
프로그래밍
제어기 파라미터
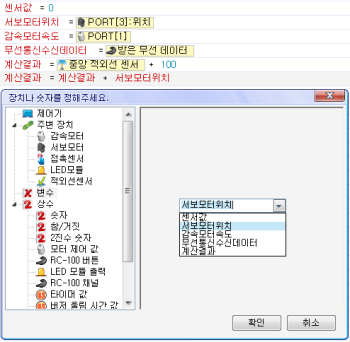
보낼 무선 데이터
제어기에서 무선 통신 모듈(적외선, 지그비 모듈)을 통해 외부로 데이터를 전송하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
- 보낼 데이터는 0 ~ 65535 사이의 숫자 값입니다.
- 보낼 무선 데이터 파라미터에 값을 설정하면 바로 무선으로 설정된 데이터를 전송합니다.
사용 예제
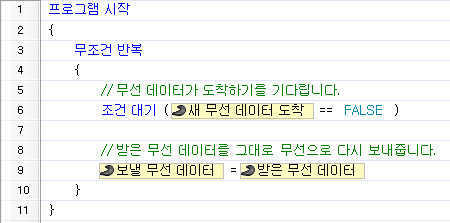
- 무선 데이터의 수신을 기다리다가 데이터가 도착하면 그 데이터를 그대로 다시 무선으로 보내주는 예제입니다.
사용 팁
-
일반적으로 ZIG2Serial 이 연결된 PC 의 제어용 프로그램에 응답을 보내기 위해 사용합니다.
받은 무선 데이터
무선 통신 모듈(적외선, 지그비 모듈)을 통해 데이터를 수신한 경우 수신한 데이터를 읽어가기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
- 데이터는 0 ~ 65535 사이의 숫자 값입니다.
- 확인하지 않은 새로운 받은 데이터가 들어 있는지 여부는 새 무선 데이터 도착을 이용하여 알 수 있습니다.
- 수신 버퍼를 통해 최대 2 개의 받은 무선 데이터 값을 저장할 수 있습니다.
- 2 개의 데이터가 수신 버퍼에 저장되어 있는 경우 읽기 동작을 수행하면 먼저 받은 데이터가 읽혀지고, 읽혀진 데이터는 수신 버퍼에서 지워집니다. 1 개의 데이터만 수신 버퍼에 남아 있는 경우 읽기 동작을 수행하면 가장 최근에 받았던 데이터를 얻게 됩니다.
사용 예제
-
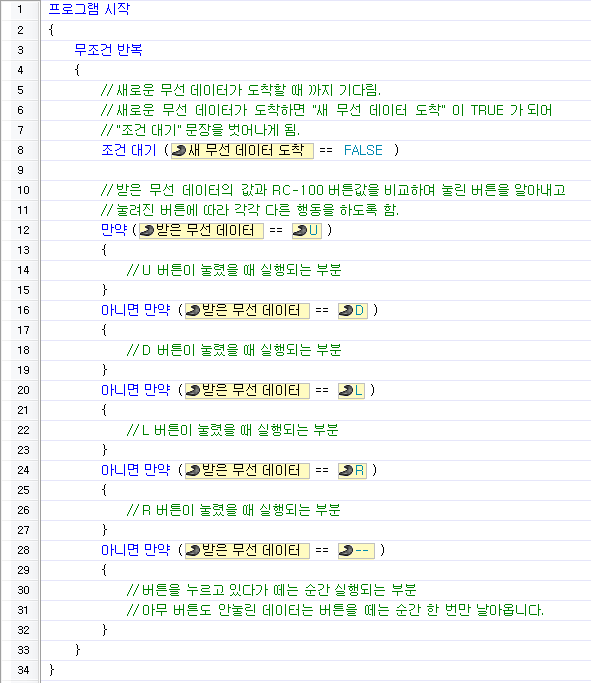
RC-100 을 사용하여 이동 방향을 조종하고자 할 경우 아래와 같이 사용할 수 있습니다.
새 무선 데이터
무선 통신 모듈(적외선, 지그비 모듈)을 통해 수신한 데이터 중 확인하지 않은 데이터가 남아 있는지 여부를 나타내는 파라미터 입니다.
사용 가능 제어기
파라미터 특성
- 참/거짓 상수를 사용합니다.
- 참 (TRUE, 숫자 1) : 확인하지 않은 새 무선 데이터가 수신 버퍼에 들어 있음을 나타냅니다.
- 거짓 ( FALSE, 숫자 0 ) : ‘받은 무선 데이터’ 파라미터를 사용하여 수신 버퍼의 모든 데이터를 확인하였음을 나타냅니다.
사용 예제
-
RC-100 을 이용하여 이동 방향을 조종하고자 할 경우
사용 팁
- 일반적으로 무선으로 데이터를 받아 처리하기 위해 데이터 수신 여부를 파악하는데 주로 사용합니다.
임의의 숫자
0 ~ 최대값 (최대값은 사용자가 0 ~ 255 사이의 값으로 설정할 수 있음) 사이의 임의의 숫자를 생성합니다.
사용 가능 제어기
파라미터 특성
- 0 ~ 최대값 사이의 임의의 숫자를 생성합니다.
- 최대값은 기본으로 255로 설정되어 있습니다.
- 최대 값은 사용자가 0~255사이의 값으로 변경할 수 있습니다.
- 무작위 한 행동 (예하면 게임을 만들 때)을 만들 때 유용하게 사용할 수 있습니다.
사용 예제
- 0 ~ 9사이의 임의의 숫자를 생성하고 그 숫자가 0 ~ 6 사이이면 1번 모션을 실행하고 7 ~ 9 이면 2번 모션을 실행합니다.
-
결과적으로 70%의 확률로 1번 모션을 실행하게 되고 30%의 확률로 2번 모션을 실행하게 됩니다.
Aux LED
제어기의 Aux LED 상태를 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
- 참/거짓 상수를 사용합니다.
- 참 (TRUE, 숫자 1) : 확인하지 않은 새 무선 데이터가 수신 버퍼에 들어 있음을 나타냅니다.
- 거짓 ( FALSE, 숫자 0 ) : ‘받은 무선 데이터’ 파라미터를 사용하여 수신 버퍼의 모든 데이터를 확인하였음을 나타냅니다.
사용 예제
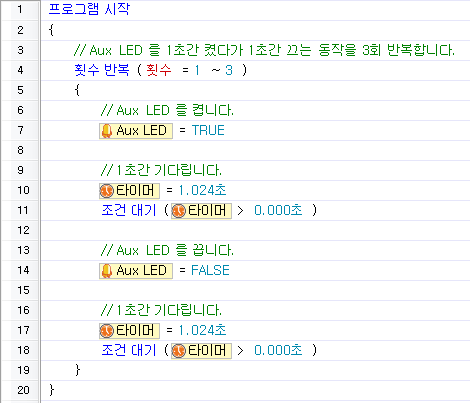
Aux LED 를 1초간 켰다가 1초간 끄는 동작을 3회 반복하는 예제입니다.
버튼
제어기의 버튼 상태를 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
CM-5, CM-510, CM-530 인 경우
- 버튼 값은 숫자로 읽혀지며, 각 버튼의 코드 값은 아래와 같습니다. R 버튼 : 1 , L 버튼 : 2 , D 버튼 : 4 , U 버튼 : 8 , START 버튼 : 16눌린 버튼이 여러 개일 경우 각 버튼의 코드값이 합산되어 읽혀집니다.
- 버튼 상수를 사용하면 버튼 값 비교 시 각 버튼의 코드값을 몰라도 쉽게 확인이 가능합니다.
OpenCM9.04 인 경우
- 참/거짓 상수를 사용합니다.
- 사용자 버튼이 눌린 경우는 참(1), 버튼이 눌리지 않은 경우는 거짓(0) 입니다.
사용 예제
CM-5, CM-510, CM-530 인 경우
-
제어기의 U / D / L / R 버튼이 각각 눌렸을 때 동작을 다르게 하는 예제입니다.

