
개요
임베디드 C는 사용자가 직접 제어기 펌웨어를 개발할 수 있는 솔루션입니다. 임베디드 C는 다음과 같은 특징이 있습니다.
- 모든 소스가 C언어로 작성되어 있습니다.
- 제어기 각 부분을 직접 제어하는 예제를 제공합니다.
참고: 임베디드 C를 사용하려면 하드웨어 및 소프트웨어에 대한 전문적인 지식이 필요합니다. 초보자의 경우 전문 지식을 별도로 습득한 후, 사용하는 것을 권장합니다.
참고: 임베디드 C를 사용하게 되면 제어기 펌웨어가 바뀌어서 로보플러스를 사용할 수 없게됩니다. 다시 로보플러스를 사용하기 위해서는 로보플러스 매니저로 펌웨어 복구를 시도해야 합니다.
CM-530
다운로드CM-530 SDK
폴더 구조
..: stm32f10x_conf.h, Makefile, stm32.ld 세 파일 및 하기 폴더들이 있습니다.../stm32f10x_lib: 라이브러리 파일이 있습니다.../APP/inc: 라이브러리외 예제완성에 필요한 헤더파일이 있습니다.../APP/src: 라이브러리외 예제완성에 필요한 소스파일이 있습니다.
시작하기
주의: Windows 8.1, 10 사용 시, 설치도중 다음과 같은 오류가 발생 할 수 있습니다.
- EX error :/usr/bin/sh: fork: Resource temporarily unavailable
- make: *** [CM530.lss] Error 128
해결을 위해서, 다음 절차를 참고 하세요.
- 첨부된 압축 파일을 다운로드 하세요. - 파일 다운로드
- 다운로드 받은 압축 파일을 압축해제 하세요.
- 압축해제한 파일을 복사하세요.
- C:\WinARM\utils\bin 경로로 이동하세요.
- 복사한 파일을 붙여넣어, 기존 파일에 덮어 씌우세요.
JRE 설치
JRE (Java Runtime Enviroment)는 Eclipse 구동을 위해서 필요한 프로그램입니다.
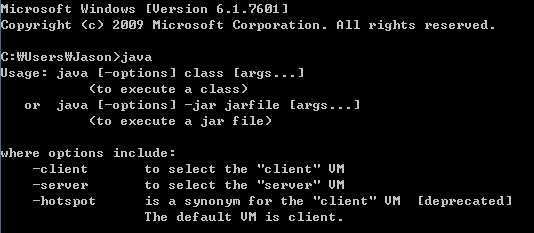
만약 이미 JRE가 설치되어 있는지 확인 하시려면, 실행 창에서 “java”를 입력하였을 때 다음과 같은 정보가 나온다면 JRE 설치는 넘기셔도 됩니다.
JRE는 다음 사이트에서 다운로드 받을 수 있습니다.
http://www.oracle.com/technetwork/java/javase/downloads/index.html
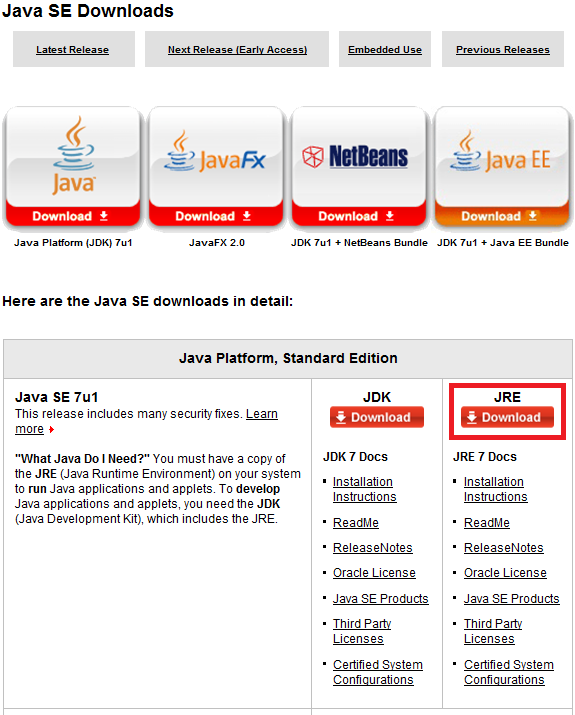
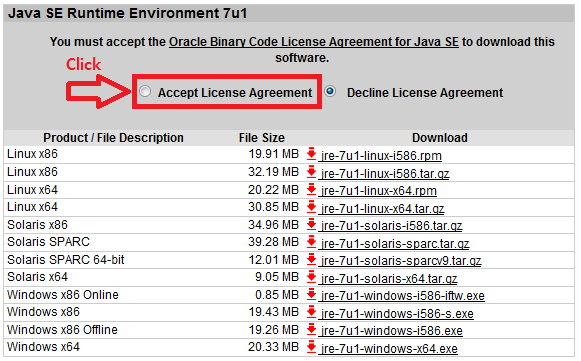
사용하시는 환경에 맞는 버전을 선택하여 설치해 주시기 바랍니다.
WinARM 설치
WinARM은 아래 링크에서 다운로드 받을 수 있습니다.
다운로드 WinARM
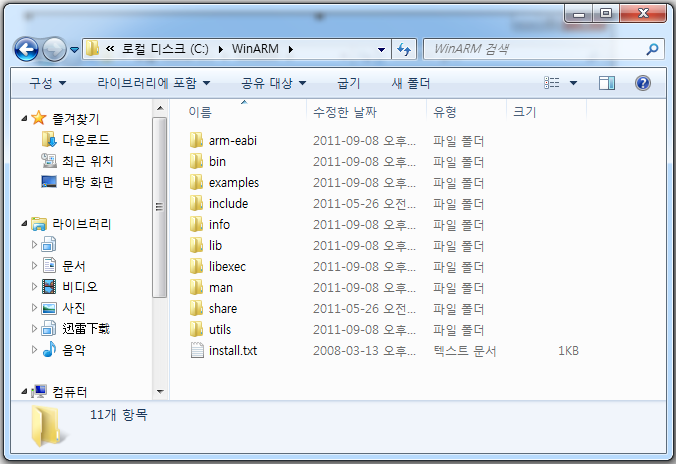
다운로드된 파일은 압축 파일입니다. C:\WinARM 에 압축을 풀어 주시면 됩니다.
WinARM이 제대로 동작하려면, 환경변수를 등록해야 합니다.
제어판 - 시스템 - 고급 탭에서 ‘환경 변수’ 버튼을 누릅니다.
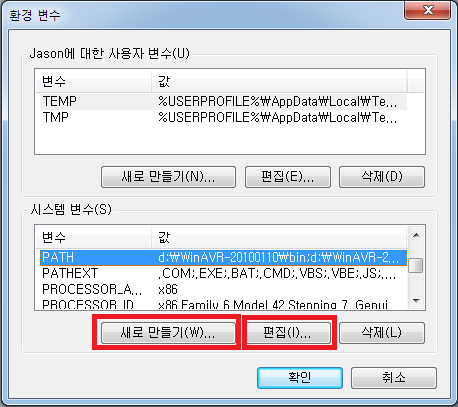
시스템 변수에 “PATH”라는 변수가 이미 존재한다면 ‘편집’ 버튼을, “PATH“라는 변수가 존재하지 않는다면 ‘새로 만들기’ 버튼을 누릅니다.
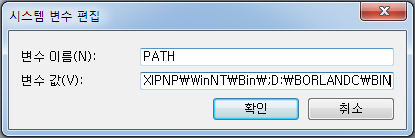
시스템 변수 편집 창에서 변수 값에 아래 항목을 추가합니다.
새로 만들기가 아니라 편집하는 경우, 기존 문구 맨 마지막에 “;” 가 없으면 “;” 를 추가한 다음 아래 문구를 추가합니다.
C:\WinARM\bin;C:\WinARM\utils\bin;
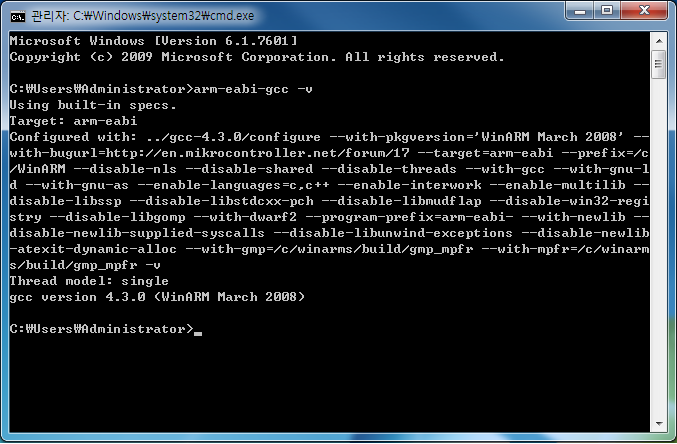
WinARM이 제대로 설치되었는지 확인하려면, 실행 창에서 ‘arm-eabi-gcc -v’를 입력하여 보시기 바랍니다.
잘 안 되는 경우 cmd창을 끄고 재실행하고 다시 시도해보시기 바랍니다.
Eclipse 설치
Eclipse는 다음 사이트에서 다운로드 받을 수 있습니다.
