개요
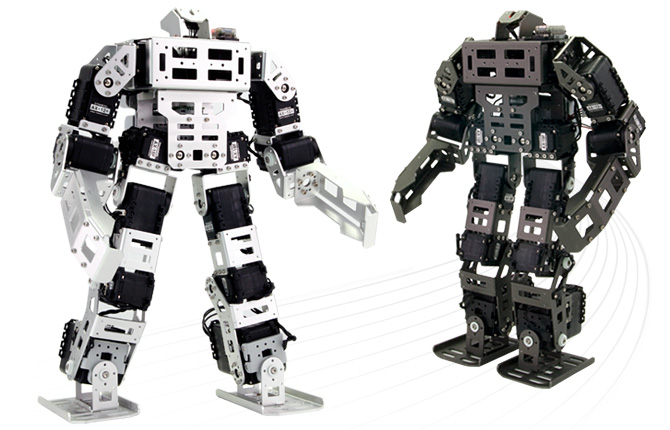
- 고성능 다이나믹셀 AX-18F(하체)가 장착된 최고 성능의 휴머노이드
- 초경량, 고강도의 알루미늄 프레임 적용
- 이동 중 방향전환과 고속 보행 등 뛰어난 운동 성능 보유
- 휴머노이드 격투, 축구 및 다양한 기본 모션 제공
- 자이로 센서를 기반으로 한 자세 보정 기능
- 미션 수행이 가능한 그리퍼 세트 및 센서 기본 포함
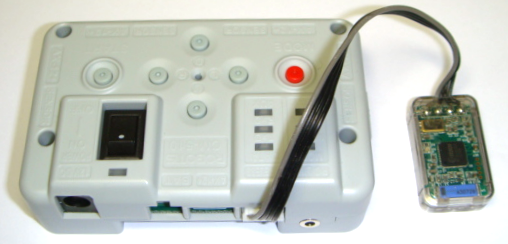
- 무선 리모컨 포함(BT-410 Set 내장)
- 업그레이드된 전용 프로그래밍 소프트웨어 [로보플러스] 제공
- 디지털 패킷통신 제어 및 Daisy Chain 방식의 간단한 배선 정리
시작하기
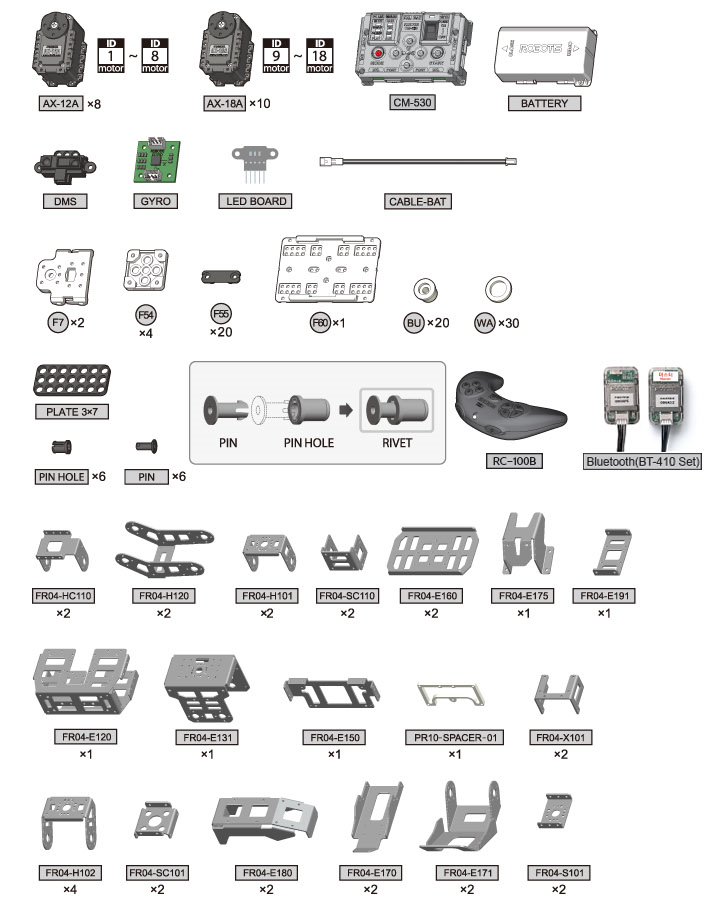
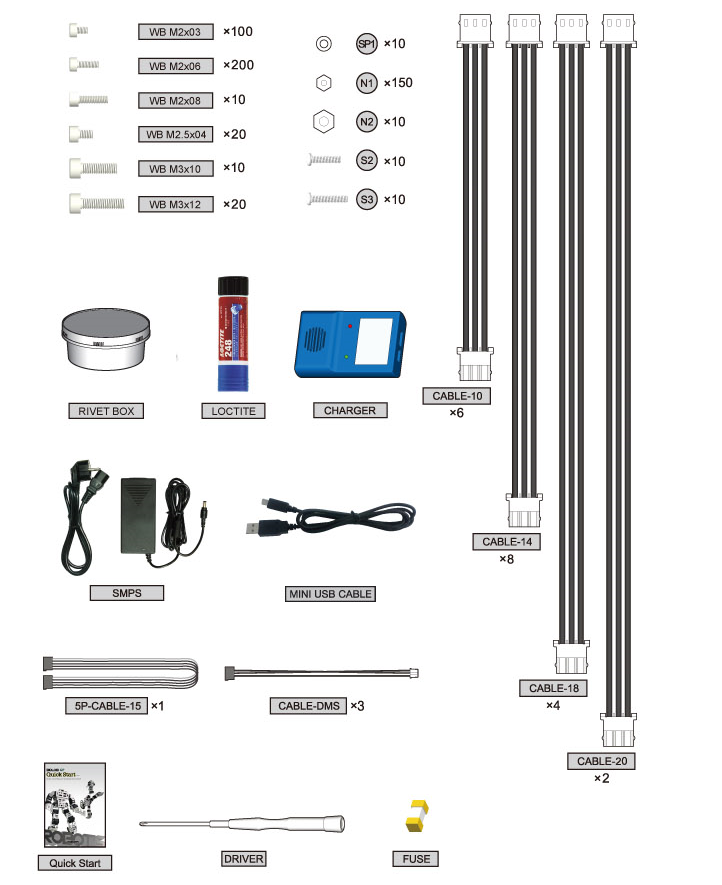
부품 목록
작동하기
프로그램 다운로드
- 제어기에는 최초 출하시 프로그램이 기본적으로 탑재되어 있습니다.
- 기본 프로그램 페이지에서 동작시키고자 하는 타입에 맞는 태스크 코드와 모션 파일을 로봇에 다운로드 합니다.
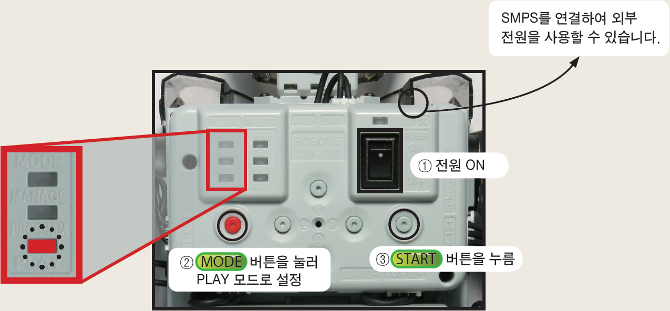
로봇 켜기
- 전원 스위치를 켜면 LED 가 깜빡이며 로봇이 켜집니다.
- MODE 버튼을 눌러 PLAY 에서 LED 가 깜빡이도록 합니다. (MODE 버튼을 누를 때마다 LED 가 이동합니다.)
- START 버튼을 누릅니다. (PLAY 에서 LED 가 깜빡이지 않고 계속 켜져 있는지 확인하세요.)
- LED 가 켜지지 않으면 전원 케이블이 제대로 연결되어 있는지 확인합니다.
- 이상이 없으면 배터리를 충전하세요. (충전하기 참조)
로봇의 전원이 켜지지 않습니다.
- 배터리가 제대로 연결되어 있나요?
- 배터리가 충전되어 있나요?
- 퓨즈가 끊어지진 않았나요?
- 퓨즈 교체하기를 참조하세요.