OpenCM9.04 인 경우
-
제어기의 사용자 버튼이 각각 눌렸을 때 동작을 다르게 하는 예제입니다.
타이머
제어기 내부에 자동으로 카운트 다운 되는 타이머의 값을 설정하거나 현재 타이머 값을 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
타이머 값 상수를 사용하여 타이머 값을 설정할 수 있습니다.
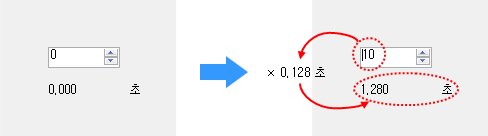
10진수의 값을 입력하면 자동으로 타이머 시간 값으로 변환되어 표시됩니다.
실제 타이머의 값은 0 ~ 255 사이의 숫자를 사용합니다. 타이머 값 1 은 0.128초를 나타냅니다. 타이머 파라미터에 0 보다 큰 값을 설정하면, 설정된 순간부터 0.128초 마다 1 씩 카운트 다운을 시작합니다.
사용 예제
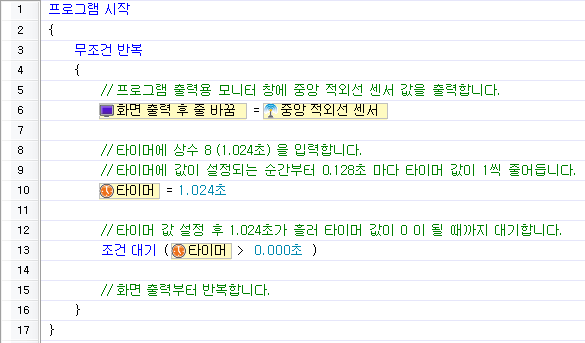
1초에 한 번씩 중앙 적외선 센서 값을 화면에 출력하는 예제입니다.
정밀타이머
제어기 내부에 자동으로 카운트 다운 되는 정밀타이머의 값을 설정하거나 현재 정밀타이머 값을 읽어오기 위해 사용하는 파라미터입니다.
‘타이머’와 달리 최소단위가 0.001초이므로 정밀한 시간제어를 필요로 하는 경우에 유용합니다.
사용 가능 제어기
파라미터 특성
타이머 값 상수를 사용하여 타이머 값을 설정할 수 있습니다.
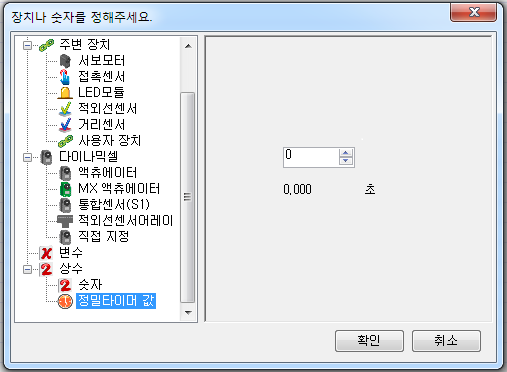
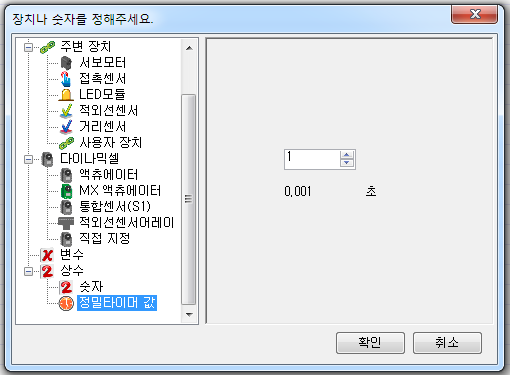
10진수의 값을 입력하면 자동으로 정밀타이머 시간 값으로 변환되어 표시됩니다. 실제 타이머의 값은 0 ~ 65535 사이의 숫자를 사용합니다. 타이머 값 1 은 0.001초를 나타냅니다. 타이머 파라미터에 0 보다 큰 값을 설정하면, 설정된 순간부터 0.001초 마다 1 씩 카운트 다운을 시작합니다.
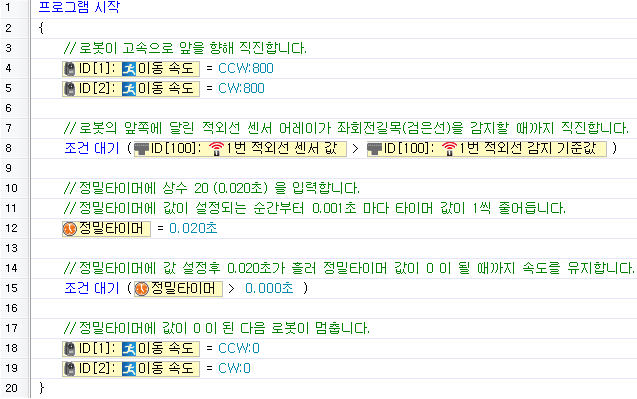
사용 예제
고속직진 하다가 길목 (검은 선)을 감지하면 짧은 시간 더 직진하여 두 바퀴가 길목에 놓이도록 한 후 멈추는 예제입니다.
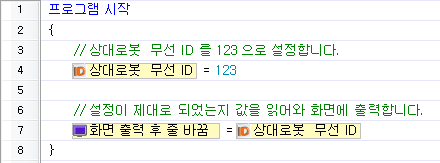
상대 로봇 무선ID
로봇에 장착된 지그비 통신 모듈과 무선으로 통신할 상대편 지그비 통신 모듈의 ID 값을 설정하거나, 설정된 상대편 지그비 통신 모듈의 ID 값을 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
무선 ID 값은 0 ~ 65535 사이의 숫자 값을 사용합니다. 상대로봇 무선 ID 값을 65535(16진수 0xFFFF)로 설정하면 무선 ID 에 상관없이 모든 지그비 모듈이 수신할 수 있도록 데이터를 전송합니다. (브로드 캐스팅 모드)
사용 예제
상대로봇 무선 ID 를 ‘123’ 으로 설정하고, 확인을 위해 값을 읽어와서 화면에 출력하는 예제입니다.
사용 팁
지그비 통신이 원활히 이루어 지려면 통신을 연결하려는 상대편 지그비의 정확한 ID 값을 넣어주어야 합니다. 브로드 캐스팅 모드를 잘못 사용할 경우 여러 가지 문제를 일으킬 수 있습니다.
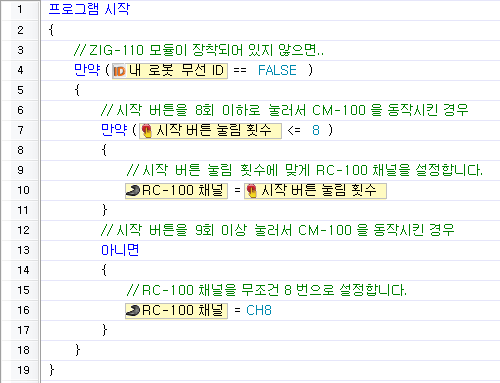
내 로봇 무선ID
- CM-100A : ZIG-110 모듈 장착 여부를 판단하기 위해 사용하는 파라미터입니다.
- 그 외 제어기 : 로봇에 장착된 지그비 통신 모듈의 ID 값을 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
- CM-100A : ZIG-110 무선 통신 모듈이 장착되어 있는 경우 참(TRUE, 숫자 1), 장착되지 않은 경우 거짓(FALSE, 숫자 0)의 값을 가집니다.
- 그 외 제어기 : 지그비 통신 모듈이 장착되어 있는 경우 0 ~ 65534 사이의 숫자로 된 ID 값이 읽혀집니다. 장착되지 않은 경우 65535(16진수로 0xFFFF)의 값이 읽혀집니다.
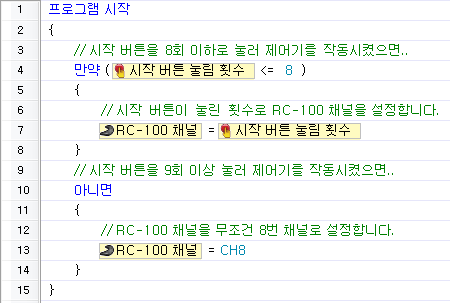
사용 예제
CM-100A 제어기에 ZIG-110 모듈 장착 여부를 체크하여 장착되지 않은 경우 RC-100 채널을 시작 버튼 눌림 횟수에 맞춰 설정하는 예제입니다.
CM-100A 을 제외한 그 외 제어기에 장착된 지그비 모듈의 ID 를 화면에 출력하는 예제입니다.
화면출력/줄바꿈
태스크 코드에 화면 출력 파라미터를 사용하면 원하는 값을 볼 수 있습니다.
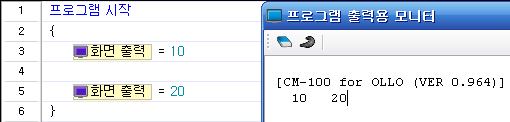
화면 출력 : 값을 출력하고 커서를 옆으로 한 칸 이동시킵니다.
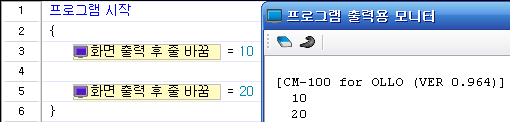
화면 출력 후 줄바꿈 : 값을 출력하고 커서를 다음 줄로 이동시킵니다.
화면 출력 내용
- 제어기 자체 출력 내용
-
프로그램 시작 메시지가 처음에 출력됩니다.
-
프로그램 수행 중 에러 메시지 (에러 메시지 종류 보기)
-
- 태스크 코드 출력 내용 : -32767 ~ +32767 범위의 10진수로 표시됩니다. (글자는 출력할 수 없습니다.)
-
숫자를 출력하는 경우
-
센서 값을 출력하는 경우
-
화면 지우기
화면의 내용을 지울 수 있습니다.
왼쪽/중앙/오른쪽 적외선 센서
제어기의 적외선 센서 값을 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
- 적외선 센서 값은 0 ~ 1023 사이의 값을 갖습니다.
- 같은 색의 물체라면 거리가 가까울 수록 1023 에 가까운 값(큰 값)을 가지며, 거리가 멀 수록 0 에 가까운 값(작은 값)을 가집니다.
- 같은 거리의 물체라면 밝은 색(흰 색)에 가까울 수록 1023 에 가까운 값(큰 값)을 가지며, 어두운 색(검은색)에 가까울 수록 0 에 가까운 값(작은 값)을 가집니다.
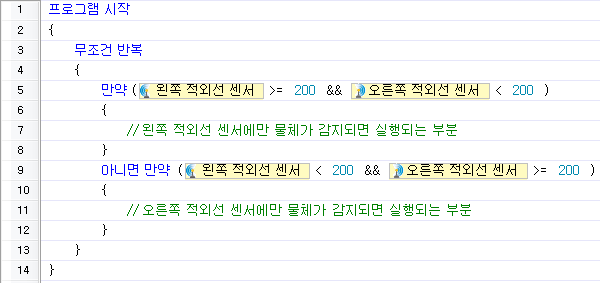
사용 예제
왼쪽 적외선 센서에만 물체가 감지될 경우와 오른쪽 적외선 센서에만 물체가 감지될 경우에 특정 행동을 하도록 하는 예제
사용 팁
- 햇빛이나 형광등과 같은 적외선을 발산하는 외부 조명에 의해 센서 값이 변화할 수 있습니다.
- 물체의 색상에 따라, 주변 조명의 상태에 따라 적외선 센서 값은 차이가 있을 수 있으므로 물체와의 정확한 거리를 측정하기 위해 적외선 센서를 사용하는 것은 적합하지 않습니다.
- 위에서와 같이 같은 거리의 물체라도 색상에 따라 적외선 센서 값이 달라지는 특성을 이용하여 흰 색과 검은 색을 구분하는 용도로 적외선 센서를 사용할 수 있습니다. (라인트레이서에 활용)
부저 종류
제어기에 내장된 부저를 통해 연주할 음계, 또는 멜로디 번호를 지정하거나 현재 연주 중인 음계, 또는 멜로디 번호를 얻어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
- ‘부저 울림 시간’과 반드시 함께 사용되어야 하며, ‘부저 울림 시간’을 먼저 설정하고 난 후 ‘부저 종류’를 설정해야 설정에 맞게 소리가 납니다. (순서 중요) ‘부저 울림시간‘에서 대한 자세한 정보를 참고하세요.
-
‘부저 울림 시간’ 설정 값에 따라 멜로디 상수나 음계 값 상수를 사용하여 ‘부저 종류’를 설정할 수 있습니다.
-
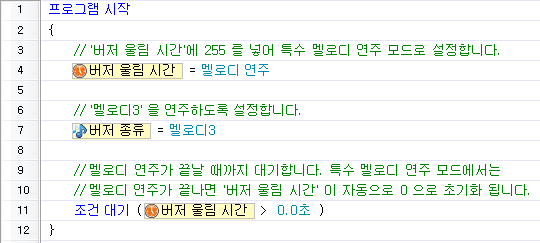
‘부저 울림 시간’ 값이 255 인 경우 : 특수 멜로디 연주 모드
‘부저 종류’에 멜로디 상수를 사용하여 0 ~ 15 번 사이의 16가지 멜로디 중 하나를 선택하여 연주합니다.
-
‘부저 울림 시간’ 값이 0 ~ 254 사이의 값인 경우 : 음계 연주 모드
‘부저 종류’에 음계 값 상수를 사용하여 0 ~ 26 사이의 음계 값을 넣어 하나의 음계를 ‘부저 울림 시간’에 설정된 시간만큼 연주합니다.
-
사용 예제
-
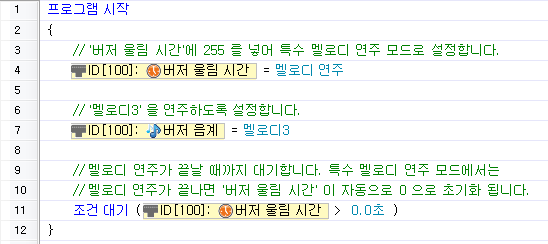
멜로디3 을 연주하는 예제입니다.
-
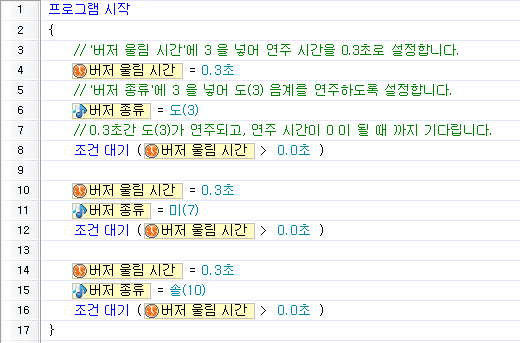
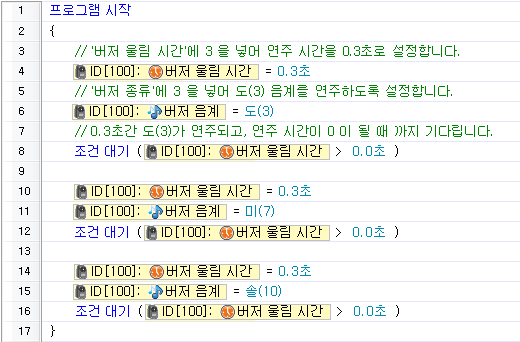
0.3초씩 “도미솔”을 연주하는 예제입니다
부저 울림시간
제어기에 내장된 부저를 통해 연주할 음계 또는 멜로디의 연주 시간을 설정하거나 현재 남은 연주 시간을 얻어 오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
- ‘부저 종류’와 반드시 함께 사용되어야 하며, ‘부저 울림 시간’을 먼저 설정하고 난 후 ‘부저 종류’를 설정해야 설정에 맞게 소리가 납니다. (순서 중요) (‘부저 종류‘에서 자세한 정보를 참고하세요.)
- 부저 울림 시간 값 상수를 사용하여 ‘부저 울림 시간’을 설정할 수 있습니다.
- 실제 ‘부저 울림 시간’ 값은 0 ~ 255 사이의 숫자를 사용합니다.
-
숫자 1 은 연주 시간 0.1 초를 의미하며 최소 부저 울림 시간은 0.1초, 최대 부저 울림 시간은 5초입니다. 따라서 50 ~ 254 사이의 값을 입력하면 부저는 최대 울림 시간인 5초간 울리게 됩니다.
-
‘부저 울림 시간’ 값이 255 인 경우 : 특수 멜로디 연주 모드
‘부저 종류’에 멜로디 상수를 사용하여 0 ~ 15 번 사이의 16가지 멜로디 중 하나를 선택하여 연주합니다. 멜로디의 연주가 끝나면 자동으로 ‘부저 울림 시간’값이 0 으로 초기화 됩니다. -
‘부저 울림 시간’ 값이 0 ~ 254 사이의 값인 경우 : 음계 연주 모드
‘부저 종류’에 음계 값 상수를 사용하여 0 ~ 26 사이의 음계 값을 넣어 하나의 음계를 ‘부저 울림 시간’에 설정된 시간만큼 연주합니다.
-
사용 예제
-
멜로디3 을 연주하는 예제입니다. (‘부저 종류’ 예제와 동일)
-
0.3초씩 “도미솔”을 연주하는 예제입니다. (‘부저 종류’ 예제와 동일)
사용 팁
- 부저 연주 중에는 연주 시간을 다시 설정할 수 없습니다.
최종 소리감지 횟수
마이크가 내장된 제어기에는 일정 수준 이상의 큰 소리가 날 경우 1회씩 카운트 해 주는 기능이 있습니다. 대표적인 예로 박수 소리의 횟수를 카운트 하는 것이 가능합니다. 이 때 감지된 소리의 횟수 값을 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
- ‘최종 소리감지 횟수’는 0 ~ 255 사이의 숫자를 사용합니다. 따라서 최대 소리감지 횟수도 255 회가 됩니다.
- 연속적인 소리의 입력이 멈추어야 ‘최종 소리감지 횟수’ 파라미터에 현재까지 감지된 소리의 횟수 값이 입력됩니다.
- 소리감지 횟수는 자동으로 초기화 되지 않기 때문에 소리감지를 시작하기 전에 사용자가 직접 0 으로 초기화 해주어야 합니다.
#### 사용 예제
-
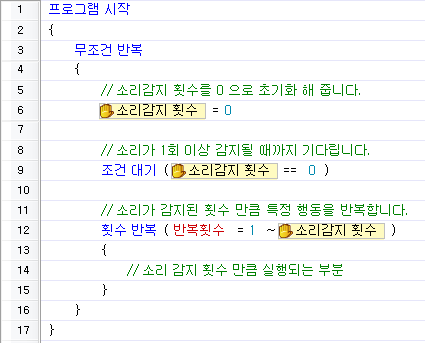
소리를 감지하고, 감지한 횟수 만큼 특정 행동을 반복하는 예제입니다.
#### 사용 팁
- 제어기와 연결된 감속 모터 등이 움직이는 소리는 아주 큰 소리로 입력되기 때문에 감지 횟수가 정상적으로 입력되지 않을 수 있습니다. 따라서 올로의 움직임이 완전히 멈춘 상태에서만 소리감지를 사용하는 것이 좋습니다.
실시간 소리감지 횟수
마이크가 내장된 제어기에서 일정 수준 이상의 큰 소리가 날 경우 1회씩 카운트 해 주는 기능이 있습니다. 대표적인 예로 박수 소리의 횟수를 카운트 하는 것이 가능합니다. 이 때 실시간으로 현재까지 카운트 된 감지 횟수 값을 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
- ‘실시간 소리감지 횟수’는 0 ~ 255 사이의 숫자를 사용합니다. 따라서 최대 소리감지 횟수도 255 회가 됩니다.
- 소리가 감지될 때 마다 실시간으로 파라미터 값이 증가합니다.
- 0.8 초간 더 이상 소리가 입력되지 않으면 ‘실시간 소리감지 횟수’ 값을 ‘최종 소리감지 횟수’ 파라미터로 넘겨주고 ‘실시간 소리감지 횟수’ 값은 자동으로 0 으로 초기화 됩니다.
사용 예제
-
실시간 소리 감지 횟수를 ‘감지횟수’변수에 저장하는 예제입니다.