다운로드 Eclipse
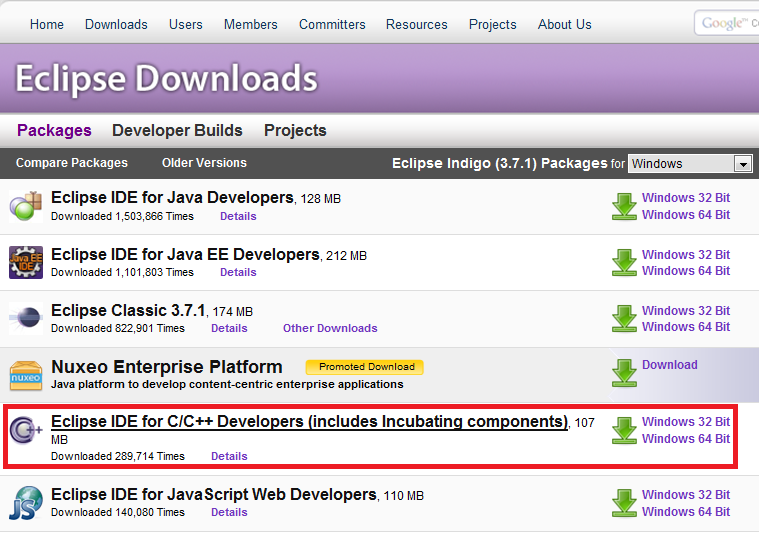
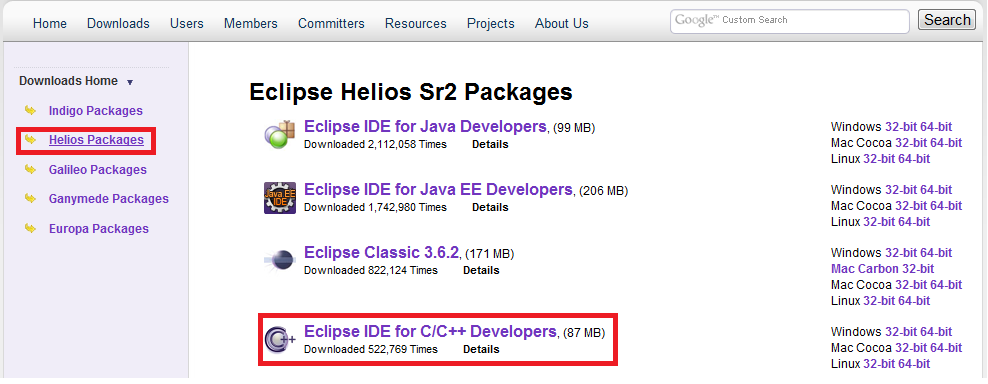
Helios packages중 Eclipse IDE for C/C++ Developers 를 다운로드 하시되 사용하시는 환경에 맞는 버전을 선택하여 다운로드 받습니다.
Eclipse는 따로 설치 과정이 필요 없이 압축을 푸신 후 바로 eclipse.exe를 실행하시면 됩니다.
link http://www.eclipse.org/downloads/packages/eclipse-ide-cc-developers/neonr
설치 성공여부 확인
함께 제공되는 예제 프로젝트를 열어 보겠습니다. 압축을 풀어주십시오. Root는 관계없습니다.
만약 Eclipse 실행 시 다음과 같은 창이 나오게 되면
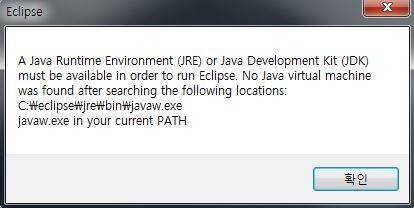
바로가기를 만들 후 바로가기의 속성에서 대상에 -vm “C:\Program Files\Java\jre7\bin\javaw.exe” 를 뒤에 추가시키면 됩니다.
폴더명에 공백이 있으면 “(겹따옴표)으로 감싸줘야 합니다.

Eclipse를 처음 실행시키면 아래 그림과 같이Workspace에 대한 설정을 요구합니다.
Default 경로 그대로 하면 project를 읽어 올 수 없는 문제가 생길 수 있기에 다른 경로로 변경하시기 바랍니다.
좌측 하단 박스를 클릭하시면 다음부터 이 창이 뜨지 않습니다.
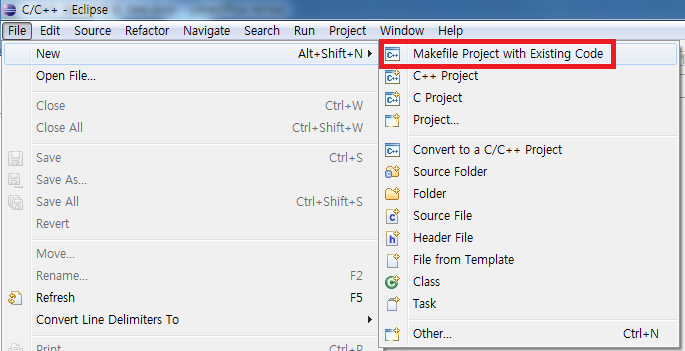
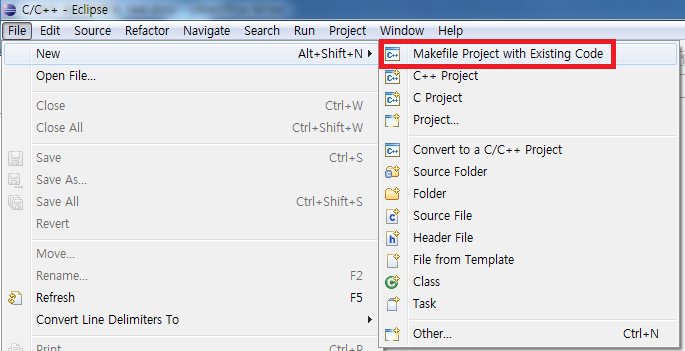
Eclipse를 실행시키고 ‘File – New – Makefile Project with Existing Code’를 선택합니다.
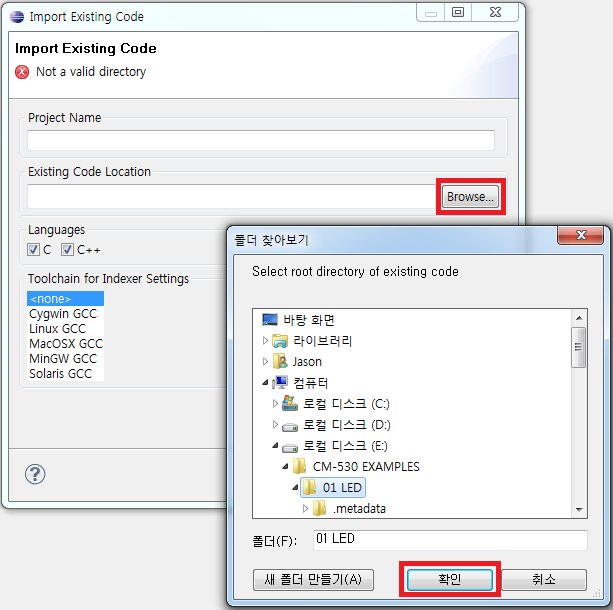
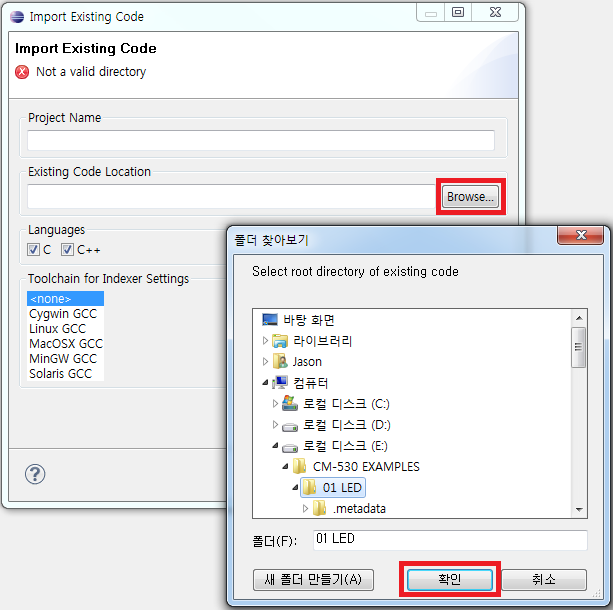
‘Browse..’ 버튼을 누르고, 압축을 풀어 놓은 폴더중 “01 LED”를 선택하고 “확인”을 눌러 완료합니다.
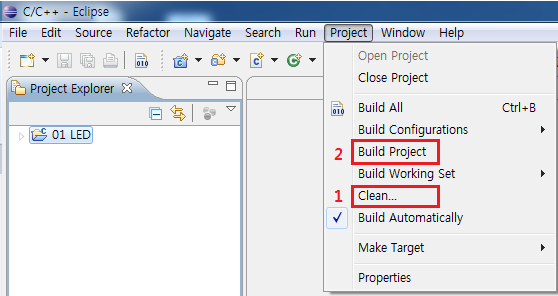
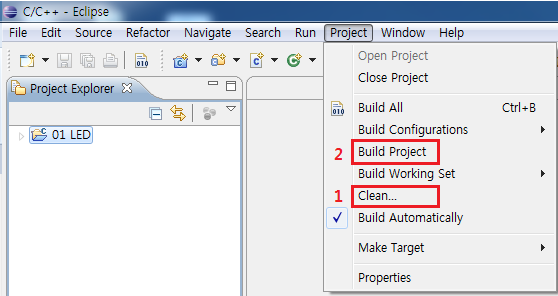
프로젝트 생성 후에는 ‘Project – Clean, Build’를 한 번씩 실행 해 주십시오.
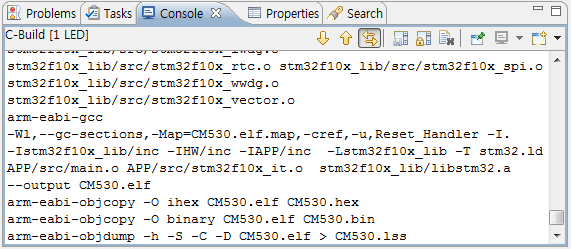
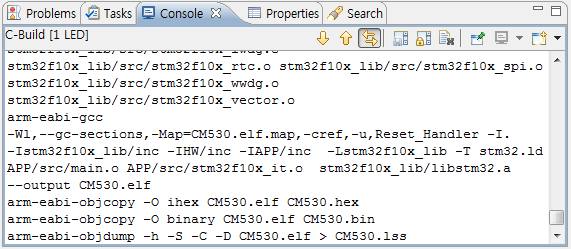
위와 같이 실행 후에, Console창에서 제대로 수행 되었는지 확인 할 수 있습니다.
아래와 다르게 제대로 실행되지 않았을 경우에는, 개발환경 설치를 다시 한번 확인해 주시기 바랍니다.
주의: Windows 8.1, 10 사용 시, 설치도중 다음과 같은 오류가 발생 할 수 있습니다.
- EX error :/usr/bin/sh: fork: Resource temporarily unavailable
- make: *** [CM530.lss] Error 128
해결을 위해서, 다음 절차를 참고 하세요.
- 첨부된 압축 파일을 다운로드 하세요. - 파일 다운로드
- 다운로드 받은 압축 파일을 압축해제 하세요.
- 압축해제한 파일을 복사하세요.
- C:\WinARM\utils\bin 경로로 이동하세요.
- 복사한 파일을 붙여넣어, 기존 파일에 덮어 씌우세요.
