
작동하기
앱 설치하기
- STEAMCUP ENGINEER는 R+ Task 3.0를 지원합니다.
- R+ Task 3.0은 기존의 R+ Task 2.0과 R+ Motion 2.0이 통합된 프로그램입니다.
- 태스크 코드를 작성하여, 로봇을 원하는대로 명령으로 구동할 수 있습니다.
- 모션파일로 로봇의 행동을 직접 만들어 줄 수 있습니다.
![]()
R+ Task 3.0
- 윈도우에서 다운로드 하기
- 맥 OS에서 다운로드 하기
- 구글 플레이에서 다운로드(모바일) 하기
- [파이썬 추가] R+ Task 3.0 ios 버전은 앱스토어에 곧 출시됩니다. PC 버전을 이용해주세요.
![]()
로보플러스 엔지니어
참고: R+Task 3.0 모바일 버전은 파이썬 예제 다운로드는 PC 버전을 이용해주세요.
예제 다운로드 하기
아래 표에서 예제를 다운로드 받을수 있습니다. 예제를 다운로드 받은후, 스마트 기기 또는 PC를 이용하여 제어기에 저장해주세요.
- 키트2 사용자는 KIT2 타입에 맞는 프로그램(
MAX-E2,Commando,Scorpi,AutoBot,Strider)을 키트1에 포함된 CM-550에 직접 다운로드 받아야 합니다. - 예제 다운로드 하기 전, 로보플러스 매니저를 사용하여, CM-550의 펌웨어를 업데이트 하세요. 펌웨어 업데이트 따라하기.
- 예제를 PC에서 다운로드 받고 제어기에 저장하는 방법은 PC에서 예제 다운로드 받기를 따라 하세요.
- 예제를 스마트 디바이스에서 다운로드 받고 제어기에 저장하는 방법은 스마트 기기에서 예제 다운로드 받기를 따라하세요.
| 예제 | 파이썬 (.py) | 모션 (.mtn3) |
|---|---|---|
| MAX-E2 | 01_ENG2_Max_E2_PY.py | 01_ENG2_Max_E2_MO.mtn3 |
| Commando | 02_ENG2_Commando_PY.py | 파이썬 예제만 사용 |
| Scorpi | 03_ENG2_Scorpi_PY.py | 03_ENG2_Scorpi_MO.mtn3 |
| AutoBot (추가 예제) | 04_ENG2_Autobot_PY.py | 04_ENG2_Autobot_MO.mtn3 |
| Strider (추가 예제) | 05_ENG2_Strider_PY.py | 파이썬 예제만 사용 |
PC에서 예제 다운로드 받기
PC로 작성한 예제 또는 다운로드 받은 예제를 제어기에 다운로드 하는 방법입니다.
- CM-550의 Micro USB 포트를 이용하면 PC와 직접 연결하여 태스크(.tsk3) 및 모션(.mtn3) 파일을 업로드 할 수 있습니다.
- CM-550에 내장된 BLE 슬레이브 모듈과 BT-410 동글을 페어링하면 PC에서 원격으로 예제를 업로드 할 수 있습니다.
스마트 기기에서 예제 다운로드 받기
R+ Task 3.0 앱을 이용하여 제어기에 파일을 업로드 하려면 스마트 기기와 CM-550이 블루투스로 연결되어야 합니다.
스마트기기에서 작성한 예제 또는 다운로드 받은 예제를 제어기에 원격으로 다운로드 하는 방법입니다.
예제 실행하기
ROBOTIS ENGINEER 앱을 실행하고 조립된 로봇 예제를 선택하면 해당 예제에 맞는 다양한 기능들을 사용할 수 있습니다.
주의 : 조립된 로봇과 다른 예제를 선택할 경우 로봇이 정상적으로 작동하지 않습니다.
앱 화면 우측 상단의 메뉴버튼을 눌러 환경 설정을 할 수 있습니다.
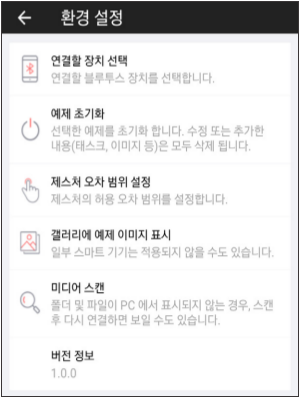
연결할 장치 선택 : 연결할 블루투스 장치를 선택합니다.
예제 초기화 : 선택한 예제를 초기화 하는 기능입니다.
제스처 오차 범위 설정 : 제스처의 허용 오차 범위를 설정합니다.
갤러리에 예제 이미지 표시 : 스마트기기의 갤러리에 예제 이미지를 표시합니다.
