Overview
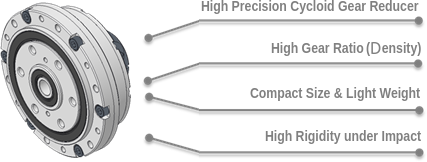
DYNAMIXEL DRIVE (DYD) is a cycloid-based compact reduction gear with superior impact resistance while realizing high torque, high efficiency and light weight.
| Characteristics | DYD | Starain Wave Gear | Planetary Gear |
|---|---|---|---|
| Efficiency | ◎ | △ | ◎ |
| Back-Drive torque | ◯ | △ | ◎ |
| Accuracy (Backlash) | ◎ | ◎ | △ |
| Rigidity under impact (shock) | ◎ | △ | ◯ |
| Operating time to failure under heavy operating condition | ◎ | △ | ◯ |
- ◎: Excellent
- ◯ : Good
- △: Average
PRODUCT CHECK
- Please verify product’s model and number to ensure correct shipment of the product ordered.
- Please verify all components are included in original packaging.
- Please verify to see if there might be any damage on the product’s surface or general appearance.
![]()
WARNING
(May cause injury or damage to product)
- Do not disassemble or reassemble the product. If the product is disassembled and reassembled, the original performance cannot be guaranteed.
- Be careful not to apply a load more than its Permissible peak torque.
- Do not use the product when it is dropped or subjected to strong impact.
- Please familiarize yourself with the contents of the manual before using the product. If the product is operated without correct assembly, it may cause vibration, shortened life, and/or permanent damage.
- Use at an ambient temperature of -5° to 55° degrees Celsius.
- Do not operate the product in an environment exposed to water, oil or explosive gas.
- Exercise caution to the internal components are not exposed to dust and chips.
- High quality oil seals are applied to the input/output shaft, however the product is subject to leakage. Please provide oil protection treatment as needed according to your application.
- This product is coated with anti-rust treatment at the time of shipment, however rust may appear depending on storage and environmental conditions.
- This product is coated with surface treatment, however rust protection is not guaranteed.
- This product is pre-packed with lubricant, do not mix with other lubricants.
- Please follow local government guidelines when disposing of the lubricant.
![]()
CAUTION
- Avoid coming into contact with the lubricant as this may cause irritation when in contact with your skin and eyes.
- In the case your eyes come in contact with the lubricant, wash your eyes immediately with clean water and seek medical advice.
- In the case your skin comes into contact with the lubricant, wash your skin thoroughly with water and soap.
WARRANTY
- This product is covered under warranty for 1 year after purchase or up to 2,000 hours of operational time. (* Product must be used under normal operating conditions)
- If there are any issues due to a manufacturing defect within the warranty period, we will repair or replace the product.
- Warranty will be void if the product is used or handled improperly by user.
- Warranty will be void if the product is repaired or modified in any way.
- Warranty will be void if the product is damaged by any external components (ie. motor)
- Warranty will be void in the case the product is affected by natural disasters and/or uncontrollable circumstances.
- ROBOTIS is not responsible for any damages or injuries that may occur by the failure of the product mid operation.
Features
- Superior Impact Resistance
- High Durability & Strong Rigidity
- High Efficiency & Low Backlash
- High Precision
- Various Gear Ratios
- Lightweight & Compact Gear Module
Gear Ratio and Rotational Direction
In the following table, its shown input rotate direction and output rotate direction depend on fixed part.
The housing fixed type is input and output rotations in the opposite direction.
