예제
장치 설정(RH-P12-RN(A))
예제 실행을 위해 아래와 같이 장치의 컨트롤 테이블 값을 변경해야 합니다.
- ID = 1
- Baudrate = 2 Mbps
팁 : 장치의 컨트롤 테이블 값을 변경하기 위해서, R+ Manager 2.0 (윈도우) 또는 다이나믹셀 위자드 2.0 (윈도우, 리눅스, 맥OS)을 사용하세요.
통신포트 설정
윈도우즈 : 예제의 통신 포트가 기본값으로 “COM4“로 되어 있습니다. 연결된 통신 장치가 COM4 가 아닐 경우 설정에서 통신 포트를 COM4 로 변경하거나, 소스 상의 DEVICE_NAME 값을 변경하세요.
리눅스 : 예제의 통신 포트가 “/dev/ttyUSB0“로 되어 있습니다. 연결된 통신 장치가 /dev/ttyUSB0 가 아닐 경우 소스 상에서 DEVICE_NAME 값을 변경하세요.
...
#if defined(__linux__)
#define DEVICE_NAME "/dev/ttyUSB0"
#elif defined(_WIN32) || defined(_WIN64)
#define DEVICE_NAME "COM4"
#endif
...
RH-P12-RN_Example/rh-p12-rna.cpp
윈도우즈 예제
다운로드
- Git 공식 사이트에서 Git Client를 설치 하세요.
- Git client를 실행합니다.
- 제공되는 URL을 사용하여, 저장소를 다운로드 하세요.
참고: Git Client 설치가 어렵다면, RH-P12-RN_Example-master.zip에서 압축폴더를 직접 다운로드 할 수 있습니다.
빌드 및 실행
-
Visual Studio 프로그램을 설치 하세요.
윈도우즈 예제는 Visual Studio 2017에서 테스트 되었습니다.
- RH-P12-RN_Example\win64\RH-P12-RN-Example.sln 파일을 더블클릭하여 솔루션 열어 주세요.
- 솔루션을 빌드 후 실행 하세요.
- Windows SDK 버전이 달라서 아래의 에러메세지가 발생한 경우
error MSB8036: Windows SDK 버전 10.0.14393.0을(를) 찾을 수 없습니다. 필요한 버전의 Windows SDK를 설치하거나, 솔루션을 마우스 오른쪽 단추로 클릭하고 [솔루션 대상 변경]을 선택하거나 프로젝트 속성 페이지에서 SDK 버전을 변경하세요.프로젝트의 속성 페이지에서 아래와 같이 Windows SDK 버전을 설치된 버전으로 변경 후 다시 빌드 후 실행 하세요.
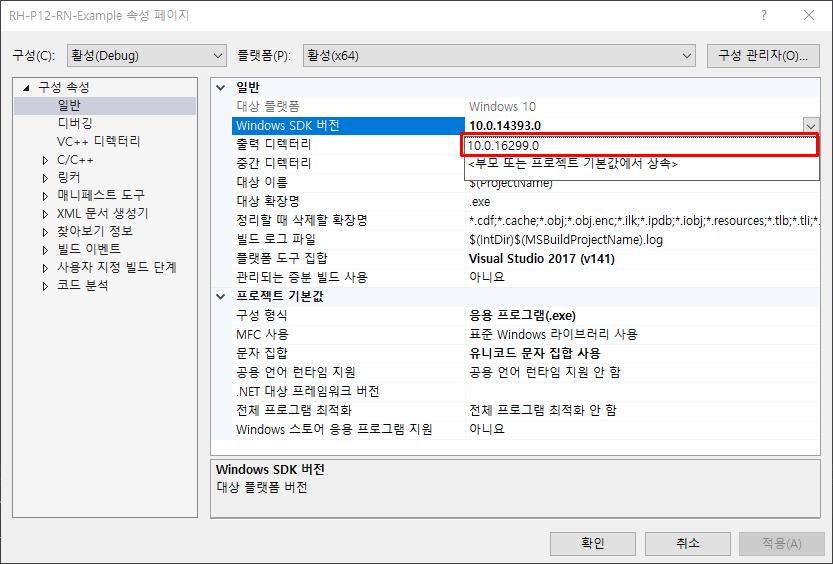
- Windows SDK 버전이 달라서 아래의 에러메세지가 발생한 경우
실행 화면
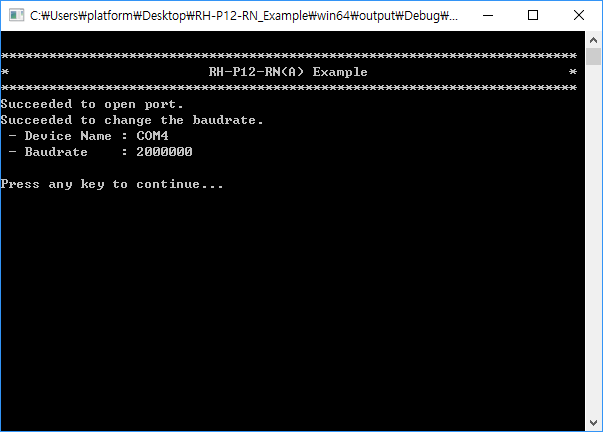
에러메세지가 발생했을 경우 에러 메시지를 확인하세요. 장치 설정 혹은 통신 포트 설정을 다시 확인하세요.