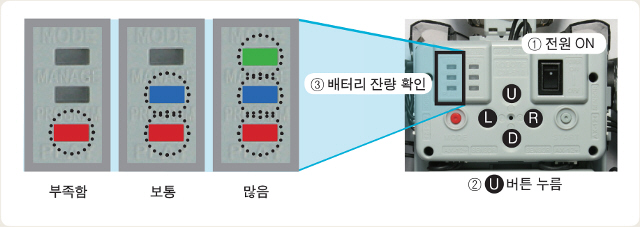
배터리 잔량을 확인하고 싶어요.
CM-530 의 전원을 켠 후 U 버튼을 누르면 LED 가 켜지는 갯수로 배터리 잔량을 확인할 수 있습니다.
{kind=link}
로봇 작동 중 경고음 “삐리삐리~” 소리가 연속해서 들립니다.
- 배터리를 거의 소모하였습니다. 즉시 배터리를 충전하세요. (충전하기 참조)
- 충전하지 않고 계속 로봇을 작동시키면, 잠시 후 로봇의 전원이 갑자기 꺼지면서 로봇에 충격이 갈 수 있으므로 주의하세요.
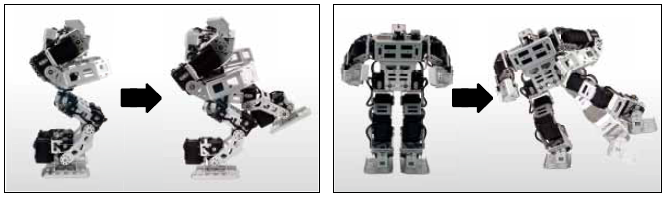
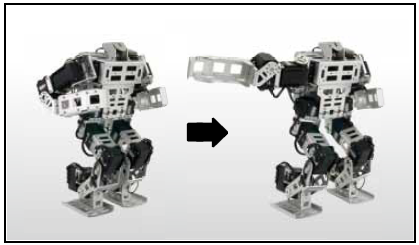
로봇의 기본 자세 확인하기(올바르게 조립되었는지 확인)
-
로봇이 아래와 같이 기본 자세를 취합니다.
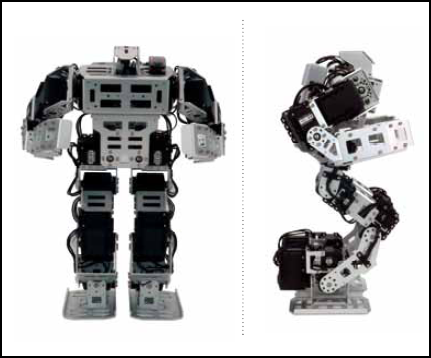
- 팔과 다리의 각도를 확인합니다. 만약 그림과 다르다면, 아래 로봇 작동하기의 조립 확인 모드에서 로봇의 조립 상태를 확인하세요.
- 케이블이 다리 바깥으로 연결되었는지 확인하세요.
참고: 로봇에 손상을 줄 정도로 심각하게 조립이 잘못 되었을 경우, 경고음이 울립니다. 이와 동시에 문제가 있는 모터의 힘이 풀리며 LED 가 켜집니다. 이는 로봇의 손상을 막기 위한 안전장치가 작동하는 것입니다.
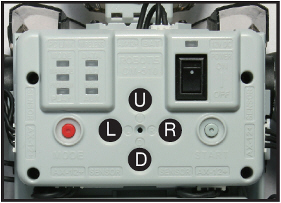
로봇 조종하기
- 로봇을 켜고 PLAY 모드를 실행 한 후, R / D / L / U 버튼을 누르면 다음 모드가 실행 됩니다.
- U : 축구 모드
- D : 격투 모드
-
L or R : 퍼포먼스 모드
참고: 기본적으로 로봇은 리모컨(RC-100)으로 조종합니다. 모드 선택없이 리모컨으로 동작시키면 축구 모드가 자동선택 됩니다.
리모컨(RC-100) 작동 방법
- POWER/MODE 버튼을 1초 이상 누르면 전원이 켜집니다.
- 리모컨의 버튼을 눌러 로봇을 조종합니다.

