
Table of Contents
Abstract
This is MicroPython APIs documentation of the ROBOTIS CM-550 controller.
pycm module
Definition
pycm is a module for controlling CM-550 hardware with MicoroPython, and it contains submodules for each function such as pycm.buzzer and pycm.led.
How to use
Example 1
All examples in the e-Manual of pycm use this method similarly.
pycm can be omitted when using its submodules.
# import pycm and all its submodules
from pycm import *
# Turn on Green LED
led.set(const.GREEN)
delay(1000)
Example 2
pycm should be specified when using submodules
# import pycm module only
import pycm
# Turn on Green LED (pycm must be specified before led module)
pycm.led.set(const.GREEN)
delay(1000)
System Functions
delay()
Description
wait for specified length of time (unit : 0.001 sec)
Syntax
- delay(ms)
Parameters
- ms: type: uint32_t, unit: milliseconds
Returns
- None
Example
# wait for 0.8 sec
delay(800)
console()
Description
Configure communication port for print() function
Syntax
- console(port)
Parameters
- port: const.BLE(default port) / const.USB / const.UART
Returns
- None
Example
# print through BLE
console(const.BLE)
# print through USB
console(const.USB)
# print through UART(4 pin port)
console(const.UART)
print()
Description
print number and/or text
Syntax
- print(content)
Parameters
- content: number OR string
Returns
- None
Example
# Change line after print
print('Print with newline')
# Do not change line after print
print('without new line ', end = '')
# print the value of a variable
n = 791
print(n)
# print several values with SPACE between them
print('string', 1024, n)
# print several values without SPACE between them
print('string', 1024, n, sep='')
Submodule of pycm(CM-550)
Unless otherwise specified, the data type of function parameter is integer.
buzzer
buzzer.melody()
Description
play the melody of specified index number
Syntax
- buzzer.melody(index)
Parameters
- index : 0 ~ 25
Returns
- None
Example
- See the example of buzzer.wait()
buzzer.wait()
Description
wait until melody or scale playing is finished
Syntax
- buzzer.wait()
Parameters
- None
Returns
- None
Example
from pycm import *
# play No. 1 melody
buzzer.melody(1)
# wait while the melody is playing
buzzer.wait()
buzzer.note()
Description
play the scale of specified index
Syntax
- buzzer.note(index, ms)
Parameters
-
index : 0 ~ 51
-
ms : 1 ~ 5000 (unit: 0.001 sec)
Returns
- None
Example
from pycm import *
# play No.20 scale for 0.8 sec
buzzer.note(20, 800)
# wait while the scale is playing
buzzer.wait()
led
led.set()
Description
turn on specified LEDs or turn off all LEDs
Syntax
- led.set(leds)
- led.set()
Parameters
- leds : const.RED, const.GREEN, const.BLUE, const.ALL(combination of RED/GREEN/BLUE)