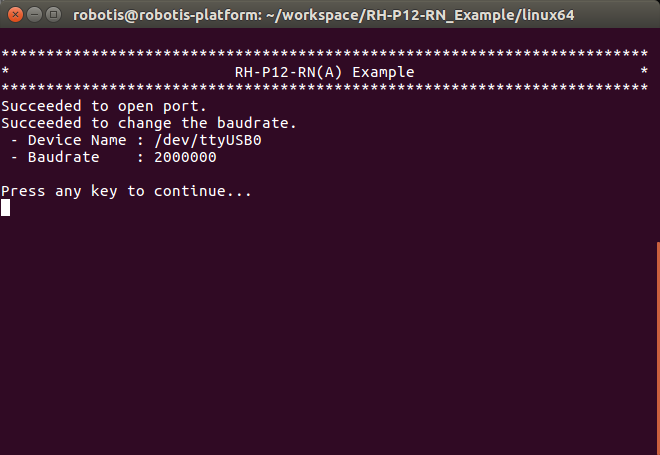
- 연결후 실행화면 : 포트이름 및 Baudrate 정보 표시. 키보드의 아무키를 누르면, 제어모드 화면으로 넘어갑니다.
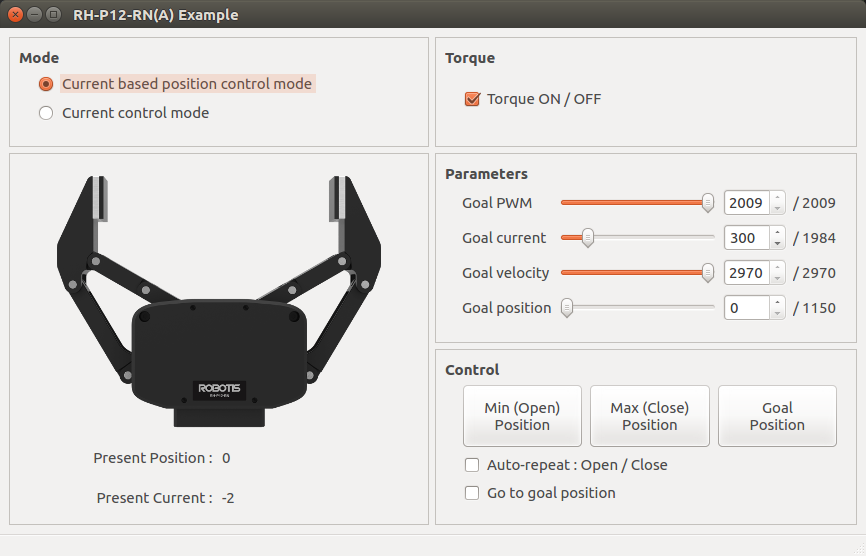
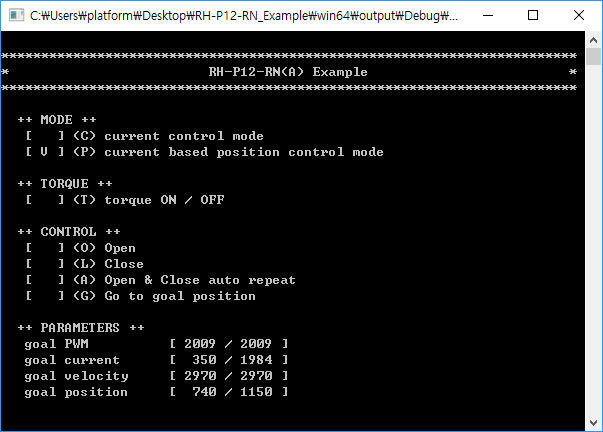
- 전류기반 위치 제어 모드 실행화면
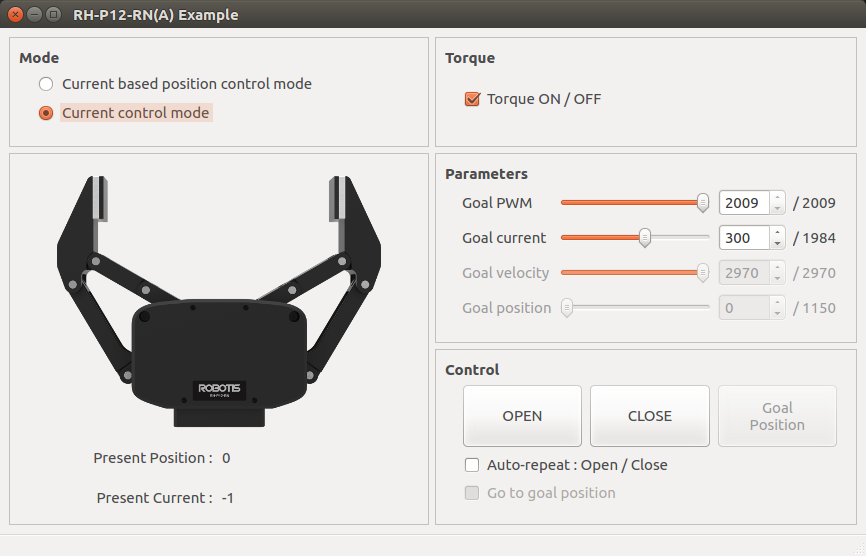
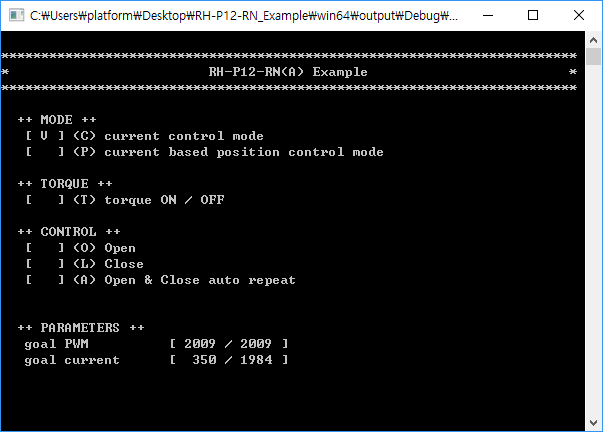
