
참고자료
앱에서 영상 스트리밍 기능 설정하기
스트리밍(Streaming)이란 음성이나 영상, 애니메이션 등을 실시간으로 재생하는 기술을 말합니다. ROBOTIS ENGINEER KIT2에서는 Raspberry Pi Camera와 앱을 동일한 와이파이 환경에 연결 한 후 촬영한 영상을 스트리밍 기능을 통해 바로 확인할 수 있습니다.
-
제어기의 전원을 켜고, Raspberry Pi가 부팅될 때까지 기다립니다.
참고: 약 70초 정도가 지나 부팅이 되면 사용자 LED가 노란색으로 켜지고 소리가 납니다.

-
앱이 설치된 기기에서 와이파이 설정을 선택합니다.
-
네크워크 목록에서
Robotis_Rpi_XXXX를 찾아 선택합니다.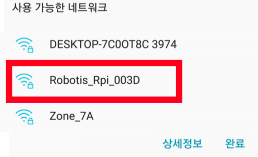
참고: XXXX는 제어기 MAC 주소 4자리 입니다.
-
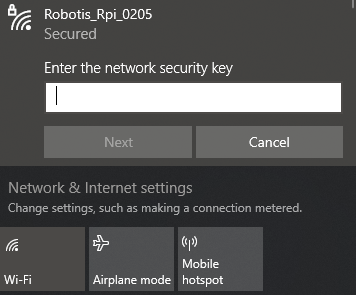
비밀번호 입력창이 나타나면
robotis0을 입력한 후 연결합니다.
-
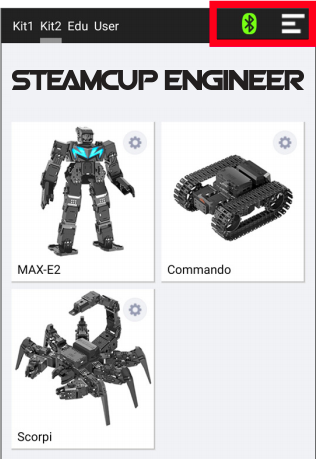
ENGINEER 앱을 실행한 후 우측 상단의 블루투스 아이콘을 눌러 제어기와 연결합니다. 제어기가 연결되면, 아이콘이 초록색으로 바뀝니다.
-
스트리밍 기능이 지원되는 MAX-E2 또는 Commando를 선택하여 스트리밍 기능을 실행하면 아래 화면과 같이 스트리밍 기능을 활용해 로봇을 조종할 수 있습니다.
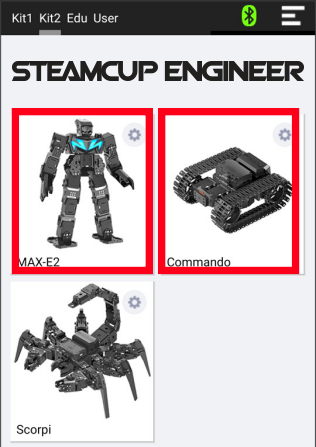
예제 선택
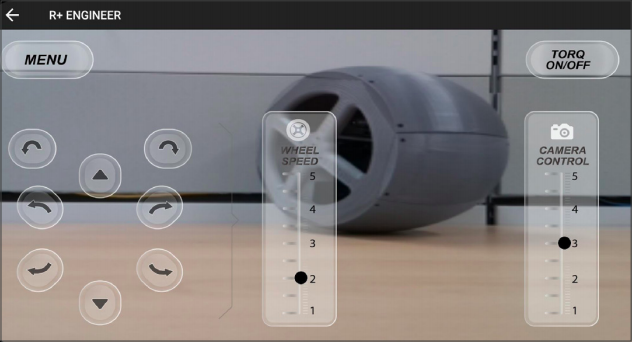
스트리밍 화면
Raspberry Pi 업데이트 및 복구
Raspberry Pi 업데이트 하기
Raspberry Pi Zero 2 W를 업데이트 하여, 엔지니어 키트 2의 새로운 기능을 사용할 수 있습니다.
주의
- Raspberry Pi Zero W 는 해당 업데이트를 지원하지 않습니다. 업데이트 대신, Raspberry Pi 복구 이미지로 기능을 추가할 수 있습니다.
-
보드의 뒷면에서 사용하는 모델의 명칭을 확인하세요.
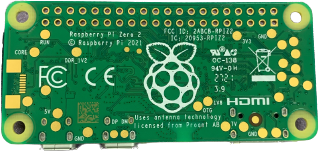
- 엔지니어 키트 2에서 사용되는 Raspberry Pi Zero 2 W 업데이트를 위해, PC에서
dxl.rts파일을 다운로드하세요. -
제어기(CM-550)의 전원을 켜고, Raspberry Pi Zero 2 W가 부팅될 때까지 기다립니다.
참고: 약 70초 정도가 지나 부팅이 되면 사용자 LED가 노란색으로 켜지고 소리가 납니다.
-
Raspberry Pi Zero 2 W가 부팅 되면, PC의 와이파이 검색창에서
Robotis_Rpi_XXXX(XXXX는 제어기 MAC 주소 4자리) 또는Robotis_Rpi이름의 AP에 연결하세요.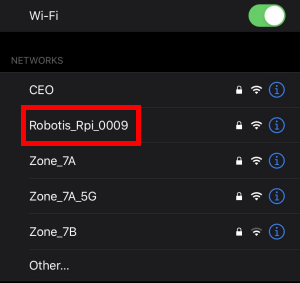
참고: 접근을 위해 계정과 비밀번호를 입력을 요청할 수 있습니다. 아래
계정과패스워드를 입력하세요.
