
개요

STEAMCUP ENGINEER 는 스마트 기기를 활용한 AI 기술이 적용된 새로운 개념의 차세대 로봇입니다.
- 다양한 움직임을 구현하는 관절형 구조
- 단계별 로봇교육과정 및 표준 커리큘럼 제공
- 3D프린팅 지원
- 로보플러스 엔지니어, R+ Task 3.0 등 다용도 소프트웨어 사용가능
- 라즈베리 파이와 카메라 확장가능.
- 3개의 기본 예제(
MAX-E2,Commando,Scorpi)와 추가 예제 및 추가 교육자료 제공.
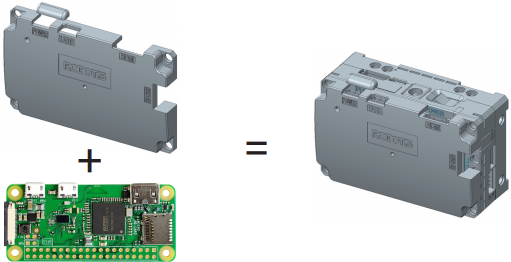
주의 엔지니어 키트2 는 엔지니어 키트 1의 확장 버전입니다. 키트 2를 사용하기 위해서는, 엔지니어 키트 1에 포함된 부품들이 필요합니다.
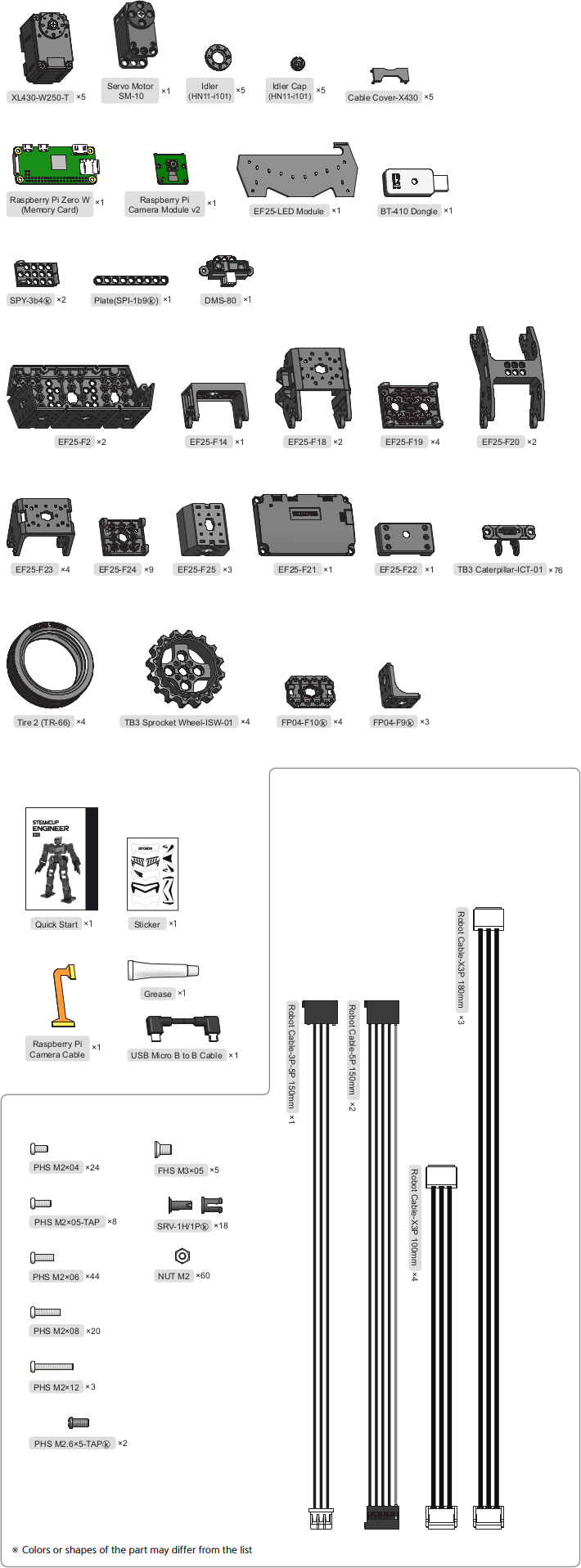
부품 목록
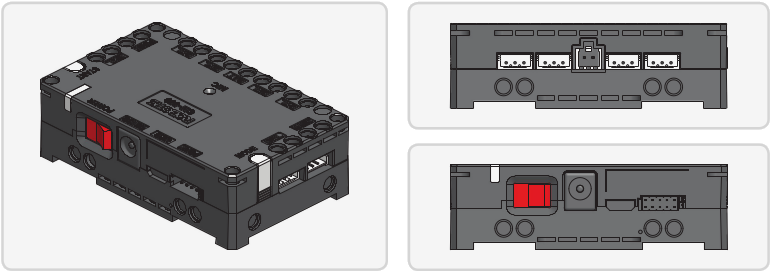
CM-550 제어기
제품 사양
| 항목 | 사양 |
|---|---|
| 무게 | 58.8 [g] |
| MCU | ARM Cortex-M4 (168 [MHz], 32 [Bit]) |
| 동작 전압 | 충전지 : 허용범위 6.5 ~ 15 [V], 권장 전압 11.1 [V] (Li-PO 3cell) SMPS : 허용범위 6.5 ~ 15 [V], 권장 전압 12.0 [V] Micro USB : 허용범위 4.75 ~ 5.25 [V], 권장 전압 5.0 [V] |
| 소모 전류량 | 대기시 : 50 [mA] 포트 1 ~ 2 I/O 최대전류 : 0.5 [A] 포트 3 ~ 5 I/O 최대전류 : 0.02 [A] 전체 최대 전류 : 10 [A] (Fuse) |
| 동작 온도 | -5 ~ 70 [°C] |
| 통신 모듈 | BLE Slave 모듈 내장 |