로보플러스 복구하기
임베디드 C로 만들어진 결과물은 제어기 펌웨어(bin 파일) 입니다. 이것을 설치하면 기존의 제어기 펌웨어가 지워져서 로보플러스를 사용할 수 없게됩니다. 만약, 로보플러스를 다시 사용하려면 공장 출하시 제어기 펌웨어를 설치해야 합니다. 로보플러스 매니저를 이용하면 공장 출하시 제어기 펌웨어를 쉽게 설치할 수 있습니다.
자세한 사항은 로보플러스 매니저의 펌웨어 복구하기를 참조하십시오.
프로그래밍
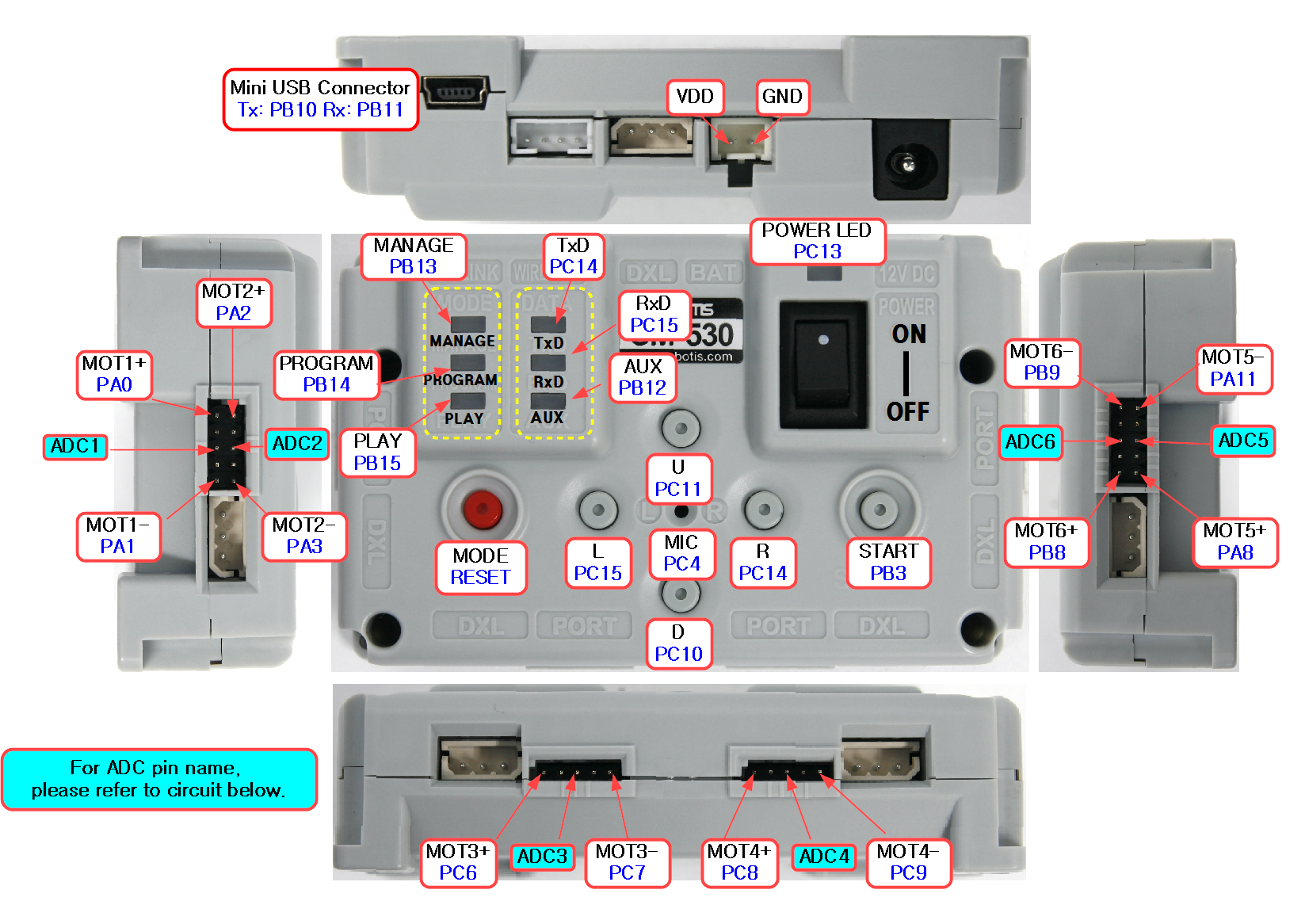
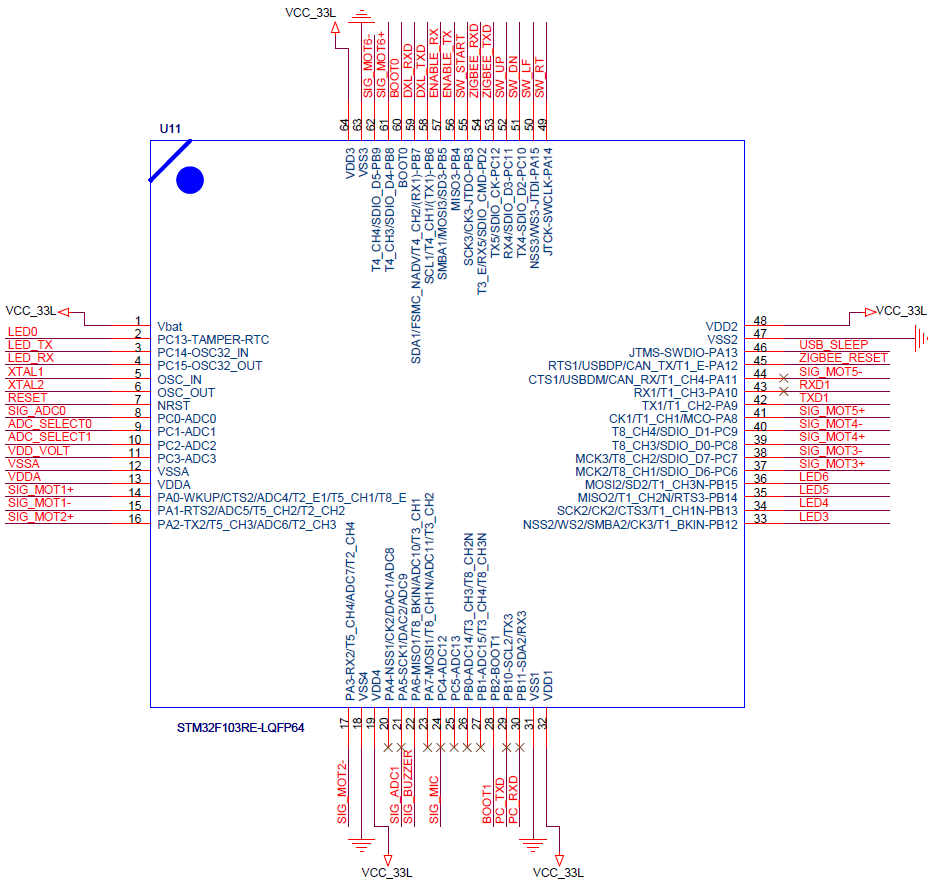
하드웨어 포트맵
다음은 제어기의 하드웨어 주요 핀 기능을 표현해 놓은 하드웨어 포트맵입니다.
각 포트나 내부 기능은 STM32F10X 라이브러리에서 제공하는 매크로 함수를 통해 간단히 접근하여 제어할 수 있습니다.
