개요
‘STEAMCUP 실과로봇’은 우수한 로봇기술과 교육 노하우를 바탕으로 만든 초등학교 실과 교육용 로봇 키트입니다.
기존 소프트웨어 중심의 단순한 프로그래밍 수업의 한계를 벗어나 로봇과 스마트 기기의 다양한 상호작용을 통해 로보플러스 태스크와 엔트리 코딩으로 능동적인 자기주도 학습이 가능한 로봇/코딩교육 솔루션입니다.
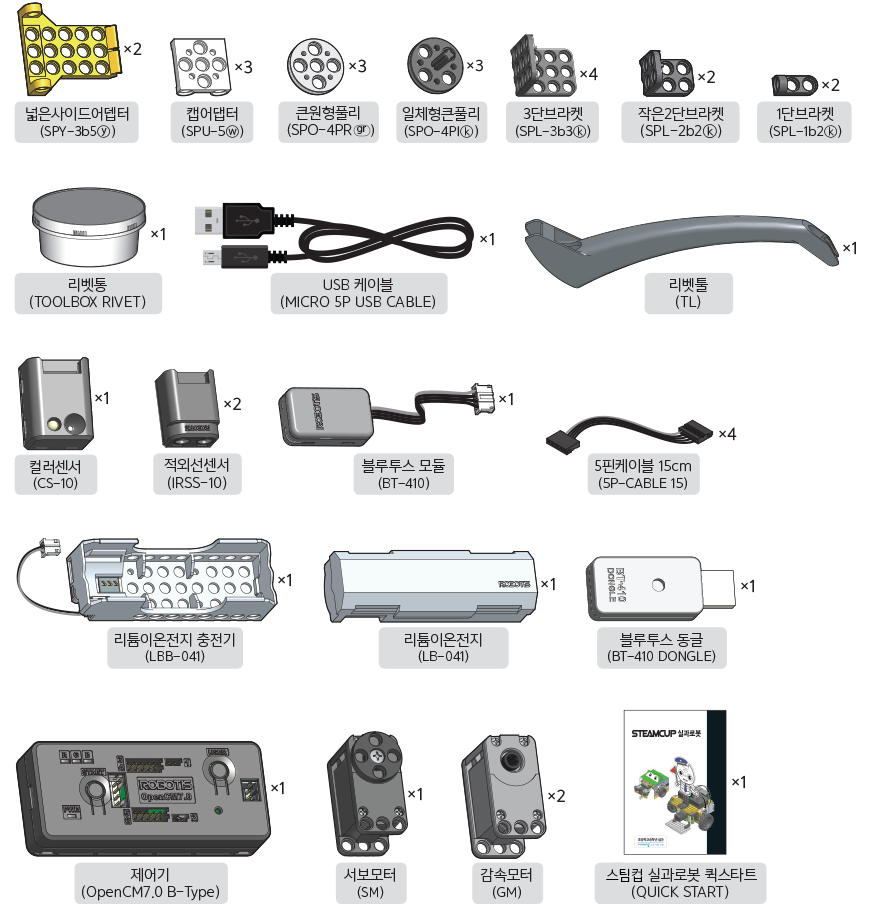
실과로봇에는 스마트 기기와 무선 통신이 가능한 블루투스 모듈이 포함되어 있습니다. 또한 적외선센서, 컬러센서, 서보모터, 감속 모터 등이 포함되어 다양한 하드웨어 장치를 구현할 수 있습니다.
12가지의 예제별 코딩 학습을 통해 로봇의 동력과 전기, 무게중심의 이해, 힘의 변환과 전달, 6족 보행 로봇의 기본 개념 등의 원리를 재미있게 학습할 수 있습니다.
학습을 통하여 자동문의 작동원리, 스쿠터의 조향 장치, 로봇청소기 등을 구현하여 생활 속 장치의 필요성, DIY의 제작 등의 수업을 할 수 있고 스마트 기기로 코딩이 가능한 로보플러스 태스크와 엔트리 프로그램으로 다양한 기기에서의 코딩을 통한 프로그램 학습, 응용하기 등의 과정을 제공합니다.
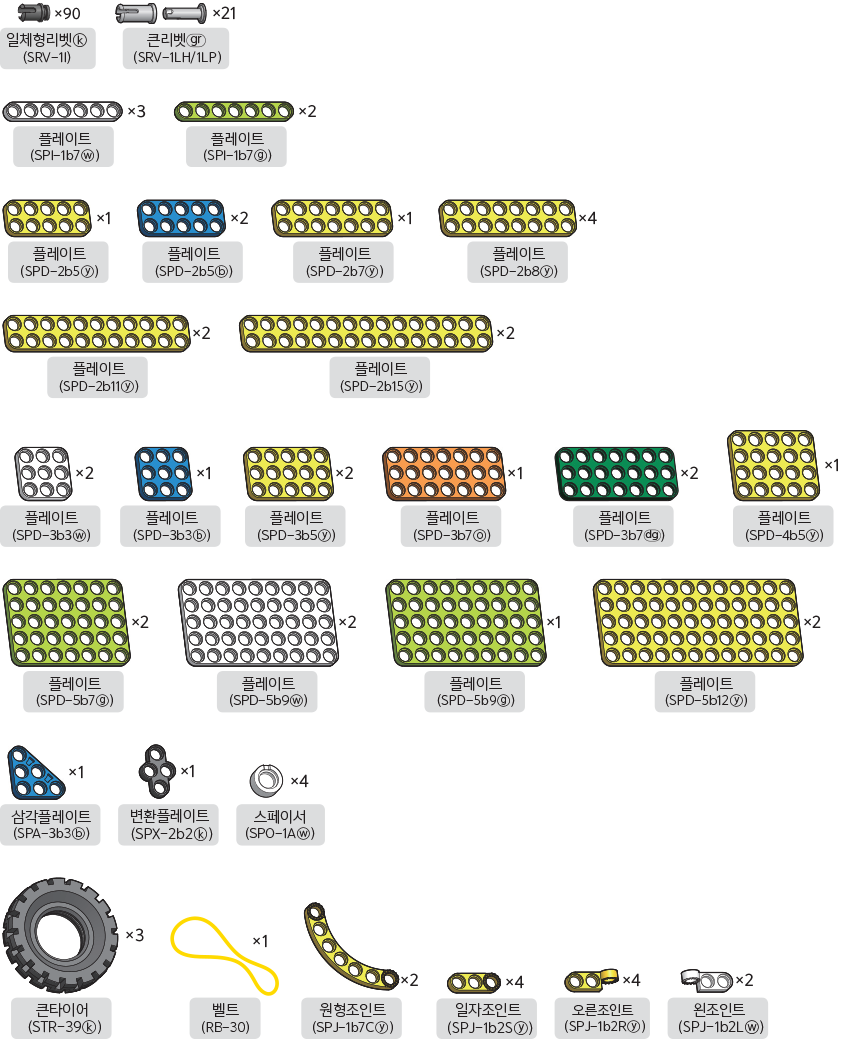
부품 목록
엔트리로 작동하기
- 엔트리는 누구나 무료로 소프트웨어 교육을 받을 수 있는 플랫폼입니다.
