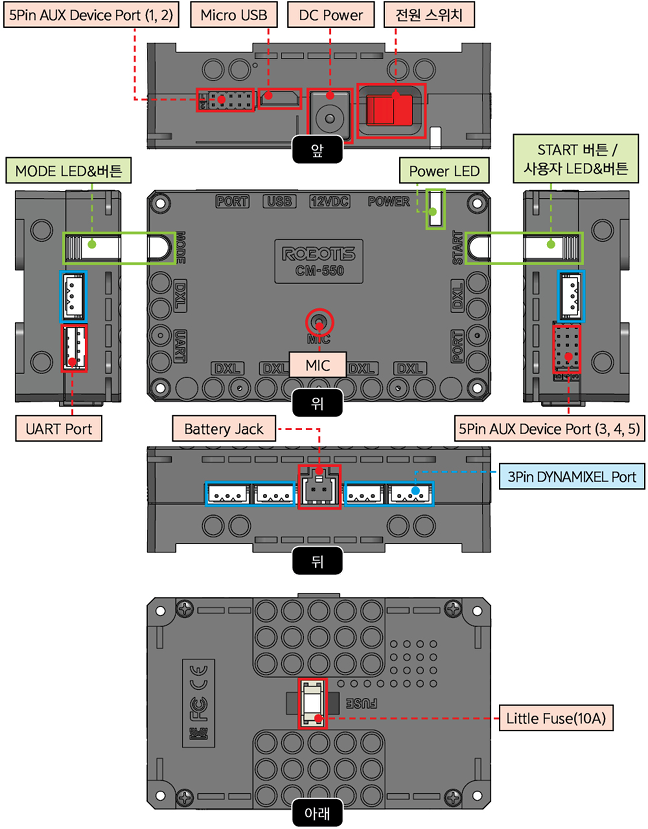
CM-550 각 부 명칭
USB마이크로 USB 포트 : 마이크로 USB 케이블로 CM-550를 PC의 USB 포트와 연결하거나 라즈베리 파이 제로와 연결할 수 있습니다.UART외부통신 포트 : BT-210, BT-410, LN-101, 적외선 수신기 등의 무선 통신용 모듈이나 외부 장치와의 통신용으로 사용되는 포트입니다.BAT충전지 소켓 : 충전지를 연결하는 소켓입니다.12VDC전원잭 : 전원 공급기(SMPS)의 전원잭을 연결하는 소켓입니다.POWER전원 스위치 : 제어기의 전원을 켜거나 끌 때 사용하는 스위치입니다.- 전원 LED : 전원과 무선기기의 상태에 따라 다양한 색상과 표현으로 알려주는 RGB LED입니다.
MODEMODE LED : CM-550의 동작 모드를 표시하는 RGB LED입니다. 아래의 동작 모드 설명을 참고하세요.STARTSTART LED : 아래의 동작 모드 설명을 참고하세요.MODEMODE 버튼 : 제어기의 동작 모드를 변경하기 위한 버튼입니다. 아래의 동작 모드 설명을 참고하세요.STARTSTART 버튼 : 현재 선택된 모드를 실행하기 위한 버튼입니다. 아래의 동작 모드 설명을 참고하세요.DXLX 시리즈 다이나믹셀 포트 : X 시리즈 다이나믹셀을 연결하기 위한 포트입니다.PORT로보티즈 5핀 포트 : DMS, 접촉 센서, 적외선 센서 등의 주변장치를 연결하기 위한 포트입니다. 각 포트마다 번호가 표시되어 있습니다.MIC내장 마이크 : 마이크가 기본으로 내장되어 있습니다.FUSE퓨즈 : 10A 퓨즈가 내장되어 있습니다.