계정: pi
패스워드: robotis0
-
PC의 윈도우 탐색 창을 여세요. (Window10 단축키:
Win+E)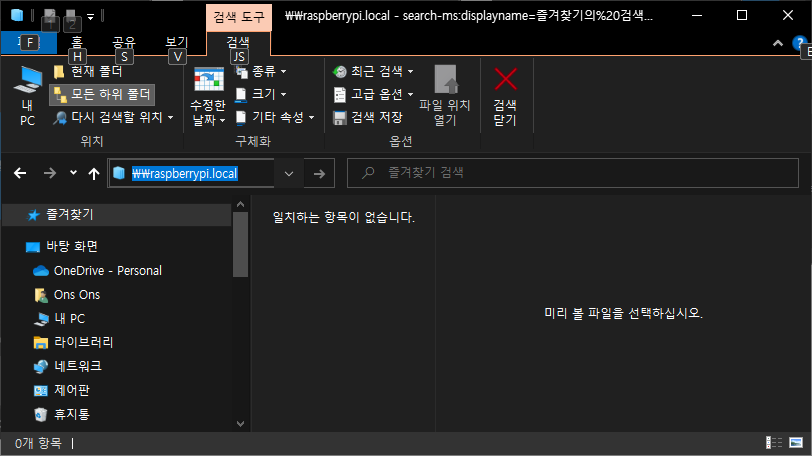
-
PC의 윈도우 탐색기 주소창에 \\raspberrypi.local 를 입력하면,
robotis폴더가 나타납니다.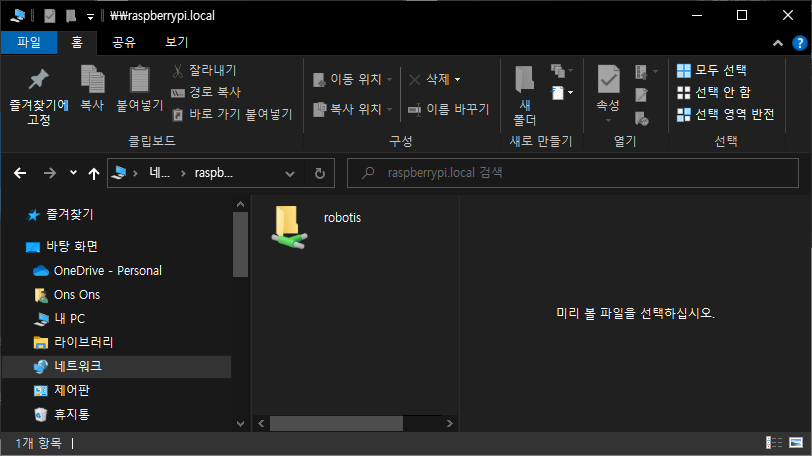
-
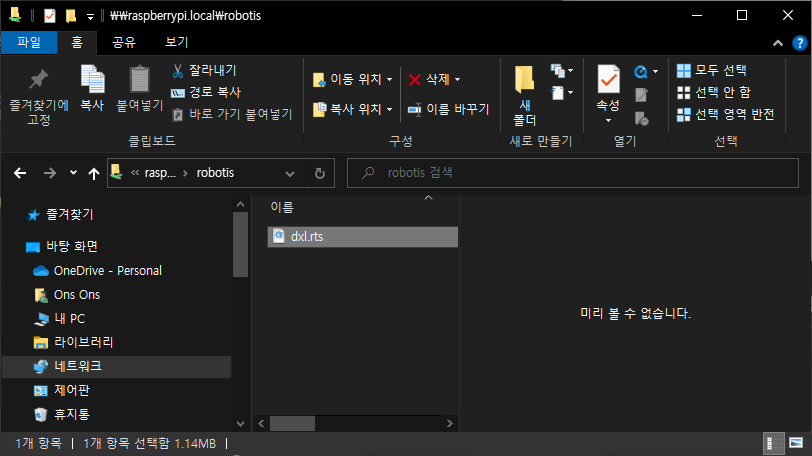
폴더로 접근 후, 다운로드한
dxl.rts파일을robotis폴더에 복사하세요.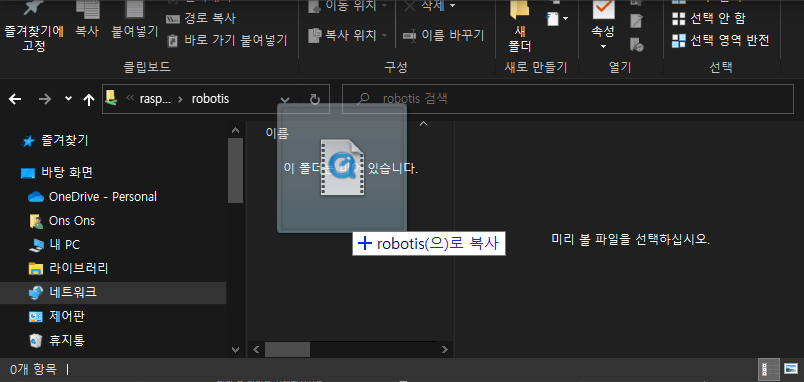
참고: 접근을 위해 계정과 비밀번호를 입력을 요청할 수 있습니다. 아래
계정과패스워드를 입력하세요.
계정: pi
패스워드: robotis0 -
Raspberry Pi Zero 2 W를 재부팅하면 (전원 끄고 켜기) 업데이트가 진행됩니다.
참고: 업데이트가 완료되면 복사된 파일(
dxl.rts)은 자동으로 삭제됩니다.
Raspberry Pi 복구 하기
만약 Raspberry Pi가 부팅시 문제가 있다면 키트전용 라즈비안을 다시 설치하여 해결할수 있습니다.
- 사용하는 Raspberry Pi Zero (W 또는 2W) 버전과 일치하는, 키트전용 라즈비안 이미지 압축 파일을 다운로드 받으세요.
- Raspberry Pi Zero W: Release.zip
- Raspberry Pi Zero 2W: rpi_zero_w_image_v2_0.zip
참고: 사용 중인 라즈베리파이 버전은, 보드의 뒷면에서 확인하세요.
-
파일압축을 해제하세요. 압축해제시 .img 파일이 선택한 폴더에 생성됩니다.