| Fixed | Output Speed | Input Direction | Output Direction | Example |
|---|---|---|---|---|
| Housing | i=(-1)1/R | Cathode (+) | Anode (-) | 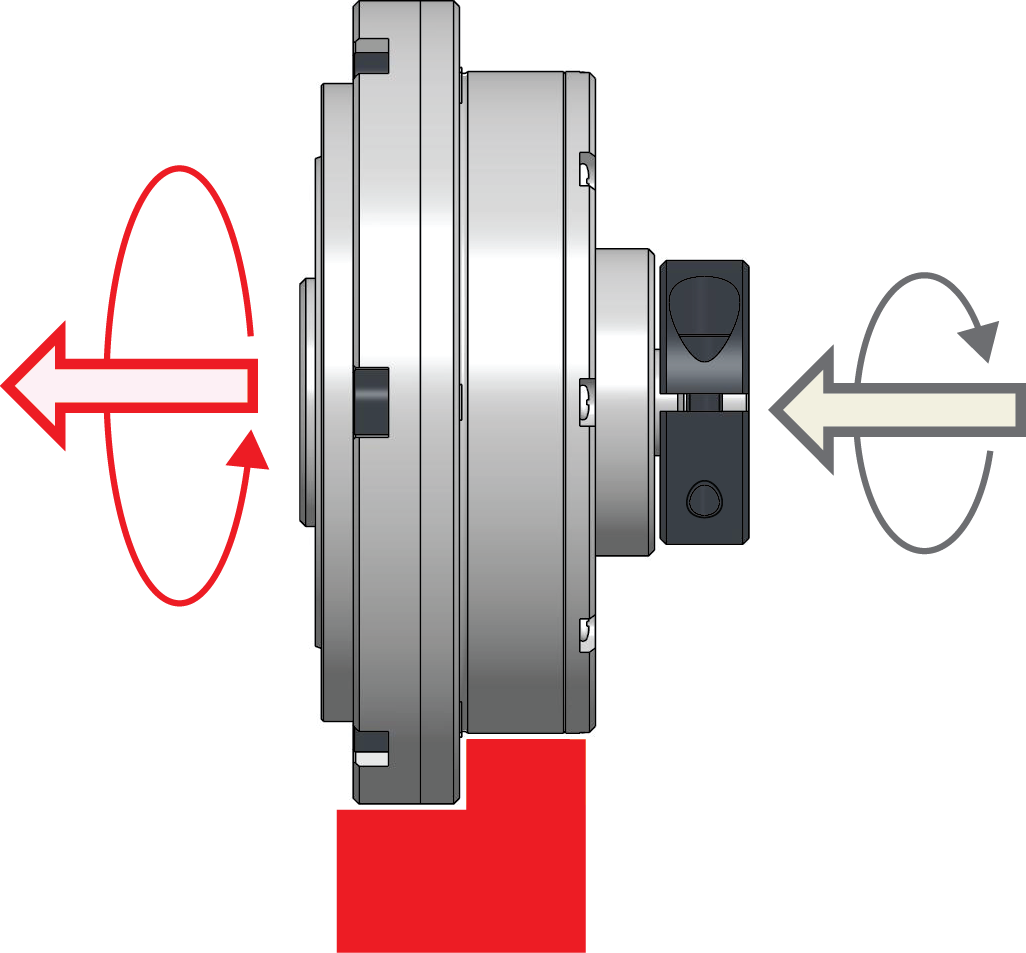 |
| Output flange | i=1/(R+1) | Cathode (+) | Cathode (+) | 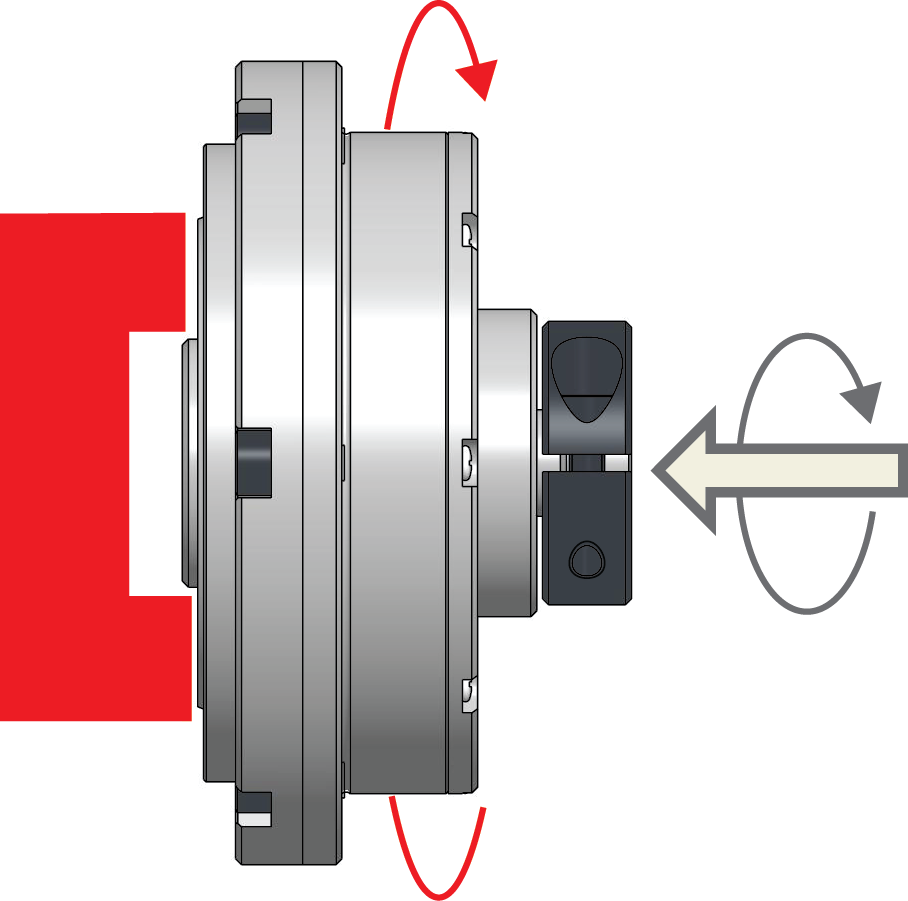 |
Product Lineup
| DYD-11 | DYD-14 | DYD-17 |
|---|---|---|
 |
 |
 |
 |
 |
 |
Specifications
| Properties | Unit | DYD-11-033 | DYD-11-051 | DYD-14-051 | DYD-14-099 | DYD-17-051 | DYD-17-099 |
|---|---|---|---|---|---|---|---|
| Gear ratio | - | 33 | 51 | 51 | 99 | 51 | 99 |
| Rated output torque (@2,000rpm) | Nm | 2.2 | 3.5 | 3.7 | 5.4 | 11 | 16 |
| Permissible peak torque at accel / decel | Nm | 8.8 | 14 | 14.8 | 21.6 | 44 | 64 |
| Permissible peak torque at E-stop | Nm | 28 | 28 | 43.2 | 43.2 | 96 | 96 |
| Nominal input speed | rpm | 2,000 | 2,000 | 2,000 | 2,000 | 2,000 | 2000 |
| Maximum input speed | rpm | 8,500 | 8,500 | 8,500 | 8,500 | 8,500 | 8500 |
| Backlash | arcmin | <3.0 | <3.0 | <3.0 | <3.0 | <3.0 | <3.0 |