| 내부 I/O 장치 | 버튼 : 2 (MODE, START) 마이크 (소리 감지) : 1 부저 : 1 전압 센서 : 1 자이로 가속도 센서 : 1 온도 센서 : 1 RGB LED : 3 |
| 외부 I/O 장치 | 로보티즈 5핀 포트 : 5 (서보모터/IR센서/온습도센서 : 1, 2번 포트 사용) X 시리즈 다이나믹셀 포트 : 6 |
CM-550 각 부 명칭
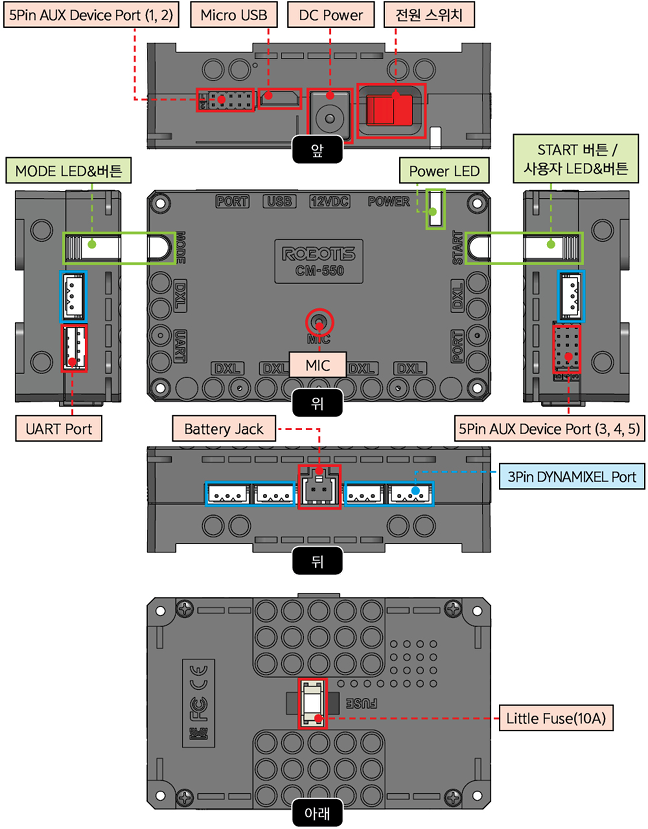
USB마이크로 USB 포트 : 마이크로 USB 케이블로 CM-550를 PC의 USB 포트와 연결할 수 있습니다.UART외부통신 포트 : BT-210, BT-410, LN-101, 적외선 수신기 등의 무선 통신용 모듈이나 외부 장치와의 통신용으로 사용되는 포트입니다.BAT배터리 소켓 : 배터리를 연결하는 소켓입니다.12VDC전원잭 : 전원 공급기(SMPS)의 전원잭을 연결하는 소켓입니다.POWER전원 스위치 : 제어기의 전원을 켜거나 끌 때 사용하는 스위치입니다.상태 LED: 전원과 무선기기의 상태에 따라 다양한 색상과 표현으로 알려주는 RGB LED입니다.MODEMODE LED : CM-550의 동작 모드를 표시하는 RGB LED입니다. CM-550의 동작 모드 설명을 참고하세요.STARTSTART LED : CM-550의 동작 모드 설명을 참고하세요.MODEMODE 버튼 : 제어기의 동작 모드를 변경하기 위한 버튼입니다. CM-550의 동작 모드 설명을 참고하세요.STARTSTART 버튼 : 현재 선택된 모드를 실행하기 위한 버튼입니다. CM-550의 동작 모드 설명을 참고하세요.DXL다이나믹셀 X 시리즈 포트 : 다이나믹셀 X 시리즈를 연결하기 위한 포트입니다.PORT로보티즈 5핀 포트 : DMS-80, 접촉 센서, 적외선 센서 등의 주변장치를 연결하기 위한 5개의 포트입니다.