-
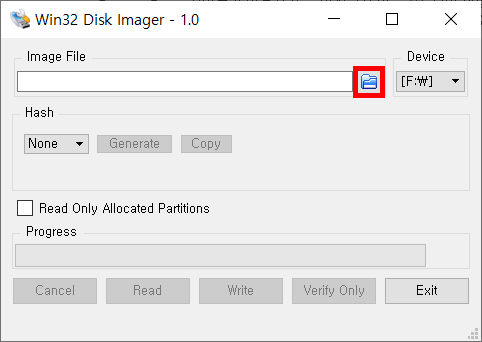
압축해제한 이미지 파일을 Win32DiskImager와 같은 Imager 프로그램을 사용하여 저장매체에 넣어줘야 합니다. 본 매뉴얼에서는 Win32DiskImager를 사용합니다.
-
설치한 Imager를 실행하세요.
-
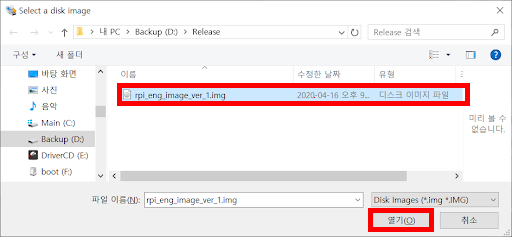
2번 에서 압축해제한 .img 파일를 선택하세요.
-
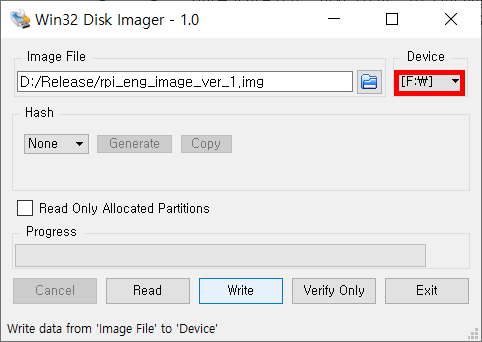
선택한 이미지를 저장할 저장매체를 선택하세요.
-
_Write_를 클릭하고, 키트 전용 라즈비안이 저장매체에 Writing이 완료될때까지 기다립니다.
-
Write가 완료되면 win32diskimager를 종료하고, SD카드를 컴퓨터에서 분리 합니다.
-
분리한 SD 카드를 CM-550에 결합된 Raspberry Pi 슬롯에 삽입합니다.
-
CM-550의 전원을 켜고 부팅이 완료될때까지 기다립니다. 처음 SD 카드 삽입시 자동으로 부팅이 여러번 이루어지며, 완료시 마다 사용자 버튼이 노란색으로 켜지면서 “삐” 소리가 납니다.
참고: 부팅시 약 3분정도 소요됩니다.
-
부팅 후, 스마트기기로 네트워크 목록 검색시, CM-550의 맥 주소와 동일한 이름이 검색 되면 업데이트가 성공적으로 완료된 것입니다.
참고: 맥 주소는 CM-550의 전원 버튼 옆에 표시되어 있습니다.
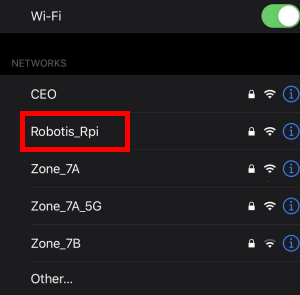
부팅 완료 전 와이파이 검색 결과
부팅 완료 후 와이파이 검색 결과
- 검색된 네트워크를 클릭하고, 비밀번호 입력창이 나타나면
robotis0를 입력 후 기기와 연결 해주세요.
제어기 BLE 신호 세기 설정
CM-550에 내장된 BLE 슬레이브 모듈의 신호의 세기가 약하거나 간섭이 발생할 경우 통신이 불안정할 수 있습니다.
이러한 경우 R+ Manager 2.0을 사용하여 BLE 신호세기를 알맞게 설정할 수 있습니다.
아래 표는 여러개의 CM-550를 한 공간에서 사용할 때 BLE 신호 세기를 설정하는 방법입니다.
| 나의 CM-550 | 주변의 CM-550 | BLE 신호 세기 |
|---|---|---|
| 통신 불안정 | 통신 안정 | 올림 |
| 통신 불안정 | 통신 불안정 | 올림 |
| 통신 안정 | 통신 불안정 | 내림 |
| 통신 안정 | 통신 안정 | 설정 불필요 |
- 한 개의 제어기만을 사용하는 환경에서 통신이 불안정하다면, 신호의 세기가 약할 수 있습니다. BLE 신호 세기를 높여주세요.
- 같은 공간에서 여러 개의 제어기를 사용할 때 통신이 불안정하다면, 제어기의 BLE 신호가 서로 간섭을 줄 수 있습니다. 통신이 불안정한 제어기의 BLE 신호세기를 높이거나 주변 제어기의 BLE 신호 세기를 낮춰주세요.
- 모든 제어기의 통신이 잘 유지된다면 신호의 세기가 충분하고, 다른 제어기에 의해서 간섭이 발생하지 않는 경우입니다. BLE 신호 세기를 유지시켜 주세요.
참고 : 주변 환경과 사용하는 기기의 수에 따라서, BLE 신호 세기 및 간섭의 정도가 달라질 수 있습니다.
-
CM-550의 BLE와 연결되어 있는 BT-410 마스터 모듈 또는 BT-410 동글의 전원이 꺼져있는지 확인합니다.
(만일 전원이 켜져있는 경우 CM-550을 켜는 순간 서로 페어링되기 때문에 BLE 신호 확인 및 설정을 할 수 없습니다) -
CM-550의 전원을 켜고 USB 케이블로 PC에 연결합니다 (외부 전원 없이 USB 케이블로 제어기에 충분한 전원공급이 가능합니다).
-
CM-550의
MODE버튼이 깜박이는 것을 확인합니다. -
R+ Manager 2.0 을 실행합니다.