- 학생들이 소프트웨어를 쉽고 재미있게 학습하고, 선생님들은 효과적으로 학생들을 가르칠 수 있습니다.
- 엔트리를 통하여 STEAMCUP 실과로봇의 다양한 센서와 구동장치를 학습하고 원하는대로 구현할 수 있습니다.
참고 : 엔트리는 웹 페이지에서 사용가능한 온라인 버전과 PC에서 사용가능한 오프라인 버전 두 가지가 있습니다.
온라인 버전
-
웹 브라우저를 실행한 후 엔트리 홈페이지(www.playentry.org)에 접속합니다.
-
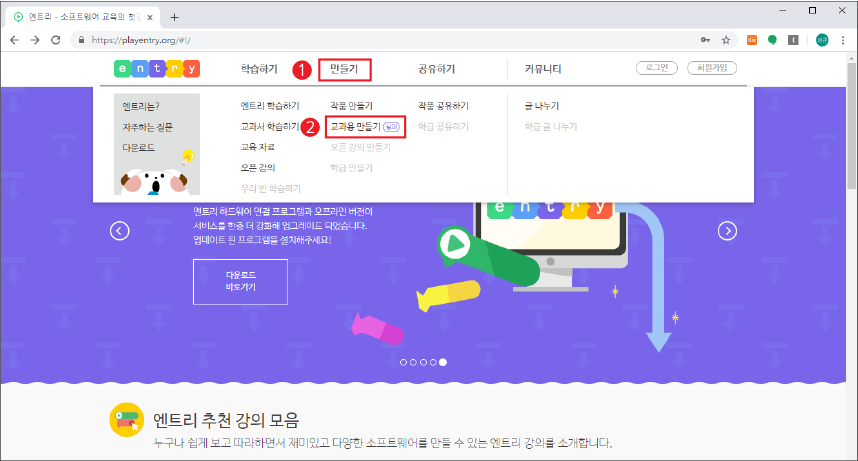
메뉴에서 만들기 > 교과용 만들기를 선택합니다.
-
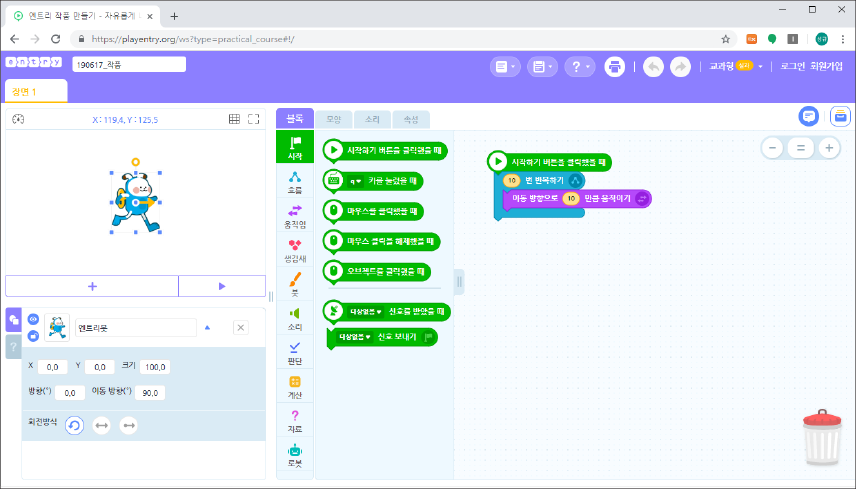
아래와 같이 온라인 엔트리가 실행됩니다.
오프라인 버전
PC에 엔트리 설치하기
-
엔트리 홈페이지(www.playentry.org)에 접속 후 메뉴에서
다운로드를 선택합니다
-
운영체제에 맞는 프로그램을 선택하여 다운로드합니다.
참고 : 윈도우의 경우 운영체제 확인은