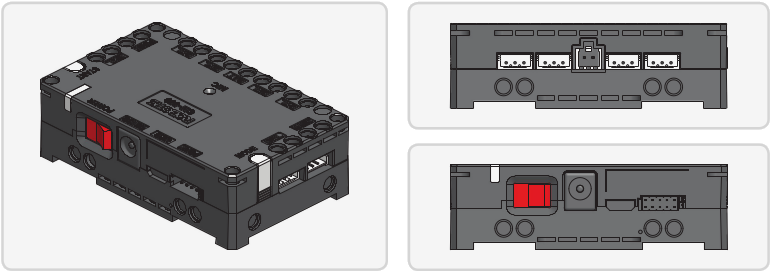
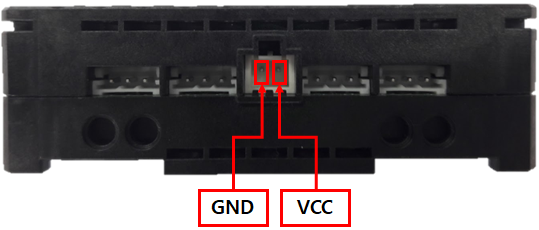
전원 포트
CM-550의 전원 포트 구성은 다음과 같습니다.
로보티즈 5핀 포트
CM-550의 5핀 포트 구성은 다음과 같습니다.
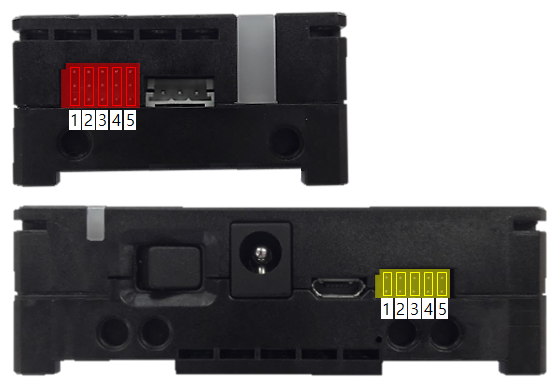
- OUT1 : 3.3 [V] 출력 가능
- 노란색 1, 2번 포트 최대 허용전류 : 0.5 [A] 이하
- 빨간색 3, 4, 5번 포트 최대 허용전류 : 0.02 [A] 이하 (서보모터, IR센서, 온습도 센서 사용안됨)
- VCC : 전원 공급 핀 (5 [V])
- ADC : 3.3 [V] 아날로그 전압 입력 핀
- GND : 접지 핀 (0 [V])
- OUT2 : 3.3 [V] 출력 가능
- 노란색 1, 2번 포트 최대 허용전류 : 0.5 [A] 이하
- 빨간색 3, 4, 5번 포트 최대 허용전류 : 0.02 [A] 이하 (서보모터, IR센서, 온습도 센서 사용안됨)
외부통신 포트
외부 통신 장치의 연결이 가능한 UART 시리얼 포트의 구성은 다음과 같습니다.
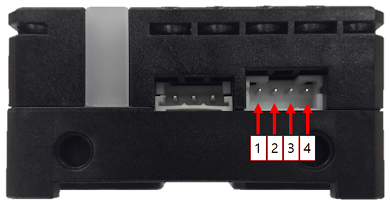
- GND : 접지 핀 (0 [V])
- VCC : 전원 공급 핀 (2.7 ~ 3.6 [V])
- RXD : 수신 핀
- TXD : 송신 핀
다이나믹셀 포트
3핀 TTL 커넥터의 구성은 다음과 같습니다. 자세한 사항은 X 시리즈 TTL 3핀 배열을 참조하십시오. 커넥터의 방향이 바뀌지 않도록 유의하십시오.
| Item | TTL |
|---|---|
| Pinout | 1 GND2 VDD3 DATA |
| Diagram |  |
| Housing |  JST EHR-03 |
| PCB Header | 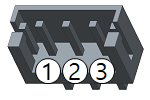 JST B3B-EH-A |
| Crimp Terminal | JST SEH-001T-P0.6 |
| Wire Gauge for DYNAMIXEL | 21 AWG |
- GND : 접지 핀 (0 [V])
- VDD : 전원 공급 핀 (베터리 전압과 동일)
- DATA : 데이터 송수신 핀
주의: 커넥터 제조사의 PIN 순서와 상이할 수 있습니다. 사용자의 안전을 보호하고, 재산상의 손해를 막기위해, 반드시 PIN 순서를 확인하세요.