미디어 스캔 : 파일이 PC에서 보이지 않을 때 사용하는 기능입니다.
버전 정보 : 현재 앱의 버전을 확인하는 기능입니다.
블루투스 연결하기
엔지니어 키트를 조종하기위해서, CM-550과 엔지니어 키트앱의 무선연결이 필요합니다. 엔지니어 키트1의 블루투스 연결하기를 따라하세요.
MAX-E2
ROBOTIS ENGINEER 앱을 실행하고, 화면에서 MAX-E2를 선택하세요.
MAX-E2 조종 화면
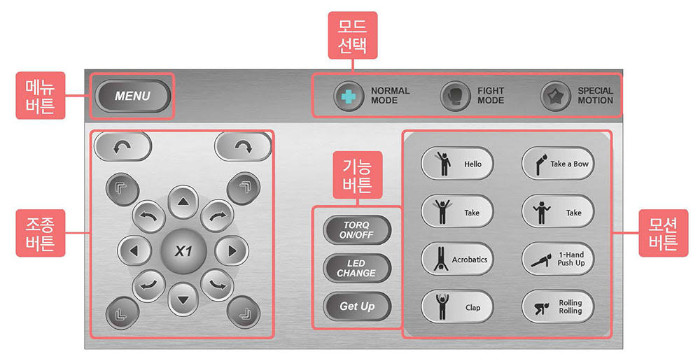
메뉴 버튼: 조종 / 스트리밍 / 얼굴 감지 / 로봇 점검 모드 등을 선택해 변경할 수 있습니다
조종 버튼: MAX-E2를 조종하기 위한 버튼과 동작의 속도를 변경하는 버튼이 배치되어 있습니다.
모드 선택: NORMAL / FIGHT / SPECIAL 등의 조종 모드를 변경할 수 있습니다.
모션 버튼: 선택한 조종 모드에 따라 적합한 다양한 모션 동작들이 각각 설정되어 있습니다.
기능 버튼: 전체 토크 설정 / LED 보드 색상 변경 / 로봇 일어나기 등의 기능이 설정되어 있습니다.
참고:
- TORQ ON/OFF 버튼을 길게 누르면 전체 다이나믹셀의 토크가 풀리면서 리부트 됩니다.
- 스트리밍 사용방법은 앱에서 영상 스트리밍 기능 설정하기 참조하세요.
MAX-E2 모드 메뉴
| 아이콘 | 모드 설명 |
|---|---|
| REMOTE : 조종 모드 MAX-E2 로봇을 조종하는 모드이며 FIGHT, SOCCER 등의 모드 변경을 통해 MAX-E2를 다양한 모션으로 조종할 수 있습니다. |
|
| STREAMING : 스트리밍 모드 Raspberry Pi 카메라를 활용해 전송되는 영상을 스마트 기기의 화면으로 보면서 버튼을 눌러 로봇을 조종할 수 있습니다. |
|
| FACE : 얼굴 감지 모드 라즈베리파이 카메라를 활용해 얼굴을 감지하는 모드로 얼굴을 감지하면 인사 등의 지정된 동작을 수행합니다. |
MAX-E2 옵션메뉴
| 아이콘 | 옵션 설명 |
|---|---|
| MOTOR : 모터 점검 로봇의 다이나믹셀 상태를 각각 테스트해 볼 수 있는 메뉴입니다. |
|
| OFFSET : 모션 오프셋 모션 동작시 각 관절의 기본 위치를 설정하는 기능입니다. |
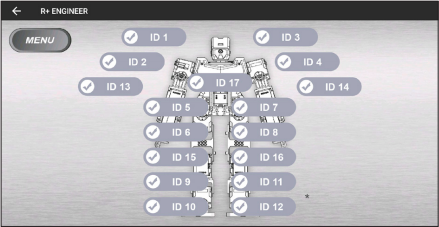
모터 점검 실행 화면
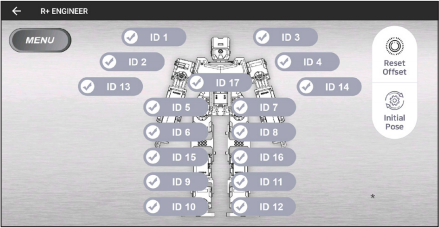
모션 오프셋 실행 화면
참고 : 옵션 메뉴는 모든 예제에 포함되어 있으며 세부 설정 방법은 로봇 설정하기를 참고하세요.
Commando
ROBOTIS ENGINEER 앱을 실행하고, 화면에서 Commando를 선택하세요.