내 컴퓨터아이콘을 오른쪽 클릭 한 후속성또는제어판 > 시스템 및 보안 > 시스템에서 확인할 수 있습니다.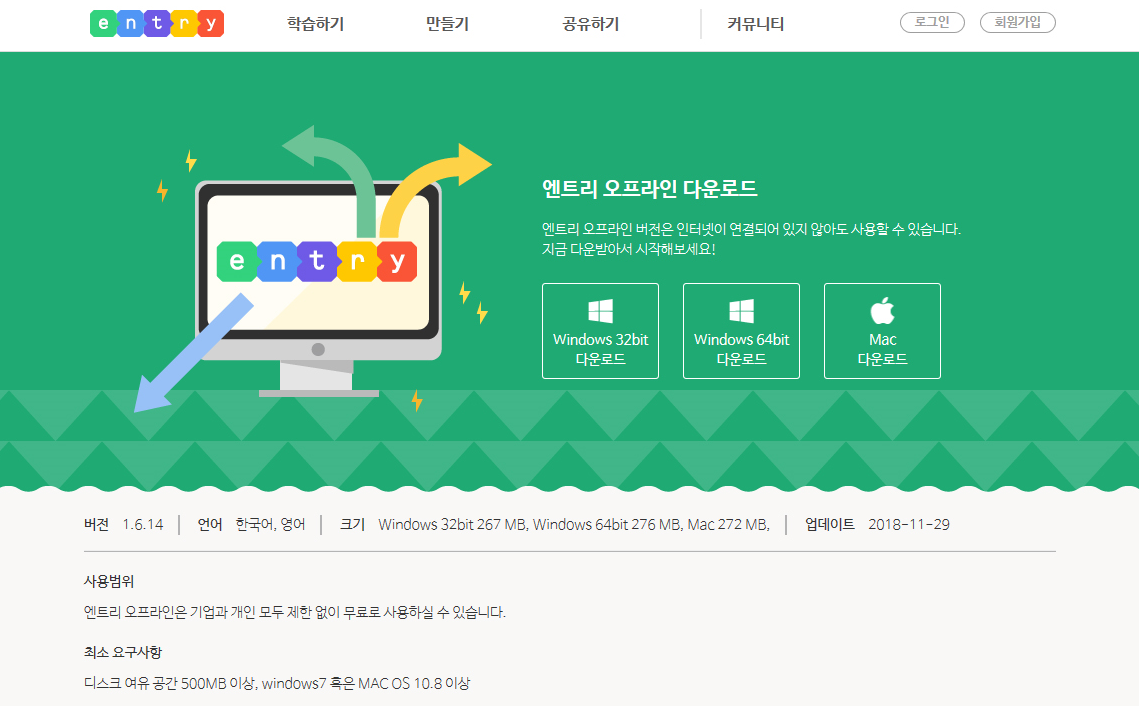
-
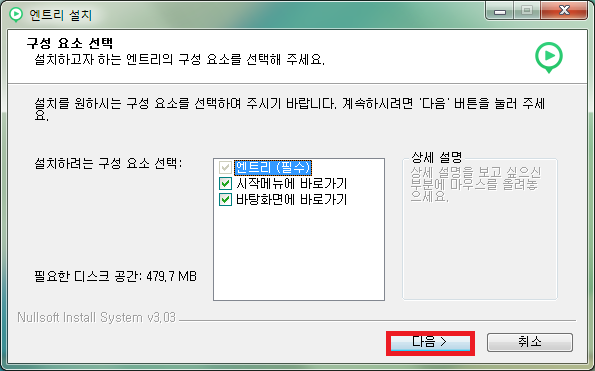
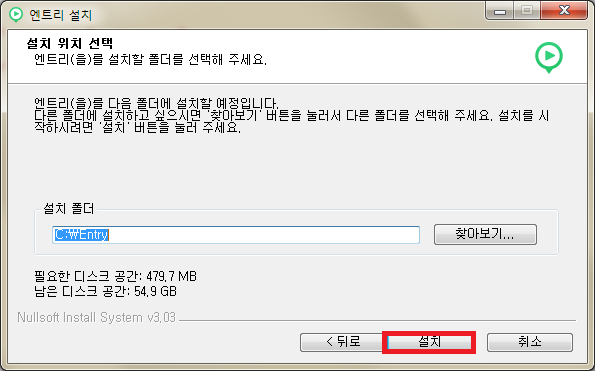
다운로드한 파일을 실행하고 아래와 같이 엔트리를 PC에 설치합니다
PC에 예제 다운로드하기
교육자료 다운로드 항목에서 작동시키고자 하는 로봇의 예제 프로그램을 찾아 다운로드합니다.
엔트리에서 예제 불러오기
-
엔트리 앱을 실행한 후 엔트리 만들기 환경에서
교과형을 선택 후 확인을 누릅니다.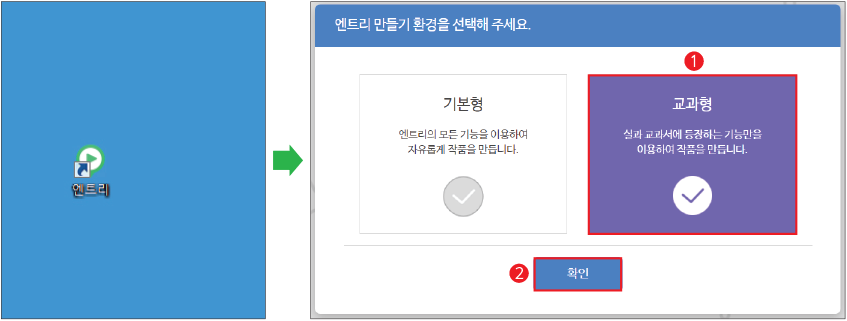
앤트리 온라인버전 사용자는 온라인 버전으로 교과형 앤트리 만들기 환경을 실행해주세요.
-
엔트리 창이 열리면
파일에서오프라인 작품 선택하기를 선택합니다.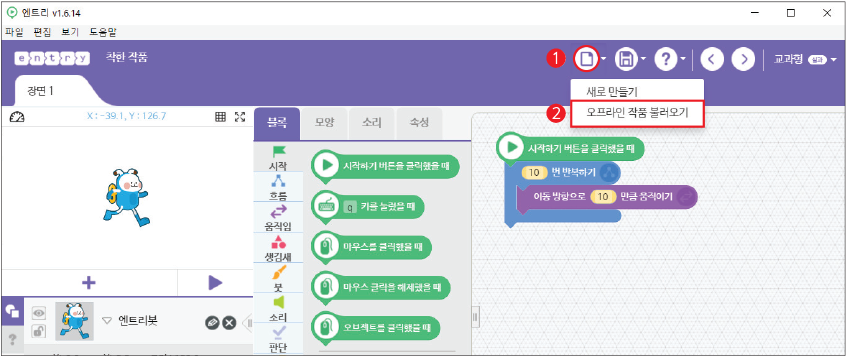
온/오프라인 엔트리로 동일하게 진행가능합니다.