주의 : XL-320은 CM-550과 호환되지 않습니다.
전원 연결
CM-550의 BAT 충전지 소켓에 충전지를 연결하거나, 12V SMPS 어댑터를 12VDC 전원잭에 연결하고 POWER 전원 스위치를 ON 으로 설정하면 전원이 켜집니다. 전원이 정상적으로 공급되면 전원 LED가 켜집니다.
참고 : 제어기에 충전지와 12V SMPS가 모두 연결되어 있는 경우, 제어기는 12V SMPS의 전원을 우선적으로 사용합니다.

작동 방법
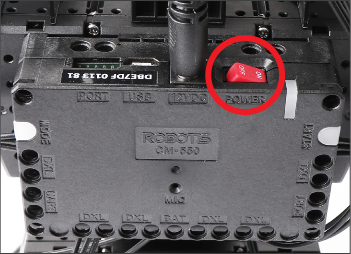
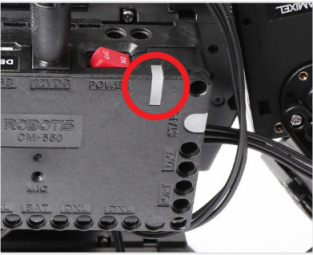
전원 켜기
전원 스위치를 OFF에서 ON으로 변경하시면 전원이 켜집니다.
만약 전원 스위치를 ON으로 연결했을 경우에도 전원이 켜지지 않는다면 충전지가 방전되었을 수 있습니다. 충전하기를 참조하여 충전지를 충전 후 사용하거나, 전원공급기(12V SMPS)를 이용하여 로봇을 구동하시기 바랍니다.
시작
로봇을 동작시키기 위해서는 MODE 버튼이 초록색으로 깜빡일 때까지 MODE 버튼을 누릅니다. MODE 버튼이 초록색으로 깜빡이고 있을때 START 버튼을 누르면 제어기에 저장된 코드가 실행됩니다.
START 버튼을 눌렀을 때 MODE 버튼이 점멸하지 않으면 올바르게 실행되고 있는 상태입니다.
종료
실행되고 있는 동작을 중단하고 싶을 경우 MODE 버튼을 눌러서 다시 대기 모드 상태로 만들거나 전원 스위치로 전원을 OFF 합니다.
동작 모드
대기 모드에서는 MODE 버튼이 점멸합니다. 버튼이 깜빡거리는 동안 START 버튼을 누르면 해당 모드로 진입합니다.
다시 MODE 버튼을 누르면 MODE 버튼이 깜빡이며 대기 모드로 빠져나옵니다.
MANAGE
- 로보플러스 소프트웨어를 통해 제어기와 다이나믹셀을 관리할 수 있는 모드입니다.
- MANAGE 모드에서는
MODE버튼이 빨간색입니다. - R+ Manager 2.0을 이용하여 CM-550, X 시리즈 다이나믹셀을 설정하거나 테스트하기 위해 사용합니다.
- R+ Manager 2.0 또는 R+ Task 3.0과 CM-550이 연결되면 자동으로 MANAGE 모드로 변경됩니다.
주의 : XL-320은 CM-550과 호환되지 않습니다.
PLAY
- 태스크 코드를 실행할 수 있는 모드입니다.
- PLAY 모드에서는
MODE버튼이 초록색입니다. - R+ Task 3.0을 이용하여 작성한 코드를 CM-550에 다운로드 한 뒤에 사용합니다.
MODE버튼이 초록색으로 깜빡거릴때 START 버튼을 누르면 태스크가 실행됩니다.
BOOT LOADER
- CM-550 제어기의 펌웨어를 복구할 수 있는 모드입니다.