그 중 서보모터, 적외선센서, 온습도센서는 1, 2번 포트에만 연결할 수 있습니다. 각 포트마다 번호가 표시되어 있습니다.MIC내장 마이크 : 박수 소리를 감지할 수 있는 마이크가 기본으로 내장되어 있습니다.FUSE퓨즈 : 10A 퓨즈가 내장되어 있습니다.
주의 : CM-550 제어기의 USB 포트는 PC와의 통신용이므로 스마트 기기나 다른 장치와 연결하지 마세요. 제어기 고장의 원인이 될 수 있습니다.
Raspberry Pi
Raspberry Pi는 영국의 라즈베리 파이 재단이 교육 목적으로 개발한 리눅스 운영체제 기반의 싱글보드 컴퓨터입니다.
Raspberry Pi Zero W
키트2에서 사용되는 Raspberry Pi Zero는 기존 라즈베리파이의 기능을 유지하면서 크기와 간격을 줄인 초소형 컴퓨터입니다.
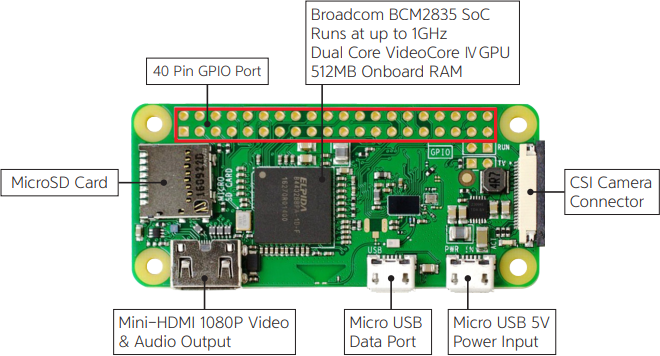
포트 및 기능
40 Pin GPIO Port: 입출력을 담당하는 GPIO(General Purpose Input/Output) 헤더핀입니다. 센서등 외부장치와 통신 및 제어시 사용합니다.Broadcom BCM2835: 라즈베리 파이에서 사용되는 프로세서입니다.CSI Camera Connector: 라즈베리파이 카메라 모듈을 연결할수있는 커넥터입니다.Micro USB 5V Power Input: 5 V 전원공급 포트입니다.Micro USB Data Port: USB 허브와 연결하여, 주변장치 (마우스,키보드등)을 사용할수 있는 포트입니다.Mini-HDMI 1080P Video & Audio Output: 모니터 및 오디오 출력을 위한 Mini HDMI 커넥터 입니다.MicroSD Card: 제공된 이미지 파일 설치 시, 사용하는 마이크로 카드 슬롯입니다.