보행 (방향 버튼 : U / L / D / R)
| Buttons | Motion | Buttons | Motion |
|---|---|---|---|
| U | 앞으로 가기 | D | 뒤로 가기 |
| L | 왼쪽으로 회전 | R | 오른쪽으로 회전 |
| U + L | 전진하며 왼쪽으로 회전 | U + R | 전진하며 오른쪽으로 회전 |
| L + 5 | 좌 이동 | L + 5 + 6 | 빠른 좌 이동 |
| L + U + 5 | 좌 이동하며 앞으로 | L + D + 5 | 좌 이동하며 뒤로 |
| R + 5 | 우 이동 | R + 5 + 6 | 빠른 우 이동 |
| R + U + 5 | 우 이동하며 앞으로 | 우 이동하며 앞으로 | 우 이동 하며 뒤로 |
기본 (키 + 키)
| Buttons | Motion | Buttons | Motion |
|---|---|---|---|
| 1 + U | 앞으로 일어나기 | 1 + D | 뒤로 일어나기 |
| 5+6+U+1 | 축구 모드(모드변환) | 5+6+D+3 | 격투 모드(모드변환) |
| 5+6+L+2 | 퍼포먼스 모드(모드변환) | - | - |

U : 축구 모드
- 슛 ( 키 + 키)
| Buttons | Motion | Buttons | Motion |
|---|---|---|---|
| 2 + U | 왼발 전방 슛 | 4 + U | 오른발 전방 슛 |
| 2 + D | 왼발 후방 슛 | 4 + D | 오른발 후방 슛 |
| 2 + L | 왼발 좌슛 | 4 + L | 오른발 좌슛 |
| 2 + R | 왼발 우슛 | 4 + R | 오른발 우슛 |
- 수비 ( 키 + 키)
| Buttons | Motion | Buttons | Motion |
|---|---|---|---|
| 3 | 막기 준비 | 3 + U | 제자리 막기 |
| 3 + L | 좌측 공 막기 | 3 + R | 우측 공 막기 |
D : 격투 모드
- 공격 및 방어 (키 + 키)
| Buttons | Motion | Buttons | Motion |
|---|---|---|---|
| 2 + U | 전방공격 | 3 | 방어자세 |
| 2 + L | 좌공격 | 2 + R | 우공격 |
| 4 + U | 상몸던지기공격 | 4 + D | 하몸던지기공격 |
| 4 + L | 좌강공격 | 4 + R | 우강공격 |
L or R : 퍼포먼스 모드
- 퍼포먼스 (키 + 키)
| Buttons | Motion | Buttons | Motion |
|---|---|---|---|
| 2 + U | 인사 | 2 + R | 물구나무 |
| 2 + D | 박수(2번) | 3 + U | 옆구르기 |
| 2 + L | 박수(337) | 3 + D | 팔굽혀펴기 |
- 조종모드에서 제어기에 IR수신기를 장착하고 RC-100으로 조종할 때, 제어기의 Aux 버튼을 눌러 다음과 같이 리모콘의 채널을 설정할 수 있습니다. 채널을 바꾸면, RC-100의 채널도 같이 바꿔 주어야 합니다. RC-100의 채널 변경은 RC-100의 채널 변경 방법을 참고하세요.
CM-510 IR 채널 설정 (Start + U, L, D, R )
| Buttons | Motion |
|---|---|
| Start + U | RC-100 채널 1로 설정 |
| Start + L | RC-100 채널 2로 설정 |
| Start + D | RC-100 채널 3로 설정 |
| Start + R | RC-100 채널 4로 설정 |
리모컨 조종이 잘 되지 않습니다.
- 리모컨 조종 모드로 설정하세요.
- 조립서를 보고 적외선 수신기가 제대로 연결되었는지 확인하세요.
- 리모컨의 전원이 켜져 있는지 확인하세요. 만약 전원이 켜지지 않는다면 배터리를 교체해 주세요.
- 적외선 수신기를 향해 리모컨을 조종하세요.
- 주위에 로봇을 조종하는 사람이 있지 않나요? (무선 혼선이 생길 수 있습니다.)
여러 대의 로봇으로 축구 경기나 로봇 격투를 하고 싶어요.
- 여러 대의 로봇을 혼선 없이 안정적으로 조종하려면 지그비 무선 모듈(ZIG-110 세트)을 장착해야 합니다.
BT-410 사용자는 BT-410 e-Manual을 참조해주세요.
충전하기
STEM 키트는 리튬폴리머로도 작동할 수 있으며, 쇼핑몰(http://www.robotis.com/shop/) 에서 별도로 구매합니다.
로봇 작동 중 배터리 경고음이 울리면, 배터리를 충전합니다.
충전이 시작되면 충전기의 붉은색 LED가 깜빡입니다. 충전이 완료되면 녹색 LED가 켜집니다.
-
배터리 분리
-
충전기 연결

-
충전
충전중(붉은색 LED), 충전완료(녹색 LED)

-
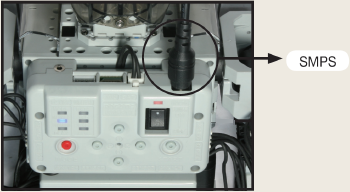
SMPS 를 로봇에 직접 연결하면 외부 전원으로 로봇을 구동할 수도 있습니다.
-
배터리에는 충전용 커넥터와 로봇 작동용 커넥터가 연결되어 있습니다.