- None : Turn off all LEDs
Returns
- None
Example
from pycm import *
# Turn on Red and Green LED
led.set(const.RED | const.GREEN)
delay(800)
# Turn off all LEDs
led.set()
led.toggle()
Description
toggle the specified LEDs (ON -> OFF, OFF -> ON)
Syntax
- led.toggle(leds)
Parameters
- leds : const.RED, const.GREEN, const.BLUE, const.ALL(combination of RED/GREEN/BLUE)
Returns
- None
Example
from pycm import *
# Toggle Green and Blue LED
led.toggle(const.GREEN | const.BLUE)
delay(800)
# Toggle Green and Blue LED
led.toggle(const.GREEN | const.BLUE)
delay(800)
Constant values for led
- const.RED
- const.GREEN
- const.BLUE
- const.ALL
button
button.pressed()
Description
If START button is pressed or not
Syntax
- button.pressed()
Parameters
- None
Returns
- True on pressed
- False on NOT pressed
Example
from pycm import *
while True:
# GREEN LED on if START button is pressed
# GREEN LED off if not pressed
if button.pressed() == True :
led.set(const.GREEN)
else:
led.set()
button.released()
Description
If START button is pressed then released
Syntax
- button.released()
Parameters
- None
Returns
- True on pressed then released
- False on NOT pressed or pressed but not released
Example
from pycm import *
while True:
# toggle GREEN if START button is pressed then released
if button.released() == True :
led.toggle(const.GREEN)
button.millis()
Description
Number of milliseconds START button was pressed
Syntax
- button.millis()
Parameters
- None
Returns
- milliseconds of START button was pressed
Example
from pycm import *
console(USB)
while True:
if button.released() == True:
ms = button.millis()
print(ms)
button.seconds()
Description
Number of seconds START button was pressed
Syntax
- button.seconds()
Parameters
- None
Returns
- seconds of START button was pressed
Example
from pycm import *
console(USB)
while True:
if button.released() == True:
s = button.seconds()
print(s)
imu
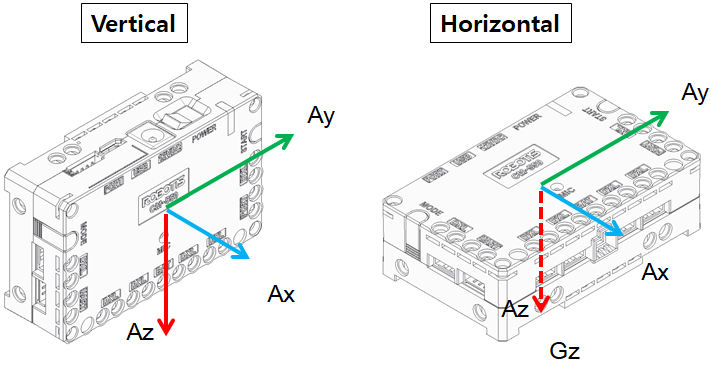
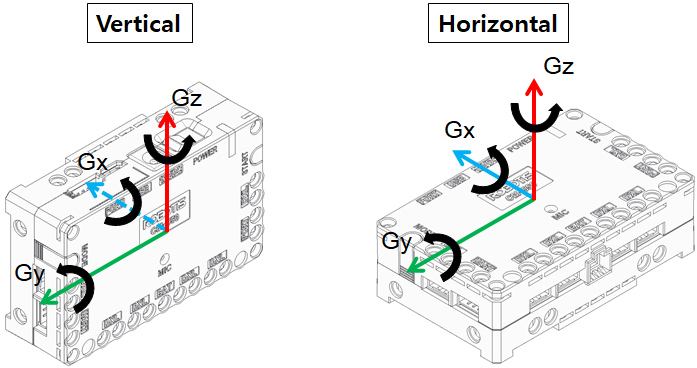
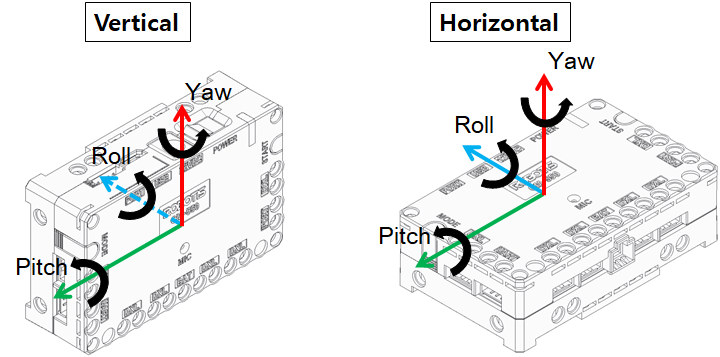
eeprom.imu_type(direction)
Description
- Configures the direction of controller for imu sensing
Syntax
- eeprom.imu_type(direction)
Parameters
-
direction : const.V or const.H
const.V (vertical)
const.H (horizontal)
Returns
- None
Example
from pycm import *
console(USB)
eeprom.imu_type(const.V)
imu.accel_x() / imu.accel_y() / imu.accel_z()
Description
Acceleration value in X/Y/Z-axis
Syntax
- imu.accel_x(), imu.accel_y(), imu.accel_z()
Parameters
- None
Returns
- acceleration value of range -32768 ~ 32767 (unit: 0.001G)
Example
from pycm import *
console(USB)
eeprom.imu_type(const.V)
while True:
ax = imu.accel_x()
ay = imu.accel_y()
az = imu.accel_z()
print(ax, ay, az)