Raspberry Pi 카메라
라즈베리파이 카메라는 라즈베리파이와 연결하여 얼굴 및 색상 인식, 라인 감지, 영상 스트리밍 등의 다양한 기능을 수행할 수 있습니다.

라즈베리 파이 카메라 모듈
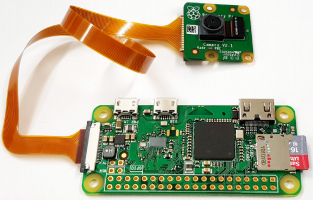
라즈베리파이와 카메라모듈 연결모습
CM-550에 장착하기
다음과 같은 모습으로, 제어기(CM-550)에 장착 시켜주세요.
참고: 부팅시 60초가 소요됩니다. 부팅이 되면 소리가 나면서 LED가 노랑색으로 변경됩니다.
다이나믹셀
XL430-W250-T
XL430-W250-T는 로봇의 기본관절로 사용되는 액츄에이터입니다.

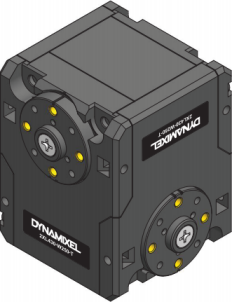
2XL430-W250-T
2XL430-W250-T는 기존 하나의 축만 가지고있는 액츄에이터와 달리, 2축 제어가 가능한 새로운 다이나믹셀입니다.
LED 보드
빨강, 파랑, 보라 3가지 색과 빛의 세기를 제어할 수 있는 R/B LED 보드입니다.
로봇의 외형에 장착해 화려한 LED 효과를 주거나 대회 등에서 LED 색으로 팀을 구분하는 등의 다양한 용도로 활용할 수 있습니다.

LED 보드
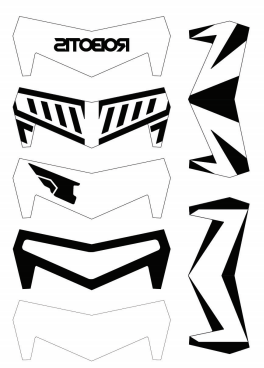
LED 보드 부착용 스티커
MAX-E2 LED 보드 장착모습
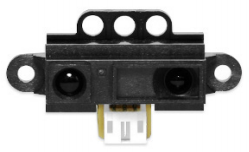
DMS-80
절대 거리 센서 DMS-80 (DMS : Distance measuring Sensor)은 적외선을 활용해 거리를 감지하는 센서입니다.
일반적인 적외선 센서에 비해 DMS는 반사체의 색상에 거의 영향을 받지 않으며 감지 거리도 10 ~ 80 cm까지 측정이 가능합니다.
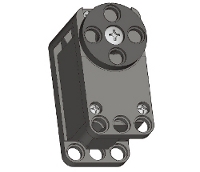
서보모터
서보모터는 로봇의 관절과 같이 각도 조절이 필요한 곳에 주로 사용되는 모터입니다.
바퀴처럼 구동시키는 회전 모드와 각도 및 위치 조절이 가능한 관절 모드를 지원하며 모드를 변경하여 필요에 맞게 사용할 수 있습니다.