-
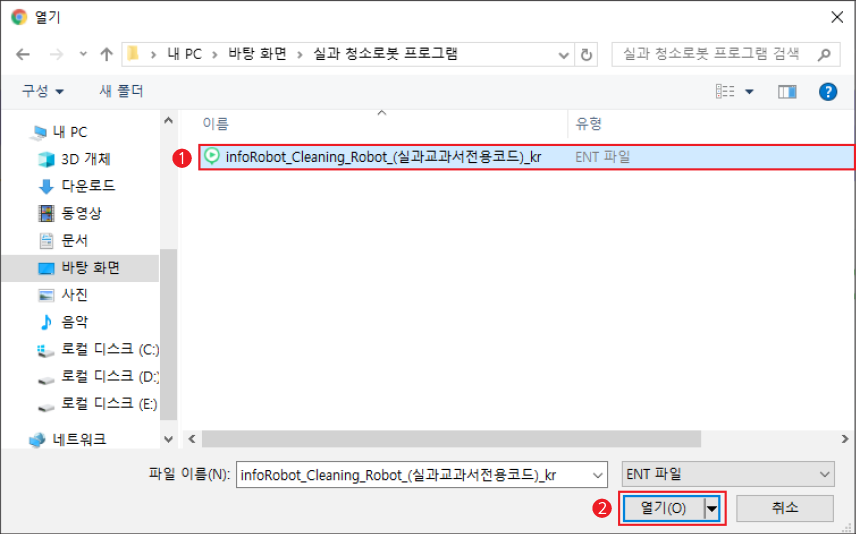
다운로드한 예제 프로그램이 저장된 위치를 찾아 불러옵니다 (예시: 청소로봇)
PC에 블루투스 연결하기
-
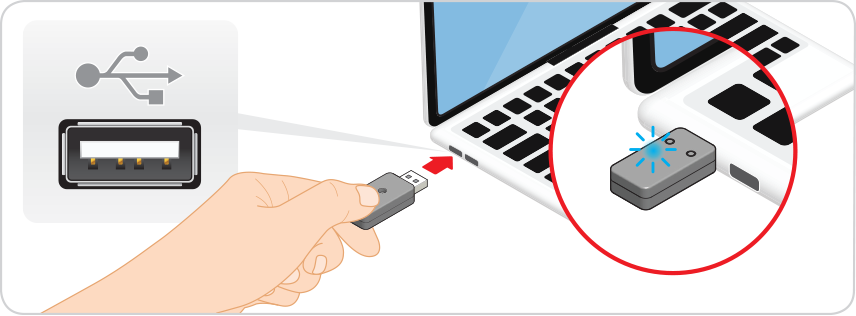
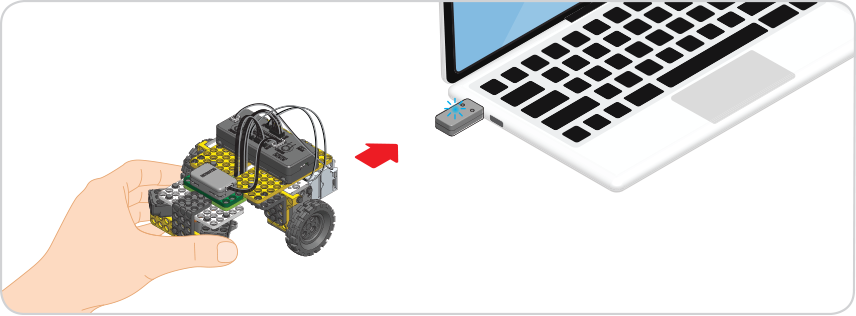
PC의 USB 단자에 블루투스 동글을 연결하면 파란빛이 깜빡입니다.
-
청소 로봇의 전원을 켠 후 블루투스 동글에 가까이 가져가면 자동으로 통신 연결(페어링)을 시도합니다.
-
블루투스 모듈과 블루투스 동글에 모두 파란 불이 켜진 후 깜빡이지 않으면 통신 연결이 완료됩니다.
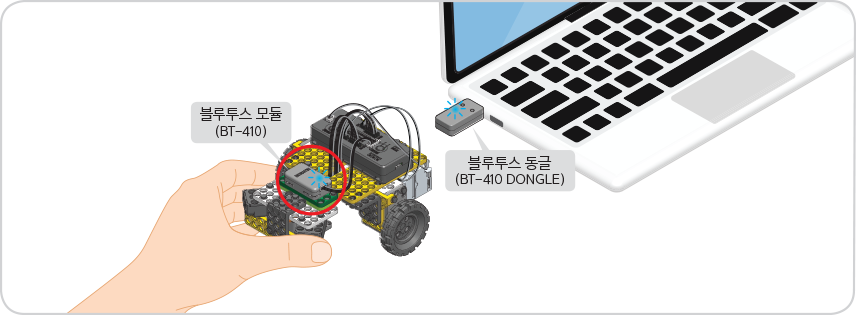
통신 연결이 완료된 후에는 로봇과 PC의 거리가 멀어져도 통신이 끊어지지 않습니다.
엔트리에 로봇 연결하기
-
엔트리에서
로봇을 선택하고연결 프로그램 열기를 선택합니다.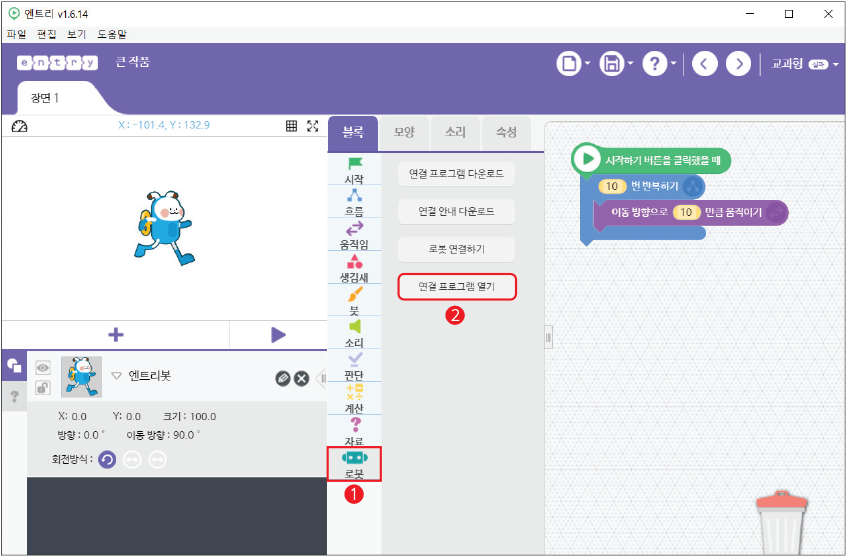
-
목록에서
STEAMCUP 실과로봇을 찾아 선택합니다.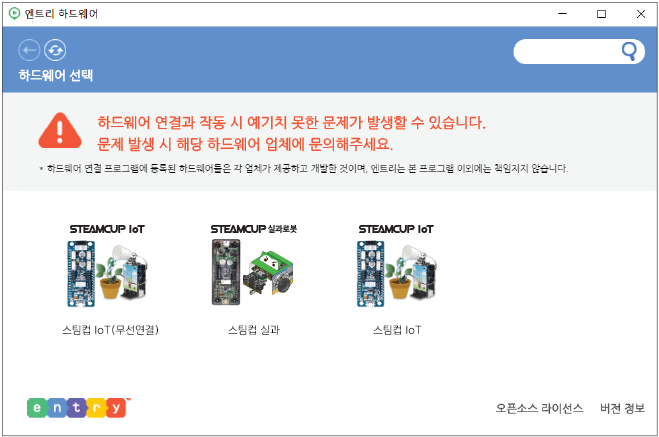
-
검색된 포트를 선택하고
연결을 누릅니다.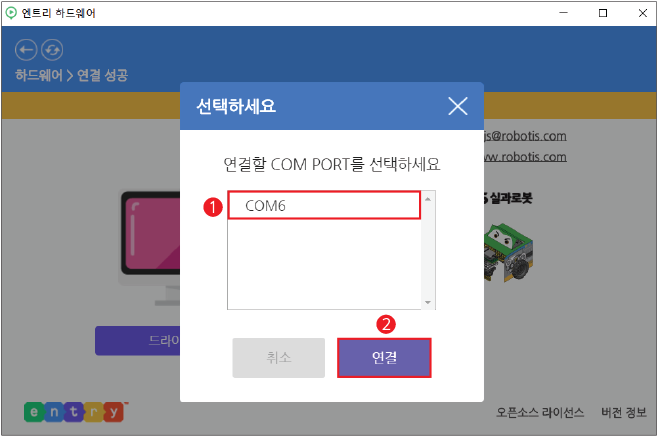
-
연결에 성공하면
최소화버튼을 눌러 창을 내립니다.