-
실시간 소리 감지 횟수가 0인 동안 대기하도록 하는 예제입니다.

-
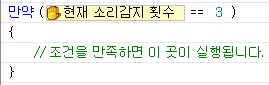
실시간 소리 감지 횟수가 3인 경우 특정 구간을 실행하도록 하는 예제입니다.
사용 팁
- 제어기와 연결된 감속 모터 등이 움직이는 소리는 아주 큰 소리로 입력되기 때문에 감지 횟수가 정상적으로 입력되지 않을 수 있습니다. 따라서 올로의 움직임이 완전히 멈춘 상태에서만 소리감지를 사용하는 것이 좋습니다.
시작버튼 눌림횟수
최초 제어기를 켤 때 연속으로 시작 버튼을 누른 횟수를 얻어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
- ‘시작 버튼 눌림 횟수’는 0 ~ 255 사이의 숫자를 사용합니다. 따라서 시작 버튼 눌림 최대 카운트 횟수는 255 회가 됩니다.
사용 예제
-
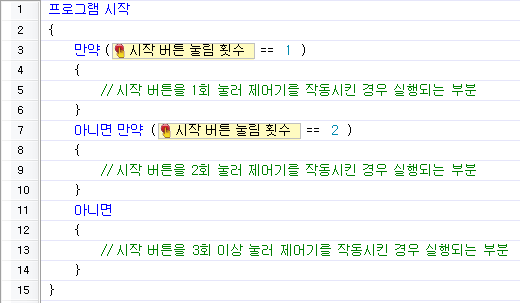
시작 버튼을 누른 횟수에 따라 1회, 2회, 3회 이상으로 나누어 다른 동작을 실행하는 예제
자동꺼짐 타이머
제어기의 절전 모드로, 설정된 시간만큼의 시간이 지나면 자동으로 꺼지도록 타이머를 설정할 수 있습니다. 자동 꺼짐 타이머의 시간을 설정하거나 남은 시간을 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
-
자동꺼짐 시간 상수를 사용하여 ‘자동꺼짐 타이머’의 시간을 설정할 수 있습니다.