-
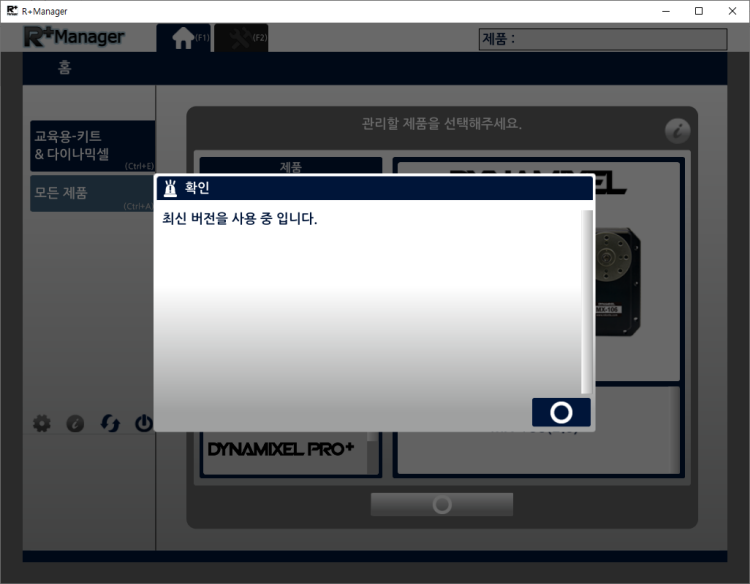
업데이트 검사를 클릭한 다음, R+ Manager 2.0이 최신 버전인지 확인합니다.
-
모든제품탭을 선택합니다.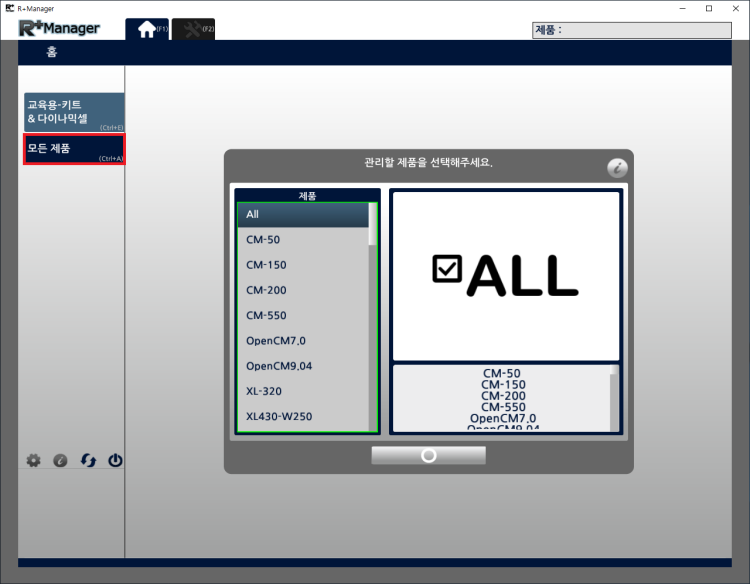
-
제품 중에서 CM-550을 선택 후
확인을 클릭합니다.
-
업데이트 & 테스트를 클릭합니다.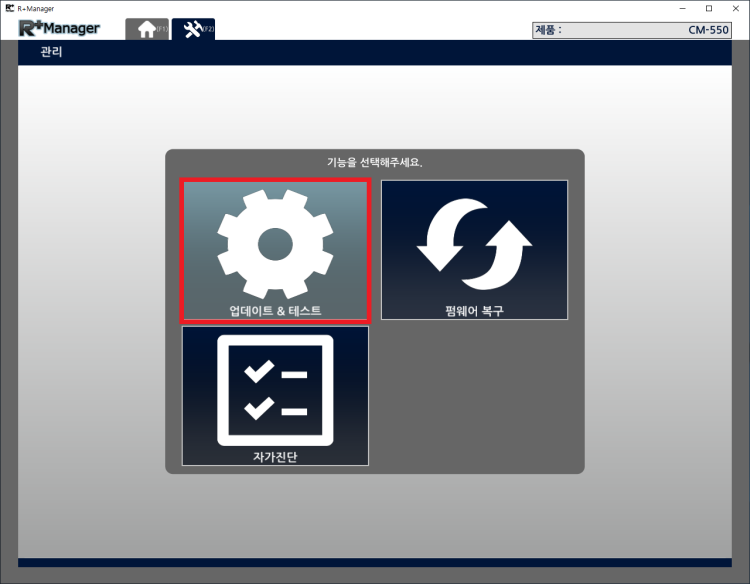
-
다음을 클릭합니다.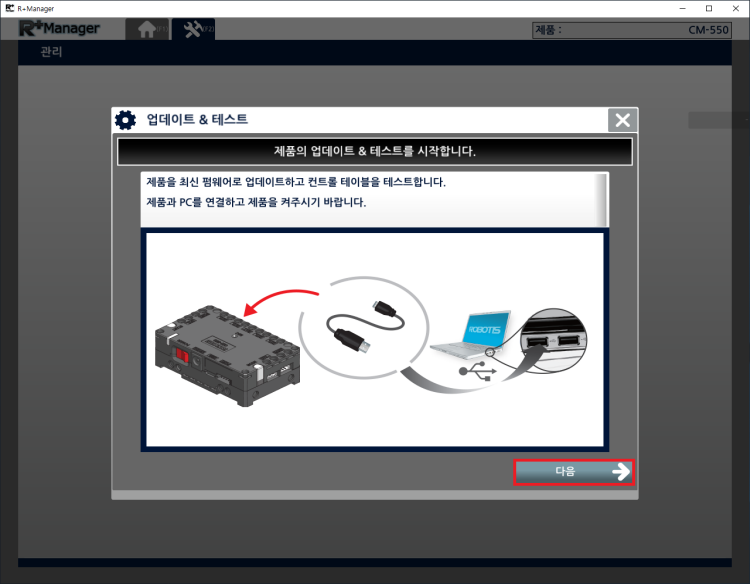
-
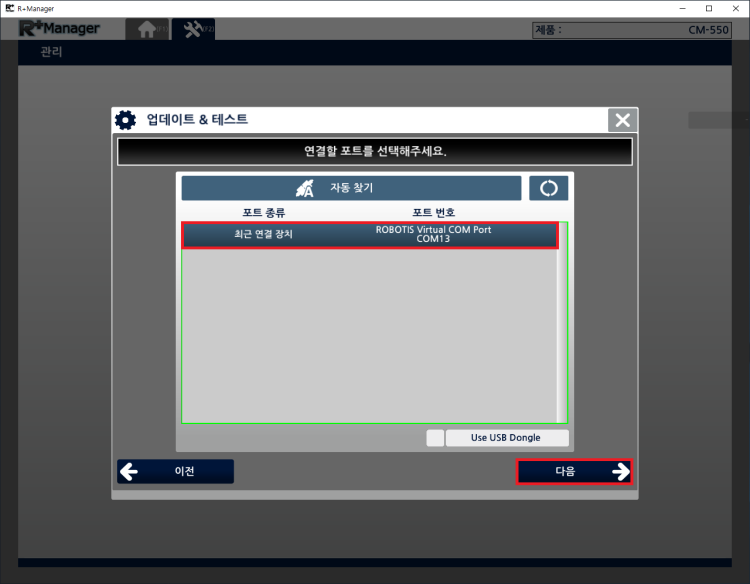
제어기가 연결된 포트를 선택합니다.