- BOOT LOADER 모드에서는
MODE버튼이 파란색입니다. MODE버튼을 누른 상태에서 CM-550의 전원을 켜거나 USB를 연결하면 부트로더 모드가 실행됩니다.MODE버튼이 깜빡이는 상태에서MODE버튼을 5초 이상 누르면 알림음과 함께 부트로더 모드가 실행됩니다.
펌웨어 복구
펌웨어의 오류나 잘못된 프로그램의 다운로드로 인해 제어기가 정상적으로 동작하지 않는 경우, R+ Manager 2.0의 펌웨어 복구 기능으로 제어기를 복구할 수 있습니다.
펌웨어를 복구할 때에는 USB 포트의 사용을 권장합니다.
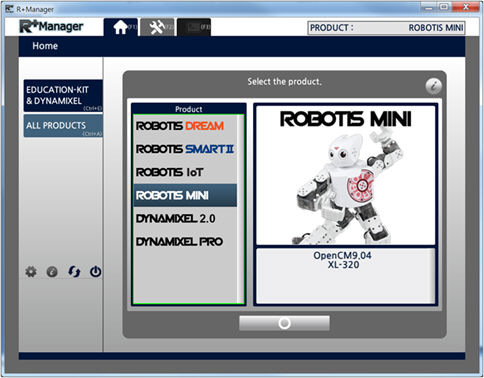
호환 소프트웨어
R+ Manager 2.0
다이나믹셀과 주변 장치를 제어하거나 설정하기 위해 사용되는 소프트웨어로, 다이나믹셀과 올로의 각종 부품들(접촉센서, LED모듈, 적외선센서 등)을 연결할 수 있습니다.
R+ Task 3.0
R+ Task 3.0을 사용해서 태스크 코드를 작성하거나 모션을 편집, 저장할 수 있습니다. 저장된 태스크와 모션 파일은 R+ Task 3.0을 통해 필요할 때 언제든 실행할 수 있으며, 각 부품들의 동작을 제어할 수 있습니다.
PC 연결
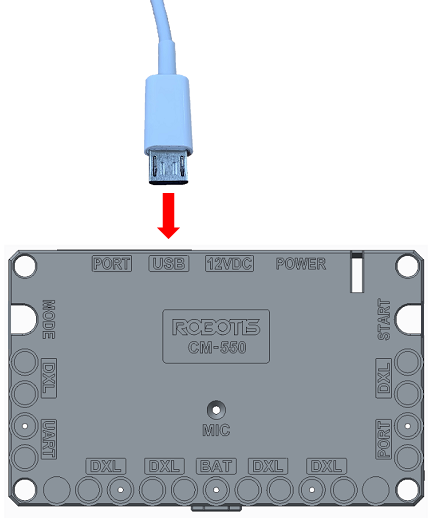
PC와 CM-550을 연결하기 위해서는 아래 세 가지 방법 중 한가지를 선택해서 사용할 수 있습니다.
- USB 케이블로 CM-550의
USB마이크로 USB 포트와 PC의 USB 포트를 연결하기 - PC에 BT-410 동글을 꽂아 블루투스로 CM-550 연결하기
- LN-101을 이용해서 CM-550의
UART외부통신 포트와 PC의 USB 포트를 연결하기
스마트 기기 연결
CM-550에는 BLE 블루투스 모듈이 내장되어 있습니다.
스마트기기 또는 BT-410 동글이 연결된 PC와 무선 연결이 가능합니다.
-
CM-550 제어기의 스위치를 눌러 전원을 켭니다.