CM-530
| 핀 번호 | 핀 이름 | NET NAME | 기능설명 |
|---|---|---|---|
| 1 | Vbat | VCC_33L | 3.3V 전원 공급 |
| 2 | PC13 | LED0 | LED POWER |
| 3 | PC14 | LED_TX | LED TX |
| 4 | PC15 | LED_RX | LED RX |
| 5 | OSC_IN | XTAL1 | 크리스탈 INPUT |
| 6 | OSC_OUT | XTAL2 | 크리스탈 OUTPUT |
| 7 | NRST | RESET | RESET |
| 8 | PC0 | SIG_ADC0 | ADC0 INPUT |
| 9 | PC1 | ADC_SELECT0 | ANALOG MUX SELECT0 |
| 10 | PC2 | ADC_SELECT1 | ANALOG MUX SELECT1 |
| 11 | PC3 | VDD_VOLT | 입력전압 ADC |
| 12 | VSSA | VSSA | ADC 기준전압 3.3V |
| 13 | VDDA | VDDA | ADC 기준전압 0V |
| 14 | PA0 | SIG_MOT1+ | 1번 외부포트 OUPUT |
| 15 | PA1 | SIG_MOT1- | 1번 외부포트 OUPUT |
| 16 | PA2 | SIG_MOT2+ | 2번 외부포트 OUPUT |
| 17 | PA3 | SIG_MOT2- | 2번 외부포트 OUPUT |
| 18 | VSS4 | GND | 0V 기준전압 |
| 19 | VDD4 | VCC_33L | 3.3V 기준전압 |
| 20 | PA4 | NC | RESERVED |
| 21 | PA5 | SIG_ADC1 | ADC1 INPUT |
| 22 | PA6 | SIG_BUZZER | 버저 OUTPUT |
| 23 | PA7 | NC | RESERVED |
| 24 | PC4 | SIG_MIC | 마이크신호 INPUT |
| 25 | PC5 | NC | RESERVED |
| 26 | PB0 | NC | RESERVED |
| 27 | PB1 | NC | RESERVED |
| 28 | PB2 | BOOT1 | RESERVED |
| 29 | PB10 | PC_TXD | PC 로 전송 |
| 30 | PB11 | PC_RXD | PC 에서 수신 |
| 31 | VSS1 | GND | 0V 기준전압 |
| 32 | VDD1 | VCC_33L | 3.3V 기준전압 |
| 33 | PB12 | LED3 | LED AUX |
| 34 | PB13 | LED4 | LED MANAGE |
| 35 | PB14 | LED5 | LED PROGRAM |
| 36 | PB15 | LED6 | LED PLAY |
| 37 | PC6 | SIG_MOT3+ | 3번 외부포트 OUPUT |
| 38 | PC7 | SIG_MOT3- | 3번 외부포트 OUPUT |
| 39 | PC8 | SIG_MOT4+ | 4번 외부포트 OUPUT |
| 40 | PC9 | SIG_MOT4- | 4번 외부포트 OUPUT |
| 41 | PA8 | SIG_MOT5+ | 5번 외부포트 OUPUT |
| 42 | PA9 | NC | RESERVED |
| 43 | PA10 | NC | RESERVED |
| 44 | PA11 | SIG_MOT5- | 5번 외부포트 OUPUT |
| 45 | PA12 | ZIGBEE_RESET | Zigbee 모듈 ENABLE |
| 46 | PA13 | USB_SLEEP | USB 연결여부 |
| 47 | VSS2 | GND | 0V 기준전압 |
| 48 | VDD2 | VCC_33L | 3.3V 기준전압 |
| 49 | PA14 | SW_RT | R 버튼 |
| 50 | PA15 | SW_LF | L 버튼 |
| 51 | PC10 | SW_DN | D 버튼 |
| 52 | PC11 | SW_UP | U 버튼 |
| 53 | PC12 | ZIGBEE_TXD | Zigbee로 전송 |
| 54 | PD2 | ZIGBEE_RXD | Zigbee로부터 수신 |
| 55 | PB3 | SW_START | START 버튼 |
| 56 | PB4 | ENABLE_TX | 다이나믹셀로 전송 ENABLE |
| 57 | PB5 | ENABLE_RX | 다이나믹셀로부터 수신 ENABLE |
| 58 | PB6 | DXL_TXD | 다이나믹셀로 전송 |
| 59 | PB7 | DXL_RXD | 다이나믹셀로부터 수신 |
| 60 | BOOT0 | BOOT0 | RESERVED |
| 61 | PB8 | SIG_MOT6+ | 6번 외부포트 OUPUT |
| 62 | PB9 | SIG_MOT6- | 6번 외부포트 OUPUT |
| 63 | VSS3 | GND | 0V 기준전압 |
| 64 | VDD3 | VCC_33L | 3.3V 기준전압 |
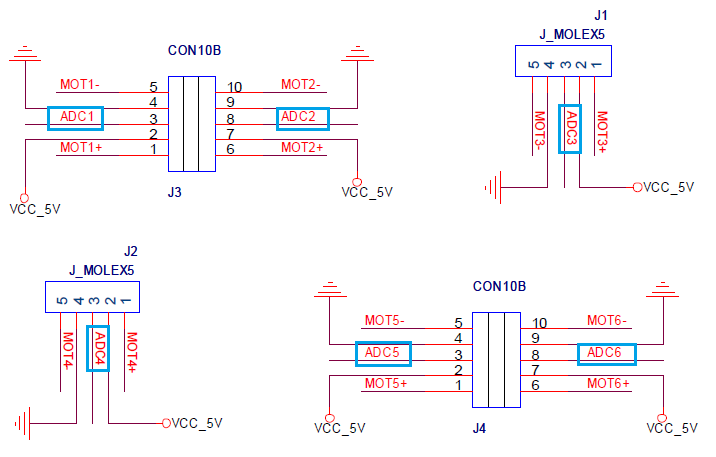
CM-530의 외부 포트 핀 구성은 다음과 같습니다. 외부 포트 눈금 표시로 포트 1 ~ 포트 6을 확인할 수 있습니다. 포트와 관련된 자세한 사항은 CM-530 제어기 부분을 참조하십시오.
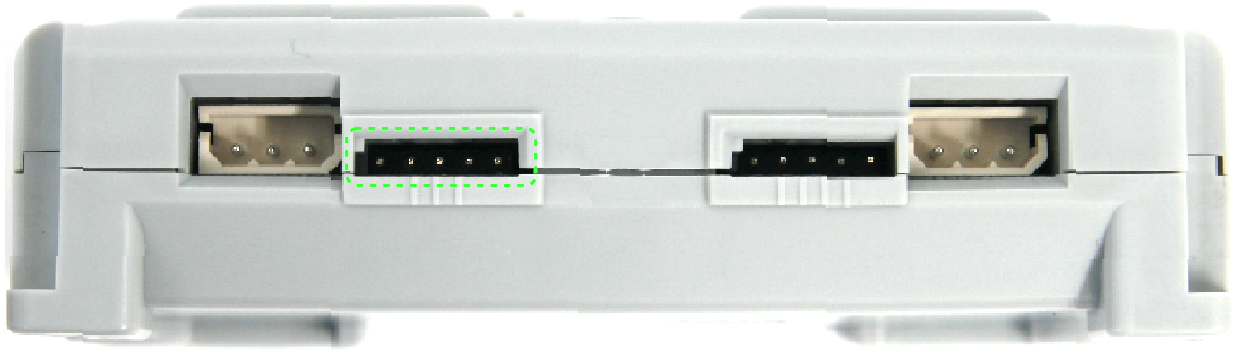
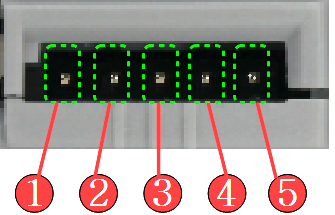
- OUT1 : 3.3V 출력 가능 (최대 허용 전류 0.3A)
- VCC (5V)
- ADC : 사용자가 제작한 센서의 아날로그 신호를 읽을 수 있음.
- GND
- OUT2 : 3.3V 출력 가능 (최대 허용 전류 0.3A)
프로젝트 열기
함께 제공되는 ‘01 LED’ 프로젝트를 열어 보겠습니다.
Eclipse를 실행시키고 ‘File – New – Makefile Project with Existing Code’를 선택합니다.
‘Browse..’ 버튼을 누르고, 압축을 풀어 놓은 폴더중 “01 LED”를 선택하고 “확인”을 눌러 완료합니다.
프로젝트 생성 후에는 ‘Project – Clean, Build’를 한 번씩 실행 해 주십시오.
위와 같이 실행 후에, Console창에서 제대로 수행 되었는지 확인 할 수 있습니다.
아래와 다르게 제대로 실행되지 않았을 경우에는, 개발환경 설치를 다시 한번 확인해 주시기 바랍니다.
bin 파일 다운로드 하기
build에 성공하면 bin파일이 예제 폴더에 생성됩니다. 제어기에 만든 펌웨어를 설치하기 위해서는 로보플러스 터미널과 제어기 부트로더를 이용해야 합니다. 펌웨어 설치 및 실행에 대한 자세한 내용은 부트로더에서 프로그램 설치/실행 부분을 참조하십시오.
부트로더
부트로더란, 제어기를 사용할 수 있도록 도와주는 프로그램입니다. 부트로더는 사용자가 지울 수 없으며 만약, 이 프로그램이 망가진다면 제어기를 사용할 수 없게됩니다. 부트로더는 공장 출하시 제어기에 설치된 상태로 생산됩니다.
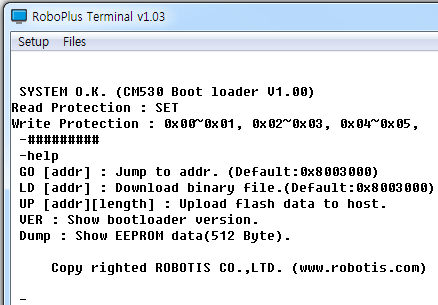
부트로더에서 사용할 수 있는 명령은 ‘help’ 명령으로 확인할 수 있습니다.
부트로더 진입/나가기
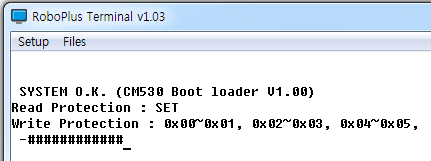
부트로더 진입
부트로더는 키보드의 ‘#’키(Shift+숫자3키)를 누르고 있는 상태에서 제어기를 켜거나 리셋 스위치를 눌러주면 진입할 수 있습니다.
성공하면 다음과 같이 화면이 나타납니다
부트로더 나가기
사용자 작업을 완료하면, GO명령으로 원하는 주소로 점프하거나, 제어기를 리셋하여 부트로더에서 나갈 수 있습니다.
APP/SYS 사용법
APP/SYS 명령으로 프로그램 시작 위치를 설정할 수 있습니다. 프로그램 시작 위치가 설정되면, 제어기의 전원을 켜거나 리셋할 때, 설정된 프로그램 시작위치에서 프로그램이 실행됩니다.
Atmega2561을 사용하는 제어기의 메모리맵은 다음과 같습니다.
-
부트로더로 진입한 후 명령창에 APP 명령을 입력하면, 다음번 리셋 후 유저 어플리케이션 영역부터 실행됩니다.
(기본 제공 펌웨어, 사용자 프로그램 등 대부분의 프로그램들은 특별한 이유가 없다면 0번지부터 시작됩니다.) -
부트로더로 진입한 후 명령창에 SYS 명령을 입력하면, 다음번 리셋 후 부트로더가 실행됩니다.
(‘#’키를 누르지 않아도 부트로더상태로 시작됩니다.)
프로그램 설치/실행
제어기 펌웨어를 설치하기 위한 준비 작업은 다음과 같습니다.
- 설치할 제어기 펌웨어(hex 파일)를 준비합니다.
- PC와 제어기를 연결합니다.
- 로보플러스 터미널을 실행하여 통신 포트를 설정합니다.
- 제어기 부트로더를 실행합니다. (부트로더 진입 방법 참고)
준비가 완료되면 다음과 같은 절차로 제어기 펌웨어를 설치할 수 있습니다.
-
부트로더에서 L명령(혹은 Load)을 입력합니다.
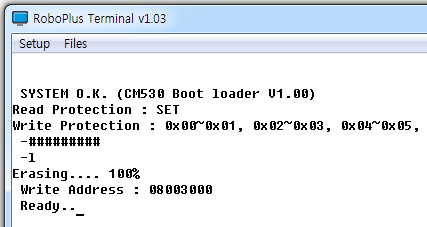
-
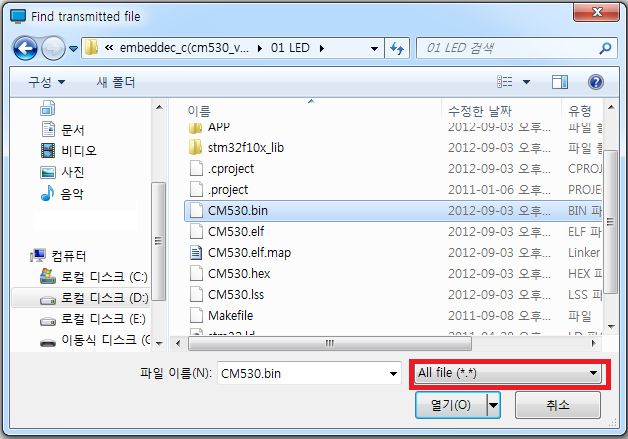
로보플러스 터미널의 Files메뉴에서 Transmit file을 선택하고, 준비된 펌웨어(hex 파일)를 선택합니다.