충전 시간
- 완전 방전시 충전 시간 : 1시간 ~ 1시간 30분
- 완전 방전 상태에서 너무 오랜시간 충전하지 않으면 충전지의 수명이 급격히 짧아질 수 있습니다.
- 충전지의 상태에 따라 충전 시간이 다를 수 있습니다.(충전 및 동작 시간이 너무 짧다면 충전지의 수명이 다 되었을 수 있습니다.)
보관시 주의사항
- 배터리를 충전기나 로봇에 연결된 상태로 보관하지 마세요.
- 오랫동안 사용 안할시 절반정도 충전된 상태로 보관해 주세요.
- 온도나 습도가 높은 곳에 보관하지 마세요.
튜토리얼
화면 출력하기
-
학습 목표: 화면에 1과 2를 출력합니다.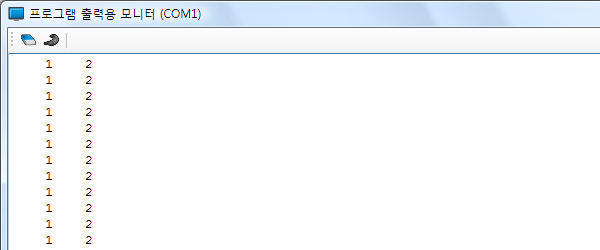
태스크 코드 작성
-
로보플러스 태스크 프로그램 실행
아래 그림에서와 같이 윈도우에서 “시작 > 모든 프로그램 > ROBOTIS > RoboPlus > Software > RoboPlus Task” 를 선택하면 로보플러스 태스크 가 실행됩니다.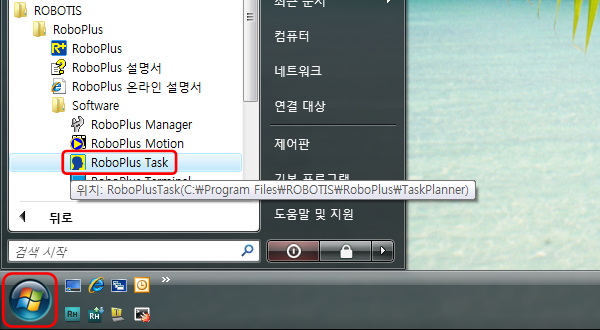
-
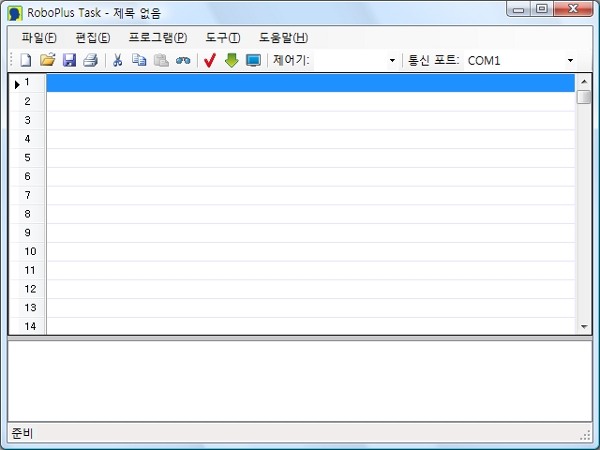
로보플러스 태스크 초기 화면
-
-
제어기 선택
빈 줄을 선택한 후 더블클릭 하거나 Enter 키를 누르면 제어기 선택 대화창이 나타납니다. 자신의 제어기를 선택한 후 확인 버튼을 누릅니다.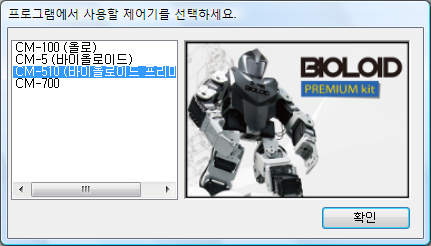
-
프로그램 시작 만들기
제어기 선택 창에 이어서 뜨는 명령어 종류 선택 창에서 ‘프로그램 시작’을 선택하면 RoboPlus Task 에 프로그램 시작 이 만들어 집니다.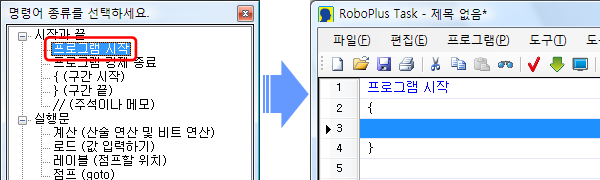
-
무조건 반복 명령어 입력
숫자를 반복하여 화면에 출력하기 위하여 무조건 반복 명령어를 사용합니다. (명령줄 만들기)
프로그램 시작의 { 와 } 사이 구간의 빈 줄을 더블클릭 하거나 선택 후 Enter 키를 누르면 명령어 종류 선택 창이 뜹니다. 명령어 종류 중 “반복문 > 무조건 반복 (while(1))” 을 선택합니다.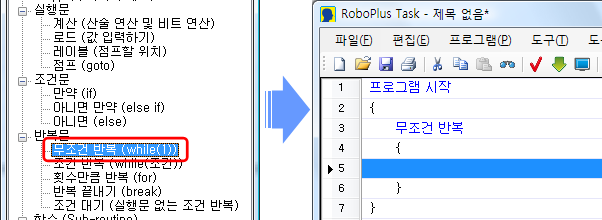
-
로드 명령어 입력
화면에 출력할 값을 화면 출력 으로 입력하기 위해 로드 명령어를 사용합니다. 무조건 반복의 { 와 } 사이 구간의 빈 줄에 “실행문 > 로드 (값 입력하기)” 를 선택하여 입력합니다.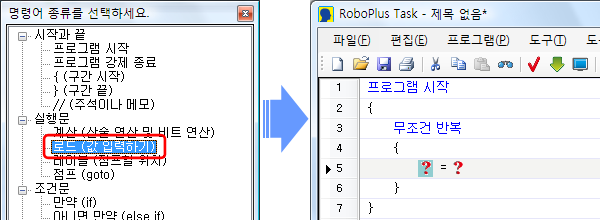
-
숫자 1 을 화면 출력 으로 로드
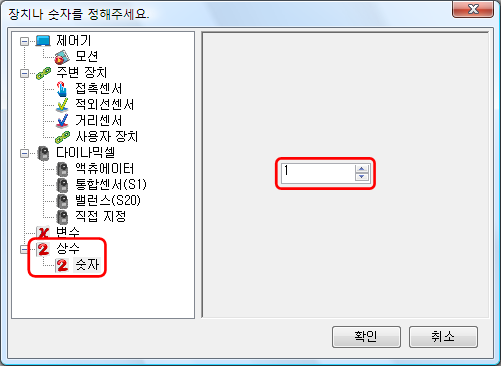
로드 명령어의 파라미터 중 좌측 파라미터( ? )를 선택합니다. (파라미터에 대한 설명)
좌측 파라미터는 우측 파라미터 값을 입력할 곳입니다. 좌측 파라미터 ?를 더블클릭 하거나 클릭 후 Enter 키를 누르면 아래와 같은 파라미터 선택 창이 뜹니다.
제어기 > 화면 출력 을 선택하고 확인 버튼을 누릅니다.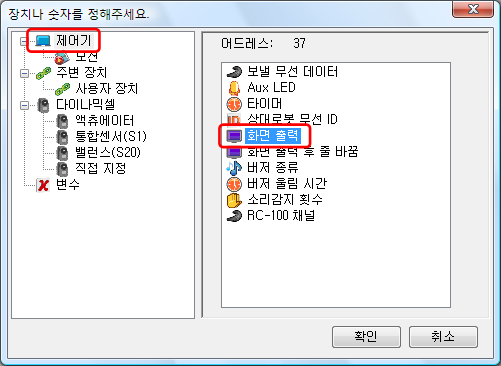
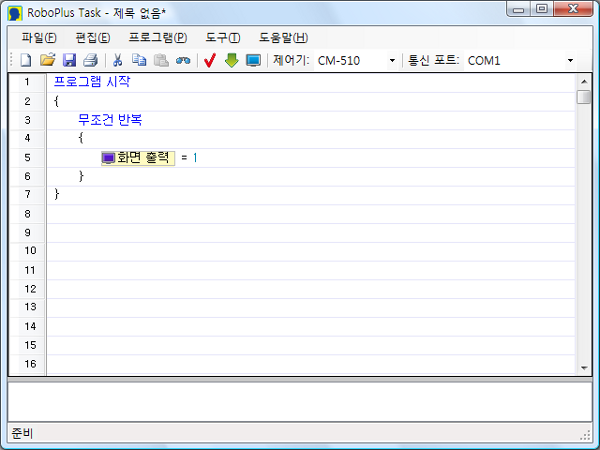
같은 방법으로 우측 파라미터 ? 에는 상수 > 숫자 > 1 을 입력합니다.
로드 명령어의 파라미터를 모두 입력한 화면은 아래와 같습니다.
-
숫자 2 를 화면 출력 후 줄 바꿈 으로 로드
