태스크 프로그래밍
새 파일 만들기
- 홈 탭으로 이동합니다 (프로그램 시작시 홈 탭에서 시작됩니다).
-
새로 만들기버튼을 클릭합니다.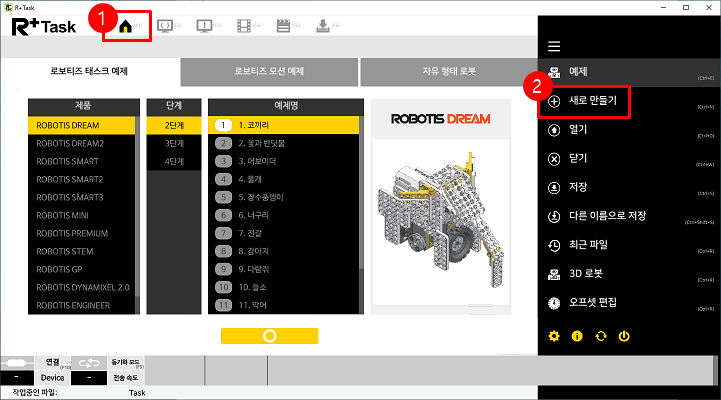
- 프로토콜 버전과 제어기를 선택합니다.
-
확인버튼을 클릭하면 새로운 태스크 파일이 생성됩니다.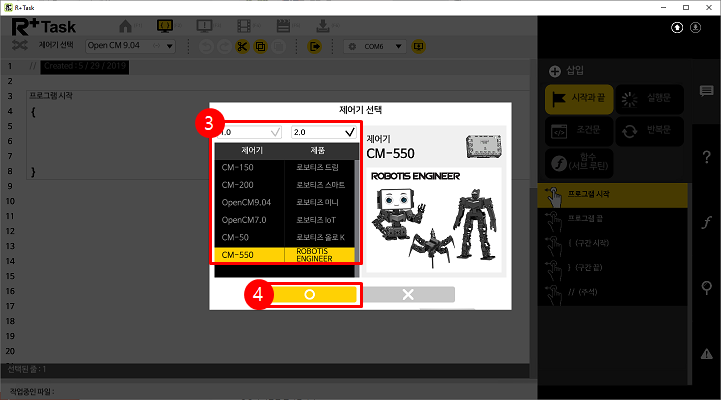
태스크 예제 열기
- 홈 탭으로 이동합니다 (프로그램 시작 시 홈 탭에서 시작됩니다).
예제버튼을 클릭합니다.- 원하는 제품과 단계, 예제 명을 선택합니다.
-
확인버튼을 클릭합니다.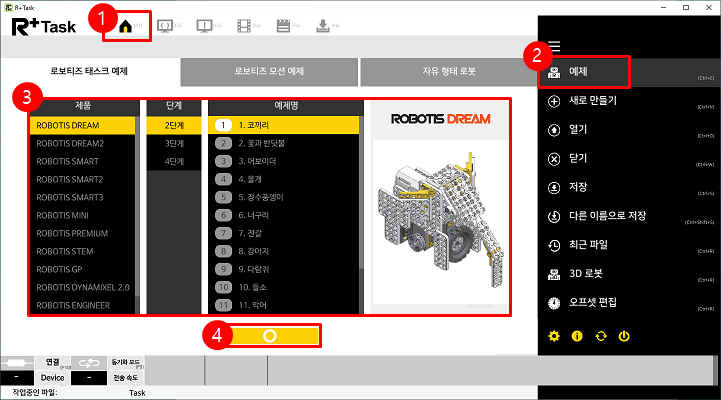
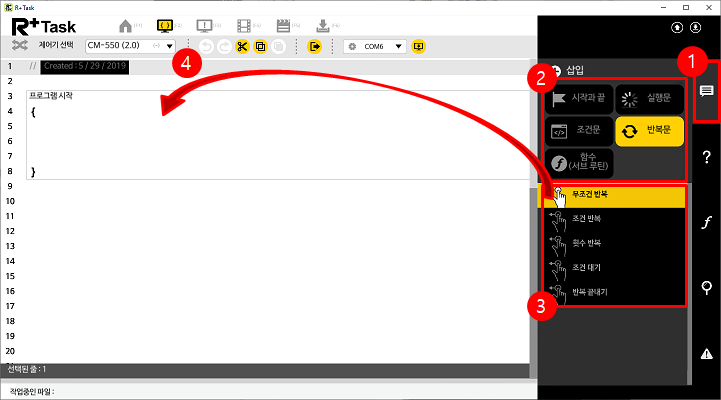
명령어 삽입/변경
- 우측의
명령어탭을 클릭합니다 (혹은 명령어를 삽입할 위치를 더블 클릭합니다). - 삽입할 명령어의 종류를 선택합니다.