delay(500)
imu.gyro_x() / imu.gyro_y() / imu.gyro_z()
Description
gyroeration value in X/Y/Z-axis
Syntax
- imu.gyro_x(), imu.gyro_y(), imu.gyro_z()
Parameters
- None
Returns
- Gyro value of range -32768 ~ 32767 (unit: 0.01°/s)
Example
from pycm import *
console(USB)
eeprom.imu_type(const.V)
while True:
gx = imu.gyro_x()
gy = imu.gyro_y()
gz = imu.gyro_z()
print(gx, gy, gz)
delay(500)
imu.roll()
Description
roll value
Syntax
- imu.roll()
Parameters
- None
Returns
- roll value of range -18000 ~ 18000 (unit: 0.01°)
Example
from pycm import *
console(USB)
eeprom.imu_type(const.V)
while True:
r = imu.roll()
print(r)
delay(500)
imu.pitch()
Description
pitch value
Syntax
- imu.pitch()
Parameters
- None
Returns
- pitch value of range -9000 ~ 9000 (unit: 0.01°)
Example
from pycm import *
console(USB)
eeprom.imu_type(const.V)
while True:
p = imu.pitch()
print(p)
delay(500)
imu.yaw()
Description
yaw value
Syntax
- imu.yaw()
Parameters
- None
Returns
- yaw value of range -18000 ~ 18000 (unit: 0.01°)
Example
from pycm import *
console(USB)
eeprom.imu_type(const.V)
while True:
y = imu.yaw()
print(y)
delay(500)
mic
mic.counting()
Description
The counting number of clapping sound currently playing continuously
Syntax
- mic.counting()
Parameters
- None
Returns
- 0 : no clapping sound currently (not started or finished)
- N(1~255) : N continuous clapping until now
Example
from pycm import *
console(USB)
while True:
now = mic.counting()
print(now)
delay(600)
mic.counted()
Description
The counting number of previously finished clapping sound
Syntax
- mic.counted()
Parameters
- None
Returns
- 0 : clapping sound not finished or this value is cleared
- N(1~255) : the number of last continuous clapping is N
Example
from pycm import *
console(USB)
while True:
now = mic.counting()
final = mic.counted()
print(now, final)
delay(600)
Result
0 0
0 0
1 0 # clapping started
2 0 # counting() +1
3 0 # counting() +1
4 0 # counting() +1
5 0 # counting() +1
0 5 # clapping stopped, counting() become 0, counted() changed to 5
0 5 # counted() is still 5
mic.clear()
Description
Clear mic.counted() value to 0
Syntax
- mic.clear()
Parameters
- None
Returns
- None
Example
from pycm import *
console(USB)
while True:
if mic.counted() > 0 :
print('final_detect =', mic.counted())
mic.clear()
print('cleared_count =', mic.counted())
Result
final_detect = 3
cleared_count = 0
final_detect = 2
cleared_count = 0
final_detect = 13
cleared_count = 0
final_detect = 10
cleared_count = 0
rc
rc.received()
Description
If a unread remocon packet is available
Syntax
- rc.received()
Parameters
- None
Returns
- True : A remocon packet is arrived but not read by rc.read() function yet
- False : A unread packet is not available.