화면 출력 아래의 } (무조건 반복의 구간 끝)를 선택하고 스페이스(Space) 키를 눌러 빈 줄을 추가한 후 위 5. ~ 6. 에서와 동일한 방법으로 로드 명령어를 추가하고, 이번에는 “제어기 > 화면 출력 후 줄 바꿈” 에 상수 숫자 2 를 로드합니다. 최종 완성된 태스크 코드는 아래와 같습니다.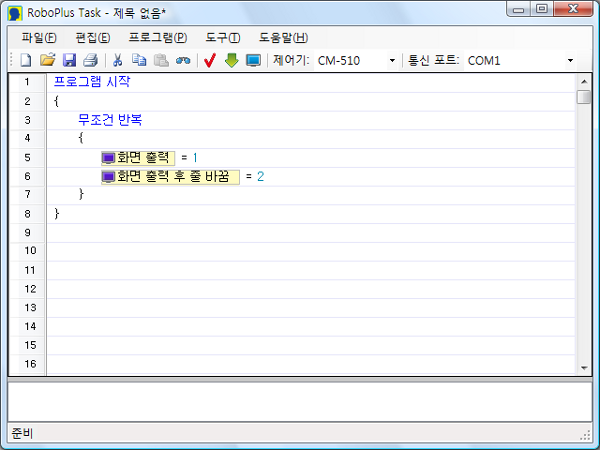
-
태스크 코드 저장 하기
Ctrl + S 를 누르거나 도구 모음의 저장 버튼을 눌러 저장합니다.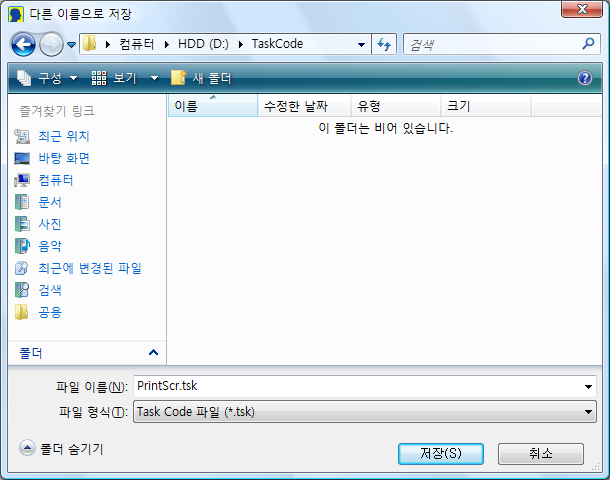
태스크 코드 다운로드
- 태스크 코드 작성 에서 작성한 태스크 코드를 제어기에 다운로드 합니다. (태스크 코드 다운로드 방법)
실행 및 결과 확인
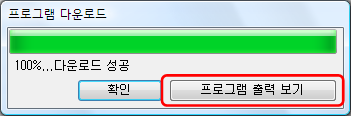
- 프로그램 출력용 모니터 창 띄우기
프로그램 실행 시 화면 출력을 보기 위해서는 반드시 프로그램 실행 전에 프로그램 출력용 모니터 창을 띄워야 합니다. 프로그램 출력용 모니터 창을 띄우는 방법은 아래와 같이 여러 가지가 있습니다.-
프로그램 다운로드 창에서 프로그램 출력 보기 버튼을 클릭
- 도구 모음에서 프로그램 출력 보기 버튼을 클릭
- 프로그램(P) 메뉴의 프로그램 출력 보기(V) 메뉴 선택 혹은 단축키 F5
-
- 프로그램 실행하기
제어기 전원 스위치를 켜면 모드 LED 가 깜빡이고 있는 대기 상태가 됩니다. 이 때 모드(MODE) 버튼을 눌러 모드 LED 가 PLAY 에 위치하도록 한 후 시작(START) 버튼을 누르면 다운로드 한 태스크 코드가 실행됩니다. 프로그램 출력용 모니터에 숫자 1 과 2 가 출력되는 것을 확인합니다.
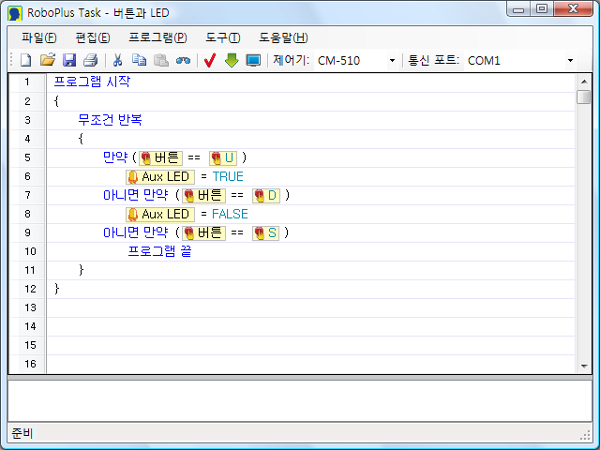
버튼과 LED
학습 목표:U버튼을 누르면 AUX LED 가 켜지고,D버튼을 누르면 AUX LED 가 꺼지게 합니다.START버튼을 누르면 종료됩니다.
태스크 코드 작성
태스크 코드 다운로드
작성한 태스크 코드를 제어기에 다운로드 합니다. (태스크 코드 다운로드 방법)
실행 및 결과 확인
제어기에 다운받은 프로그램을 실행하고 U 버튼을 누르면 AUX LED 가 켜지고, D 버튼을 누르면 LED 가 꺼지는 것을 확인합니다. START 버튼을 눌러 종료합니다.
다운로드
기본 프로그램
| 파일 종류 | 다운로드 |
|---|---|
| 휴머노이드 기본 태스크 코드 | Download |
| 휴머노이드 기본 모션 파일 | Download |
| 조립서 PDF 파일 | Download |
참고자료
퓨즈 교체하기
CM-510/530 에는 과전류가 흘러서 회로가 망가지는 것을 방지하기 위한 퓨즈(Fuse)가 있습니다.
만약 CM-510/530 이 배터리로는 전원이 켜지지 않고 SMPS로만 전원이 켜진다면 퓨즈가 끊어진 것이니 교체해 주어야 합니다.
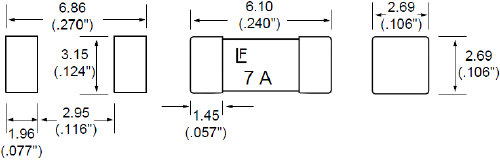
CM-510/ CM530 의 퓨즈 사이즈는 아래와 같으며, 용량은 125V / 5A ~ 10A 사이의 제품을 사용하시면 됩니다.
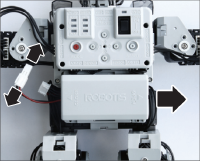
퓨즈의 교체 방법
-
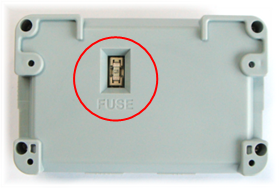
CM-510/530 뒷면의 퓨즈를 확인한다.
-
핀셋 등으로 퓨즈를 새 것으로 교체한다.