-
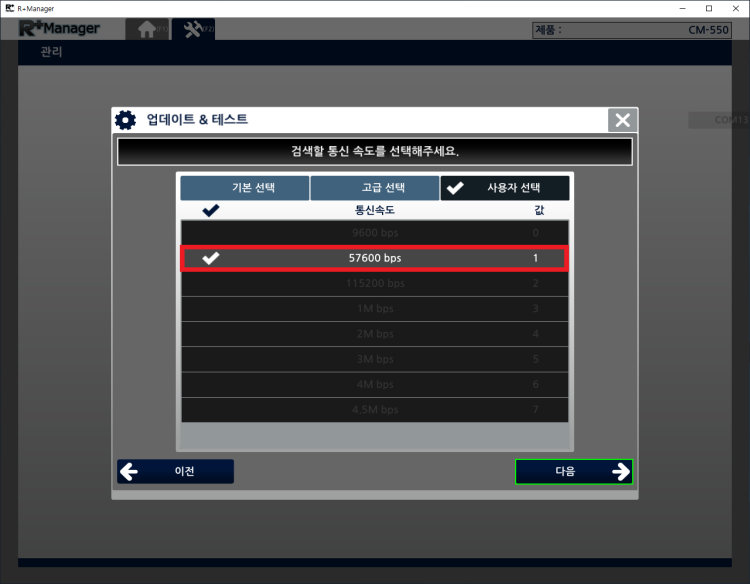
제어기와 PC의 통신속도를 선택합니다 (기본 통신속도는 57600 bps로 고정되어 있습니다).
-
제어기 검색이 완료되면
다음을 클릭합니다.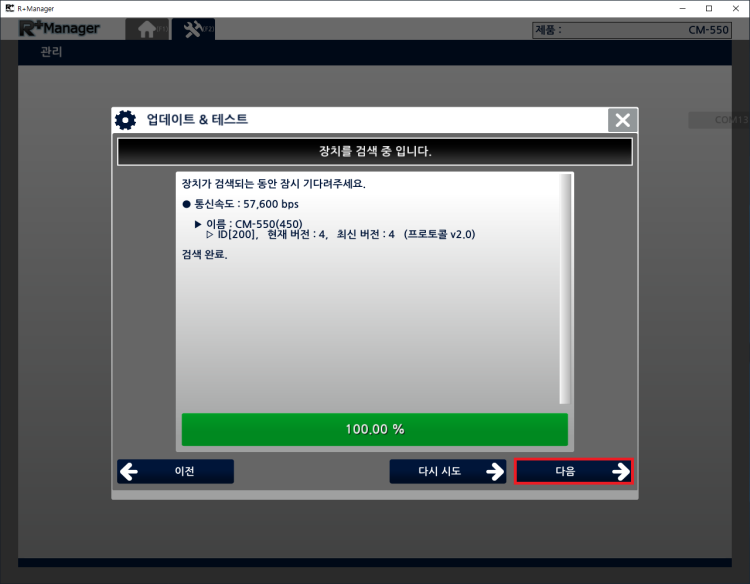
-
제어기와 연결된 부품의 펌웨어가 모두 최신 버전이라면
다음을 클릭하거나, 업데이트가 필요한 경우 화면의 안내에 따라 펌웨어 업데이트를 진행합니다.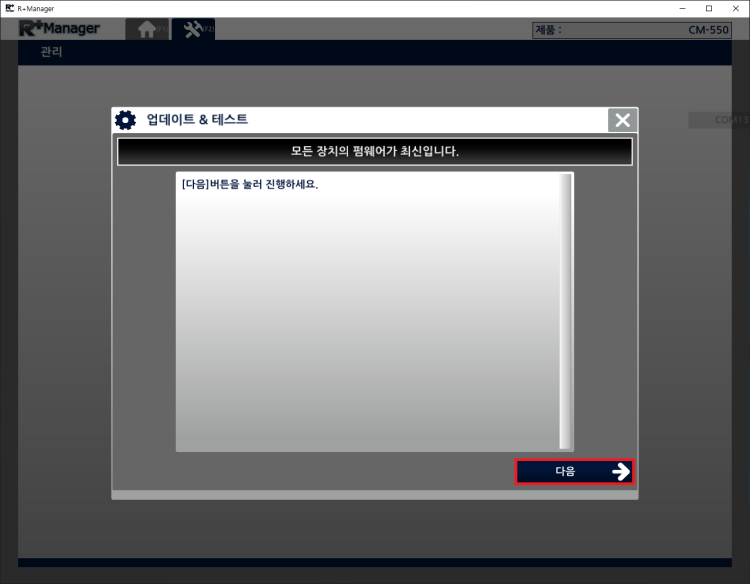
-
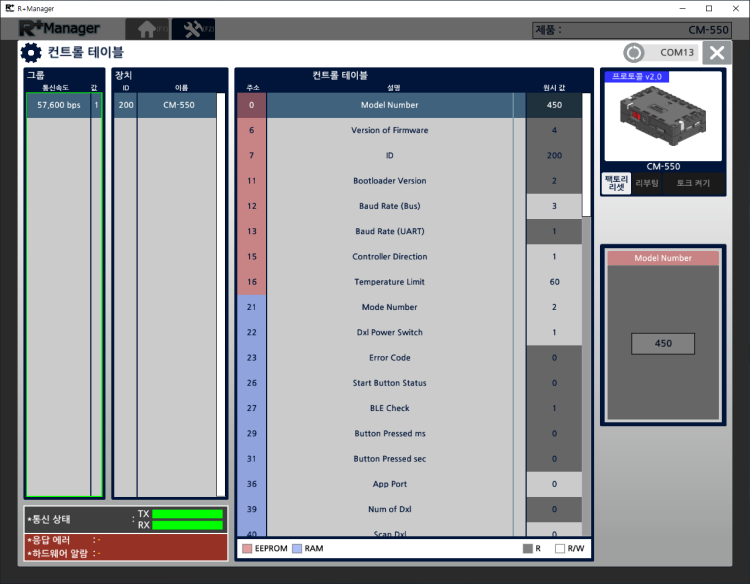
제어기와 PC가 성공적으로 연결이 되면, 아래 그림과 같이 컨트롤 테이블이 표시됩니다.