- ‘자동꺼짐 타이머’의 실제 값은 0 ~ 255 사이의 숫자를 사용합니다.
- 숫자 1 은 시간 값 1분을 의미합니다.
- 제어기 작동 시 ‘자동꺼짐 타이머’의 기본 설정 값은 5분 입니다.
- 자동꺼짐 타이머 값을 0분으로 설정하면 자동꺼짐 기능이 동작하지 않습니다.
- 자동꺼짐 타이머의 남은 시간은 항상 ‘분’ 단위로 읽혀집니다. 즉, 50초가 남아 있어도 1분으로 읽혀집니다.
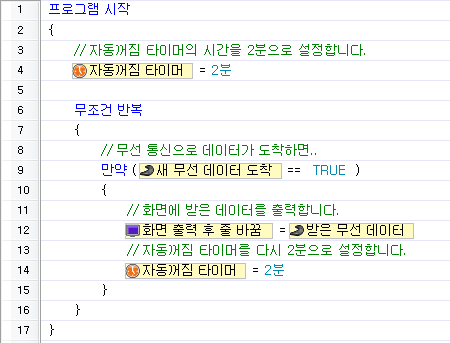
사용 예제
-
2분 이내에 무선 통신으로 데이터가 들어오지 않으면 자동으로 꺼지고, 무선 통신으로 데이터가 들어오면 다시 2분간 기다리는 예제입니다.
사용 팁
- 특정 동작이 일어나면 꺼지지 않도록 하기 위해서는 수동으로 자동꺼짐 타이머 값을 다시 설정해 주어야 합니다.
RC-100 채널
제어기에 연결된 적외선 수신기와 RC-100 사이의 적외선 통신 채널을 설정하거나 현재 채널을 확인하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
파라미터 특성
-
RC-100 채널 상수를 사용하여 채널 값을 설정합니다.
- 실제 ‘RC-100 채널’ 값은 0 ~ 8 사이의 숫자를 사용합니다.
- 채널 0 번은 모든 채널과 통신하는 특수한 채널입니다.
사용 예제
-
시작 버튼이 눌린 횟수에 따라 RC-100 채널을 설정하는 예제입니다.
사용 팁
- RC-100 (무선 조종기) 의 채널 설정 방법을 참고하여 채널을 설정하고, 동일한 채널을 제어기에 연결된 적외선 수신기에 설정해 주어야 적외선 무선 통신이 원활히 이루어 집니다
모션 파라미터
모션 페이지
모션을 실행시키는 파라미터입니다.
사용 가능 제어기
파라미터 특성
- 모션 페이지 번호를 쓰면 해당 모션이 실행됩니다.
- 모션 페이지를 읽으면 현재 실행 중인 페이지 번호를 알 수 있습니다.
- 특정 페이지 번호를 사용하면 실행 중인 모션을 정지시킬 수 있습니다.
- 정지 명령이 실행되면 페이지 반복 횟수는 무시됩니다.
- 모션이 완전히 정지되었음을 알기 위해서는 모션 상태를 확인해야 합니다.
- 페이지 번호를 0으로 입력하면 마무리(Exit) 페이지까지 실행하고 멈춥니다.
- 페이지 번호를 -1으로 입력하면 현재 페이지까지만 실행하고 멈춥니다.
- 해당 페이지에 모션이 없으면 에러가 발생합니다. (에러 메시지 보기)
- 1 ~ 255번까지의 페이지 번호를 사용합니다.(일부 제어기의 경우 1 ~ 127번까지만 사용됩니다.)
사용 예제
-
모션 호출 번호 3번을 실행합니다.

모션 상태
모션 실행 상태를 알 수 있는 파라미터입니다.
사용 가능 제어기
파라미터 특성
- 모션이 실행 중이면 1이고, 실행 중이지 않으면 0을 반환합니다.
- 참/거짓 상수를 사용할 수 있습니다.
- 참: 모션 실행 중
- 거짓: 모션 실행 중이 아님
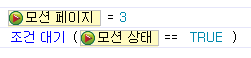
사용 예제
-
모션 페이지 3번을 실행하고 완료 될때까지 기다립니다.
관절 오프셋
모션 실행시 관절별로 영향을 줄 수 있는 파라미터입니다.
주의: 관절 오프셋이 로봇에 적용되기 위해서는 관절 오프셋 값 설정 후 모션이 실행되어야 합니다. {: .notice–warning}
사용 가능 제어기
파라미터 특성
- -255 ~ 255 : 값이 설정된 관절의 위치 값에 오프셋이 적용됩니다. 예) 모션 데이터의 관절 ID 3 의 위치 값이 300 → 400 → 500 으로 설정된 경우, ID 3 의 관절 오프셋이 -100 이라면 모션이 실행될 때 ID 3 에 해당하는 관절의 값은 200 → 300 → 400 으로 변경되어 동작합니다.
- 1024 : 관절 오프셋 값에 1024 를 입력하면 해당 관절은 모션 실행 시 모션 데이터 값에 영향을 받지 않습니다. 예) 그리퍼와 같이 모션이 아닌 직접 위치 제어를 하려는 경우 모션이 실행되어도 움직이지 않도록 하기 위해 사용할 수 있습니다.
사용 예제
-
특정 관절에 오프셋 값 적용
모션 페이지 3번 실행시에 ID 4번 관절에 -100만큼 오프셋을 주고, 모션이 완료 될때까지 기다립니다.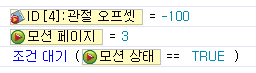
-
특정 관절을 모션 실행 시 모션 데이터 값의 영향을 받지 않도록 함
ID 4번 관절을 모션 실행시 모션 데이터의 영향을 받지 않도록 설정합니다.
관절 LED 자동켜기
모션을 실행하는 도중에 XL-320의 LED가 깜박이는 기능을 사용 할 지를 결정합니다.
사용 가능 제어기
파라미터 특성
- 참/거짓 상수를 사용합니다.
- 참 이면 모션을 실행하는 도중에 XL-320의 목표 위치 값에 따라 RGB LED가 부동한 색상으로 깜박입니다.
- 거짓 이면 모션을 실행하는 도중에 XL-320의 RGB LED가 목표 위치 값에 따라 깜박이지 않습니다.(단, 과부하인 경우 XL-320의 빨간색 LED가 깜박일 수 있습니다.)
사용 예제
- 1번 모션을 실행할 때 관절 LED가 깜박입니다.
-
2번 모션을 실행할 때 관절 LED가 깜박이지 않습니다.
주변장치
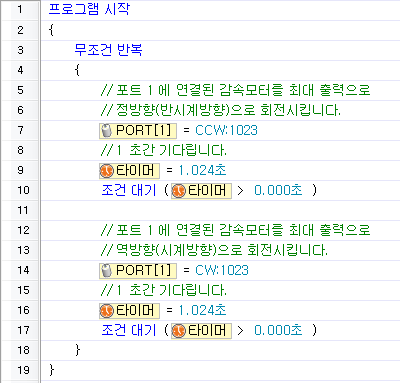
감속모터
감속모터의 회전 방향과 출력(속도)을 제어하기 위해 사용하는 파라미터입니다.
([감속 모터 부품] 설명을 보시려면 여기를 참고하세요.)
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 모터 제어 값 상수를 사용하여 감속모터 제어 값을 입력할 수 있습니다.
- 감속 모터의 회전 방향과 출력을 같이 입력합니다.

- CW (Clock Wise) : 시계 방향 (역방향)
- CCW (Counter Clock Wise) : 반시계 방향 (정방향)
- CCW:0 ~ CCW:1023 : 10진수로 0 ~ 1023
-
CW:0 ~ CW:1023 : 10진수로 1024 ~ 2047 - 실제 제어 값은 0 ~ 2047 사이의 숫자를 사용합니다.
사용 예제
-
포트 1 에 연결된 감속모터를 정방향 최대 출력으로 1초간 회전시키고, 다시 역방향 최대출력으로 1초간 회전시키는 것을 반복하는 예제입니다.
사용 팁
- 제어기에 연결한 포트 번호를 정확히 확인하고 사용하세요.
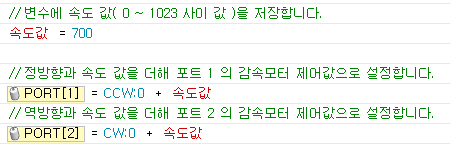
- 속도 값과 방향을 각각 따로 제어하려면 10진수로 된 실제 모터 제어 값을 참고하여 아래와 같이 사용할 수 있습니다.
-
아래와 같이 설정하면 포트 1 의 감속모터는 CCW:700 으로 설정되고, 포트 2 의 감속모터는 CW:700 으로 설정됩니다.
서보모터
서보모터의 동작을 설정하기 위해 사용하는 파라미터입니다. 서보모터 파라미터에는 3가지(동작 모드, 속도, 위치)의 서브 파라미터들이 있어서 서보모터의 동작을 좀 더 세부적으로 설정할 수 있도록 해 줍니다.
(서보모터 부품 설명을 보시려면 여기를 참고하세요.)
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 동작 모드 설정을 위해 참/거짓 상수를 사용할 수 있습니다.
- 참 (TRUE, 숫자 1) : 관절 모드로 동작합니다. 관절 모드에서는 속도 파라미터로 출력을 설정할 수 있으며, 위치 파라미터로 원하는 위치로 이동할 수 있습니다.
-
거짓 ( FALSE, 숫자 0 ) : 회전 모드로 동작합니다. 회전 모드에서는 속도 파라미터만 사용하여 감속모터와 동일하게 동작할 수 있습니다. 위치 파라미터는 무시됩니다.
-
속도(출력) 제어를 위해 모터 제어값 상수를 사용할 수 있습니다.
- CW (Clock Wise) : 시계 방향 (역방향)
- CCW (Counter Clock Wise) : 반시계 방향 (정방향)
- CCW:0 ~ CCW:1023 : 10진수로 0 ~ 1023
- CW:0 ~ CW:1023 : 10진수로 1024 ~ 2047
-
관절 모드에서 위치 제어를 위해 위치값 상수를 사용할 수 있습니다.
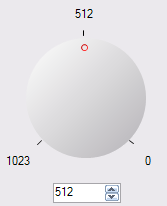
- 0 ~ 1023 사이의 10진수를 사용합니다.빨간 원의 위치가 10진수 값의 실제 위치입니다.
- 빨간 원을 조그 다이얼 식으로 마우스 드래그로 돌려서 값을 설정할 수 있습니다.
- 실제 최대 제어 각은 300도 입니다. 따라서 최소 제어각, 즉 위치값 1 의 단위는 약 0.29도 (300도 / 1024 = 0.29도) 입니다.
- 제어각에 대한 보다 자세한 정보는 서보모터 부품 설명 페이지를 참고하세요.
사용 예제
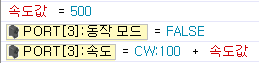
-
포트 3의 서보모터를 회전 모드로 설정한 후, 시계 방향으로 600의 출력으로 회전시키는 예제입니다.
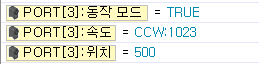
-
포트 3의 서보모터를 관절 모드로 설정한 후, 최대 출력으로 500의 위치로 이동시키는 예제입니다.
사용 팁
- 제어기에 서보모터가 연결된 포트 번호를 정확히 확인하고 사용하세요.
- 서보모터와 포트 호환이 되는 다른 모듈(LED 모듈, 적외선 센서 모듈 등)을 연결한 포트를 서보모터 제어 방식으로 제어하는 프로그램을 실행할 경우 모듈이 손상될 수 있으니 주의하세요.
- 다이나믹셀에 비해 정밀도가 떨어지고, 출력(토크)이 낮기 때문에 정밀한 제어가 요구되는 곳에 사용하기에는 무리가 있습니다.
접촉센서
- 접촉센서의 상태(접촉 여부)를 읽어오기 위해 사용하는 파라미터입니다. ([접촉센서 부품] 설명을 보시려면 여기를 참고하세요.)
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 값을 읽었을 때, 참 ( TRUE, 숫자 1 ) 일 경우 접촉 상태이며, 거짓 ( FALSE, 숫자 0 ) 일 경우 비접촉 상태입니다.
사용 예제
-
포트 3의 접촉센서가 눌린 경우 특정 구간을 실행하도록 하는 예제입니다.
LED모듈
LED 모듈의 왼쪽과 오른쪽 LED 를 ON/OFF 하거나 현재 상태를 읽어오기 위해 사용하는 파라미터입니다.
([LED 모듈 부품] 설명을 보시려면 여기를 참고하세요.)
사용 가능 제어기
- 제어기별 연결장치 바로가기
특성
-
LED 모듈 출력 상수를 사용할 수 있습니다.
-
실제 제어값은 0 ~ 3 사이의 숫자를 사용하며, LED모듈 값을 설정하거나, 읽어왔을 때 각 값이 나타내는 의미는 아래와 같습니다.
- 0 : 양 쪽 LED 모두 꺼짐
- 1 : 오른쪽 LED 만 켜짐
- 2 : 왼쪽 LED 만 켜짐
- 3 : 양 쪽 LED 모두 켜짐
사용 예제
-
포트 3의 LED모듈을 모두 켜는 예제입니다.