-
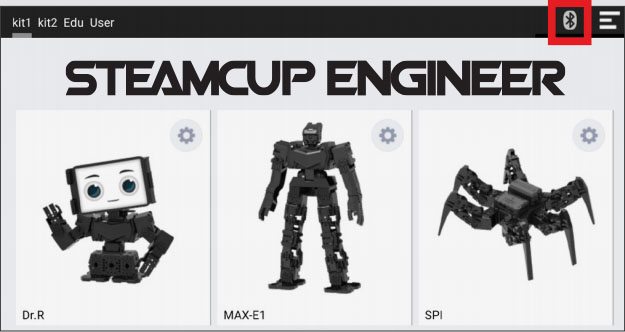
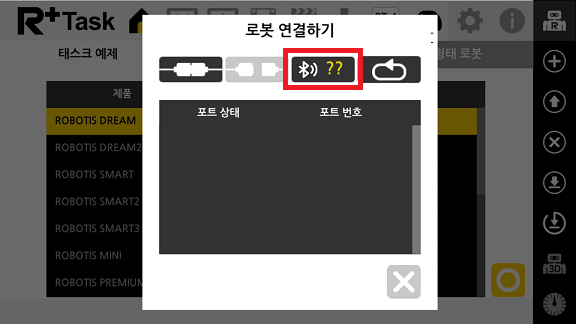
스마트 기기에서 앱을 실행하고 화면에 표시된 블루투스 아이콘을 누릅니다.
-
로보플러스 엔지니어 앱 사용시
-
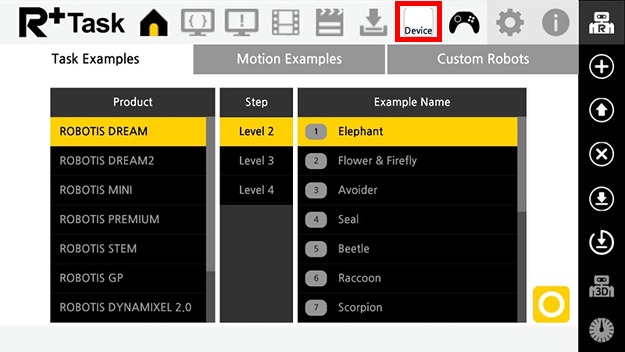
로보플러스 태스크 3 사용시
-
-
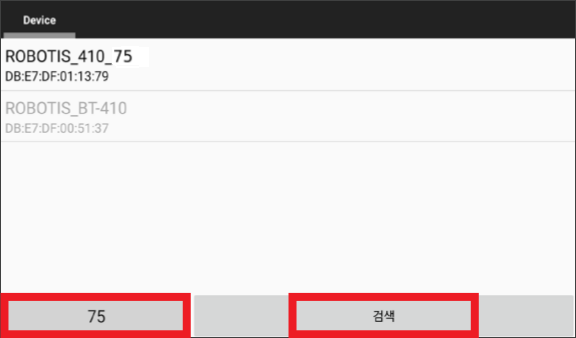
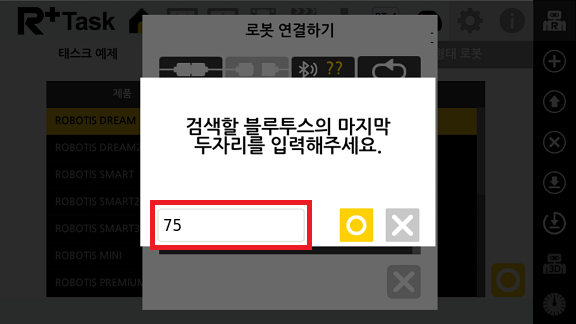
제어기에 표시된 숫자 (마지막 두자리)를 확인합니다.

-
확인한 숫자를 입력한 후
검색을 누릅니다.-
로보플러스 엔지니어 앱 사용시
-
로보플러스 태스크 3 사용시
-
-
검색된 목록을 찾아 선택하면 블루투스 통신 연결이 완료되고, 로봇이 실행됩니다.

충전하기
주의
- 반드시 제공된 충전기와 충전지(리튬폴리머 충전지)만 사용하십시오.
- 반드시 충전기에 전원을 연결한 다음 충전지를 연결해 주세요.
- 충전지를 처음 사용시 반드시 완전히 충전 후 사용해 주세요.
-
제품에 포함되어 있는 충전지(리튬폴리머 충전지)를 준비합니다.