- 사용하고자 하는 세부 명령어를 더블클릭하거나
-
세부 명령어를 드래그하여 원하는 위치에 드롭합니다.
여러 줄 선택
-
줄 번호를 드래그(drag)하여 여러 줄을 선택합니다.
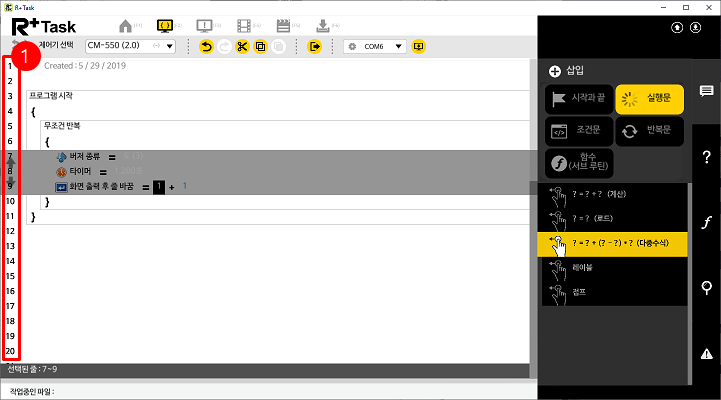
-
소스코드를 직접 클릭하면 라인선택이 취소됩니다.
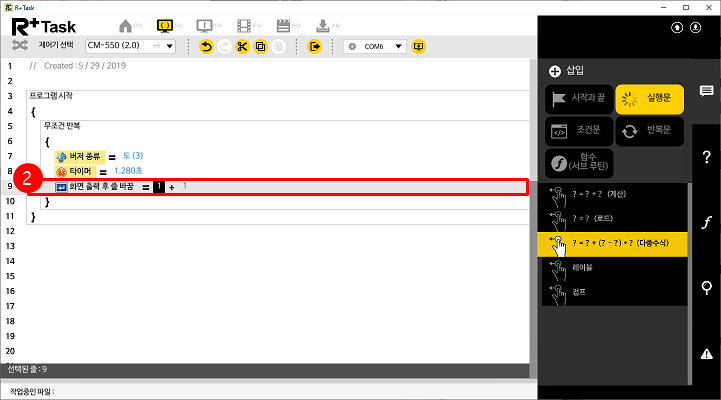
줄 삽입/지우기
- 줄 삽입(혹은 줄 지우기)를 실행할 위치를 선택하고 마우스 오른쪽 버튼을 클릭하면 추가 메뉴가 나타납니다.
-
줄 삽입을 선택하면 선택된 줄의 위쪽에 새로운 줄이 삽입됩니다. (단축키 :Space)
줄 지우기를 선택하면 선택된 줄이 삭제됩니다. (단축키 :Delete)
줄 내용 지우기를 선택하면 줄을 남겨두고 코드만 삭제됩니다. (단축키 :Backspace)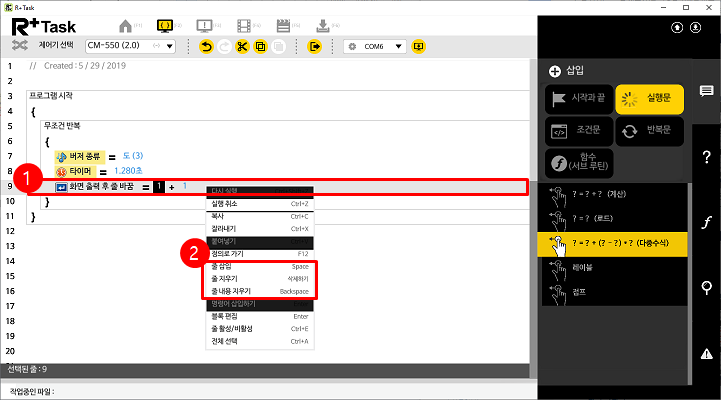
줄 활성/비활성
- 활성/비활성을 실행할 위치를 선택하고 마우스 오른쪽 버튼을 클릭하면 추가 메뉴가 나타납니다.