| Efficiency (@ 2,000rpm, 20℃) | % | 65 | 65 | 60 | 60 | 70 | 70 |
| Starting torque | cNm | 5 | 3 | 5 | 3 | 4 | 3 |
| Back-drive torque | Nm | 1 | 1 | 3 | 3 | 5 | 5 |
| Dimensions | mm | □43 × 23.5 | □43 × 23.5 | ∅68 × 30 | ∅68 × 30 | ∅78 × 34.2 | ∅78 × 34.2 |
| Weight | g | 196 | 196 | 400 | 400 | 600 | 600 |
- Nominal input speed: 2,000 rpm
- Maximum input speed: 8,500 rpm
- Service life: 7,000 hours
Naming Convention

| Product Name | Model Size | Gear Ratio | Input Shaft | Special Production |
|---|---|---|---|---|
| DYD | 11 | 33, 51 | C SD |
SP |
| DYD | 14 | 51, 99 | C SD |
SP |
| DYD | 17 | 51, 99 | C SD |
SP |
Engineering Data
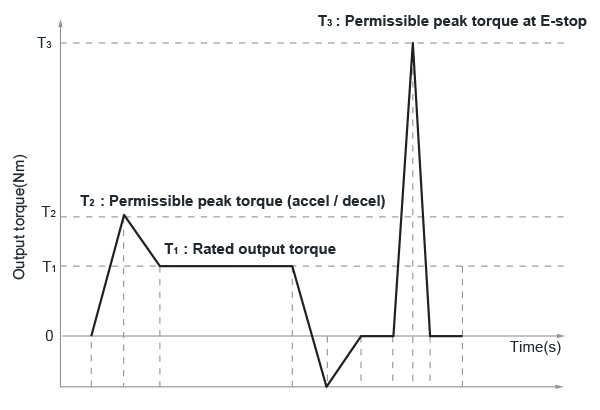
Rated output torque
Rated output torque indicates allowable continuous load torque at rated input speed.
Permissible peak torque at accel / decel
When the reducer is operating, a torque higher than the rated torque is applied during acceleration or deceleration. It is used when calculating the average output torque. See “duty cycle”.