주의사항
안전에 대한 주의사항
![]()
- 사용 전 본 매뉴얼을 충분히 숙지하시기 바랍니다.
- 반드시 권장 공구를 사용해야 하며 칼이나 드릴과 같이 위험한 공구를 함부로 사용하지 마십시오.
- 로봇이 동작할 때는 다칠 위험이 있으니 절대로 만지거나 얼굴을 가까이 가져가지 마십시오.
- 손가락이 로봇의 관절 사이에 끼이지 않도록 유의하십시오.
- 직사광선이 닿는 곳이나 고온 상태에서 로봇을 보관하거나 작동하지 마십시오.
- 물기가 있는 곳에서 절대 작동시키지 마십시오.
- 부품을 임의로 분해하거나 개조하여 사용하지 마십시오.
- 로봇이나 부품이 유아나 어린이의 손에 닿지 않도록 유의하십시오.
- 로봇이나 부품에 충격을 가하거나 날카로운 물체로 찌르지 마십시오.
사용상 주의사항
- 나사를 조이는 드라이버는 반드시 지정된 사양의 드라이버(PH 1)를 사용하십시오.
- 무리한 힘으로 나사를 돌리거나 부품을 끼우지 마십시오.
- 책상이나 테이블 위에서 로봇을 동작시키면 떨어져 파손될 위험이 있으므로 반드시 바닥에서 동작시키십시오.
- 낙하에 의한 파손은 본인의 부주의로 인한 것이므로 고장시 무상 수리되지 않습니다.
- 로봇 관절 및 다이나믹셀 내부의 기어는 소모품입니다. 오래 사용하거나 무리하게 사용하면 기어의 유격이 커질 수 있습니다.
- 순간 전류를 많이 소모하는 과격한 동작시, 전원이 꺼지는 현상이 발생할 수 있습니다. 이 경우 배터리 또는 높은 암페어(A)의 SMPS를 사용하세요.
충전기/충전지 사용시 주의사항
![]()
- 충전지는 로봇의 제어기로 충전되지 않으며, 반드시 제품에 포함된 전용충전기를 사용하여 충전해야 합니다.
- 충전기나 충전지를 분해 또는 떨어뜨리거나 충격을 가하지 마십시오.
- 충전지에 열을 가하거나 불, 물, 또는 기타 액체류에 접촉하지 마십시오.
- 전자레인지, 냉장고, 세탁기, 또는 세탁물 건조기에 충전지를 넣지 마십시오.
- 손상된 충전지를 사용하지 마십시오. (부풀어 오른 것, 변형된 것, 외관이 손상된 것 등)
- 충전지의 양극과 음극을 단락시키지 마십시오.
- 충전지를 충전하기 전에 올바른 극에 연결되었는지 확인하고 충전하십시오.
- 충전지가 뜨거워진 상태에서 충전하지 마십시오. 충전지가 상온의 온도일 때 충전하십시오.
- 온도나 습도가 높은 곳에 보관하지 마십시오.
- 충전기에 여러개의 충전지를 동시에 연결하지 마십시오.
- 충전기에 전원을 연결하지 않은 상태에서 배터리만 연결하지 마십시오.
조립시 주의사항
다이나믹셀 조립
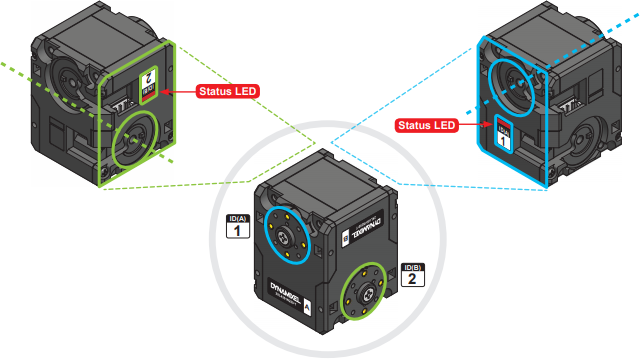
- 2축 다이나믹셀을 제어하기 위해 각 축마다 중복되지 않는 고유의 ID가 부여되어 있습니다.