-
파일이 전송됩니다. 파일이 전송되는 도중 제어기의 전원이 꺼지거나, 케이블이 빠지지 않도록 주의하십시오.
-
파일 전송이 완료되면, GO 명령을 사용하여 프로그램을 실행할 수 있습니다.
- GO명령만 입력한 경우 0번지에서 프로그램을 실행하게 됩니다.
- G [Address] 와 같이 G 명령 뒤에 실행 주소(16진수)를 입력하면 그 위치부터 프로그램을 실행합니다.
부가설명
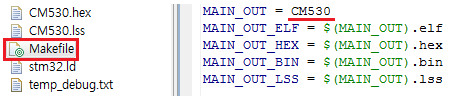
생성파일명
프로젝트를 빌드한 후 생성된 파일의 명칭은 “예제\Makefile” 에서 변경할 수 있습니다. 아래 그림과 같이 “Makefile” 에서 “MAIN_OUT = “ 뒤에 원하는 파일명을 적으면 됩니다.
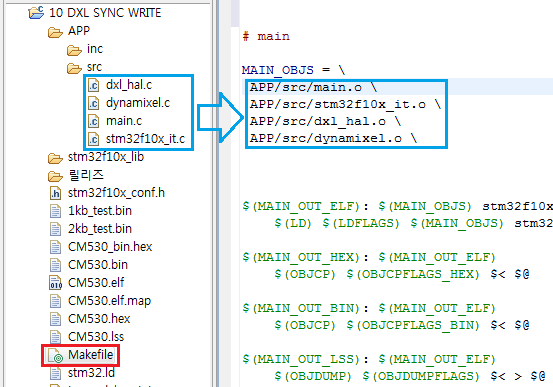
object file list
아래 그림과 같이 “예제\APP\src” 폴더에 있는 확장자가 “c”인 파일들에 해당하는 object file 명칭을 전부 “Makefile” 에 명시해야 합니다.
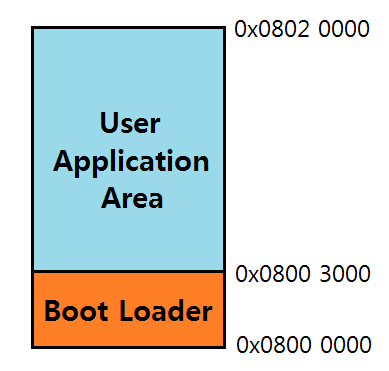
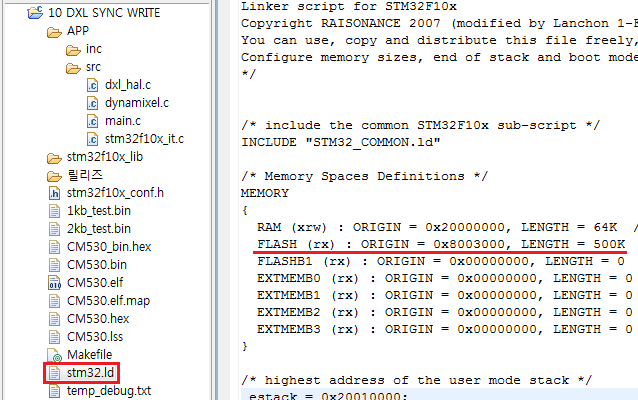
Firmware 시작 주소
아래의 메모리 맵(일부)와 같이 부트로더 영역과 펌웨어 영역이 나뉘여져 있습니다.
펌웨어의 시작주소가 기본으로 0X8003000으로 되여있으나 유저가 변경할 수 있습니다.
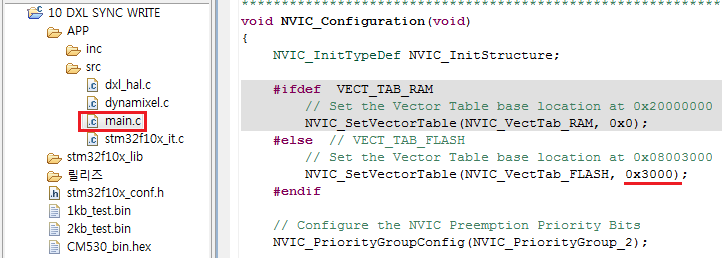
아래의 그림은 0X8003000로 설정할 때의 예를 보여줍니다.
-
stm32.ld 변경
-
Vector table 변경
예제
LED 제어
제어기의 각 LED를 제어할 수 있습니다.
- 준비물
- CM-530
- 이론
- 제어기의 마이크로 컨트롤러는 I/O포트를 통해 제어기와 연결된 LED등의 주변 장치를 제어할 수 있습니다. 이 예제를 통해 제어기에 장착되어 있는 LED를 제어해 볼 수 있습니다.
- 포트번호와 핀번호는 “01 LED\APP\src\main.c” 또는 제어기 포트맵을 확인하시기 바랍니다.
-
소스
int main(void) { /* System Clocks Configuration */ RCC_Configuration(); /* NVIC configuration */ NVIC_Configuration(); /* Configure the GPIO ports */ GPIO_Configuration(); SysTick_Configuration(); while(1) { GPIO_SetBits(PORT_LED_POWER, PIN_LED_POWER); GPIO_ResetBits(PORT_LED_MANAGE, PIN_LED_MANAGE); mDelay(250); GPIO_SetBits(PORT_LED_MANAGE, PIN_LED_MANAGE); GPIO_ResetBits(PORT_LED_PROGRAM, PIN_LED_PROGRAM); mDelay(250); GPIO_SetBits(PORT_LED_PROGRAM, PIN_LED_PROGRAM); GPIO_ResetBits(PORT_LED_PLAY, PIN_LED_PLAY); mDelay(250); GPIO_SetBits(PORT_LED_PLAY, PIN_LED_PLAY); GPIO_ResetBits(PORT_LED_TX, PIN_LED_TX); mDelay(250); GPIO_SetBits(PORT_LED_TX, PIN_LED_TX); GPIO_ResetBits(PORT_LED_RX, PIN_LED_RX); mDelay(250); GPIO_SetBits(PORT_LED_RX, PIN_LED_RX); GPIO_ResetBits(PORT_LED_AUX, PIN_LED_AUX); mDelay(250); GPIO_SetBits(PORT_LED_AUX, PIN_LED_AUX); GPIO_ResetBits(PORT_LED_POWER, PIN_LED_POWER); mDelay(250); } return 0; } - 결과
- 제어기의 모든 LED가 순차적으로 점등됩니다.
버튼
제어기 버튼 입력을 받을 수 있습니다.
- 준비물
- CM-530
- 이론
- 제어기의 마이크로 컨트롤러의 I/O포트를 통해 제어기와 연결된 장치의 전기적 신호를 읽을 수 있습니다. 이 예제를 통해 제어기에 장착되어 있는 스위치의 눌림 상태를 확인할 수 있습니다.
- 포트번호와 핀번호는 “02 BUTTON\APP\src\main.c” 또는 제어기 포트맵을 확인하시기 바랍니다.
-
소스
int main(void) { /* System Clocks Configuration */ RCC_Configuration(); /* NVIC configuration */ GPIO_Configuration(); /* Configure the GPIO ports */ NVIC_Configuration(); GPIO_ResetBits(PORT_LED_POWER, PIN_LED_POWER); while(1) { if( GPIO_ReadInputDataBit(PORT_SW_UP, PIN_SW_UP) != SET ) GPIO_ResetBits(PORT_LED_MANAGE, PIN_LED_MANAGE); else if( GPIO_ReadInputDataBit(PORT_SW_DOWN, PIN_SW_DOWN) != SET ) GPIO_ResetBits(PORT_LED_AUX, PIN_LED_AUX); else if( GPIO_ReadInputDataBit(PORT_SW_LEFT, PIN_SW_LEFT) != SET ) GPIO_ResetBits(PORT_LED_PROGRAM, PIN_LED_PROGRAM); else if( GPIO_ReadInputDataBit(PORT_SW_RIGHT, PIN_SW_RIGHT) != SET ) GPIO_ResetBits(PORT_LED_PLAY, PIN_LED_PLAY); else if( GPIO_ReadInputDataBit(PORT_SW_START, PIN_SW_START) != SET ) { GPIO_ResetBits(PORT_LED_MANAGE, PIN_LED_MANAGE); GPIO_ResetBits(PORT_LED_PROGRAM, PIN_LED_PROGRAM); GPIO_ResetBits(PORT_LED_PLAY, PIN_LED_PLAY); GPIO_ResetBits(PORT_LED_TX, PIN_LED_TX); GPIO_ResetBits(PORT_LED_RX, PIN_LED_RX); GPIO_ResetBits(PORT_LED_AUX, PIN_LED_AUX); } else { GPIO_SetBits(PORT_LED_MANAGE, PIN_LED_MANAGE); GPIO_SetBits(PORT_LED_PROGRAM, PIN_LED_PROGRAM); GPIO_SetBits(PORT_LED_PLAY, PIN_LED_PLAY); GPIO_SetBits(PORT_LED_TX, PIN_LED_TX); GPIO_SetBits(PORT_LED_RX, PIN_LED_RX); GPIO_SetBits(PORT_LED_AUX, PIN_LED_AUX); } } return 0; } - 결과
- 버튼을 누르면, 눌린 버튼에 따라 서로 다른 LED가 켜집니다.
시리얼 통신
PC와 제어기가 시리얼 통신을 할 수 있습니다.
- 준비물
- CM-530과 PC가 USB케이블을 통해 연결된 상태.
- 예제의 통신 속도는 57600bps로 설정되어 있습니다.
- 이론
- 시리얼 통신은 제어기의 값을 PC로 전송하여 사용자에게 보여줄 수 있는 가장 기본적인 수단입니다. 이 예제를 통해 제어기와 시리얼 통신을 해볼 수 있습니다.
- 제어기와 PC사이의 시리얼 통신은 USART3채널을 통해 이루어집니다.