Example
from pycm import *
while True:
if rc.received() == True:
led.set(CONST.RED)
else:
led.set()
rc.read()
Description
read the value of the last arrived remocon packet
Syntax
- rc.read()
Parameters
- None
Returns
- 0~65535: as a raw number, especially, we can use rc.BTN_X constant to represent RC-100B keys
- rc.BTN_U (1) : Button U of RC-100B remote controller
- rc.BTN_D (2) : Button D of RC-100B remote controller
- rc.BTN_L (4) : Button L of RC-100B remote controller
- rc.BTN_R (8) : Button R of RC-100B remote controller
- rc.BTN_1 (16) : Button 1 of RC-100B remote controller
- rc.BTN_2 (32) : Button 2 of RC-100B remote controller
- rc.BTN_3 (64) : Button 3 of RC-100B remote controller
- rc.BTN_4 (128) : Button 4 of RC-100B remote controller
- rc.BTN_5 (256) : Button 5 of RC-100B remote controller
- rc.BTN_6 (512) : Button 6 of RC-100B remote controller
- OR(|) combination of rc.BTN_X keys
Example
from pycm import *
console(USB)
while True:
if rc.received() == True :
r = rc.read()
print('Receive :')
if r & rc.BTN_U > 0:
print('U key')
if r & rc.BTN_D > 0:
print('D key')
if r & rc.BTN_L > 0:
print('L key')
if r & rc.BTN_R > 0:
print('R key')
Constant values for rc
- rc.BTN_U
- rc.BTN_D
- rc.BTN_L
- rc.BTN_R
- rc.BTN_1
- rc.BTN_2
- rc.BTN_3
- rc.BTN_4
- rc.BTN_5
- rc.BTN_6
motion
motion.wait()
Description
Wait until the currently playing motion is finished
Syntax
- motion.wait()
Parameters
- None
Returns
- None
Example
from pycm import *
motion.play(1)
motion.wait()
led.set(CONST.GREEN)
delay(1000)
motion.play()
Description
play specified motion
Syntax
- motion.play(motion_number)
- motion.play(motion_number, next_motion)
Parameters
- motion_number:
- 0 : Stop motion using an Exit Motion unit.
- 1~65532 : Play motion
- 65533 : Stop motion immediately
- 65534 : Stop motion at the current keyframe
- 65535 : Stop motion at the current motion unit
- next_motion: The motion number that is reserved for smooth play after motion_number motion is finished. But the user should call motion.play(motion_number) to start next_motion motion.
- None : Turn off all LEDs
Returns
- None
Example
from pycm import *
console(USB)
while True:
motion.play(1)
print('play motion 1')
motion.wait()
print('play motion 2\n')
motion.play(2)
motion.wait()
delay(1000)
motion.play(1, 2)
print('play motion 1 (with motion 2 reserved)')
motion.wait()
print('play motion 2\n')
motion.play(2)
motion.wait()
delay(1000)
motion.status()
Description
If any motion is playing currently
Syntax
- motion.status()
Parameters
- None
Returns
- True : A motion is being played now
- False : No motion is being played now
Example
from pycm import *
motion.play(1)
while True:
if motion.status() == True:
led.set(CONST.RED)
else:
led.set()
motion.count()
Description
The number of motions stored in CM-550 controller
Syntax
- motion.count()
Parameters
- None
Returns
- 0~1020
Example
from pycm import *
console(USB)
print(motion.count())
OLLO APIs
OLLO()
Description
Generate an object for the specified 5-pin port with specified 5-pin module type
Syntax
- OLLO(port_num, module_type)
Parameters
| module_type | port_num |
|---|---|
| const.OLLO_WHEEL_SPEED | 1, 2 |
| const.OLLO_JOINT_POSITION | 1, 2 |
| const.OLLO_JOINT_SPEED | 1, 2 |
| const.OLLO_IR | 1, 2 |
| const.OLLO_MOISTURE | 1, 2 |
| const.OLLO_MOISTURE_TEMP | 1, 2 |
| const.OLLO_RED_BRIGHTNESS | 1, 2 |
| const.OLLO_BLUE_BRIGHTNESS | 1, 2 |
| const.OLLO_DMS | 1,2,3,4,5 |
| const.OLLO_TOUCH | 1,2,3,4,5 |
| const.OLLO_LED | 1,2,3,4,5 |