-
컨트롤 테이블을 스크롤해서
139번 주소의BLE Signal Power를 찾습니다.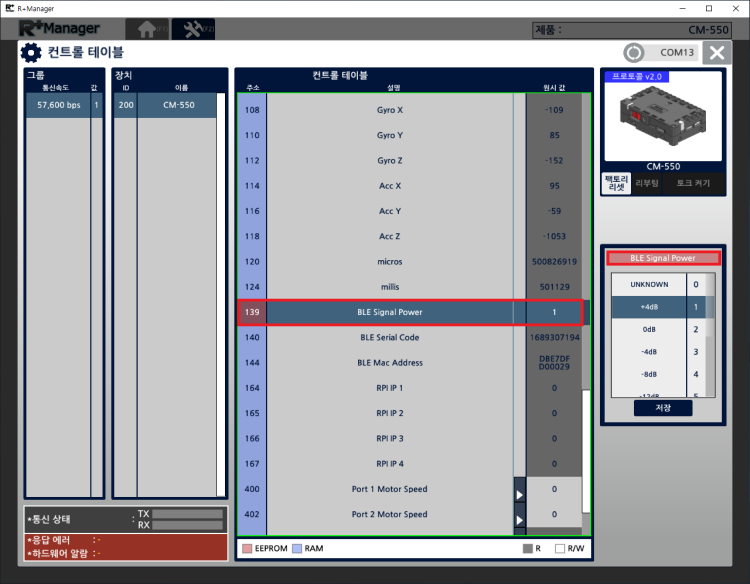
-
화면 오른쪽의
BLE Signal Power에서 값을 선택 후 저장합니다.
큰 값을 선택할수록 신호가 강해지며, 통신이 불안정할 경우 신호 세기를 높여주세요.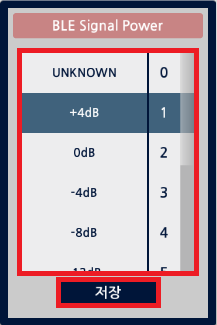
BLE Signal Power값이UNKNOWN(0)인 경우 1번 단계로 돌아가서 BT-410 마스터 또는 BT-410 동글의 전원이 꺼져있는지 확인하시기 바랍니다. -
마지막으로,
BLE Signal Power의 값이 저장되었는지 확인해주세요.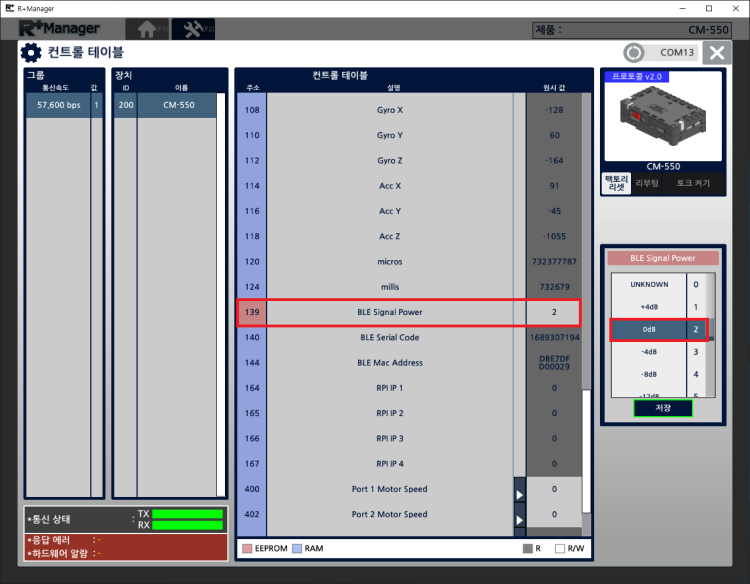
로봇 설정하기
모터 조립확인
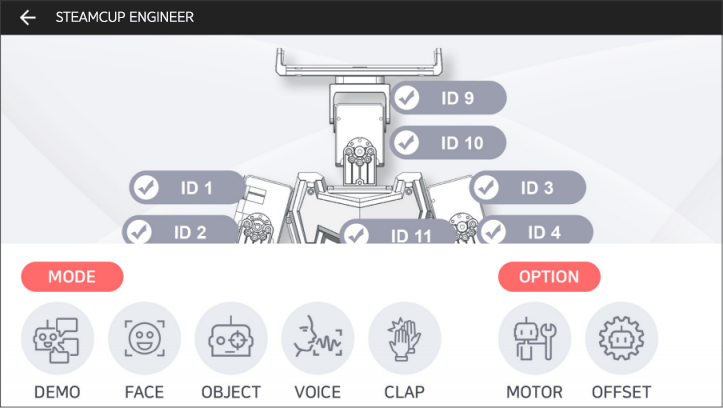
STEAMCUP ENGINEER에 사용된 다이나믹셀 ID 확인 및 작동 상태를 체크하는 기능입니다.