사용 팁
- LED 모듈과 포트 호환이 되는 다른 모듈(적외선센서 모듈, 서보모터 등)을 연결한 포트를 LED 모듈 제어 방식으로 제어하는 프로그램을 실행할 경우 모듈이 손상될 수 있으니 주의하세요.
적외선센서
적외선 센서 모듈의 센서 값을 읽어오기 위해 사용하는 파라미터입니다.([적외선센서 부품] 설명을 참고하세요.)
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 적외선 센서 값은 0 ~ 1023 사이의 값을 갖습니다.
- 같은 색의 물체라면 거리가 가까울 수록 1023 에 가까운 값(큰 값)을 가지며, 거리가 멀 수록 0 에 가까운 값(작은 값)을 가집니다.
- 같은 거리의 물체라면 밝은 색(흰 색)에 가까울 수록 1023 에 가까운 값(큰 값)을 가지며, 어두운 색(검은 색)에 가까울 수록 0 에 가까운 값(작은 값)을 가집니다.
사용 예제
-
포트 3의 적외선 센서값이 500보다 작을 경우 특정 구간을 실행하도록 하는 예제입니다.
사용 팁
- 적외선센서 모듈과 포트 호환이 되는 다른 모듈(LED 모듈, 서보모터 등)을 연결한 포트를 적외선센서 모듈 제어 방식으로 제어하는 프로그램을 실행할 경우 모듈이 손상될 수 있으니 주의하세요.
컬러센서
- 컬러센서 전방의 물체 색상을 감지합니다. ([컬러센서 부품] 설명을 참고하세요.)
사용 가능 제어기
- 제어기별 연결장치 바로가기
특성
-
값을 읽었을 때.
사용 예제
-
포트 3의 컬러센서가 빨간 색을 감지한 경우 특정 구간을 실행하도록 하는 예제입니다.
자석센서
자석센서의 가까이에 자석이 있는지를 알려주는 파라미터입니다. ([자석센서 부품] 설명을 참고하세요.)
사용 가능 제어기
- 제어기별 연결장치 바로가기
특성
- 값을 읽었을 때, 참 ( TRUE, 숫자 1 ) 일 경우 가까이에 자석이 있으며, 거짓 ( FALSE, 숫자 0 ) 일 경우 가까이에 자석이 없는 상태입니다.
사용 예제
-
포트 3의 자석센서에 자석이 감지된 경우 특정 구간을 실행하도록 하는 예제입니다.
절대거리센서
절대 거리 센서값 을 읽어올 때 사용하는 파라미터 입니다. ([절대거리 센서 부품] 설명을 참고하세요.)
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 절대거리센서 값은 0 ~ 1023 사이의 값을 갖습니다.
- 같은 색의 물체라면 거리가 가까울 수록 1023 에 가까운 값을 가지며, 거리가 멀 수록 0 에 가까운 값을 가집니다.
- 적외선 센서와 달리 색에 거의 영향을 받지 않습니다.
사용 예제
-
포트 3의 거리 센서값이 500보다 작을 경우 특정 구간을 실행하도록 하는 예제입니다.
사용자 장치
사용자 장치값을 읽어오거나, 설정할 때 사용하는 파라미터 입니다. ([사용자 센서 제작]에 대한 설명을 참고하세요.)
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 값을 읽을 때와 쓸 때는 사용하는 주소값은 같지만, 포트핀이 물리적으로 다릅니다. ([사용자 장치 포트핀 정보] 확인하기)
- 사용자 장치값을 읽어오면, 입력 포트를 통해 들어오는 전압의 레벨값을 출력합니다.
- 값을 읽었을 때 범위는 0 ~ 1023입니다.
- 사용자 장치에 1을 설정하면 출력 포트로 5V가 출력됩니다.
- 사용자 장치를 1로 설정한다 해도, 읽었을 때 1이 읽혀지는 것은 아닙니다.
- 사용자 장치 출력을 위해 포트 값 상수를 사용할 수 있습니다.
사용 예제
-
포트 3의 사용자 장치에 1(HIGH)을 설정합니다. 포트 3에서 읽어온 값이 500보다 작을 경우 출력포트에 0(LOW)을 설정합니다.
다이나믹셀 파라미터
모터 켜기
모터를 켜거나 끄기 위해 사용하는 파라미터입니다. 또한, 현재 모터의 켜짐/꺼짐 상태를 읽어올 수 있습니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
참/거짓 상수를 사용합니다.
- 참 ( TRUE, 숫자 1 ) : 모터 켜기 파라미터에 참을 설정하면 모터가 켜집니다. 파라미터 값을 읽었을 때 값이 참이면 모터가 켜져 있는 상태임을 나타냅니다.
- 거짓 ( FALSE, 숫자 0 ) : 모터 켜기 파라미터에 거짓을 설정하면 모터가 꺼집니다. 파라미터 값을 읽었을 때 값이 거짓이면 모터가 꺼져 있는 상태임을 나타냅니다.
사용 예제
-
제어기의 버튼 R이 눌리면 ID1의 액츄에이터를 켜고, L이 눌리면 끕니다.

LED
다이나믹셀의 LED 상태를 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
참/거짓 상수를 사용합니다.
- 참 ( TRUE, 숫자 1 ) : LED 파라미터에 참을 설정하면 LED 가 켜집니다. 파라미터 값을 읽었을 때 값이 참이면 LED 가 켜져 있는 상태임을 나타냅니다.
- 거짓 ( FALSE, 숫자 0 ) : LED 파라미터에 거짓을 설정하면 LED 가 꺼집니다. 파라미터 값을 읽었을 때 값이 거짓이면 LED 가 꺼져 있는 상태임을 나타냅니다.
사용 예제
-
LED 를 1초간 켰다가 끕니다.
PID 제어
액츄에이터의 PID 설정값을 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- P Gain은 Propotional Gain값 입니다. 작은 값일수록 유격이 커지고, 목표위치 근처에서의 출력정도가 약해집니다.
- I Gain은 Integral Gain값 입니다.
- D Gain은, Derivative Gain값 입니다.
- 값의 범위는 0 ~ 254 입니다.
사용 예제
-
P값과 I값을 32로 설정합니다.
CW/CCW Margin
액츄에이터의 Margin 설정값을 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- CM-5
- CM-510
- CM-700
파라미터 특성
- Margin값은 0 ~ 254 사이의 숫자 값을 사용합니다.
- 목표 위치값을 중심으로 Margin설정값만큼 아무런 힘이 걸리지 않는 구간이 생기게 됩니다.
- 권장값은 1입니다. 특별한 경우가 아니면 기본 설정값을 바꾸지 않는 것이 좋습니다.
사용 예제
-
Margin값을 모두 1로 설정합니다.
CW/CCW Slope
액츄에이터의 Slope설정값을 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- CM-5
- CM-510
- CM-700
파라미터 특성
- CW/CCW 방향 별로 존재하며 목표 위치 근처에서 출력의 정도를 설정합니다.
- 낮은 값을 설정하면 목표위치까지 거의 힘을 줄이지 않고 다가가며, 높은 값을 설정하면 목표위치에 도달할 수록 힘을 줄이면서 다가갑니다.
- 낮은 값을 설정하면 목표위치에서 벗어나지 않으려고 최대의 힘으로 저항을 합니다.
- 높은 값을 설정해도 목표위치에서 너무 많이 벗어나면 점점 최대 힘으로 저항을 합니다.
- Compliance Slope 는 입력되는 Data 값의 범위에 따라 총 7 단계의 Data 대표 값으로 바뀌어 적용됩니다. 즉, Data 값으로 25 를 넣더라도 실제로는 Data 대표값인 16 이 사용됩니다.
| 단계 | Data 값 | Data 대표 값 |
|---|---|---|
| 1 | 0 (0x00) ~ 3(0x03) | 2 (0x02) |
| 2 | 4(0x04) ~ 7(0x07) | 4 (0x04) |
| 3 | 8(0x08)~15(0x0F) | 8 (0x08) |
| 4 | 16(0x10)~31(0x1F) | 16 (0x10) |
| 5 | 32(0x20)~63(0x3F) | 32 (0x20) |
| 6 | 64(0x40)~127(0x7F) | 64 (0x40) |
| 7 | 128(0x80)~254(0xFE) | 128 (0x80) |
- Compliance Slope과 힘 조절, Compliance Margin을 적절한 값으로 설정하면 좀 더 부드러운 동작이 가능합니다.
사용 예제
-
Slope값을 모두 32로 설정합니다. 기본 상수는 2진수로 표현됩니다.

목표 위치
액츄에이터의 목표 위치값을 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 위치 값 상수를 사용합니다.
- 값 입력창에 원하는 설정값을 직접 입력할 수 있으며, 다이얼을 돌려 원하는 위치를 설정할 수 있습니다.
- AX, DX, RX-series 의 위치 값 범위는 0 ~ 1023입니다.
-
MX, EX-series 의 위치 값 범위는 0 ~ 4,095입니다.
사용 예제
-
제어기의 버튼 R이 눌리면 ID1의 액츄에이터 목표 위치를 0으로 설정하고, L이 눌리면 1023으로 설정합니다.