블루투스 동글(BT-410 DONGLE)의 드라이버는 PC와 연결 시 자동으로 다운로드됩니다.
참조 : 일부 컴퓨터에서 드라이버 문제로 연결 성공이 되지 않는 경우 위 화면의
드라이버 설치버튼을 눌러 PC에 드라이버를 수동으로 설치할 수 있습니다.
태스크로 작동하기
R+ m.Task 2 설치하기
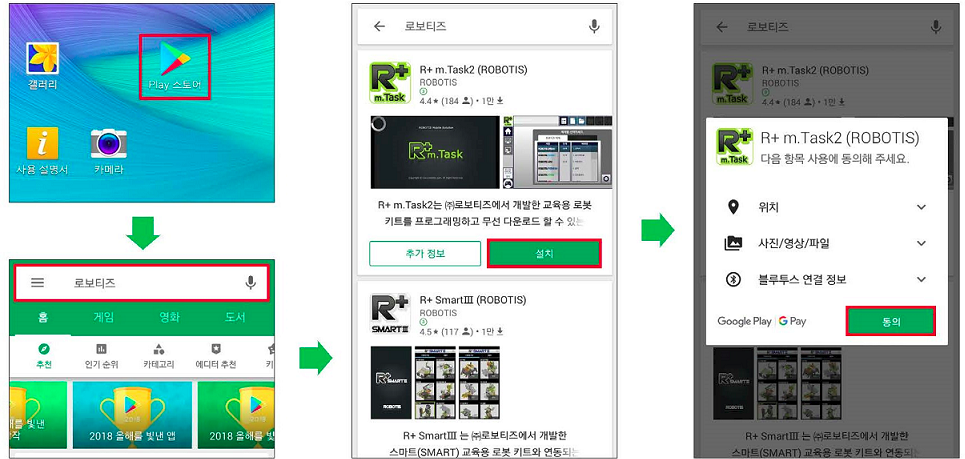
- 스마트 기기에서
구글 플레이 스토어를 실행한 후 검색창에 ‘로보티즈’를 입력합니다. - 검색된 목록에서
R+ m.Task2를 찾아 ‘설치’를 선택합니다. - 팝업창에서
동의버튼을 누르면 설치가 진행됩니다.
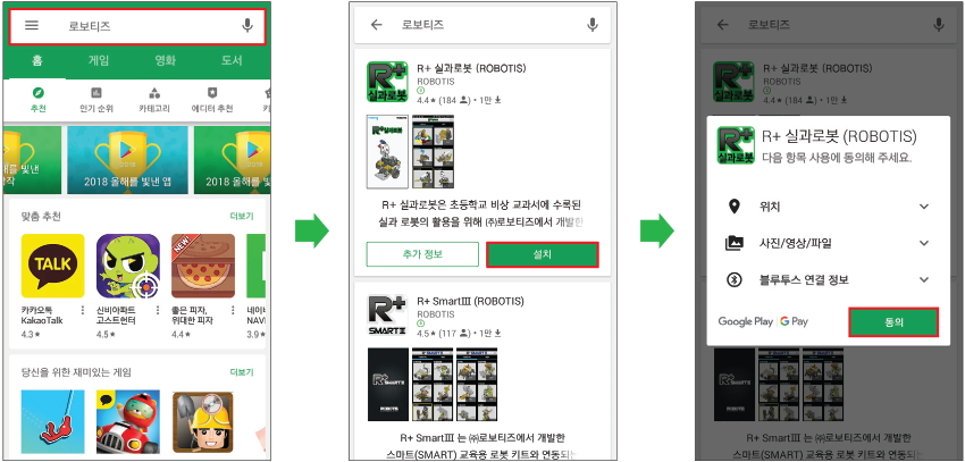
R+ 실과로봇 설치하기
- 구글 플레이 스토어 검색창에
로보티즈를 입력 후 검색합니다. - 목록에서
R+ 실과로봇을 찾은 후 설치합니다.
제어기와 스마트기기 연결
블루투스를 OpenCM7.0 제어기에 연결하기
- 제어기에 블루투스 모듈을 연결합니다.
- 시작 버튼을 눌러 제어기의 전원을 켭니다.
-
블루투스 모듈의 마지막 어드레스 2자리(예: 8F)를 확인합니다.
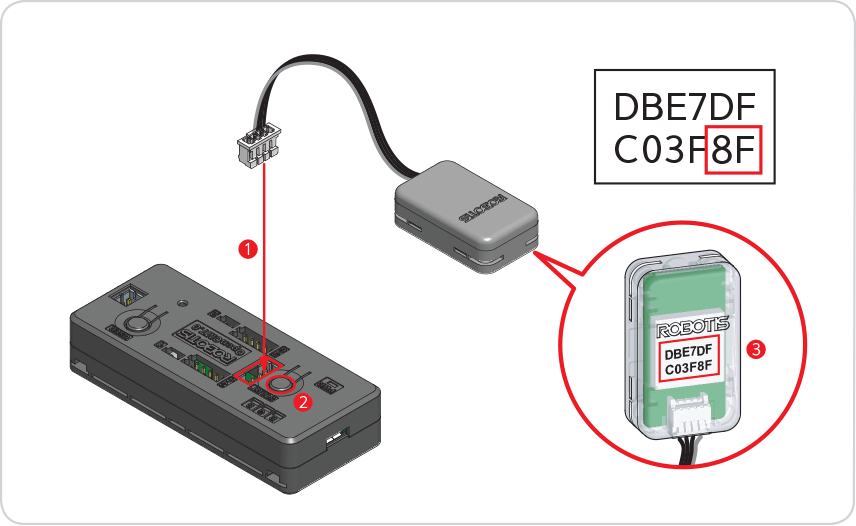
참고 : 블루투스 모듈의 어드레스는 제품마다 다릅니다.