-
줄 활성/비활성을 클릭하면 선택된 줄의 활성/비활성 상태가 전환됩니다. (단축키 :Ctrl+E)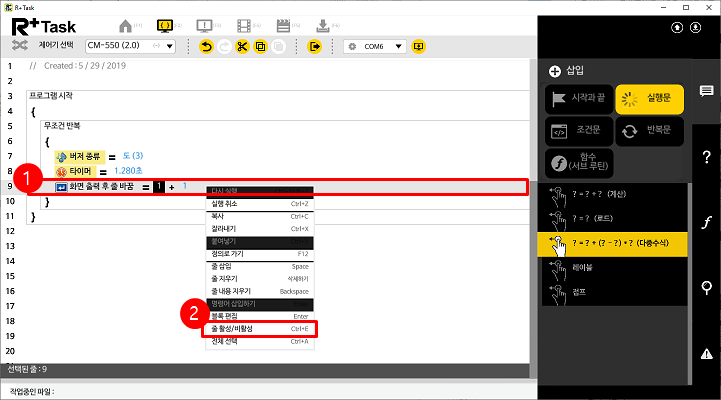
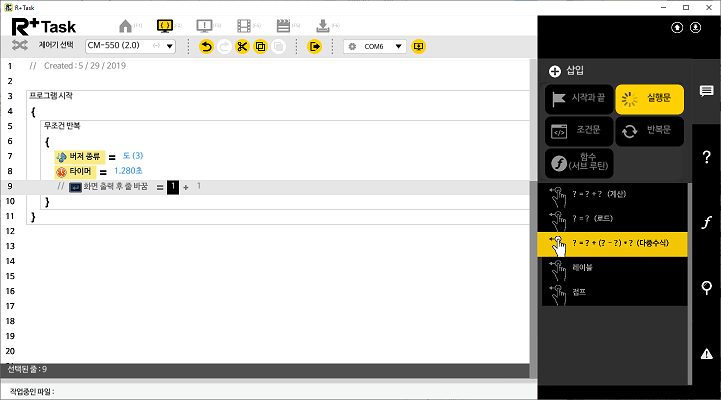
-
비활성화된 코드는 주석처리되어 회색으로 표시되며 컴파일시 제외됩니다.
복사/잘라내기/붙여넣기
- 복사(또는 잘라내기)를 실행할 줄을 선택하고 마우스 오른쪽 버튼을 클릭하면 추가 메뉴가 나타납니다.
-
복사(또는 잘라내기)를 선택하면 선택된 줄이 클립보드에 복사됩니다.
잘라내기를 선택한 경우 선택된 줄이 삭제되며 클립보드에 복사됩니다. -
상단 툴바의
잘라내기,복사버튼을 사용할 수도 있습니다. (단축키 :Ctrl+C,Ctrl+X)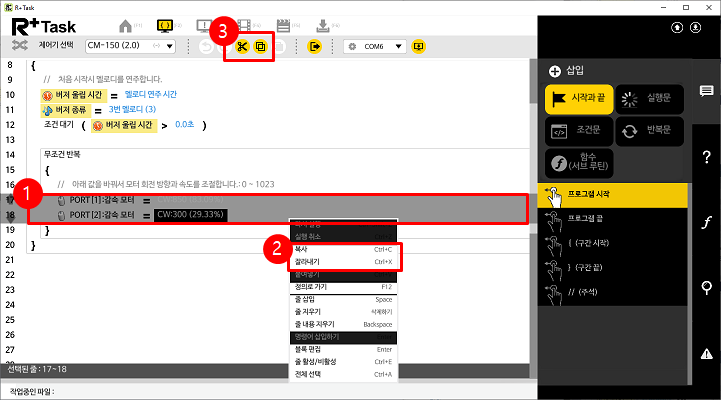
- 붙여넣기를 진행할 줄을 선택하고 마우스 오른쪽 버튼을 클릭하면 추가 메뉴가 나타납니다.