- 포트번호와 핀번호는 “03 SERIAL COMMUNICATION\APP\src\main.c” 또는 제어기 포트맵을 확인하시기 바랍니다.
-
소스
int main(void) { /* System Clocks Configuration */ RCC_Configuration(); /* NVIC configuration */ NVIC_Configuration(); /* Configure the GPIO ports */ GPIO_Configuration(); SysTick_Configuration(); /* USART Configuration */ USART_Configuration(57600); GPIO_ResetBits(PORT_LED_POWER, PIN_LED_POWER); while(1) { ReceivedData = RxDByte_PC(); if(ReceivedData == 'w') TxDString("Welcome!\r\n"); else if(ReceivedData == 'g') TxDString("Goodbye!\r\n"); } return 0; } - 결과
-
PC에서 ‘w’ 버튼을 누르면 “Welcome!”, ‘g’버튼을 누르면 “Goodbye!”가 출력됩니다.
-
버저
제어기의 버저를 사용할 수 있습니다.
- 준비물
- CM-530
- 이론
- 마이크로 컨트롤러의 I/O 포트를 통해 버저 회로의 신호를 제어할 수 있습니다. 버저는 신호 주파수를 조절하여 서로 다른 음계를 연주할 수 있습니다.
- 포트번호와 핀번호는 “04 BUZZER\APP\src\main.c” 또는 제어기 포트맵을 확인하시기 바랍니다.
- 음계과 주파수의 관계는 다음을 참조하십시오.
-
시간은 주파수의 역수입니다. 주파수를 시간으로 변환하는 공식은 다음과 같습니다.
시간(초) = 1 / (주파수)
| 옥타브 /Scale |
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| C | 32.7032 | 65.4064 | 130.8128 | 261.6256 | 523.2511 | 1046.502 | 2093.005 | 4186.009 |
| C# | 34.6478 | 69.2957 | 138.5913 | 277.1826 | 554.3653 | 1108.731 | 2217.461 | 4434.922 |
| D | 36.7081 | 73.4162 | 146.8324 | 293.6648 | 587.3295 | 1174.659 | 2349.318 | 4698.636 |
| D# | 38.8909 | 77.7817 | 155.5635 | 311.1270 | 622.2540 | 1244.508 | 2489.016 | 4978.032 |
| E | 41.2034 | 82.4069 | 164.8138 | 329.6276 | 659.2551 | 1318.510 | 2637.020 | 5274.041 |
| F | 43.6535 | 87.3071 | 174.6141 | 349.2282 | 698.4565 | 1396.913 | 2793.826 | 5587.652 |
| F# | 46.2493 | 92.4986 | 184.9972 | 369.9944 | 739.9888 | 1479.978 | 2959.955 | 5919.911 |
| G | 48.9994 | 97.9989 | 195.9977 | 391.9954 | 783.9909 | 1567.982 | 3135.963 | 6271.927 |
| G# | 51.9130 | 103.8262 | 207.6523 | 415.3047 | 830.6094 | 1661.219 | 3322.438 | 6644.875 |
| A | 55.0000 | 110.0000 | 220.0000 | 440.0000 | 880.0000 | 1760.000 | 3520.000 | 7040.000 |
| A# | 58.2705 | 116.5409 | 233.0819 | 466.1638 | 932.3275 | 1864.655 | 3729.310 | 7458.620 |
| G | 61.7354 | 123.4708 | 246.9417 | 493.8833 | 987.7666 | 1975.533 | 3951.066 | 7902.133 |
단위 : Hz
-
소스
int main(void) { /* System Clocks Configuration */ RCC_Configuration(); /* NVIC configuration */ NVIC_Configuration(); /* NVIC configuration */ GPIO_Configuration(); SysTick_Configuration(); GPIO_ResetBits(PORT_LED_POWER, PIN_LED_POWER); while(1) { if( GPIO_ReadInputDataBit(PORT_SW_UP, PIN_SW_UP) != SET ) { GPIO_ResetBits(PORT_LED_MANAGE, PIN_LED_MANAGE); GPIO_ResetBits(PORT_LED_PROGRAM, PIN_LED_PROGRAM); GPIO_ResetBits(PORT_LED_PLAY, PIN_LED_PLAY); GPIO_ResetBits(PORT_LED_TX, PIN_LED_TX); GPIO_ResetBits(PORT_LED_RX, PIN_LED_RX); GPIO_ResetBits(PORT_LED_AUX, PIN_LED_AUX); GPIO_ResetBits(PORT_BUZZER, PIN_BUZZER); mDelay(1); GPIO_SetBits(PORT_BUZZER, PIN_BUZZER); mDelay(1); } else { GPIO_SetBits(PORT_LED_MANAGE, PIN_LED_MANAGE); GPIO_SetBits(PORT_LED_PROGRAM, PIN_LED_PROGRAM); GPIO_SetBits(PORT_LED_PLAY, PIN_LED_PLAY); GPIO_SetBits(PORT_LED_TX, PIN_LED_TX); GPIO_SetBits(PORT_LED_RX, PIN_LED_RX); GPIO_SetBits(PORT_LED_AUX, PIN_LED_AUX); GPIO_SetBits(PORT_BUZZER, PIN_BUZZER); } } return 0; } -
결과
- Start 버튼을 누르는 동안 전원LED를 제외한 여섯 LED가 켜지고 버저에서 같은 음으로 소리가 납니다.
마이크
제어기의 마이크를 사용하여 외부 소리를 감지할 수 있습니다.
- 준비물
- CM-530
- 이론
- 마이크 회로는 일정 크기 이상의 소리를 감지하면 마이크로 컨트롤러의 I/O포트에 신호를 발생하게 됩니다. 이 신호를 감지하여 외부 소리를 감지할 수 있습니다.
- 포트번호와 핀번호는 “05 MIC\APP\src\main.c” 또는 제어기 포트맵을 확인하시기 바랍니다.
-
소스
int main(void) { /* System Clocks Configuration */ RCC_Configuration(); /* NVIC configuration */ NVIC_Configuration(); /* NVIC configuration */ GPIO_Configuration(); SysTick_Configuration(); GPIO_ResetBits(PORT_LED_POWER, PIN_LED_POWER); while(1) { if( GPIO_ReadInputDataBit(PORT_MIC, PIN_MIC) != SET) { GPIO_ResetBits(PORT_LED_MANAGE, PIN_LED_MANAGE); GPIO_ResetBits(PORT_LED_PROGRAM, PIN_LED_PROGRAM); GPIO_ResetBits(PORT_LED_PLAY, PIN_LED_PLAY); GPIO_ResetBits(PORT_LED_TX, PIN_LED_TX); GPIO_ResetBits(PORT_LED_RX, PIN_LED_RX); GPIO_ResetBits(PORT_LED_AUX, PIN_LED_AUX); mDelay(1000); } else { GPIO_SetBits(PORT_LED_MANAGE, PIN_LED_MANAGE); GPIO_SetBits(PORT_LED_PROGRAM, PIN_LED_PROGRAM); GPIO_SetBits(PORT_LED_PLAY, PIN_LED_PLAY); GPIO_SetBits(PORT_LED_TX, PIN_LED_TX); GPIO_SetBits(PORT_LED_RX, PIN_LED_RX); GPIO_SetBits(PORT_LED_AUX, PIN_LED_AUX); } } return 0; } - 결과
- 마이크에 소리가 감지되면, 전원LED를 제외한 여섯 LED가 1초간 켜졌다 꺼집니다.
올로 서보모터(회전방향 제어)
올로 서보모터의 회전방향을 제어하는 방법을 배웁니다.
- 준비물
- CM-530
- 올로 서보모터 (1번 외부포트에 연결해야 예제를 동작시킬 수 있습니다.)
- 이론
-
제어기는 마이크로 컨트롤러의 SIG_MOT1+와 SIG+MOT1- 핀을 통해 1번 외부포트의 MOT1+ 와 MOT1-핀의 값을 제어함으로써 올로 서보모터의 회전방향을 제어합니다.
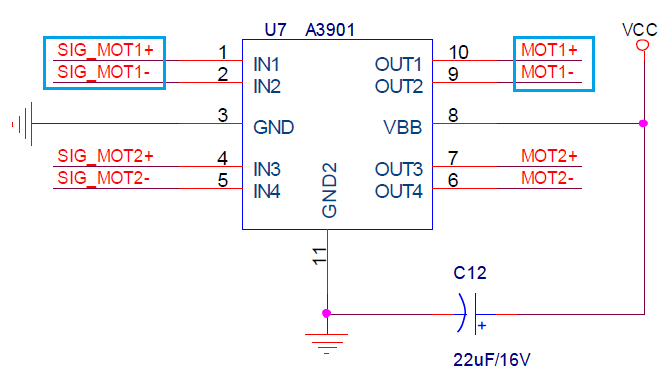
-
포트번호와 핀번호는 “06 OLLO MOTOR ROTATE\APP\src\main.c” 또는 제어기 포트맵을 확인하시기 바랍니다.
-
소스
int main(void) { /* System Clocks Configuration */ RCC_Configuration(); /* NVIC configuration */ NVIC_Configuration(); /* GPIO configuration */ GPIO_Configuration(); SysTick_Configuration(); GPIO_ResetBits(PORT_SIG_MOT1P,PIN_SIG_MOT1P); GPIO_ResetBits(PORT_SIG_MOT1M,PIN_SIG_MOT1M); GPIO_ResetBits(PORT_LED_POWER, PIN_LED_POWER); while(1) { GPIO_SetBits(PORT_SIG_MOT1P,PIN_SIG_MOT1P); GPIO_ResetBits(PORT_SIG_MOT1M,PIN_SIG_MOT1M); mDelay(5000); GPIO_SetBits(PORT_SIG_MOT1M,PIN_SIG_MOT1M); mDelay(5000); GPIO_SetBits(PORT_SIG_MOT1P,PIN_SIG_MOT1P); GPIO_SetBits(PORT_SIG_MOT1M,PIN_SIG_MOT1M); mDelay(2000); } return 0; } -
결과
- 1번 외부포트에 연결된 올로 서보모터는 역시침 방향으로 5초간 회전하고 순시침 방향으로 5초간 회전 한 후 2초간 정지하는 운동을 반복합니다.
올로 서보모터(위치값 읽기)
올로 서보모터 혼(horn) 위치값을 읽는 방법을 배웁니다.