-
그림과 같이 충전지를 충전기와 연결합니다.

-
그림과 같이 빨간색 LED가 표시되면 충전 중인 상태이며, 녹색 LED가 표시되면 충전이 완료된 상태입니다.

-
SMPS를 제어기에 직접 연결하면 충전지 없이 외부전원으로 로봇을 구동할 수 있습니다.
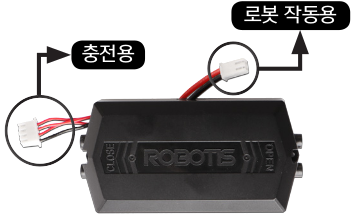
-
충전지는 충전용 커넥터와 로봇 작동용 커넥터가 연결되어 있습니다. 충전지를 충전할 때에는 반드시
로봇 작동용커넥터를 분리해 주세요.
충전지 잔량 확인하기
충전지 잔량에 따라 CM-550의 전원 LED가 다음과 같은 색상으로 표시됩니다.
- 파란색 : 70% 이상
- 녹 색 : 30% ~ 70%
- 빨간색 : 30% 이하(저전압 경고음이 발생합니다.)
참고 : 제어기의 블루투스 장치가 연결되지 않았을 때에는 전원 LED가 깜빡거립니다. 따라서, 전원 LED의 깜빡거림은 충전지 잔량과는 관계가 없습니다.
주의 : 충전이 완료되면 반드시 충전기와 충전지를 분리하여 보관해주시고, 충전중인 충전지를 사용해서 로봇을 구동하지 않도록 주의하세요.
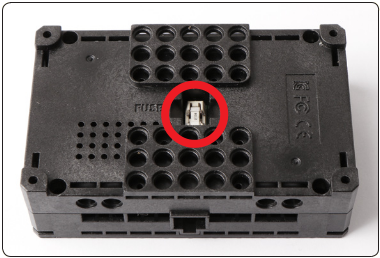
퓨즈 교체하기
CM-550에는 과전류가 흘러서 회로가 망가지는 것을 방지하기 위한 퓨즈(Fuse)가 있습니다.
만약 CM-550이 충전지로는 전원이 켜지지 않고, SMPS로만 전원이 켜진다면 퓨즈가 끊어진 것이니 교체해 주어야 합니다.
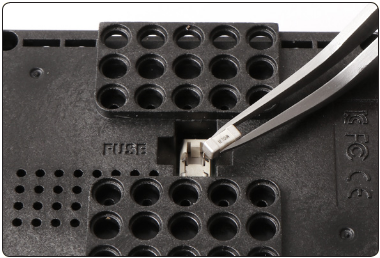
경고 : 반드시 어댑터와 충전지를 연결하지 않은 상태로 퓨즈를 교체해야 합니다.
제어기와 연결된 전원을 모두 분리하고 제어기 바닥면의 퓨즈를 핀셋으로 꺼낸 다음 새 퓨즈로 교체합니다.
Port 2 User Device Port 3 User Device Port 4 User Device Port 5 User Device Port 1 Temperature Sensor Port 2 Temperature Sensor Port 3 Temperature Sensor Port 4 Temperature Sensor Port 5 Temperature Sensor Port 1 Magnet Sensor Port 2 Magnet Sensor Port 3 Magnet Sensor Port 4 Magnet Sensor Port 5 Magnet Sensor Port 1 Motion Sensor Port 2 Motion Sensor Port 3 Motion Sensor Port 4 Motion Sensor Port 5 Motion Sensor Port 1 Color Sensor Port 2 Color Sensor Port 3 Color Sensor Port 4 Color Sensor Port 5 Color Sensor Port 1 Module Sensor Port 2 Module Sensor Port 1 Moisture Temperature Port 2 Moisture Temperature Port 1 Brightness Port 2 Brightness Port 3 Brightness Port 4 Brightness Port 5 Brightness Port 1 RED Brightness Port 2 RED Brightness Port 1 BLUE Brightness Port 2 BLUE Brightness