다이나믹셀 관리하기
참고자료
퓨즈 교체하기
CM-510/530 에는 과전류가 흘러서 회로가 망가지는 것을 방지하기 위한 퓨즈(Fuse)가 있습니다.
만약 CM-510/530 이 배터리로는 전원이 켜지지 않고 SMPS로만 전원이 켜진다면 퓨즈가 끊어진 것이니 교체해 주어야 합니다.
CM-510/ CM530 의 퓨즈 사이즈는 아래와 같으며, 용량은 125V / 5A ~ 10A 사이의 제품을 사용하시면 됩니다.
퓨즈의 교체 방법
-
CM-510/530 뒷면의 퓨즈를 확인한다.
-
핀셋 등으로 퓨즈를 새 것으로 교체한다.
다이나믹셀 관리하기
로봇 관절로 사용되는 다이나믹셀은 매우 많은 기능들을 내장하고 있습니다. 여기서는 로봇을 만들면서 다이나믹셀의 설정을 바꾸는 방법에 대해 설명합니다.
ID바꾸기
다이나믹셀의 ID는 다음과 같이 변경할 수 있습니다.
- 제어기가 연결된 포트를 설정합니다.
-
연결 버튼을 누릅니다.

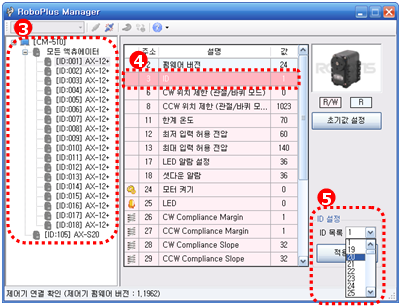
- 왼쪽에서 연결된 다이나믹셀의 리스트를 확인할 수 있습니다. ID를 바꾸려는 다이나믹셀을 클릭합니다.
- 컨트롤 테이블의 ID 열을 클릭합니다.
-
ID 목록 콤보박스를 클릭하면 현재 바꿀 수 있는 다이나믹셀의 ID를 볼 수 있습니다. 바꾸고자 하는 ID를 선택하고 적용 버튼을 누르십시오.
ID변경시 유의사항
- RoboPlus Motion과 로보플러스 태스크에서 사용하기 위해서는 ID의 범위를 다음과 같은 범위 내로 설정해야 합니다.
- 액츄에이터는 0~25 사이의 ID로 설정해야 합니다.
- AX-S1은 100~109 사이의 ID로 설정해야 합니다.
동작 모드 변경
다이나믹셀은 아래와 같은 2 가지 모드로 동작할 수 있습니다.
- 바퀴 모드 : 일반 모터와 같이 360도 회전하는 모드 (무한 회전 모드)
- 관절 모드 : 일반적인 서보 모터와 같이 0도 ~ 300도 사이의 정해진 각도로 움직이는 모드
모드 변경 방법은 아래와 같이 RoboPlus Manager 를 통해 변경할 수 있으며, 한 번 모드를 설정하면 전원을 차단해도 설정값이 유지됩니다.
- 제어기가 연결된 포트를 설정합니다.
-
연결 버튼을 누릅니다.

- 왼쪽에서 연결된 다이나믹셀의 리스트를 확인할 수 있습니다. 모드를 변경하려는 다이나믹셀을 클릭하고, 컨트롤 테이블의 CW/CCW 위치 제한 열을 클릭합니다.
-
바퀴 모드를 설정하려면 CW/CCW 위치 제한 컨트롤 테이블의 값을 모두 0으로 변경하면 됩니다. 다음과 같이 바퀴 모드 버튼을 클릭하여 쉽게 설정할 수도 있습니다.
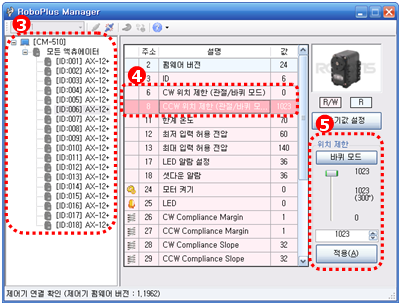
- 다시 관절 모드로 설정하려면, CW/CCW 위치 제한 컨트롤 테이블 값을 0 이외의 값으로 설정하면 됩니다. 관절 모드 기본값은 CW 위치 제한 : 0, CCW 위치 제한 1023입니다.
문제 해결
RoboPlus Manager에서 다이나믹셀을 찾을 수 없는 경우가 발생합니다. 이런 경우는 다음과 같이 시도해보세요.
- 다이나믹셀을 1개만 연결해서 ID가 중복되는지 확인해보세요.
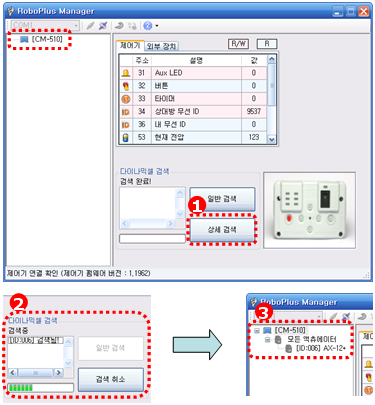
1개만 연결했을 때 왼쪽 리스트에 다이나믹셀이 보이면 ID가 중복될 가능성이 큽니다. ID 변경하기를 통해 ID를 바꿔 주시기 바랍니다. - 만약 다음 그림과 같이 리스트에서 다이나믹셀을 확인할 수 없다면 상세 검색 버튼을 누르시기 바랍니다.
상세 검색 기능은 다이나믹셀의 통신 속도가 1Mbps로 설정되어 있지 않은 경우, 속도를 1Mbps로 재설정하며 제어기에서 인식할 수 있도록 해 줍니다.
위와 같은 방법으로도 문제가 해결되지 않는다면, 다이나믹셀이 고장이 났을 가능성이 높습니다. 구입처에 A/S를 의뢰하시기 바랍니다.
지그비 무선 조종