| const.OLLO_USER | 1,2,3,4,5 |
| const.OLLO_TEMPERATURE | 1,2,3,4,5 |
| const.OLLO_MAGNET | 1,2,3,4,5 |
| const.OLLO_MOTION_DETECTION | 1,2,3,4,5 |
| const.OLLO_COLOR | 1,2,3,4,5 |
| const.OLLO_BRIGHTNESS | 1,2,3,4,5 |
Returns
- 5-pin module object
Example
from pycm import *
# object stands for Wheel Motor connected to port 1
wheel_1 = OLLO(1, const.OLLO_WHEEL_SPEED)
# set wheel speed to 500, CCW
wheel_1.write(500)
delay(4000)
object.read()
Description
Read sensing value of specified 5-pin module object
Syntax
- object.read()
Parameters
- None
Returns
| module_type (device link) | Function | Meaning of return value | Range |
|---|---|---|---|
| OLLO_WHEEL_SPEED | read() | Wheel motor speed | [0, 1023] CCW [1024, 2047] CW |
| OLLO_JOINT_POSITION | read() | Servo motor position | [0, 1023] |
| OLLO_JOINT_SPEED | read() | Servo motor speed | [0, 1023] |
| OLLO_IR | read() | IR sensor value | [0, 1023] |
| OLLO_MOISTURE | read() | Relative humidity value | [0, 100] (%) |
| OLLO_MOISTURE_TEMP | read() | Temperature value | [-20, 105] (°C) |
| OLLO_RED_BRIGHTNESS | read() | Red brightness of Red-Blue LED Module | [0, 100] (%) |
| OLLO_BLUE_BRIGHTNESS | read() | Blue brightness of Red-Blue LED Module | [0, 100] (%) |
| OLLO_DMS | read() | DMS sensor value | [0, 1023] |
| OLLO_TOUCH | read() | Tact switch sensor status | 0 : Released 1 : Pushed |
| OLLO_LED | read() | LED module status | 0 : Both OFF 1 : Left OFF, Right ON 2 : Left ON, Right OFF 3 : Both ON |
| OLLO_USER | read() | Analog value of User Device | [0, 1023] |
| OLLO_TEMPERATURE | read() | temperature value | [-20, 105] (°C) |
| OLLO_MAGNET | read() | Magnet sensor status | 0 : No magnet 1 : Magnet detected |
| OLLO_MOTION_DETECTION | read() | Motion sensor status | 0 : No motion 1 : Motion detected |
| OLLO_COLOR | read() | Sensed color index | 0 : Unknown 1 : White 2 : Black 3 : Red 4 : Green 5 : Blue 6 : Yellow |
| OLLO_BRIGHTNESS | read() | Brightness | [0, 1023] |
NOTE: OLLO_MOISTURE, OLLO_MOISTURE_TEMP and OLLO_BRIGHTNESS’s manuals are currently available for Korean instruction only.
Example
from pycm import *
console(USB)
servo_1 = OLLO(1, const.OLLO_JOINT_POSITION)
position = servo_1.read()
print('servo 1 position = ', position)
object.write()
Description
Change 5-pin module object’s parameter
Syntax
- object.write(parameter1, parameter2,…)
Parameters
| module_type (device link) | Function | Meaning of parameter | Range |
|---|---|---|---|
| OLLO_WHEEL_SPEED | write(velocity) | Wheel motor velocity | [0, 1023] CCW [1024, 2047] CW |
| OLLO_JOINT_POSITION | write(position) | Servo motor position | [0, 1023] |
| OLLO_JOINT_SPEED | write(speed) | Servo motor speed for position control | [0, 1023] |
| OLLO_LED | write(left, write) | left : control value for left LED right : control value for right LED |
0 : OFF 1 : ON |
| OLLO_USER | write(out1, out2) | out1 : control value for OUT1 pin out2 : control value for OUT2 pin |
0 : 0V 1 : 5V |
Returns
- None
Example
from pycm import *
ledl_1 = OLLO(1, const.OLLO_LED)
# turn on left LED, turn off right LED
led_1.write(1, 0)
delay(4000)
Constant values for OLLO
- const.OLLO_WHEEL_SPEED
- const.OLLO_JOINT_POSITION
- const.OLLO_JOINT_SPEED
- const.OLLO_IR
- const.OLLO_MOISTURE
- const.OLLO_MOISTURE_TEMP
- const.OLLO_RED_BRIGHTNESS
- const.OLLO_BLUE_BRIGHTNESS
- const.OLLO_DMS
- const.OLLO_TOUCH
- const.OLLO_LED
- const.OLLO_USER
- const.OLLO_TEMPERATURE
- const.OLLO_MAGNET
- const.OLLO_MOTION_DETECTION
- const.OLLO_COLOR
- const.OLLO_BRIGHTNESS