- 스마트 기기에서 R+ 실과로봇 앱을 실행합니다..
- 화면에서
설정을 선택합니다. -
연결할 장치 선택을 누릅니다.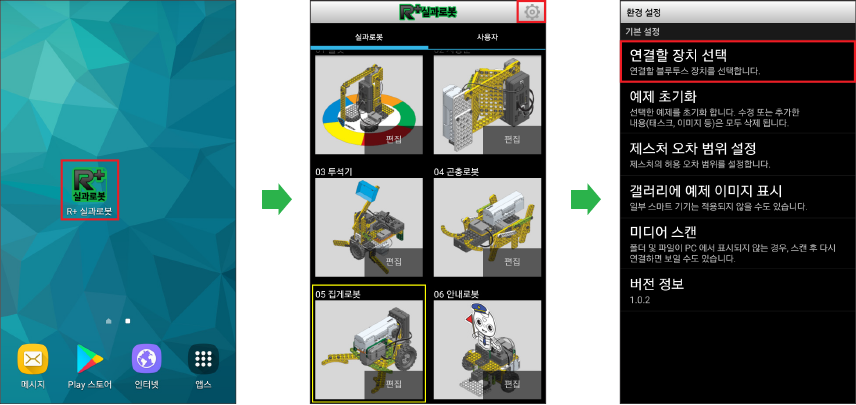
??칸에 블루투스 모듈의 마지막 어드레스 2자리를 입력합니다.- 제어기의 전원이 켜져 있는지 확인하고 검색 을 누릅니다.
- 검색된 목록의 마지막 어드레스 2자리가 동일한지 확인하고 선택하면 블루투스 통신 설정이 완료됩니다.
-
스마트기기의
뒤로 가기버튼을 눌러 앱의 메인 화면으로 돌아갑니다.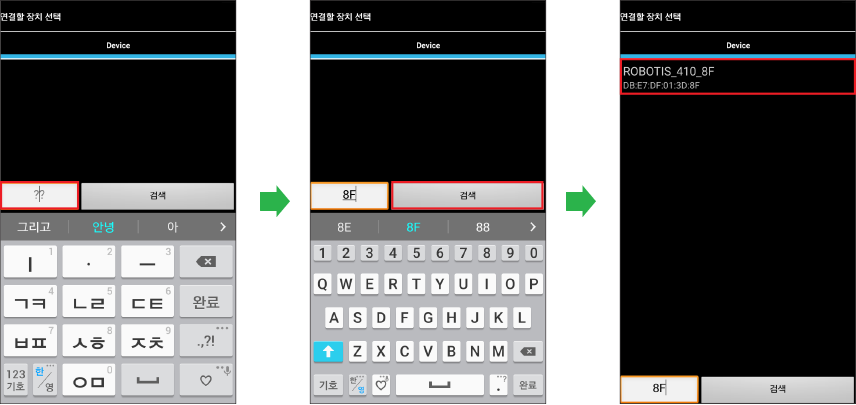
참고: PIN 번호는 로보티즈 고객지원센터를 통해서만 변경이 가능합니다.
최초 연결이 된 블루투스 모듈은,이후 자동으로 연결됩니다. 연결 설정 및 스마트 기기가 변경이 될 경우에만 통신 연결을 다시 진행 해주세요.
통합 프로그램 실행하기
- STEAMCUP 실과로봇 제어기에는 제품 출고 시 실과로봇용 통합 프로그램이 저장되어 있습니다.
- 로봇을 조립한 후 별도의 코딩 과정 없이 아래 방법으로 로봇을 작동 시킬 수 있습니다.
- 제어기 시작 버튼의 누름 횟수에 따라 아래와 같이 3가지 모드를 실행 시킬 수 있습니다.

| 눌림 횟수 | 로봇 | 설명 |
|---|---|---|
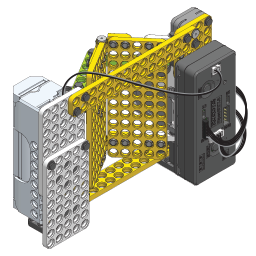
1 번 도 |
안내 로봇  |
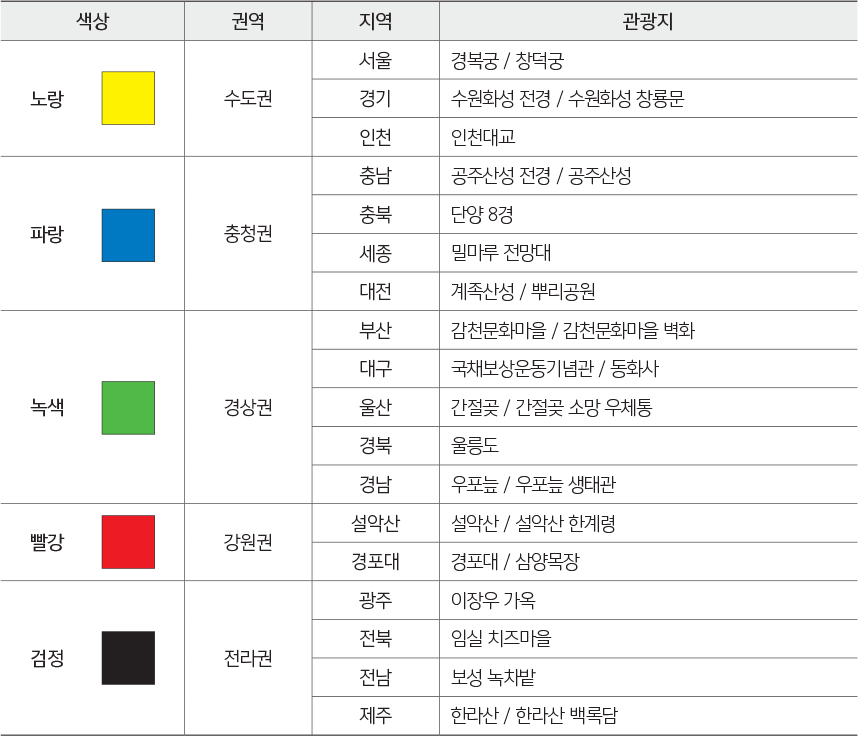
1번 누르면 도음계가 들리고 안내 로봇 모드를 준비합니다.실과 로봇앱을 실행한 후, 색상 카드를 인식하면 지역별 관광지를 안내합니다. 자세한동작 방법은 안내 로봇 실행하기(p22)를 확인해 주세요. |
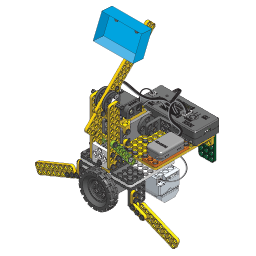
2 번 레 |
청소 로봇  |