Permissible peak torque at E-stop
The gear may be subjected to momentary peak torques in the event of a collision or emergency stop.
Nominal input speed
Nominal input speed represents a limit for average working cycle speed.
Maximum input speed
The maximum input speed is the speed limit in the continuous operation.
Moment of inertia
The moment of inertia represents the moment of mass inertia based on the input axis of rotation.
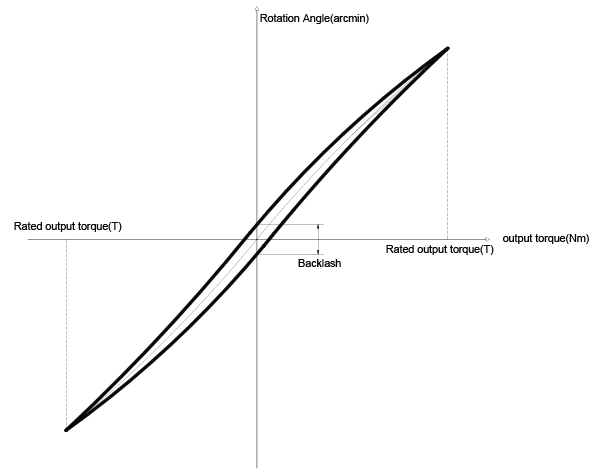
Backlash
As shown in the figure below, when the applied torque is increased to the rated torque and is brought back to zero, the torsional angle does not return exactly back to the zero point. This small difference is called hysteresis loss.
Efficiency
The efficiency of the reduction gears depends on the specific lost motion, input speed, load, lubricant temperature and size. The results statistically evaluated from current production tests.
Starting torque
The starting torque is a quasi-static torque required to start rotation of the input shaft(dynamic friction), if no load is applied to the output flange.
Back-drive torque
The back-driving torque is the torque applied on the output flange that is required to start rotation of the input shaft under no load. And the output flange fully rotate 1 revolution.
Product Selection Guide
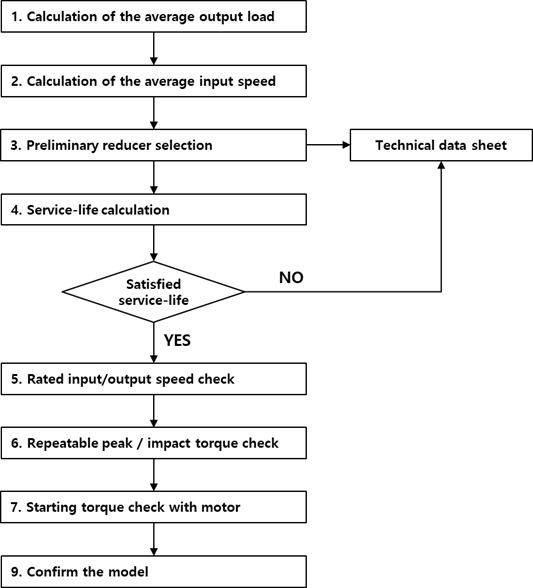
Selection Flow Chart
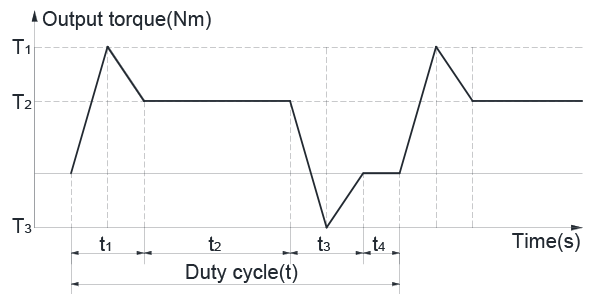
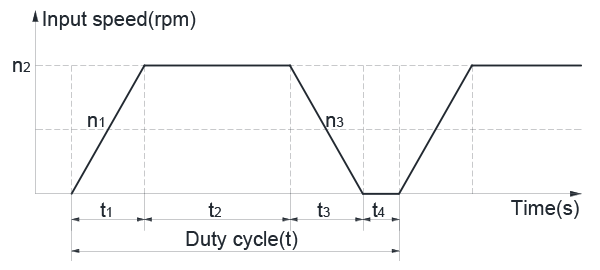
Duty Cycle
In the figure the duty cycle is different from your cases, please supply the drawing and values of your duty cycle. These values are important for us to be able to determine effectively lifetimes
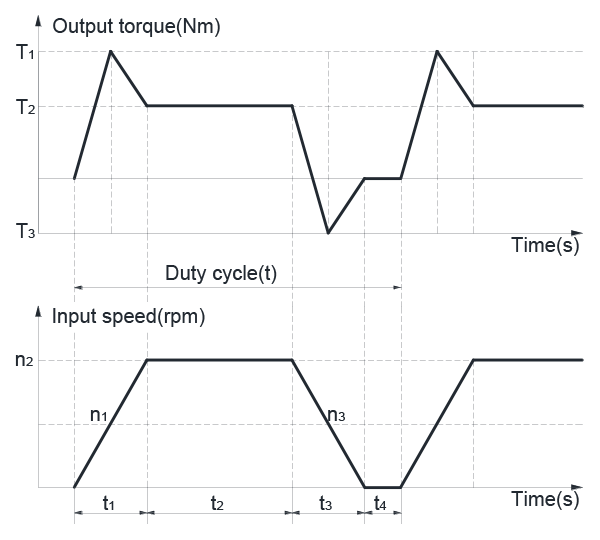
| Properties | Description | Properties | Description |