Commando 데모 화면
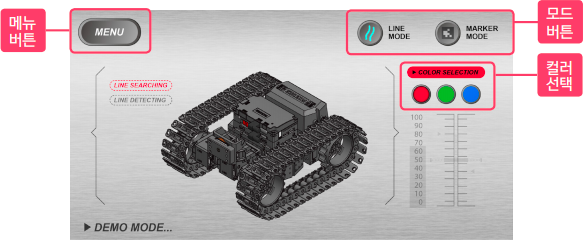
메뉴 버튼 : 데모 / 조종 / 스트리밍 / 로봇 점검 모드 등을 선택해 변경할 수 있습니다.
모드 버튼 : 전/후/좌/우 이동 및 속도 설정 버튼으로 로봇을 조종할 수 있습니다
LINE MODE를 선택하면 Raspberry Pi Camera를 사용해 설정된 색의 라인을 인식하고 이동합니다.COLOR SELECTION에서 인식할 라인 색을 선택합니다MARKER MODE를 선택하면 Raspberry Pi Camera를 사용해 마커를 순서대로 인식한 후START 마커를 사용해 인식한 마커의 순서에 따라 명령대로 이동합니다. Marker Mode 에서DEBUGGING MODE는 동작 사이에 지연 시간이 발생해 동작을 구분할 수 있습니다.RUN MODE는 지연시간 없이 동작과 동작을 연결해서 이동합니다.
참고:
- 스트리밍 사용방법은 앱에서 영상 스트리밍 기능 설정하기 참조하세요.
- 마커는 카메라에서 30 CM 이상 떨어진 거리에서 인식시켜야 인식이 잘됩니다.
Commando 옵션메뉴
![]()
REMOTE : 조종 모드
Commando 로봇을 조종하는 모드이며 로봇의 이동 및 방향 전환, 카메라 등을 제어하는 명령을 사용할 수 있습니다. 조종모드에서 WHEEL SPEED(바퀴 속도)를 조정하면 로봇의 이동속도를 변경할 수 있습니다
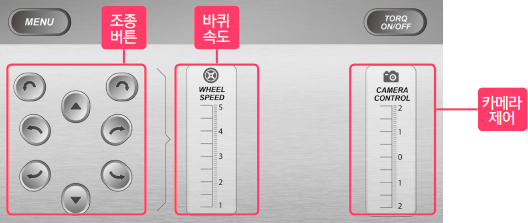
Commando 조종 모드 화면
Scorpi
ROBOTIS ENGINEER 앱을 실행하고, 화면에서 Scorpi를 선택하세요.
Scorpi 데모 화면 소개
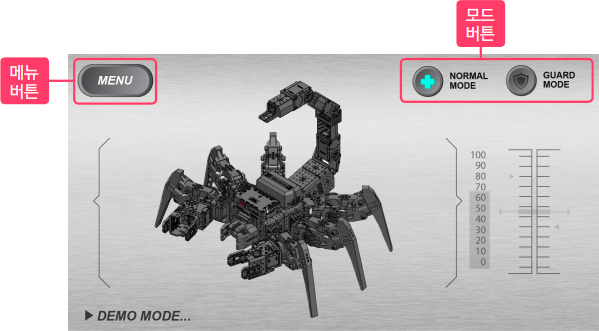
메뉴 버튼 : 조종 / 제스처 / 데모 / 로봇 점검 모드 등을 선택할 수 있습니다.
모드 버튼 :
NORMAL MODE를 선택하면 Scorpi 로봇이 일어나 동작하고, 절대거리센서 DMS-80에 물체가 감지되면 꼬리를 움직여 공격합니다.GUARD MODE를 선택하면 Scorpi 로봇이 제자리에서 경계 자세를 취하며, 절대거리센서 DMS-80에 물체가 감지되면 꼬리를 움직여 공격합니다.
Scorpi 메뉴 기능 소개
| 아이콘 | 메뉴 설명 |
|---|---|
| REMOTE : 조종 모드 Scorpi 로봇을 조종하는 모드이며 로봇의 이동 및 방향 전환, 속도 변경과 로봇의 꼬리 및 집게를 사용하는 다양한 모션들을 동작시킬 수 있습니다. |
|
| GESTURE : 제스처 모드 스마트기기의 기울기, 흔들림 센서 등을 사용해 기기를 기울이거나 특정 동작을 통해 Scorpi 로봇의 이동 및 공격 등의 명령을 수행합니다. |

조종 모드 화면
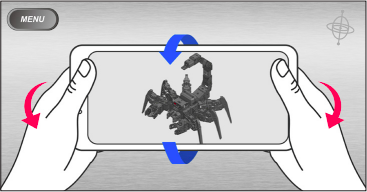
제스쳐 모드 화면