이동 속도
액츄에이터의 이동 속도를 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
-
모터 제어 값 상수를 사용합니다.
- 관절 모드에서 회전 방향값은 의미가 없고, 출력값만 반영됩니다.
- 관절 모드에서 값이 0일 때는 최대 출력으로 설정됩니다.
- 무한 회전 모드에서는 회전 방향과 출력값을 같이 설정합니다.
- 관절 모드와 무한 회전 모드는 로보플러스 매니저에서 설정할 수 있습니다.(액츄에이터 모드 설정 참조)
사용 예제
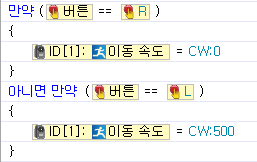
-
제어기의 버튼 R이 눌리면 ID1의 액츄에이터 이동 속도를 0으로 설정하고, L이 눌리면 500으로 설정합니다. (만약 액츄에이터가 관절 모드인 경우, 이동 속도 0은 최대 출력으로 설정됩니다.)
힘 조절
액츄에이터의 힘 조절 상태를 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 힘 조절 값은 0 ~ 1023 사이의 숫자 값을 사용합니다.
사용 예제
-
ID 1인 액츄에이터에 동작 최대 힘을 500으로 설정합니다.

현재 위치
액츄에이터의 현재 위치를 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 액츄에이터의 현재 위치를 읽어올 수 있습니다.
사용 예제
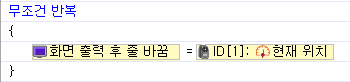
-
ID가 1로 설정된 액츄에이터의 현재 위치를 화면출력 합니다.
현재 속도
액츄에이터의 현재 위치를 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 액츄에이터의 현재 속도를 읽어올 수 있습니다.
사용 예제
-
ID가 1로 설정된 액츄에이터의 현재 속도를 화면출력 합니다.
현재 하중
액츄에이터의 현재 하중을 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 액츄에이터의 현재 하중을 읽어올 수 있습니다.
사용 예제
-
ID가 1로 설정된 액츄에이터의 현재 하중을 화면출력 합니다.
전압
다이나믹셀의 현재 전압을 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 다이나믹셀의 현재 전압을 읽어올 수 있습니다.
- 실제 전압값은 10으로 나눈 값입니다. 출력값이 115인 경우 11.5V를 의미합니다.
사용 예제
-
ID가 1로 설정된 다이나믹셀의 현재 전압값을 화면출력 합니다.
온도
다이나믹셀의 현재 온도를 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 다이나믹셀의 현재 온도를 읽어올 수 있습니다.
사용 예제
-
ID가 1로 설정된 다이나믹셀의 현재 온도를 화면출력 합니다.
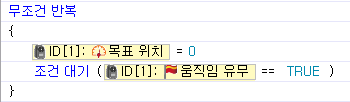
움직임 유무
액츄에이터의 현재 움직임 유무를 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 액츄에이터의 현재 움직임 유무를 읽어올 수 있습니다.
- 현재 움직이는 상태면 1값이 읽어지며, 움직이지 않으면 0값이 읽어집니다.
사용 예제
-
ID가 1로 설정된 액츄에이터의 목표 위치를 0으로 설정하고, 움직임이 멈출 때 까지 대기합니다.
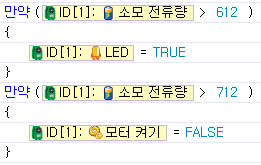
소모 전류량
소모 전류량을 확인하기 위한 파라미터 입니다. 현재 다이나믹셀이 소모하고 있는 전류를 읽어올 수 있습니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 값이 512일 경우에 소모하는 전류는 0암페어이며, 전류가 흐르지 않고 있다는 것을 의미합니다.
- 데이터가 512보다 클 경우에는 모터를 시계방향으로 돌리는 전류가 흐르고 있다는 것이며 전류의 크기는 데이터의 크기와 비례합니다. (값 단위 1 = 약 10mA)
- 예를 들어 데이터가 612 일 경우 (612-512=100 => 100x10mA = 1,000mA) 1A 전류가 모터를 시계방향으로 돌리고 있다는 것을 의미합니다.
- 데이터가 512보다 작을 경우에는 모터를 반 시계방향으로 돌리는 전류가 흐르고 있다는 전류의 크기는 데이터의 크기와 반비례합니다. (값 단위 1 = 약 10mA)
- 예를 들어 데이터가 312일 경우 (512-312=200 => 200x10mA=2,000mA) 2A 의 전류가 모터를 반시계방향으로 돌리고 있다는 것을 의미합니다.
사용 예제
-
ID가 1인 EX 모터의 소모 전류량이 시계방향으로 1A 이상 흐른다면 모터의 LED를 켜고, 2A이상 흐른다면 모터의 토크를 끕니다.
통합센서 S1
거리센서 값
통합센서(S1)의 현재 거리센서값을 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 통합센서(S1)의 현재 거리 센서값을 읽어올 수 있습니다.
- 물체의 색상에 따라, 주변 조명의 상태에 따라 적외선 센서 값은 차이가 있을 수 있으므로 물체와의 정확한 거리를 측정하기 위해 적외선 센서를 사용하는 것은 적합하지 않습니다.
- 위에서와 같이 같은 거리의 물체라도 색상에 따라 적외선 센서 값이 달라지는 특성을 이용하여 흰 색과 검은 색을 구분하는 용도로 적외선 센서를 사용할 수 있습니다. (라인트레이서에 활용)
- 거리 센서 값은 0 ~ 255 사이의 범위를 갖습니다.
사용 예제
-
왼쪽 적외선 센서에만 물체가 감지될 경우와 오른쪽 적외선 센서에만 물체가 감지될 경우에 특정 행동을 하도록 하는 예제
사용 팁
- 햇빛이나 형광등과 같은 적외선을 발산하는 외부 조명에 의해 센서 값이 변화할 수 있습니다.
- 물체의 색상에 따라, 주변 조명의 상태에 따라 적외선 센서 값은 차이가 있을 수 있으므로 물체와의 정확한 거리를 측정하기 위해 적외선 센서를 사용하는 것은 적합하지 않습니다.
- 위에서와 같이 같은 거리의 물체라도 색상에 따라 적외선 센서 값이 달라지는 특성을 이용하여 흰 색과 검은 색을 구분하는 용도로 적외선 센서를 사용할 수 있습니다. (라인트레이서에 활용)
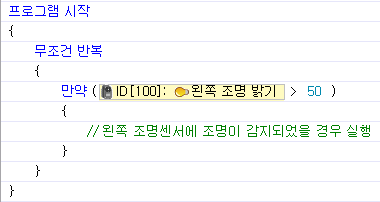
조명 밝기
통합센서(S1)의 현재 조명 밝기값을 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 통합센서(S1)의 현재 조명 밝기값을 읽어올 수 있습니다.
- 촛불이나 전구 등 근거리의 조명에서 나오는 광량을 측정할 수 있습니다.
- 조명 밝기 값은 0 ~ 255 사이의 범위를 갖습니다.
사용 예제
-
왼쪽 조명센서에 50보다 큰 조명값이 감지될 때 실행하는 예제
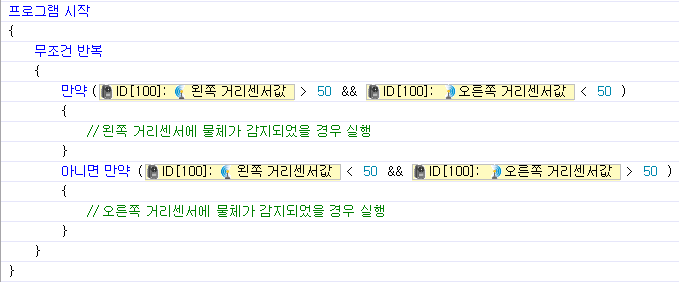
물체감지
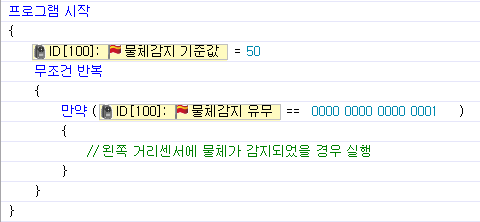
통합센서(S1)의 적외선 센서(왼쪽/중앙/오른쪽)에 물체 감지 기준 값에서 지정된 거리 값 이내로 물체가 감지되었는지 유/무를 판단하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 통합센서(S1)의 각 적외선 센서에 물체 감지 기준 값에 지정된 거리 값 이내로 물체가 감지되면 아래와 같은 값을 발생시킵니다.
- 아래 값은 bit 값으로, 2진수 숫자 값을 사용할 수 있습니다.

| 2 진수 값 | 10 진수 값 | 물체 감지 유무 명령어에서의 의미 |
|---|---|---|
| 000 | 0 | 물체가 감지 안됨 |
| 001 | 1 | 왼쪽 센서에서 감지 됨 |
| 010 | 2 | 중앙 센서에서 감지 됨 |
| 011 | 3 | 왼쪽과 중앙 센서에서 감지 됨 |
| 100 | 4 | 오른쪽 센서에서 감지 됨 |
| 101 | 5 | 오른쪽과 왼쪽 센서에서 감지 됨 |
| 110 | 6 | 오른쪽과 중앙 센서에서 감지 됨 |
| 111 | 7 | 모든 방향의 센서에서 감지 됨 |
사용 예제
-
물체값지 기준값을 50으로 설정하고, 왼쪽 거리센서에 물체가 감지되었을 경우 실행하는 예제
조명감지
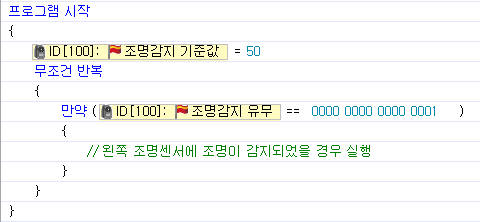
통합센서(S1)의 조명 센서(왼쪽/중앙/오른쪽)에 조명 감지 기준 값에서 지정된 거리 값 이내로 조명이 감지되었는지 유/무를 판단하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 통합센서(S1)의 각 조명 센서에 조명 감지 기준 값에 지정된 조명센서 값 이내로 조명이 감지되면 아래와 같은 값을 발생시킵니다.
-
아래 값은 bit 값으로, 2진수 숫자 값을 사용할 수 있습니다.