-
각 예제를 선택한 후 메뉴의 옵션에서
MOTOR를 선택하여 점검합니다
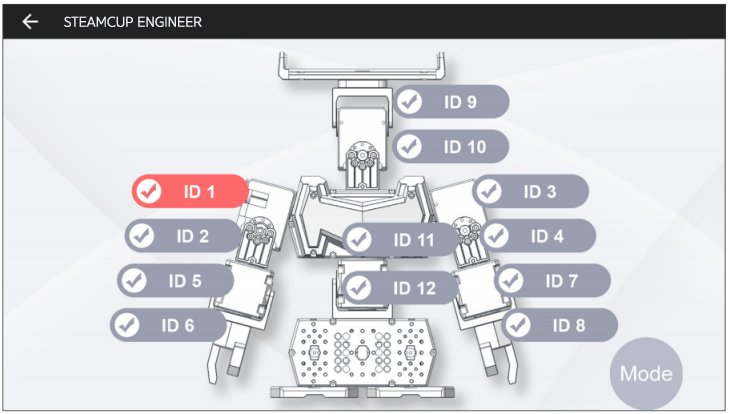
-
화면에서 ID 번호를 선택하면 선택된 ID의 LED가 켜지고 중심 위치에서 좌우로 조금씩 움직입니다.
모터 오프셋 설정
STEAMCUP ENGINEER에 사용된 다이나믹셀의 자세나 위치 값의 보정이 필요할 때 사용하는 기능입니다.
오프셋 기능을 통해 보정된 값은 로봇의 전원을 끄더라도 저장됩니다.
오프셋 기능을 숙지한 상태에서 미세하게 조정해야 하며 잘못된 값을 사용시 예제 동작이 잘 안되거나 로봇이 파손될 수 있습니다.
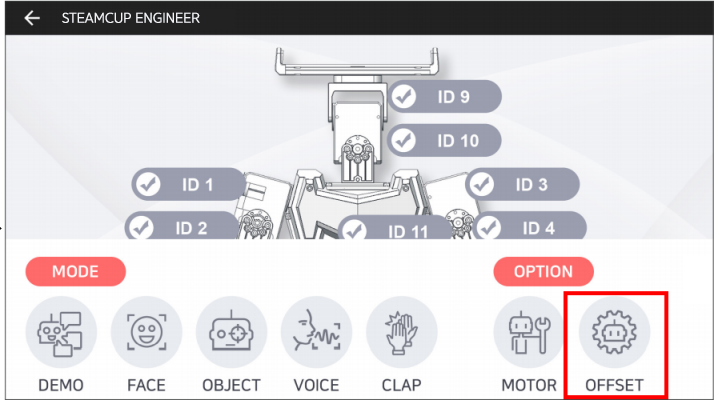
-
각 예제를 선택한 후 메뉴의 옵션에서
OFFSET을 선택합니다.
-
오프셋 값을 보정하려는 ID를 선택하면 아래와 같은 팝업창이 나타납니다.
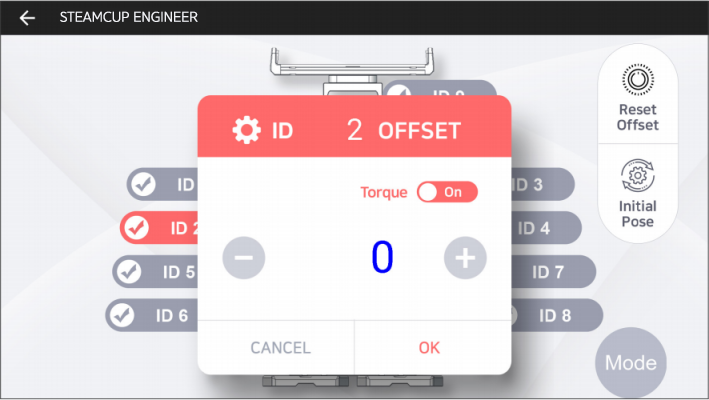
+ / -: ID 값을 증가시키거나 감소시킴Torque On / Off: 다이나믹셀의 토크를 켜거나 끄기OK / CANCEL: 오프셋 조정 값을 저장하거나 취소하기
-
OK를 눌러 저장하면 아래와 같은 확인 창이 나타납니다. 한 번 더OK를 누르면 값이 저장되고 로봇에 반영됩니다.

-
오프셋을 초기화 하거나 저장된 값을 불러오는 기능을 사용할 수 있습니다.
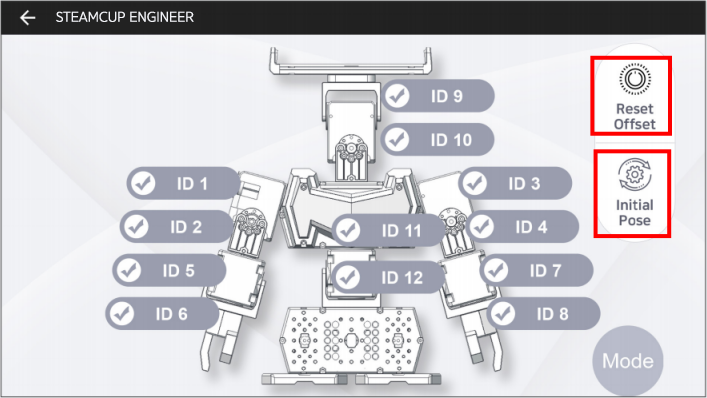
Reset Offset: 선택시 팝업창이 나타나며OK를 클릭하면 모든 ID의 오프셋을0으로 초기화 합니다.Initial Pose: 최근에 저장된 오프셋 값을 불러오는 명령입니다. 관절을 잘못된 값으로 조정하였을 경우 저장된 값을 불러옵니다.