2번 누르면 레음계가 들리고 청소 로봇 모드가 실행됩니다.박수를 한 번 치면 청소 로봇이 장애물을 피하면서 청소를 시작합니다. 두 번 치면 작동을 중지합니다. |
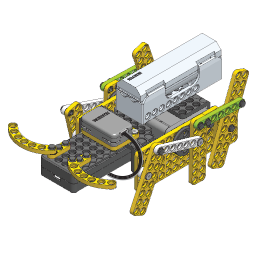
3 번 미 |
대기 모드  |
3번 누르면 미음계가 들리고 대기 모드가 됩니다.대기 모드에서는 아무 작동도 하지 않기 때문에, 프로그램을 다운로드 하거나 엔트리 프로그램을 연결할 때 사용합니다. |
안내로봇 실행하기
- 제어기의 전원을 켭니다. 사용 중 앱을 다시 실행하는 경우에도 제어기의 전원을 껐다 켜 주어야 로봇이 정상 작동합니다.
- 화면에서 ‘안내 로봇’을 선택합니다.
-
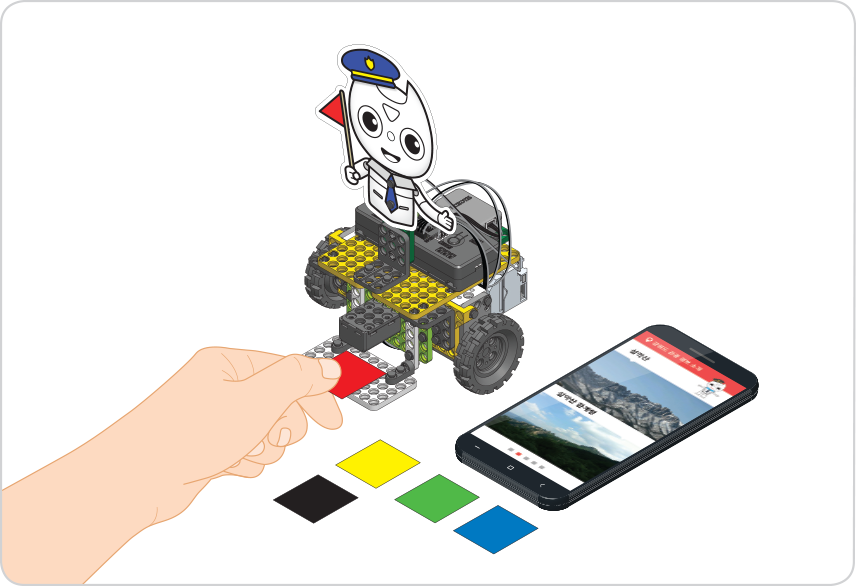
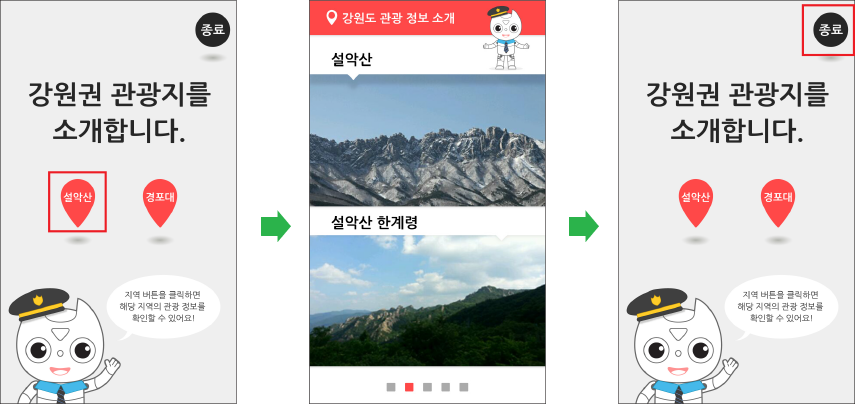
그림과 같이 ‘관광지 안내 로봇’ 프로그램이 실행됩니다.

-
안내 로봇의 컬러센서에 색상 카드를 약 2초간 인식시키면 색상에 따라 지역별 화면이 표시됩니다.
-
안내 받을 지역을 화면에서 선택하면 안내 로봇이 해당 지역 관광지를 소개합니다.
- 관광지 안내가 끝나면 ‘지역별 화면’으로 돌아가고 ‘종료’를 누르면 첫 화면이 나타나 색상 카드를 다시 인식시켜 다른 지역을 안내받을 수 있습니다.
제어기에 태스크파일 다운로드
- 로보티즈 프로그램(R+Task 2.0 or R+m.Task2) 으로 작성된 태스크파일(.tskx)을 제어기에 다운로드하는 방법입니다.
- 앱에 등록된 파일이나 R+m.Task2에서 새로 작성 또는 수정한 파일을 아래 방법(R+m.Task2)으로 제어기에 다운로드할 수 있습니다.
- 실과로봇 앱을 실행한 후 화면에서 안내 로봇의 편집 을 선택합니다.
- 화면 상단에 표시된 ‘R+ m.Task’를 선택합니다.
-
화면에 표시된 ‘실과로봇_통합코드’ 파일을 선택합니다.