| 2 진수 값 | 10 진수 값 | 조명 감지 유무 명령어에서의 의미 |
|---|---|---|
| 000 | 0 | 조명 감지 안됨 |
| 001 | 1 | 왼쪽 조명 센서에서 감지 됨 |
| 010 | 2 | 중앙 조명 센서에서 감지 됨 |
| 011 | 3 | 왼쪽과 중앙 조명 센서에서 감지 됨 |
| 100 | 4 | 오른쪽 조명 센서에서 감지 됨 |
| 101 | 5 | 오른쪽과 왼쪽 조명 센서에서 감지 됨 |
| 110 | 6 | 오른쪽과 중앙 조명 센서에서 감지 됨 |
| 111 | 7 | 모든 방향의 조명 센서에서 감지 됨 |
사용 예제
-
조명값지 기준값을 50으로 설정하고, 왼쪽 조명센서에 빛이 감지되었을 경우 실행하는 예제
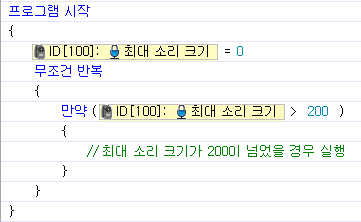
최대 소리 크기
통합센서(S1)의 최대 소리크기를 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 통합센서(S1)에서 감지된 최대 소리 크기를 읽어옵니다.
- 소리 크기가 최대 소리 크기 값을 넘어서는 경우, 소리 크기값을 최대 소리 크기값으로 복사를 하게 됩니다.
- ‘최대 소리 크기’값은 0 ~ 255 사이의 숫자를 사용합니다.
- 최대 소리 크기는 자동으로 초기화 되지 않기 때문에 사용자가 직접 0 으로 초기화 해 주어야 합니다.
사용 예제
-
최대 소리 크기를 0으로 초기화 하고, 최대 소리 크기가 200을 넘었을 때 실행되는 예제
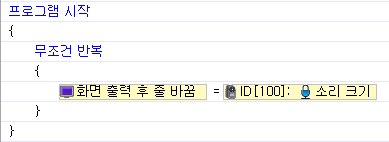
소리 크기
통합센서(S1)의 현재 소리 크기값을 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- CM-5
- CM-510
- CM-700
파라미터 특성
- 통합센서(S1)의 소리 크기값을 읽어올 수 있습니다.
- 소음이 없을 때는 기본적으로 127 근처의 값이 읽어지며, 소리가 커질 수록 소리 크기값의 변화폭이 커집니다. (큰소리가 날 수록 127값을 중심으로, 0과 255근처로 크게 진동하게 됩니다.)
- ‘소리 크기’값은 0 ~ 255 사이의 값이 출력됩니다.
사용 예제
-
현재 소리 크기를 화면출력 합니다.
소리감지 횟수
통합센서(S1)의 소리감지 횟수를 읽어오거나 초기화하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- ‘소리감지 횟수’는 0 ~ 255 사이의 숫자를 사용합니다.
- 연속적인 소리의 입력이 멈추어야 ‘소리감지 횟수’ 파라미터에 현재까지 감지된 소리의 횟수 값이 입력됩니다.
- 소리감지 횟수는 자동으로 초기화 되지 않기 때문에 소리감지를 시작하기 전에 사용자가 직접 0 으로 초기화 해 주어야 합니다.
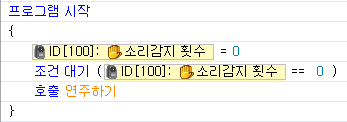
사용 예제
-
소리감지 횟수를 0으로 초기화 하고, 소리가 감지될 때까지 대기합니다. 이 후 연주하기 함수를 호출합니다.
소리발생 시간
통합센서(S1)의 소리발생 시간을 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- ‘소리 발생 시간’은 0 ~ 65535 사이의 숫자를 사용합니다.
- 소리감지 횟수를 0으로 초기화 하면, 소리 발생 시간값도 0으로 초기화 됩니다.
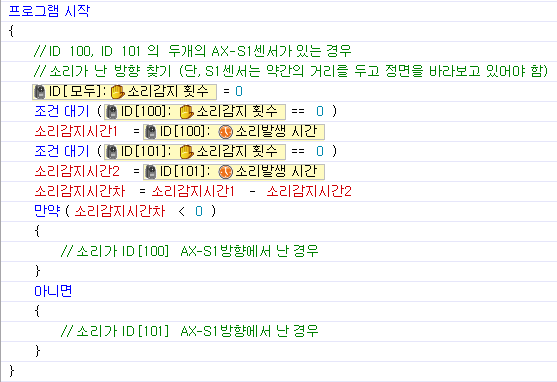
사용 예제
-
두 개의 AX-S1센서를 이용해 소리가 난 방향을 찾는 예제 입니다.
부저 음계
통합센서(S1)의 버저 음계값을 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- ‘버저 울림 시간’과 반드시 함께 사용되어야 하며, ‘버저 울림 시간’을 먼저 설정하고 난 후 ‘버저 종류’를 설정해야 설정에 맞게 소리가 납니다. (순서 중요) (‘버저 울림 시간’에 대한 자세한 정보는 여기를 참고하세요.)
- ‘버저 울림 시간’ 설정 값에 따라 멜로디 상수나 음계 값 상수를 사용하여 ‘버저 종류’를 설정할 수 있습니다.
- ‘버저 울림 시간’ 값이 255 인 경우 : 특수 멜로디 연주 모드
-
‘버저 종류’에 멜로디 상수를 사용하여 0 ~ 25 번 사이의 26가지 멜로디 중 하나를 선택하여 연주합니다.

- ‘버저 울림 시간’ 값이 0 ~ 254 사이의 값인 경우 : 음계 연주 모드
-
‘버저 종류’에 음계 값 상수를 사용하여 0 ~ 51 사이의 음계 값을 넣어 하나의 음계를 ‘버저 울림 시간’에 설정된 시간만큼 연주합니다.
사용 예제
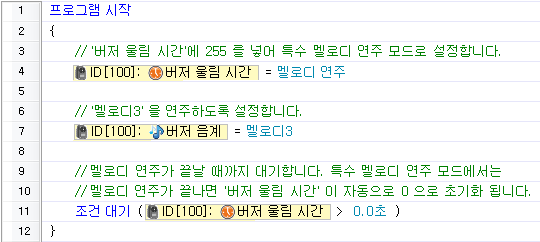
-
멜로디3 을 연주하는 예제입니다.
-
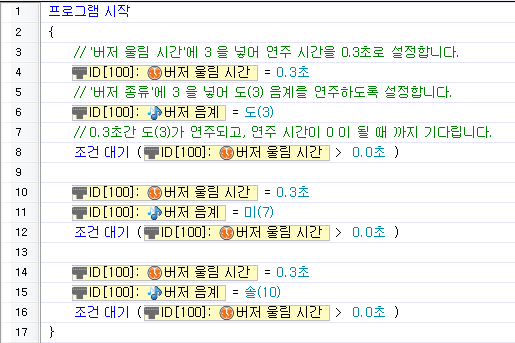
0.3초씩 “도미솔”을 연주하는 예제입니다.
부저 울림시간
통합센서(S1)의 버저 울림 시간을 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- CM-5
- CM-510
- CM-700
파라미터 특성
- ‘버저 종류’와 반드시 함께 사용되어야 하며, ‘버저 울림 시간’을 먼저 설정하고 난 후 ‘버저 종류’를 설정해야 설정에 맞게 소리가 납니다. (순서 중요) (‘버저 종류’에 대한 자세한 정보는 여기를 참고하세요.)
- 버저 울림 시간 값 상수를 사용하여 ‘버저 울림 시간’을 설정할 수 있습니다.
- 실제 ‘버저 울림 시간’ 값은 0 ~ 255 사이의 숫자를 사용합니다.
- 숫자 1 은 연주 시간 0.1 초를 의미하며 최소 버저 울림 시간은 0.1초, 최대 버저 울림 시간은 5초 입니다.
- 따라서 50 ~ 254 사이의 값을 입력하면 버저는 최대 울림 시간인 5초간 울리게 됩니다.
- ‘버저 울림 시간’값이 255 인 경우 : 특수 멜로디 연주 모드
- ‘버저 종류’에 멜로디 상수를 사용하여 0 ~ 25 번 사이의 26가지 멜로디 중 하나를 선택하여 연주합니다.
-
멜로디의 연주가 끝나면 자동으로 ‘버저 울림 시간’값이 0으로 초기화 됩니다.
- ‘버저 울림 시간’값이 0 ~ 254사이의 값인 경우 : 음계 연주 모드
- ‘버저 종류’에 음계 값 상수를 사용하여 0 ~ 50 사이의 음계값을 넣어 하나의 음계를 ‘버저 울림 시간’에 설정된 시간만큼 연주합니다.
-
254의 값으로 설정하면, 소리가 멈추지 않고 계속 울리게 됩니다.
사용 예제
-
멜로디3 을 연주하는 예제입니다.
-
0.3초씩 “도미솔”을 연주하는 예제입니다.
새 리모컨 데이터
무선 통신 모듈을 통해 수신한 데이터 중 확인하지 않은 데이터가 남아 있는지 여부를 나타내는 파라미터 입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 숫자 1 : 확인하지 않은 새 무선 데이터가 수신 버퍼에 들어 있음을 나타냅니다.
- 숫자 0 : ‘받은 리모컨 데이터’ 파라미터를 사용하여 수신 버퍼의 모든 데이터를 확인하였음을 나타냅니다.
사용 예제
-
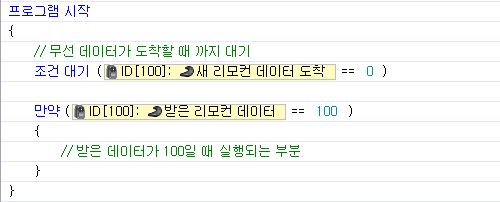
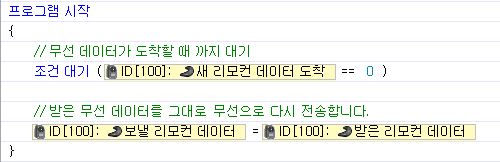
새 리모컨 데이터가 도착할 때까지 대기한 후, 받은 리모컨 데이터가 100일 때 실행하는 예제
받은 리모컨 데이터
무선 통신 모듈을 통해 데이터를 수신한 경우 수신한 데이터를 읽어가기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- CM-5
- CM-510
- CM-530
- CM-700
파라미터 특성
- 데이터는 0 ~ 65535 사이의 숫자 값입니다.
- 확인하지 않은 새로운 받은 데이터가 들어 있는지 여부는 새 리모컨 데이터 도착 을 이용하여 알 수 있습니다.
- 수신 버퍼를 통해 최대 2 개의 받은 무선 데이터 값을 저장할 수 있습니다.
- 2 개의 데이터가 수신 버퍼에 저장되어 있는 경우 읽기 동작을 수행하면 먼저 받은 데이터가 읽혀지고, 읽혀진 데이터는 수신 버퍼에서 지워집니다. 1 개의 데이터만 수신 버퍼에 남아 있는 경우 읽기 동작을 수행하면 가장 최근에 받았던 데이터를 얻게 됩니다.
사용 예제
-
새 리모컨 데이터가 도착할 때까지 대기한 후, 받은 리모컨 데이터가 100일 때 실행하는 예제
보낼 리모컨 데이터
제어기에서 무선 통신 모듈을 통해 외부로 데이터를 전송하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- CM-5
- CM-510
- CM-530
- CM-700
파라미터 특성
- 보낼 데이터는 0 ~ 65535 사이의 숫자 값입니다.
- 보낼 무선 데이터 파라미터에 값을 설정하면 바로 무선으로 설정된 데이터를 전송합니다.
사용 예제
-
무선 데이터의 수신을 기다리다가 데이터가 도착하면 그 데이터를 그대로 다시 무선으로 보내주는 예제입니다.
물체감지 기준값
통합센서(S1)의 물체감지 기준값을 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 물체감지 유무를 판단하는 기준값을 설정합니다.
- 근거리 감지 모드와 원거리 감지 모드가 있습니다.
- 거리 감지 기준값을 0으로 설정하면 근거리 감지 모드로 동작하게 됩니다.
사용 예제
-
물체값지 기준값을 50으로 설정하고, 왼쪽 거리센서에 물체가 감지되었을 경우 실행하는 예제
조명감지 기준값
통합센서(S1)의 조명감지 기준값을 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- CM-5
- CM-510
- CM-700
파라미터 특성
- 조명감지 유무를 판단하는 기준값을 설정합니다.
사용 예제
-
조명값지 기준값을 50으로 설정하고, 왼쪽 조명센서에 빛이 감지되었을 경우 실행하는 예제
적외선 센서 어레이
적외선 센서 값
적외선 센서 어레이의 적외선 센서 값 을 읽어오기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 적외선 센서 어레이의 1번부터 7번까지의 현재 적외선센서값을 읽어올 수 있습니다. 0~5cm 이내에서 사용하도록 최적화 되었습니다.
- 적외선 측정 방식이기 때문에 벽이나 물체의 표면 색이나 질감에 따라 적외선 반사율이 차이가 있으므로 측정값에 차이가 생길 수 있습니다.
- 센서 값은 0 ~ 1023 사이의 범위를 갖습니다.
사용 예제
-
어레이 번호에 따라 센서값이 감지되면다른 음계를 소리냅니다.