ZIG-100/110은 로봇용 무선 통신 장치로서 ZIGBee 방식을 사용합니다. ZIGBee 는 Bluetooth 와 같이 PAN(Personal Area Network) 통신에 많이 사용되는 통신 기술입니다. 적외선 방식에 비해서 통신 품질이 매우 좋고, 여러 명이 동시에 조종하여도 각자 자신의 로봇을 조종할 수 있는 장점이 있습니다.
구매한 제품에 지그비 모듈이 포함되지 않을 수 있습니다. 이 경우에는 별도로 구매해야 합니다. BT-210 또는 BT-410 사용자는 관련 e-Manual을 참조하세요.
제어기와 지그비
RC-100 을 이용한 올로와 바이올로이드의 조종은 기본적으로 적외선 방식의 무선 통신을 이용하도록 되어 있습니다. 이것을 ZIGBee 방식의 무선 통신을 이용하도록 하기 위해서는 ZIG-110 set 를 별도로 구매하여 RC-100 에 ZIG-100 을 장착하고, 제어기에 ZIG-110 을 장착해야 합니다. (자세한 장착 방법은 각 부품의 설명 페이지를 참고하세요.)
지그비 셋트는 제품 출하시 서로 통신이 가능하도록 설정이 맞춰져 있습니다. 만약, 다른 지그비 셋트와 혼용하면 무선 조종이 되지 않으니 섞이지 않도록 주의하시기 바랍니다.
| RC-100 에 ZIG-100 모듈을 장착한 모습 | CM-100 에 ZIG-110 모듈을 장착한 모습 |
|---|---|
 |
 |
| CM-510 에 ZIG-110 모듈을 장착한 모습 | CM-5 에 ZIG-100 모듈을 장착한 모습 |
 |
 |
ZIG-110A Set 장착 방법(GP)
BT-410 사용자는 BT-410 e-Manual을 참조해주세요.


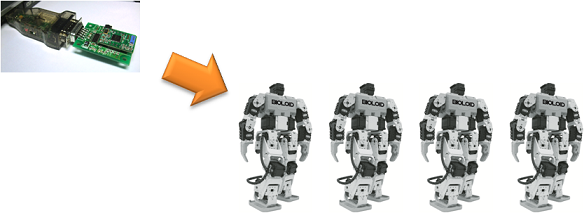
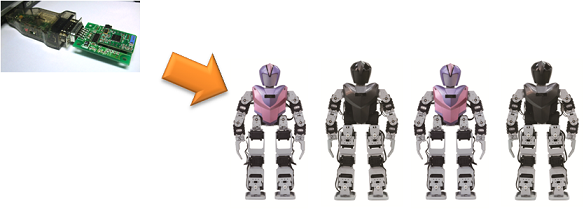
여러 대의 로봇 조종하기
사용자가 댄스나 공연데모를 할 때 여러 대의 로봇에 동시에 명령을 주는 방법입니다. ZIGBEE 모듈의 Broadcast 모드를 이용 하는것으로 로봇에게 동시에 명령을 줄 수 있습니다.
바이올로이드(초급/종합)
Zig2Serial과 다수 로봇과의 통신
RC-100과 다수 로봇과의 통신

- CM-5 제어기를 사용하는 경우에는 제어기와 ZIG-100모듈을 연결합니다.
- 로보플러스 매니저를 통해서 ZIG-100 모듈의 상대 로봇 무선 ID를 65535로 설정 합니다.
- Broadcast 채널을 따로 맞추지 않아도 통신이 가능합니다.
- RC-100을 이용해 직접 명령을 주거나 Zig2Serial을 이용해 PC에서 명령을 줄 수 있습니다.
| 장치 | 채널 기본값습 | 채널 변경가능여부 |
|---|---|---|
| CM-5 | 1 | 변경 불가 |
| Zig2Serial | 1 | 변경 가능 |
| RC-100 | 1 | 변경 가능 |
CM-5에 장착한 ZIG-100모듈의 경우에는 채널 변경이 불가능 합니다. 따라서 사용자는 모두 채널 1번에 맞추셔서 사용 해야 브로드캐스트 통신이 가능합니다. 각 장치 간의 채널이 다르면 통신이 불가능하므로 모든 채널을 일치시켜야 합니다.
STEAMCUP PREMIUM키트 / CM-700
Zig2Serial과 다수 로봇과의 통신
RC-100과 다수 로봇과의 통신

- CM-510/ CM-700 제어기를 사용하는 경우에는 제어기와 ZIG-110 모듈을 연결합니다.
- 로보플러스 매니저를 통해서 상대 로봇 무선 ID를 65535로 설정 합니다.
- 제어기와 연결된 Zig-110의 경우에는 Broadcast 채널이 4번으로 되어 있기 때문에 Zig2Serial , RC-100을 채널 4번으로 맞추셔야 합니다.
- [RC-100 채널 바꾸는 방법 링크가기]
- [Zig2Serial 채널 바꾸는 방법 링크가기]
| 장치 | 채널 기본값습 | 채널 변경가능여부 |
|---|---|---|
| CM-510/CM-530 | 4 | 변경 불가 |
| Zig2Serial | 1 | 변경 가능 |
| RC-100 | 1 | 변경 가능 |
제어기에 연결한 ZIG-110은 채널 변경이 불가능합니다. 따라서 사용자는 모두 채널 4번에 맞추셔서 사용 해야 브로드캐스트 통신이 가능합니다. 각 장치 간의 채널이 다르면 통신이 불가능 하므로 모든 채널을 일치 시켜야 합니다.
센서 추가하기
STEAMCUP PREMIUM 혹은 STEAMCUP GP 에서는 CM-510의 센서연결부를 통해 적외선센서, 접촉 센서, 절대 거리 센서를 추가로 달 수 있습니다.
각 센서에 대한 자세한 정보는 위의 텍스트에 각 센서에 대한 이름을 클릭하시면 해당 페이지로 이동하여 보실 수 있습니다.
적외선 센서