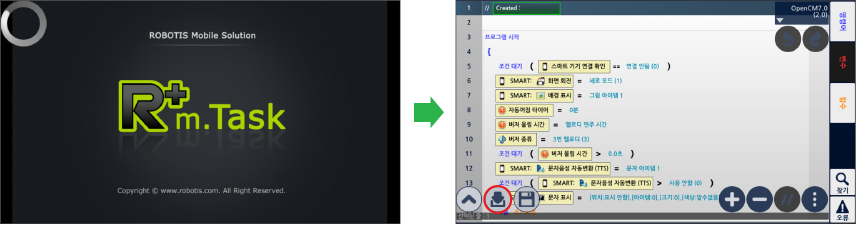
- R+ m.Task 프로그램이 실행되면 제어기의 전원이 켜져 있는지 확인합니다.
-
Task가 열리면 ‘다운로드’ 버튼을 선택합니다.
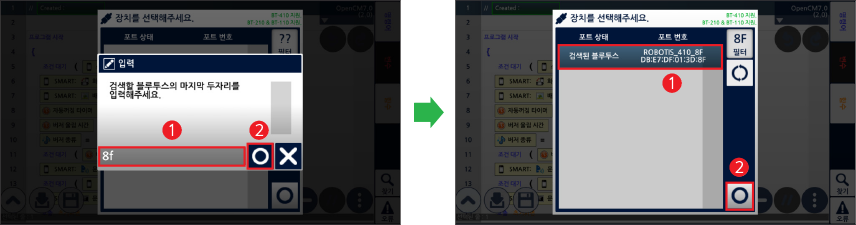
- 입력 창이 열리면 블루투스 모듈의 마지막 어드레스 2자리를 입력합니다.
-
검색된 장치를 목록에서 찾아 선택합니다.
-
화면에서 ‘다운로드’ 버튼을 다시 선택합니다.
-
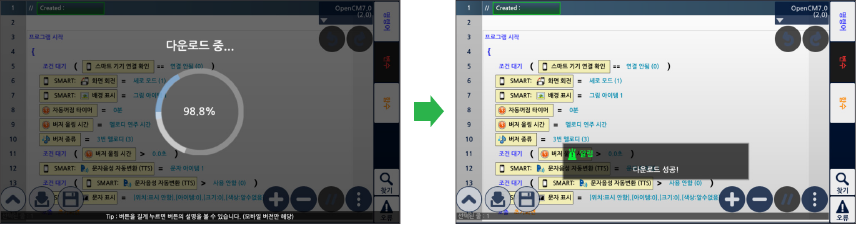
‘연결중…’이라는 메시지와 함께 장치를 찾습니다.

-
그림과 같이 다운로드가 진행된 후 완료되면 제어기의 전원이 꺼집니다.
실과로봇 앱 예제 초기화 방법
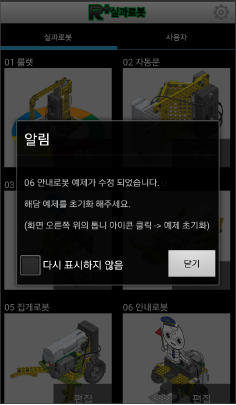
- STEAMCUP 실과로봇 앱의 예제 데이터를 처음 앱 설치 상태로 초기화 시키는 방법입니다.
- 앱 실행 시 아래와 같은 메시지가 나타나거나 사용 중 배경, 문자 등의 데이터 수정으로 인한 이상이 있을 때 예제 별 데이터를 처음 상태로 되돌려주는 기능입니다.
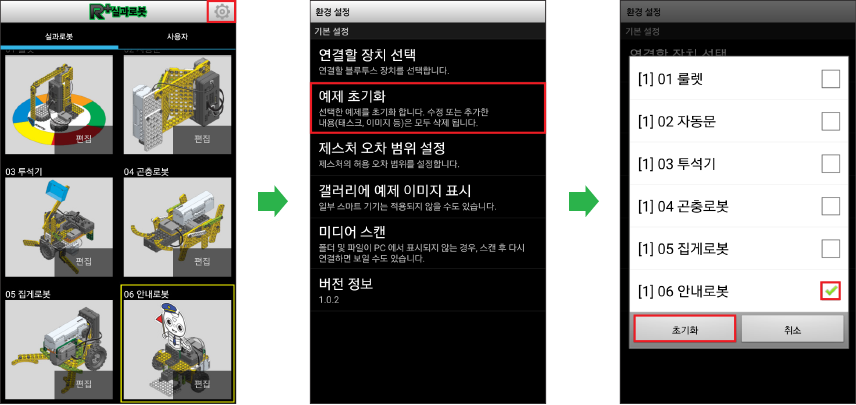
- 앱 우측 상단의 ‘설정’을 선택합니다.
- 메뉴에서 ‘예제 초기화’를 선택합니다.
교육자료 다운로드
참고 : 활동자료를 출력할 때는 실제크기(A4 원본크기)로 인쇄해야 합니다.
엔트리 예제
| 예제 이름 | 조립서 | 프로그램 자료 |
|---|---|---|
선풍기 (Fan) |
조립서 다운로드 | 교과형 기초 코딩 : 01_inforobot_Fan_Basic_kr 교과형 응용 코딩 : 02_inforobot_Fan_Advance_kr 활동자료 : inforobot_Fan_sourcebook |
다람쥐 (Squirrel) |
조립서 다운로드 | 교과형 기초 코딩 : 01_inforobot_Squirel_Basic_kr 교과형 응용 코딩 : 02_inforobot_Squirel_Advance_kr |
경찰 (Police Officer) |
조립서 다운로드 | 교과형 기초 코딩 : 01_inforobot_Police_Officer_Basic_kr 교과형 응용 코딩 : 02_inforobot_Police_Officer_Advance_kr |
스쿠터 (Scooter) |
조립서 다운로드 | 교과형 기초 코딩 : 01_inforobot_Scooter_Basic_kr 교과형 응용 코딩 : 02_inforobot_Scooter_Advance_kr |
분리수거로봇 (Recycling Robot) |
조립서 다운로드 | 교과형 기초 코딩 : 01_inforobot_Recycling_Robot_Basic_kr 교과형 응용 코딩 : 02_inforobot_Recycling_Robot_Advance_kr 활동자료 : inforobot_Recycling_Robot_sourcebook |
청소로봇 (Cleaning Robot) |
조립서 다운로드 | 교과형 기초 코딩 : 01_infoRobot_Cleaning_Robot_Basic_kr 교과형 응용 코딩 : 02_infoRobot_Cleaning_Robot_Advance_kr 활동자료 : infoRobot_Cleaning_Robot_sourcebook 실과 교과서 전용 청소로봇 코드 |