사용 팁
- 햇빛이나 형광등과 같은 적외선을 발산하는 외부 조명에 의해 센서 값이 변화할 수 있습니다.
- 물체의 색상에 따라, 주변 조명의 상태에 따라 적외선 센서 값은 차이가 있을 수 있으므로 물체와의 정확한 거리를 측정하기 위해 적외선 센서를 사용하는 것은 적합하지 않습니다.
- 위에서와 같이 같은 거리의 물체라도 색상에 따라 적외선 센서 값이 달라지는 특성을 이용하여 흰 색과 검은 색을 구분하는 용도로 적외선 센서를 사용할 수 있습니다. (라인트레이서에 활용)
IR 어레이 부저 음계
적외선 센서 어레이의 버저 음계값을 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- ‘버저 울림 시간’과 반드시 함께 사용되어야 하며, ‘버저 울림 시간’을 먼저 설정하고 난 후 ‘버저 종류’를 설정해야 설정에 맞게 소리가 납니다. (순서 중요) (‘버저 울림 시간’에 대한 자세한 정보는 여기를 참고하세요.)
- ‘버저 울림 시간’ 설정 값에 따라 멜로디 상수나 음계 값 상수를 사용하여 ‘버저 종류’를 설정할 수 있습니다.
- ‘버저 울림 시간’ 값이 255 인 경우 : 특수 멜로디 연주 모드
-
‘버저 종류’에 멜로디 상수를 사용하여 0 ~ 25 번 사이의 26가지 멜로디 중 하나를 선택하여 연주합니다.
- ‘버저 울림 시간’ 값이 0 ~ 254 사이의 값인 경우 : 음계 연주 모드
-
‘버저 종류’에 음계 값 상수를 사용하여 0 ~ 51 사이의 음계 값을 넣어 하나의 음계를 ‘버저 울림 시간’에 설정된 시간만큼 연주합니다.
IR 어레이 부저 울림시간
적외선 센서 어레이의 버저 울림 시간을 읽어오거나 설정하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- ‘버저 종류’와 반드시 함께 사용되어야 하며, ‘버저 울림 시간’을 먼저 설정하고 난 후 ‘버저 종류’를 설정해야 설정에 맞게 소리가 납니다. (순서 중요) (‘버저 종류’에 대한 자세한 정보는 여기를 참고하세요.)
- 버저 울림 시간 값 상수를 사용하여 ‘버저 울림 시간’을 설정할 수 있습니다.
- 실제 ‘버저 울림 시간’ 값은 0 ~ 255 사이의 숫자를 사용합니다.
- 숫자 1 은 연주 시간 0.1 초를 의미하며 최소 버저 울림 시간은 0.1초, 최대 버저 울림 시간은 5초 입니다.
- 따라서 50 ~ 254 사이의 값을 입력하면 버저는 최대 울림 시간인 5초간 울리게 됩니다.
- ‘버저 울림 시간’값이 255 인 경우 : 특수 멜로디 연주 모드
- ‘버저 종류’에 멜로디 상수를 사용하여 0 ~ 25 번 사이의 26가지 멜로디 중 하나를 선택하여 연주합니다.
-
멜로디의 연주가 끝나면 자동으로 ‘버저 울림 시간’값이 0으로 초기화 됩니다.
- ‘버저 울림 시간’값이 0 ~ 254사이의 값인 경우 : 음계 연주 모드
- ‘버저 종류’에 음계 값 상수를 사용하여 0 ~ 50 사이의 음계값을 넣어 하나의 음계를 ‘버저 울림 시간’에 설정된 시간만큼 연주합니다.
-
254의 값으로 설정하면, 소리가 멈추지 않고 계속 울리게 됩니다.
사용 예제
-
멜로디3 을 연주하는 예제입니다.
-
0.3초씩 “도미솔”을 연주하는 예제입니다.
감지 기준값 자동설정
검은 색 감지 기준값 자동 찾기의 시작/마침 을 설정하는 파라미터 입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
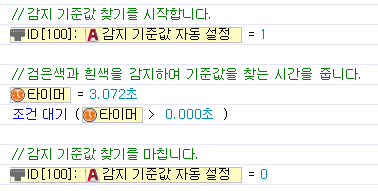
- ‘0’에서 ‘1’로 변할 때 자동찾기를 시작하고 ‘1’에서 ‘0’으로 변할 때 자동찾기를 마칩니다.
- 중간에 타이머를 설정해서 자동찾기를 하는 시간을 할당 해야 합니다.
사용 예제
-
감지 기준값을 1로 설정하고 LED가 깜박일때 흰색과 검은색을 감지시키면 자동으로 기준값이 설정됩니다.
적외선 물체감지
적외선 센서 어레이의 물체 감지 기준 값에서 지정된 거리 값 이내로 물체가 감지되었는지 유/무를 판단하기 위해 사용하는 파라미터입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
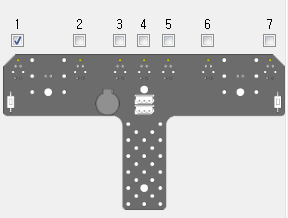
- 적외선 센서 어레이의 각 적외선 센서의 감지 값이 검은 색 감지 기준값보다 작으면 검은 색을 감지하였다고 판단하여 아래와 같이 검은 색 감지 유무값의 특정 Bit을 1로 셋팅해 줍니다. 동시에 해당 LED가 켜집니다.
| 2 진수 값 | 10 진수 값 | 검은색 감지 유무 |
|---|---|---|
| 0000001 | 1 | 1번 적외선 센서에 검은 색 감지 |
| 0000010 | 2 | 2번 적외선 센서에 검은 색 감지 |
| 0000100 | 4 | 3번 적외선 센서에 검은 색 감지 |
| 0001000 | 8 | 4번 적외선 센서에 검은 색 감지 |
| 0010000 | 16 | 5번 적외선 센서에 검은 색 감지 |
| 0100000 | 32 | 6번 적외선 센서에 검은 색 감지 |
| 1000000 | 64 | 7번 적외선 센서에 검은 색 감지 |
-
제품그림을 보며 직접 2진수 값을 체크할 수 있습니다.
사용 예제
-
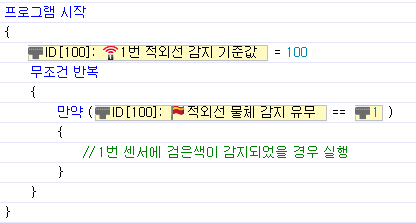
1번 센서의 적외선 감지 기준값을 100 으로 설정하고, 1번센서에 검은색이 감지되면 특정행동을 하도록 하는 예제
적외선감지 기준값
적외선 센서 어레이가 흰 색/검은 색을 판단하는 기준값입니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
파라미터 특성
- 흰 색 과 검은색 을 판단하는 기준값 입니다.
- 적외선 센서값과 검은 색 감지 기준값에 따라, 아래와 같이 행동합니다.
| 검은색 감지 유무 | LED | |
|---|---|---|
| 센서값 <= 기준값 | 해당 BIT 1 | ON |
| 센서값 > 기준값 | 해당 BIT 0 | OFF |
사용 예제
-
1번 센서의 적외선 감지 기준값을 100 으로 설정하고, 1번센서에 검은색이 감지되면 특정행동을 하도록 하는 예제
직접 지정
다이나믹셀 등의 외부 장치의 주소를 직접 접근하여 읽기와 쓰기 작업을 진행할 수 있습니다.
사용 가능 제어기
- 제어기별 연결장치 바로가기
특성
- 사용자가 설정한 주소를 바이트, 워드 단위 중 하나를 선택하여 읽거나 쓰기를 할 수 있습니다.
사용 예제
-
ID가 105로 설정된 다이나믹셀의 25번 워드형 주소 값에 0을 기록합니다.

-
ID가 105로 설정된 다이나믹셀의 25번 워드형 주소의 값을 화면출력 합니다.

변수
프로그램 내부의 저장 공간입니다. 여러가지 데이터를 저장, 수정, 읽기가 가능합니다.
특성
- 같은 이름의 변수가 존재하면 새로 만들어지는 것이 아니라 기존의 변수를 사용하는 것입니다.
- 띄어쓰기를 할 수 없습니다.
- 이름의 첫 글자로 숫자를 사용할 수 없습니다.
- 특수 기호(!, @, #, $ 등)를 사용할 수 없습니다. (단, ‘_‘는 제외)
사용 예제
다음과 같이 여러가지 방법으로 변수를 활용할 수 있으며, 만들어진 변수를 확인할 수 있습니다.
사용 팁
숫자를 기억하고 있어야 하는 경우나 특정 상황에 따라 값을 바꾸어야 하는 경우, 혹은 공통된 값을 한꺼번에 변경해야 할 경우에 유용합니다.