- 혼의 맞은편 ID, 상태 LED로 다이나믹셀의 상태를 확인할 수 있습니다
- STEAMCUP ENGINEER에서는 주요 관절 부위의 견고한 조립을 위해 나사를 사용합니다.
(표시된 부분이 나사를 조립하는 부분입니다)
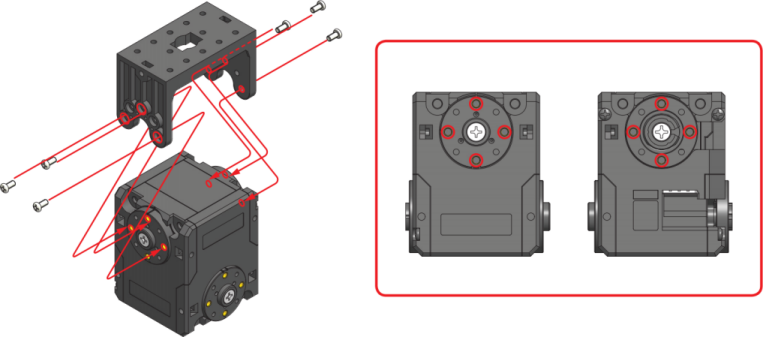
주의 : 나사를 조이거나 풀 때 반드시 지정된 사양(PH 1)의 드라이버를 사용하시기 바랍니다.
다이나믹셀 ID확인
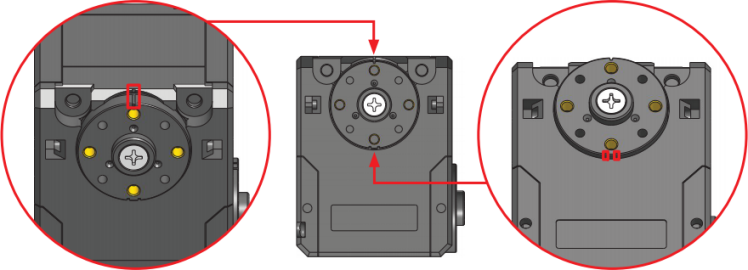
다이나믹셀 혼 위치 확인
주의
- 케이스 중앙의 표식과 혼의 표식이 일치한 상태가 중앙 값입니다.
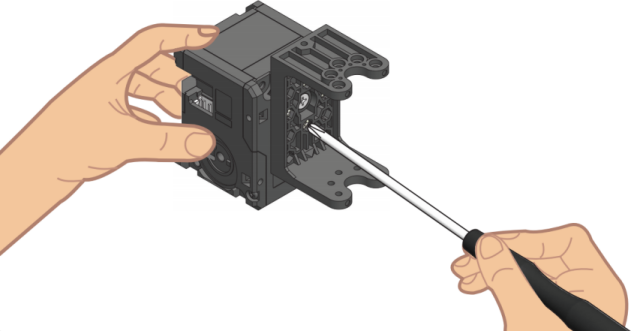
- 재조립 등으로 인하여 다이나믹셀 혼 위치가 변경되었을 경우 드라이버를 이용하여 혼 중앙의 나사를 시계방향으로 천천히 돌리면 혼이 회전합니다. 나사를 반시계 방향으로 돌리면 나사가 풀어지므로 주의해주세요.
리벳 조립
6mm 리벳
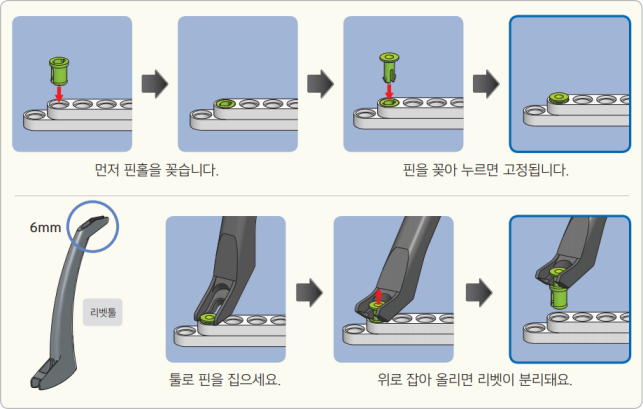
주의 : 리벳을 다시 사용할 때는 반드시 핀홀을 먼저 끼웁니다. (사용했던 리벳은 핀과 핀홀로 분리되지 않습니다.)