점검 및 자가진단
- 로봇의 전원이 켜지지 않아요.
충전지의 연결 및 충전상태를 점검해 보세요.
- 충전지 잔량을 확인하고 싶어요.
충전지 잔량 확인 하기를 참조하세요.
- 로봇이 작동 중에 경고음이 들려요.
충전지의 잔량이 부족해서 나는 경고음입니다. 배터리를 충전해 주세요.
- 로봇이 정상적으로 작동하지 않아요.
로봇의 조립 방법 및 다이나믹셀 ID를 확인해 보세요.
- 어댑터로는 동작하는데 충전지로 동작하지 않아요.
제어기의 퓨즈 상태를 확인하고 필요시 교체합니다. 퓨즈 교체하기를 참고하세요.
제어기 및 다이나믹셀 초기화 방법
예제 코드에는 컨트롤러와 다이나믹셀을 각 예제 로봇에 맞게 자동으로 설정하도록 되어 있습니다. 자신만의 로봇을 만들 경우 설정이 해당로봇과 달라 정상 작동하지 않을 수 있습니다.
- 예제 다운로드 하기에서, 예제를 다운로드 받으세요. PC에서 예제 다운로드 받기로 간편하게 다운로드 받을수 있습니다.
배터리 충전하기
주의
- 반드시 제공된 충전기와 충전지(리튬폴리머 충전지)만 사용하십시오.
- 반드시 충전기에 전원을 연결한 다음 충전지를 연결해 주세요.
- 충전지를 처음 사용시 반드시 완전히 충전 후 사용해 주세요.
-
제품에 포함되어 있는 충전지(리튬폴리머 충전지)를 준비합니다.

-
그림과 같이 충전지를 충전기와 연결합니다.

-
그림과 같이 빨간색 LED가 표시되면 충전 중인 상태이며, 녹색 LED가 표시되면 충전이 완료된 상태입니다.

-
SMPS를 제어기에 직접 연결하면 충전지 없이 외부전원으로 로봇을 구동할 수 있습니다.

-
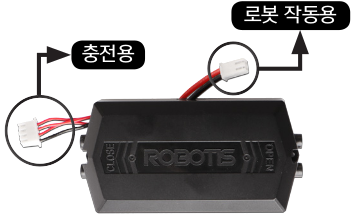
충전지는 충전용 커넥터와 로봇 작동용 커넥터가 연결되어 있습니다. 충전지를 충전할 때에는 반드시
로봇 작동용커넥터를 분리해 주세요.
충전지 잔량 확인하기
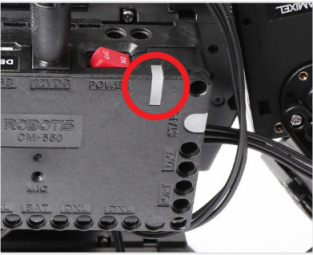
충전지 잔량에 따라 CM-550의 전원 LED가 다음과 같은 색상으로 표시됩니다.
- 파란색 : 70% 이상
- 녹 색 : 30% ~ 70%
- 빨간색 : 30% 이하(저전압 경고음이 발생합니다.)
참고 : 제어기의 블루투스 장치가 연결되지 않았을 때에는 전원 LED가 깜빡거립니다. 따라서, 전원 LED의 깜빡거림은 충전지 잔량과는 관계가 없습니다.
주의 : 충전이 완료되면 반드시 충전기와 충전지를 분리하여 보관해주시고, 충전중인 충전지를 사용해서 로봇을 구동하지 않도록 주의하세요.
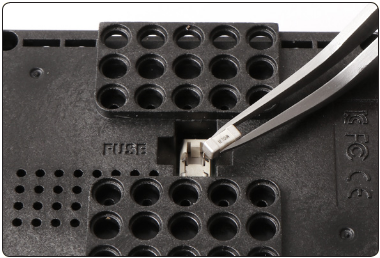
퓨즈 교체하기
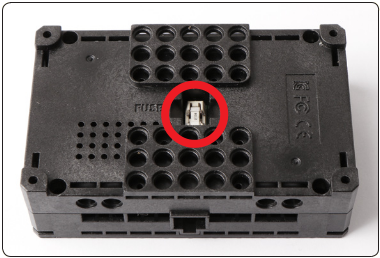
CM-550에는 과전류가 흘러서 회로가 망가지는 것을 방지하기 위한 퓨즈(Fuse)가 있습니다.
만약 CM-550이 충전지로는 전원이 켜지지 않고, SMPS로만 전원이 켜진다면 퓨즈가 끊어진 것이니 교체해 주어야 합니다.
경고 : 반드시 어댑터와 충전지를 연결하지 않은 상태로 퓨즈를 교체해야 합니다.
제어기와 연결된 전원을 모두 분리하고 제어기 바닥면의 퓨즈를 핀셋으로 꺼낸 다음 새 퓨즈로 교체합니다.
도면
STEAMCUP ENGINEER 키트 2에 프레임 및 추가 3D 모델링 파일을 다운로드 받을수 있습니다. 파일 정보 (파츠 명칭, 이미지등)를 확인하기 위해서, 다음 PDF파일을 다운로드하세요.
- ENG2_3D_Printing_Parts_List 다운로드 하기.
참고: 3D 모델링 파일을 출력 시, 기체의 무게 감소를 위해 내부 채움 밀도 비율을 10% 이하로 설정하기를 권장 합니다.
| 모델 | STL 파일 다운로드 (.zip ) |
|---|---|
| 부품 리스트 | ENG2_3D_Printing_Parts_List |
| MAX-E2 | 1. MAX-E2_STL.zip |
| Commando | 2. COMMANDO_STL.zip |
| Scorpi | 3. SCORPI_STL.zip |
| AutoBot (추가 예제) | 4. AUTOBOT_STL.zip |
| Strider (추가 예제) | 5. STRIDER_STL.zip |
더 많은 2D/3D 도면자료와 각종 소프트웨어 등 유용한 자료는 로보티즈 다운로드 센터에서 제공됩니다.