붙여넣기를 선택하면 클립보드에 복사된 내용이 선택된 줄에 복사됩니다.-
상단 툴바의
붙여넣기버튼을 사용할 수도 있습니다. (단축키 :Ctrl+V)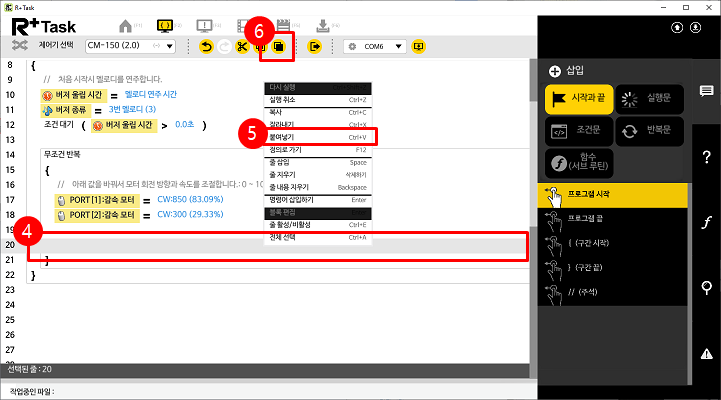
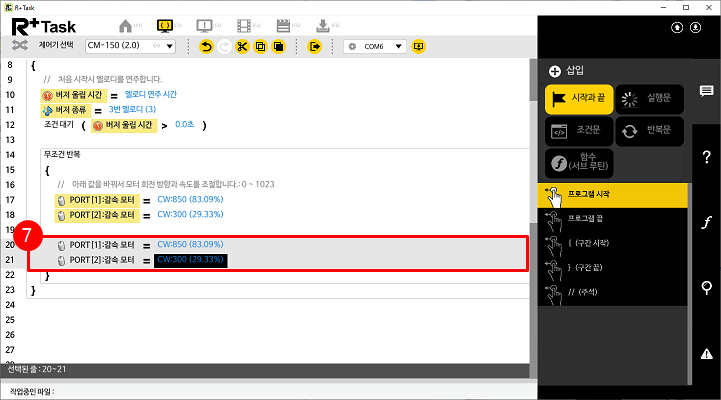
-
그림과 같이 복사한 코드가 삽입됩니다.
실행취소/다시실행
- 추가 메뉴에서
실행취소를 선택하거나 -
상단 툴바의
실행취소버튼을 클릭하면 한 단계 이전으로 되돌릴 수 있습니다. (단축키 :Ctrl+Z)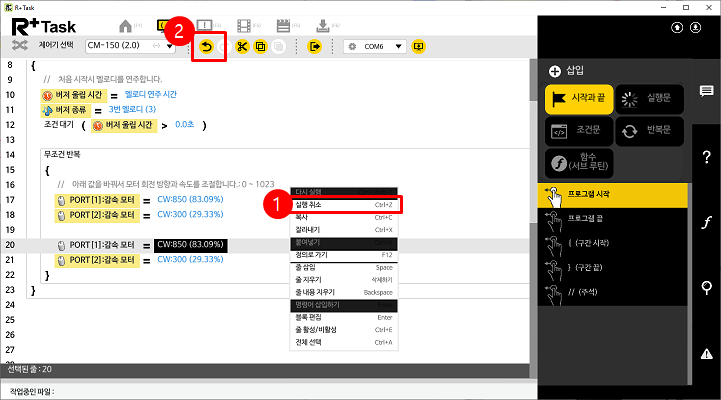
- 추가 메뉴의
다시실행을 선택하거나 -
상단 툴바의
다시실행버튼을 클릭하면 되돌린 코드를 다시 실행할 수 있습니다. (단축키 :Ctrl+Shift+Z)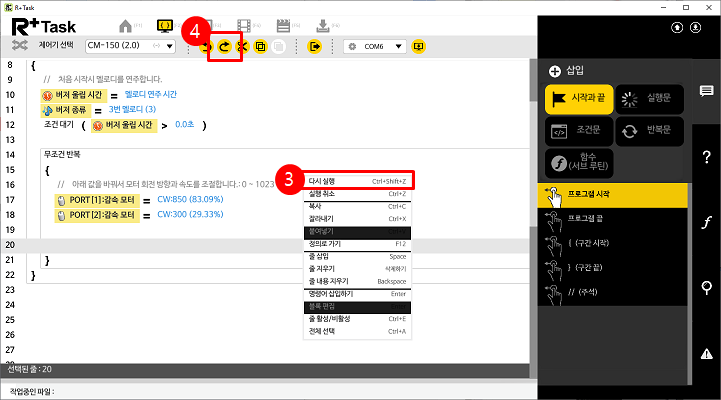
태스크 다운로드 하기
장치 선택버튼을 클릭합니다. (단축키 :Shift+F5)- 로봇 연결하기 창이 나타나면 로봇이 연결된 포트 종류와 포트 번호를 더블클릭합니다.