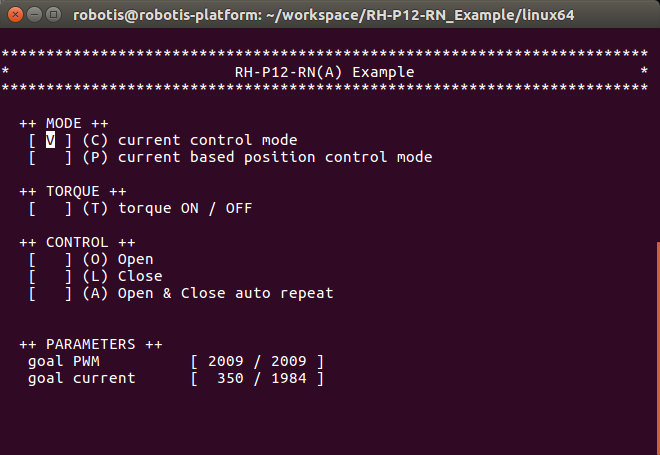
- 전류제어 모드 실행화면
동작
실행화면의 이미지(전류기반 위치 제어모드 및 전류제어 모드)를 참고 하세요.
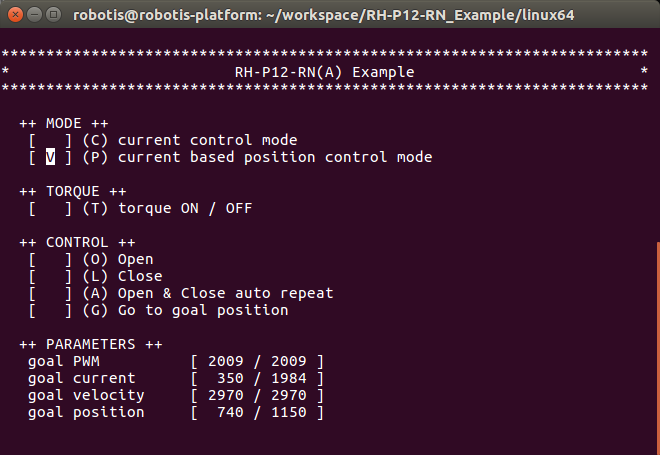
++ MODE ++
- (C) current control mode : 체크 시 전류제어 모드로 동작 합니다.
- (P) current based position control mode : 체크 시 전류기반 위치 제어 모드로 동작 합니다.