- 준비물
- CM-530
- 올로 서보모터
- 이론
- 제어기의 마이크로 컨트롤러는 아날로그 신호를 디지털값으로 변경할 수 있습니다. 이 예제를 통해 제어기 외부에 연결된 올로 서보모터 혼 위치를 나타내는 아날로그 전압값을 AD 변환할 수 있습니다.
-
포트번호와 핀번호는 “06 OLLO MOTOR ROTATE\APP\src\main.c” 또는 제어기 포트맵을 확인하시기 바랍니다.
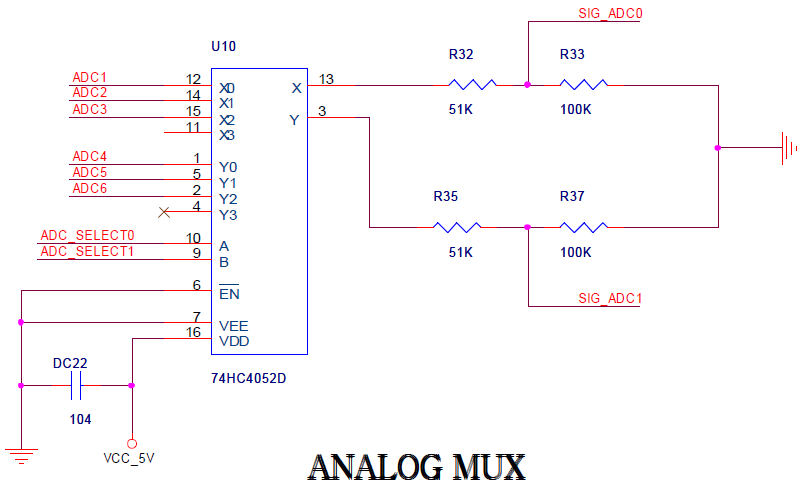
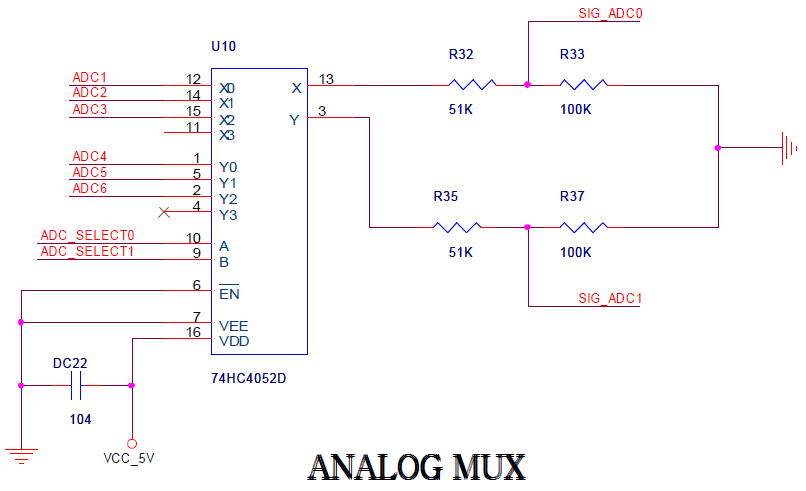
- ANALOG MUX (74HC4052D) 를 이용한 이유는 외부 임피던스를 차단 하고, 5V -> 3.3V로 레벨 변환을 하기 위해서입니다.
-
위의 ADC MUX회로에서 ADC_SELECT0, ADC_SELECT1 두 신호값 조합에 의해 SIG_ADC0은 ADC1, ADC2, ADC3 중에서 하나를 선택하여 마이크로 컨트롤러에 입력하고 SIG_ADC1은 ADC4, ADC5, ADC6 중에서 하나를 선택하여 마이크로 컨트롤러에 입력하고 마이크로 컨트롤러는 이 아날로그값을 AD변환합니다.
- 포트번호와 핀번호는 “07 OLLO MOTOR POSITION\APP\src\main.c” 또는 제어기 포트맵을 확인하시기 바랍니다.
-
소스
int main(void) { /* System Clocks Configuration */ RCC_Configuration(); /* NVIC configuration */ NVIC_Configuration(); /* GPIO configuration */ GPIO_Configuration(); SysTick_Configuration(); /* ADC configuration */ ADC_Configuration(); GPIO_ResetBits(PORT_SIG_MOT1P,PIN_SIG_MOT1P); GPIO_ResetBits(PORT_SIG_MOT1M,PIN_SIG_MOT1M); GPIO_ResetBits(PORT_SIG_MOT2P,PIN_SIG_MOT2P); GPIO_ResetBits(PORT_SIG_MOT2M,PIN_SIG_MOT2M); GPIO_ResetBits(PORT_SIG_MOT3P,PIN_SIG_MOT3P); GPIO_ResetBits(PORT_SIG_MOT3M,PIN_SIG_MOT3M); GPIO_ResetBits(PORT_SIG_MOT4P,PIN_SIG_MOT4P); GPIO_ResetBits(PORT_SIG_MOT4M,PIN_SIG_MOT4M); GPIO_ResetBits(PORT_SIG_MOT5P,PIN_SIG_MOT5P); GPIO_ResetBits(PORT_SIG_MOT5M,PIN_SIG_MOT5M); GPIO_ResetBits(PORT_SIG_MOT6P,PIN_SIG_MOT6P); GPIO_ResetBits(PORT_SIG_MOT6M,PIN_SIG_MOT6M); GPIO_ResetBits(PORT_LED_POWER, PIN_LED_POWER); while(1) { GPIO_ResetBits(PORT_ADC_SELECT0,PIN_ADC_SELECT0); GPIO_ResetBits(PORT_ADC_SELECT1,PIN_ADC_SELECT1); mDelay(10); /* Start ADC1,ADC2 Software Conversion */ ADC_SoftwareStartConvCmd(ADC1, ENABLE); ADC_SoftwareStartConvCmd(ADC2, ENABLE); mDelay(10); POT_1 = (ADC_GetConversionValue(ADC1))>>2; POT_4 = (ADC_GetConversionValue(ADC2))>>2; GPIO_SetBits(PORT_ADC_SELECT0,PIN_ADC_SELECT0); GPIO_ResetBits(PORT_ADC_SELECT1,PIN_ADC_SELECT1); mDelay(10); /* Start ADC1,ADC2 Software Conversion */ ADC_SoftwareStartConvCmd(ADC1, ENABLE); ADC_SoftwareStartConvCmd(ADC2, ENABLE); mDelay(10); POT_2 = (ADC_GetConversionValue(ADC1))>>2; POT_5 = (ADC_GetConversionValue(ADC2))>>2; GPIO_ResetBits(PORT_ADC_SELECT0,PIN_ADC_SELECT0); GPIO_SetBits(PORT_ADC_SELECT1,PIN_ADC_SELECT1); mDelay(10); /* Start ADC1,ADC2 Software Conversion */ ADC_SoftwareStartConvCmd(ADC1, ENABLE); ADC_SoftwareStartConvCmd(ADC2, ENABLE); mDelay(10); POT_3 = (ADC_GetConversionValue(ADC1))>>2; POT_6 = (ADC_GetConversionValue(ADC2))>>2; TxDWord16(POT_1); TxDByte_PC(' '); TxDWord16(POT_2); TxDByte_PC(' '); TxDWord16(POT_3); TxDByte_PC(' '); TxDWord16(POT_4); TxDByte_PC(' '); TxDWord16(POT_5); TxDByte_PC(' '); TxDWord16(POT_6); TxDByte_PC(' '); TxDByte_PC('\r'); TxDByte_PC('\n'); } return 0; } - 결과
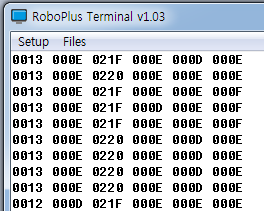
- 임의의 외부포트에 올로 서보모터를 연결하면 출력되는 화면을 통해 서보모터 혼의 위치값을 알 수 있습니다. 출력값 범위는 0~0x03FF 입니다.
-
아래 그림은 3번 외부포트에 올로 서보모터를 연결했을 때 출력화면입니다.
적외선 센서
적외선 센서를 사용하는 방법을 배웁니다.
- 준비물
- CM-530과 PC를 USB케이블을 통해 연결합니다.
- 적외선 센서 (1번 외부포트에 연결해야 예제를 동작시킬 수 있습니다.)
- 이론
-
제어기의 마이크로 컨트롤러는 아날로그 신호를 디지털값으로 변경할 수 있습니다. 이 예제를 통해 제어기 외부에 연결된 적외선 센서의 아날로그 전압값을 AD 변환할 수 있습니다.
- ANALOG MUX (74HC4052D) 를 이용한 이유는 외부 임피던스를 차단 하고, 5V -> 3.3V로 레벨 변환을 하기 위해서입니다.
-
위의 ADC MUX회로에서 ADC_SELECT0, ADC_SELECT1 두 신호값 조합에 의해 SIG_ADC0은 ADC1, ADC2, ADC3 중에서 하나를 선택하여 마이크로 컨트롤러에 입력하고 SIG_ADC1은 ADC4, ADC5, ADC6 중에서 하나를 선택하여 마이크로 컨트롤러에 입력하고 마이크로 컨트롤러는 이 아날로그랎을 AD변환합니다.
- 포트번호와 핀번호는 “08 IR SENSOR\APP\src\main.c” 또는 제어기 포트맵을 확인하시기 바랍니다.
-
-
소스
int main(void) { /* System Clocks Configuration */ RCC_Configuration(); /* NVIC configuration */ NVIC_Configuration(); /* GPIO configuration */ GPIO_Configuration(); SysTick_Configuration(); /* ADC configuration */ ADC_Configuration(); GPIO_ResetBits(PORT_SIG_MOT1P,PIN_SIG_MOT1P); GPIO_ResetBits(PORT_SIG_MOT1M,PIN_SIG_MOT1M); //GPIO_ResetBits(PORT_LED_POWER, PIN_LED_POWER); while(1) { GPIO_SetBits(PORT_SIG_MOT1P, PIN_SIG_MOT1P); GPIO_ResetBits(PORT_SIG_MOT1M, PIN_SIG_MOT1M); GPIO_ResetBits(PORT_ADC_SELECT0,PIN_ADC_SELECT0); GPIO_ResetBits(PORT_ADC_SELECT1,PIN_ADC_SELECT1); uDelay(30); /* Start ADC1,ADC2 Software Conversion */ ADC_SoftwareStartConvCmd(ADC1, ENABLE); //ADC_SoftwareStartConvCmd(ADC2, ENABLE); uDelay(5); IR_1 = (ADC_GetConversionValue(ADC1)); GPIO_ResetBits(PORT_SIG_MOT1P, PIN_SIG_MOT1P); GPIO_ResetBits(PORT_SIG_MOT1M, PIN_SIG_MOT1M); TxDWord16(IR_1); TxDByte_PC('\r'); TxDByte_PC('\n'); mDelay(5); } return 0; } - 결과
- 1번 외부포트에 적외선 센서를 연결하면 화면에 적외선 센서값을 출력합니다.