-
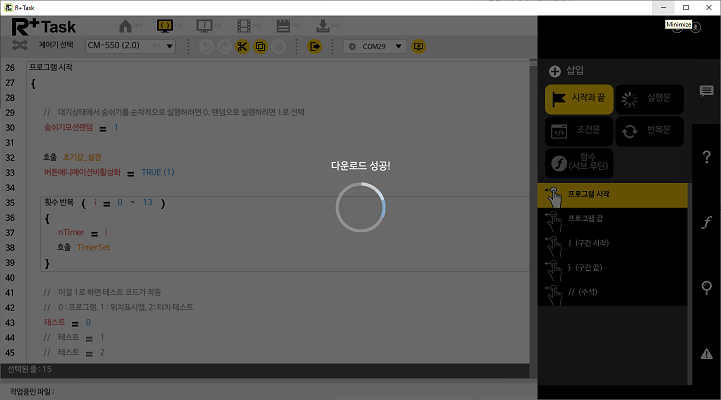
제어기에 연결이 완료되고 창이 닫히면
다운로드버튼으로 프로그램을 제어기로 다운로드합니다.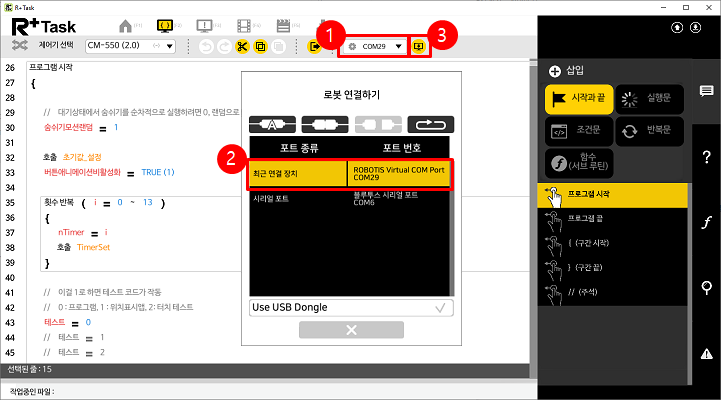
-
다운로드 완료후, 연결된 선을 분리합니다. 그리고 제어기를 다시 켜서, 태스크를 실행시켜주세요. (일부 제어기의 경우 다운로드가 완료되면 제어기가 종료됩니다).
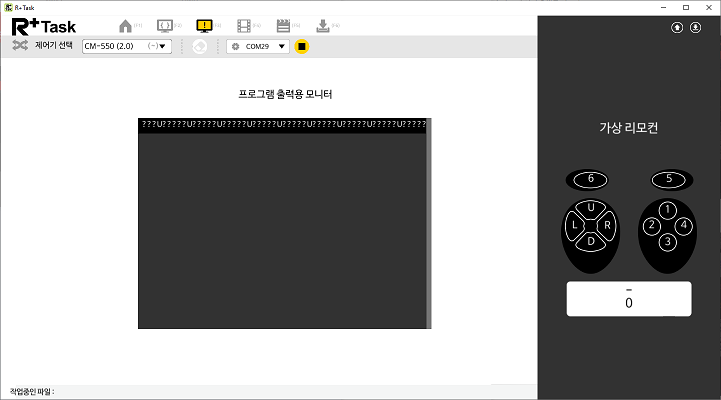
프로그램 출력보기
- 디버깅 탭으로 이동합니다.
장치 선택버튼을 클릭합니다. (단축키 :Shift+F5)- 로봇 연결하기 창이 나타나면 로봇이 연결된 포트 종류와 포트 번호를 더블클릭합니다.
-
제어기에 연결이 완료되고 창이 닫히면
터미널 시작 / 정지버튼을 클릭합니다. (단축키 :Ctrl+F6)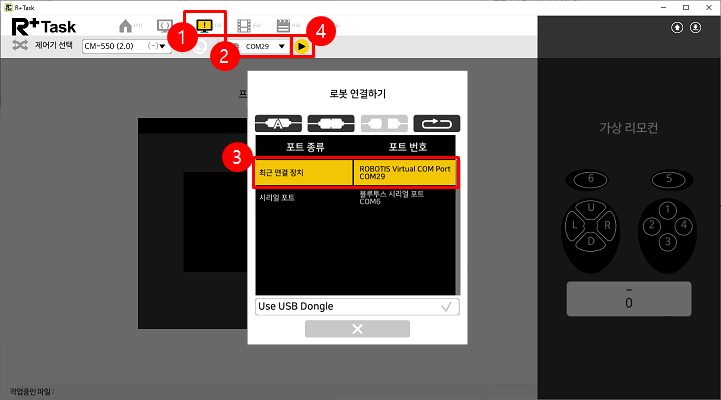
-
로봇이 연결되면
출력 모니터와가상 리모컨이 활성화 됩니다.