- 적외선 센서 활용방안
- 적외선 센서는 로봇의 앞에 장애물을 감지 할 수 있습니다.
- 로봇이 보행이나 이동 할 때 앞에 있는 물체를 감지 하기 하는 용도 등으로 활용 할 수 있습니다.
접촉 센서
- 접촉 센서 활용 방안
- 접촉 센서는 물체와 로봇이 접촉하는 것을 감지 하는 센서 입니다.
- 예를 들어 사람이 로봇의 접촉 센서를 누르게 되면 로봇에 어떤 행동을 하게 하는 등의 용도 등으로 활용 할 수 있습니다.
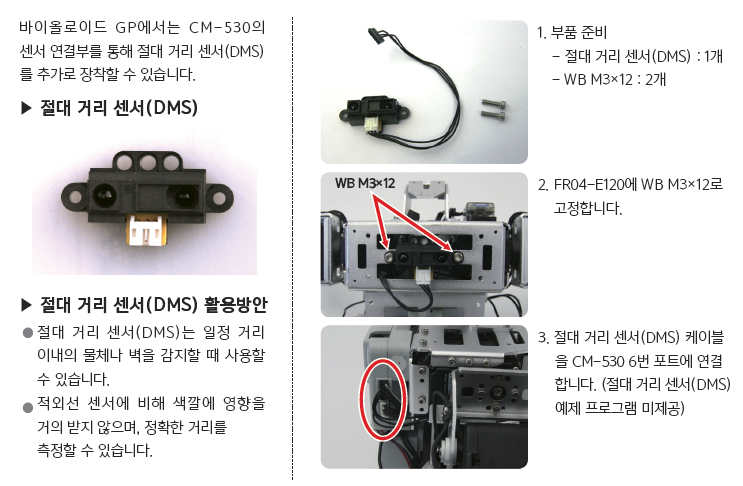
절대 거리 센서(DMS)
사용자 센서 제작
CM-510, CM-530에서는 ADC포트와 OUT포트를 이용하여 간단히 제어가 가능한 사용자 센서를 제작할 수 있습니다.
주의: 만약 잘못된 회로를 구성하여 CM-510의 외부 포트에 사용자 장치를 연결하면 회로가 손상될 수 있으므로, 회로에 대한 지식을 먼저 습득하시기 바랍니다. {: .notice–warning}
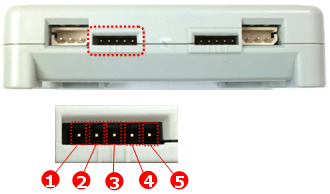
- CM-510의 외부 포트 핀 구성은 다음과 같습니다.
- OUT : 5V 출력 가능
- VCC (5V)
- ADC : 사용자가 제작한 센서의 아날로그 신호를 읽을 수 있음.
- GND
- NC : 사용하지 않음
- CM-530의 외부 포트 핀 구성은 다음과 같습니다.
- OUT1 : 3.3V 출력 가능 (최대 허용 전류 0.3A)
- VCC (5V)
- ADC : 사용자가 제작한 센서의 아날로그 신호를 읽을 수 있음.
- GND
- OUT2 : 3.3V 출력 가능 (최대 허용 전류 0.3A)
참고 : 외부센서 사용시 5핀케이블을 사용해 주세요. 5핀 케이블은 로보티즈 쇼핑몰에서 구매하실 수 있습니다.
사용자 장치 제어
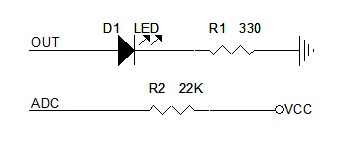
외부 출력 제어
다음과 같은 LED 회로를 구성한다면, 1번 핀을 제어하여 LED를 껐다, 켤 수 있는 장치를 만들 수 있습니다. (제어기종류 및 LED의 종류에 따라 저항의 크기를 조정해야 합니다.)
 RoboPlus Task에서 사용자 장치 OUT 포트에 High신호를 주는 방법은 다음과 같습니다.
RoboPlus Task에서 사용자 장치 OUT 포트에 High신호를 주는 방법은 다음과 같습니다.
- 먼저 로드, 계산 등의 쓰기 가능 파라미터에 사용자 장치를 선택하고, 장치가 연결된 포트를 설정합니다.
- 이 후, 읽기 가능 파라미터에 포트 값 상수를 이용하여 High신호를 설정합니다.
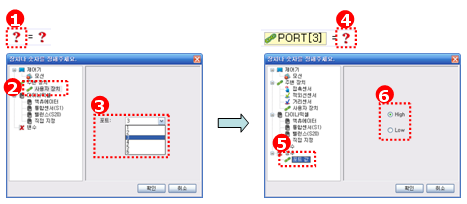

- 위와 같은 코드가 실행되면, PORT3에 연결된 장치의 OUT 포트에 High 신호가 발생하게 되며, 연결된 LED가 켜집니다.
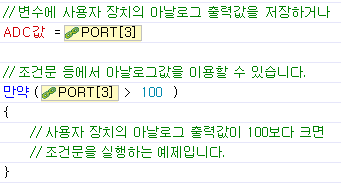
ADC값 읽어오기
로봇에서 센서로 사용되는 IR센서, 거리센서 등 여러가지 장치들은 대부분 아날로그 출력을 지원합니다. 이러한 센서들을 외부포트를 지원하는 제어기에 연결하여 이용할 수 있습니다. 물론, 센서는 사용자가 직접 회로를 제작하여 이용할 수 있으며, 시중에서 판매하는 것을 이용할 수도 있습니다.
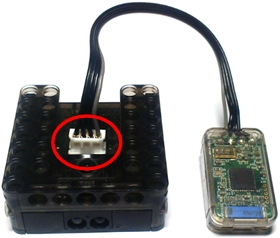
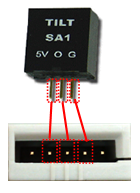
- 다음 그림은 Tilt센서입니다. 5V입력을 받으며, 센서의 기울어짐에 따라 그 값을 아날로그 신호로 출력합니다.

-
Tilt센서의 왼쪽 핀은 5V VCC 입력핀, 가운데 핀은 아날로그 신호 출력핀, 오른쪽은 그라운드핀입니다. CM-510의 외부 포트에 서로 매칭되는 핀을 연결하여 주면 바로 사용할 수 있습니다. CM-510의 외부 포트 핀 정보를 참고하여 다음과 같이 연결하면 됩니 다.
-
다음 예제와 같이 센서의 아날로그 출력값을 읽어와 로봇의 동작에 응용할 수 있습니다.