++ TORQUE ++
- (T) torque ON / OFF : 체크 시 토크가 켜지고, 체크 해제시 꺼집니다.
++ CONTROL ++
- (O) Open : 체크 시 손가락을 열고, 체크가 해제됩니다.
- (L) Close : 체크 시 손가락을 닫고, 체크가 해제됩니다.
- (A) Open & Close auto repeat : 체크 시 자동으로 손가락을 열었다 닫았다를 반복합니다.
- (G) go to goal position : 체크 시, PARAMETERS 의 goal position 값이 변경되면 장치에 즉시 반영 됩니다.
++ PARAMETERS ++
- goal PWM : 값이 변경되면 장치의 goal PWM 에 해당 값을 write 합니다.
- goal current : 값이 변경되면 장치의 goal current 에 해당 값을 write 합니다
- goal velocity : 값이 변경되면 장치의 goal velocity 에 해당 값을 write 합니다
- goal position : (G) go to goal position 이 체크된 상태에서, 값이 변경되면 장치의 goal position 에 해당 값을 write 합니다.
입력방법
- 키보드의
↑/↓방향 키를 이용하여 입력란을 이동할 수 있습니다. 스페이스를 눌러서, MODE / TORQUE / CONTROL 을 체크 및 체크해제를 할수있습니다.- 단축키
C,P,T,O,L,A로 체크 및 체크해제를 할수있습니다. - PARAMETERS 값은
[키와]키를 이용하여 1 씩 값을 증감 시킬 수 있으며,{키와}키를 이용하여 10 씩 값을 증감시킬 수 있습니다.
리눅스 예제
리눅스에서 RH-P12-RN(A)의 예제를 사용하기위한 과정을 다룸. 터미널을 실행하여,각 단계에서 제공되는 커맨드를 입력 하세요.
준비
- 다이나믹셀 SDK를 설치하세요.
$ git clone https://github.com/ROBOTIS-GIT/DynamixelSDK $ cd DynamixelSDK/c++/build/linux64 $ sudo make install - USER_ID 를 dialout 그룹에 등록하세요.
$ sudo usermod -aG dialout USER_ID - 리눅스를 재시작 또는 로그아웃 후 다시 로그인 하면, USER_ID 가 dialout 그룹에 등록되어 포트(/dev/ttyUSB0)에 접근가능한 권한을 얻습니다..
다운로드
$ git clone https://github.com/ROBOTIS-GIT/RH-P12-RN_Example
빌드
$ cd RH-P12-RN_Example/linux64
$ make
실행
$ ./rh-p12-rna_example
실행화면
에러메세지가 발생했을 경우 에러 메시지를 확인하세요. 장치 설정 혹은 통신 포트 설정을 다시 확인하세요.
- 연결후 실행화면 : 포트이름 및 Baudrate 정보 표시. 키보드의 아무키를 누르면, 제어모드 화면으로 넘어갑니다.
- 전류기반 위치 제어 모드 실행화면
-
전류제어 모드 실행 화면
- 각 입력란의 동작 및 입력 방법은 윈도우 예제를 참고하세요.
ROS GUI 예제
예제를 사용하기위한 과정을 다룸. 터미널을 실행하여,각 단계에서 제공되는 커맨드를 입력 하세요.
준비
- 유저그룹(USER_GROUP)의 real-time scheduling priority(rtprio)을 설정하세요.
$ sudo bash -c 'echo "@USER_GROUP - rtprio 99" > /etc/security/limits.d/robotis-rtprio.conf' - USER_ID 를 dialout 그룹에 등록하세요
$ sudo usermod -aG dialout USER_ID - 리눅스를 재시작 또는 로그아웃 후 다시 로그인 하면, USER_ID 가 dialout 그룹에 등록되어 포트(/dev/ttyUSB0)에 접근가능한 권한을 얻습니다.
다운로드
$ cd ~/catkin_ws/src
$ git clone https://github.com/ROBOTIS-GIT/DynamixelSDK
$ git clone https://github.com/ROBOTIS-GIT/ROBOTIS-Framework
$ git clone https://github.com/ROBOTIS-GIT/ROBOTIS-Framework-msgs
$ git clone https://github.com/ROBOTIS-GIT/RH-P12-RN-A
빌드
$ cd ~/catkin_ws
$ catkin_make
실행
- 터미널을 띄우고, manager를 실행하세요
$ roslaunch rh_p12_rn_a_manager rh_p12_rn_a_manager.launch - 새로운 터미널을 띄우고 ROS GUI 예제를 실행하세요.
$ rosrun rh_p12_rn_a_gui rh_p12_rn_a_gui