다이나믹셀 읽기/쓰기
다이나믹셀의 위치를 읽거나 설정할 수 있습니다. (보다 자세한 사항은 다이나믹셀 SDK를 확인 하세요)
- 준비물
- CM-530
- 이 예제는 다이나믹셀 ID가 1일 때 동작합니다.
- 이론
- 다이나믹셀은 정해진 패킷을 전송하여 제어할 수 있습니다. 제공되는 라이브러리를 활용하여 다이나믹셀의 위치 제어를 할 수 있습니다.
-
마이크로 컨트롤러와 다이나믹셀의 통신은 USART1 채널을 통해 이루어집니다
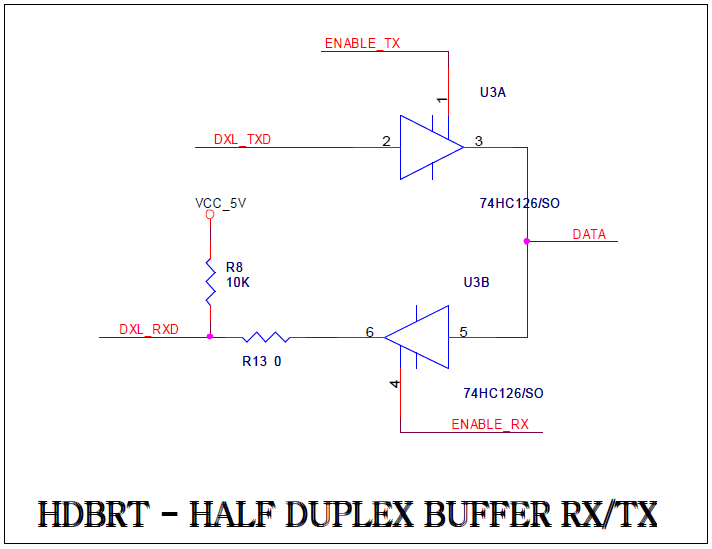
- 위의 그림은 다이나믹셀과의 통신을 위한 HALF DUPLEX BUFFER 회로 입니다.
- 포트번호와 핀번호는 “09 DXL READ_WRITE\APP\src\main.c” 또는 제어기 포트맵을 확인하시기 바랍니다.
-
소스
int main(void) { /* System Clocks Configuration */ RCC_Configuration(); /* NVIC configuration */ NVIC_Configuration(); /* GPIO configuration */ GPIO_Configuration(); SysTick_Configuration(); Timer_Configuration(); dxl_initialize( 0, 1 ); USART_Configuration(USART_PC, Baudrate_PC); while(1) { bMoving = dxl_read_byte( id, P_MOVING ); CommStatus = dxl_get_result(); if( CommStatus == COMM_RXSUCCESS ) { if( bMoving == 0 ) { // Change goal position if( INDEX == 0 ) INDEX = 1; else INDEX = 0; // Write goal position dxl_write_word( id, P_GOAL_POSITION_L, GoalPos[INDEX] ); } PrintErrorCode(); // Read present position wPresentPos = dxl_read_word( id, P_PRESENT_POSITION_L ); TxDWord16(GoalPos[INDEX]); TxDString(" "); TxDWord16(wPresentPos); TxDByte_PC('\r'); TxDByte_PC('\n'); } else PrintCommStatus(CommStatus); } return 0; } - 결과
- 다이나믹셀이 지정된 위치를 왕복하며, 제어기와 PC가 연결 되였을 때 다이나믹셀의 현재 위치를 터미널을 통해 출력합니다.
다이나믹셀 동기 제어
여러개의 다이나믹셀을 동기화하여 제어할 수 있습니다. (보다 자세한 사항은 다이나믹셀 SDK를 확인 하세요)
- 준비물
- CM-530과 다이나믹셀이 연결된 상태
- 이 예제는 다이나믹셀 ID가 1부터 순차적으로 3까지 설정되어 있을 때 동작합니다.
- 이론
- 다이나믹셀은 정해진 패킷을 전송하여 제어할 수 있습니다. 제공되는 라이브러리를 활용하여 다이나믹셀의 위치 제어를 할 수 있습니다.
-
마이크로 컨트롤러와 다이나믹셀의 통신은 USART1 채널을 통해 이루어집니다.
- 위의 그림은 다이나믹셀과의 통신을 위한 HALF DUPLEX BUFFER 회로 입니다.
- 포트번호와 핀번호는 “10 DXL SYNC WRITE\APP\src\main.c” 또는 제어기 포트맵을 확인하시기 바랍니다.
-
소스
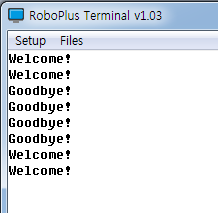
int main(void) { /* System Clocks Configuration */ RCC_Configuration(); /* NVIC configuration */ NVIC_Configuration(); /* GPIO configuration */ GPIO_Configuration(); SysTick_Configuration(); Timer_Configuration(); dxl_initialize( 0, 1 ); USART_Configuration(USART_PC, Baudrate_PC); for( i=0; i < NUM_ACTUATOR; i++ ) { id[i] = i+1; } // Set goal speed dxl_write_word( BROADCAST_ID, P_GOAL_SPEED_L, 0 ); // Set goal position dxl_write_word( BROADCAST_ID, P_GOAL_POSITION_L, AmpPos ); mDelay(1000); while(1) { // Make syncwrite packet dxl_set_txpacket_id(BROADCAST_ID); dxl_set_txpacket_instruction(INST_SYNC_WRITE); dxl_set_txpacket_parameter(0, P_GOAL_POSITION_L); dxl_set_txpacket_parameter(1, 2); for( i=0; i<NUM_ACTUATOR; i++ ) { dxl_set_txpacket_parameter(2+3*i, id[i]); dxl_set_txpacket_parameter(2+3*i+1, dxl_get_lowbyte(GoalPos)); dxl_set_txpacket_parameter(2+3*i+2, dxl_get_highbyte(GoalPos)); TxDByte_PC('\r'); TxDByte_PC('\n'); TxDWord16(GoalPos); } dxl_set_txpacket_length((2+1)*NUM_ACTUATOR+4); dxl_txrx_packet(); CommStatus = dxl_get_result(); if( CommStatus == COMM_RXSUCCESS ) PrintErrorCode(); else PrintCommStatus(CommStatus); GoalPos += 100; if( GoalPos > MAX_POSITION ) GoalPos -= MAX_POSITION; mDelay(CONTROL_PERIOD); } return 0; } - 결과
- 여러개의 다이나믹셀이 지정된 위치를 왕복하며, 현재 위치를 터미널을 통해 출력합니다.
RC100과 ZIGBee
RC-100을 이용하여 제어기를 동작시킬 수 있습니다. (보다 자세한 사항은 Zigbee SDK 를 확인 하세요)
- 준비물
- CM-530
- Zig-100/110 1쌍
- RC-100
- 이론
- Zig100이 장착되어있는 RC100 리모컨으로 제어기를 제어할 수 있습니다.
-
마이크로 컨트롤러와 RC100의 통신은 UART5 채널을 통해 이루어집니다.
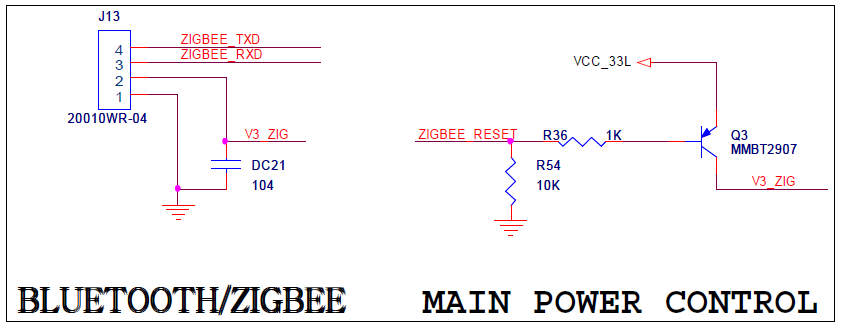
- 위 그림은 Zigbee 커넥터와 Zigbee의 전원공급회로입니다.
- 포트번호와 핀번호는 “11 RC100 ZIGBEE\APP\src\main.c” 또는 제어기 포트맵을 확인하시기 바랍니다.
-
소스
int main(void) { /* System Clocks Configuration */ RCC_Configuration(); /* NVIC configuration */ NVIC_Configuration(); /* Configure the GPIO ports */ GPIO_Configuration(); SysTick_Configuration(); zgb_initialize(0); USART_Configuration(USART_PC, 57600); GPIO_ResetBits(PORT_LED_POWER, PIN_LED_POWER); while(1) { if(zgb_rx_check() == 1) { RcvData = zgb_rx_data(); TxDWord16(RcvData); TxDByte_PC('\r'); TxDByte_PC('\n'); if(RcvData & RC100_BTN_1) GPIO_ResetBits(PORT_LED_MANAGE, PIN_LED_MANAGE); else GPIO_SetBits(PORT_LED_MANAGE, PIN_LED_MANAGE); if(RcvData & RC100_BTN_2) GPIO_ResetBits(PORT_LED_PROGRAM, PIN_LED_PROGRAM); else GPIO_SetBits(PORT_LED_PROGRAM, PIN_LED_PROGRAM); if(RcvData & RC100_BTN_3) GPIO_ResetBits(PORT_LED_PLAY, PIN_LED_PLAY); else GPIO_SetBits(PORT_LED_PLAY, PIN_LED_PLAY); } } return 0; } - 결과
- Zigbee가 정상적으로 연결된 경우, RC-100의 버튼을 누를 때 마다 제어기의 LED가 켜졌다 꺼집니다.