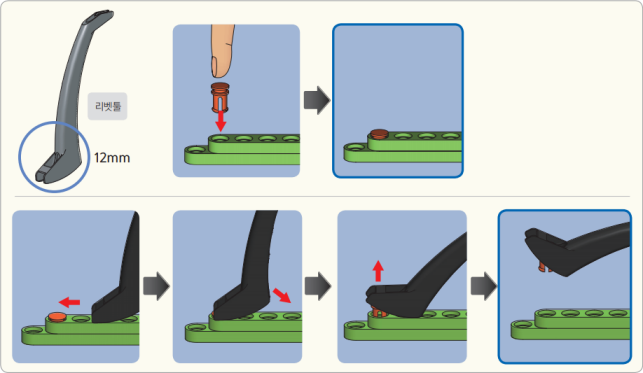
12mm 리벳
케이블 연결
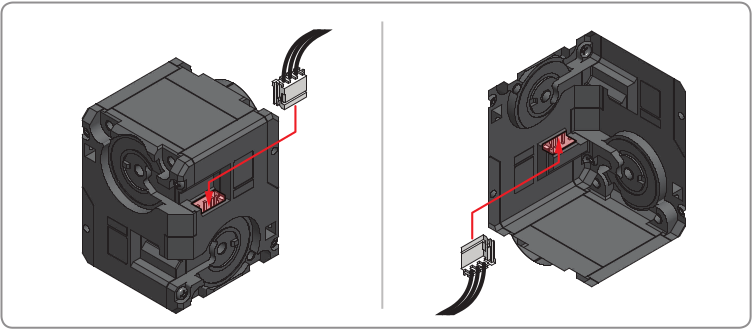
배선연결
두 개의 커넥터 중 한 개만 연결해도 전원 공급이 되며 통신이 가능합니다. 로봇의 배선에 유리한 커넥터를 사용하세요.
아이들러 캡을 통한 중공형 배선
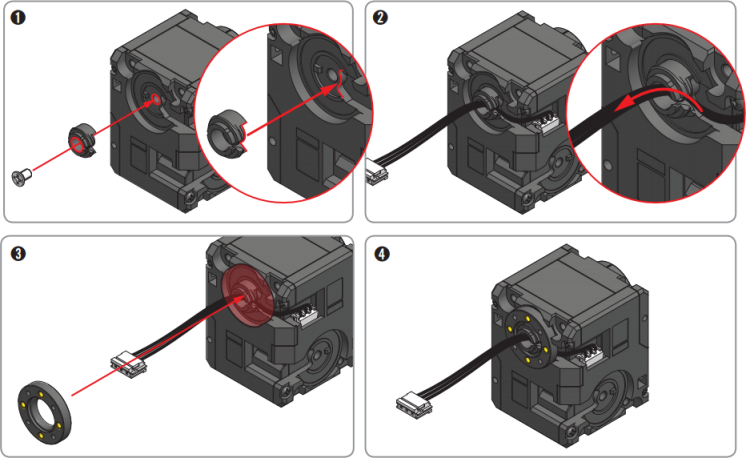
참고
중공형 배선 연결은 케이블의 내구성을 더 높이거나 미관상의 케이블 정리를 위해 사용하는 결합 방법입니다.
반드시 사용해야 하는 것은 아니며 아이들러 캡 결합 후 케이블을 교체시 일반적인 조립방법보다 시간이 더 소요될 수도 있습니다.