|---|---|---|---|
| Ta | Average output load [Nm] | na | Average input speed [rpm] |
| T1 | Maximum output torque at acceleration [Nm] | n1 | Average input speed at acceleration [rpm] |
| T2 | Output torque at constant speed [Nm] | n2 | Input speed at constant motion [rpm] |
| T3 | Maximum output torque at deceleration [Nm] | n3 | Average input speed at deceleration [rpm] |
| t1 | Acceleration time [s] | ||
| t2 | Constant motion time [s] | ||
| t3 | Deceleration time [s] | ||
| t4 | Idle time [s] | ||
| t | Duty cycle time [s] |
Average Output Load
Please calculate values of your average output load.

Average Input Speed
Please calculate values of your average input speed.

Service Life
The nominal service life of the Dynamixel Drive is determined by the service life of the bearings on the input shaft.
This nominal service life is limited by the material fatigue of the bearings. It does not take into account other factors that may be a limit to the practical service life, such as insufficient lubrication, contamination or overload. The nominal service life is only a statistical value.
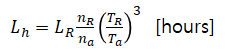
The required service life for a given speed and load values can be calculated as follows:
| Properties | Description |
|---|---|
| Lh design | Design service life [hour] |
| Lh calculated | Calculated service life [hour] |
| LR | Reference service life [hour] |
| nR | Nominal input speed [rpm] |
| na | Average input speed [rpm] |
| TR | Rated torque [Nm] |
| Ta | Average output load [Nm] |
Service Life with Output Load
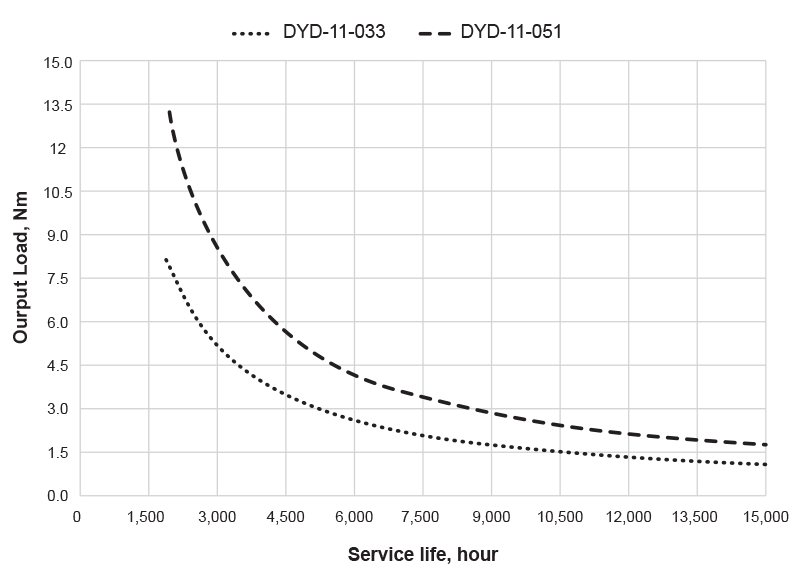
Service Life: DYD-11 | Test condition : Input speed 2,000rpm, Test environment : Temperature 22 ºC, Humidity 55%
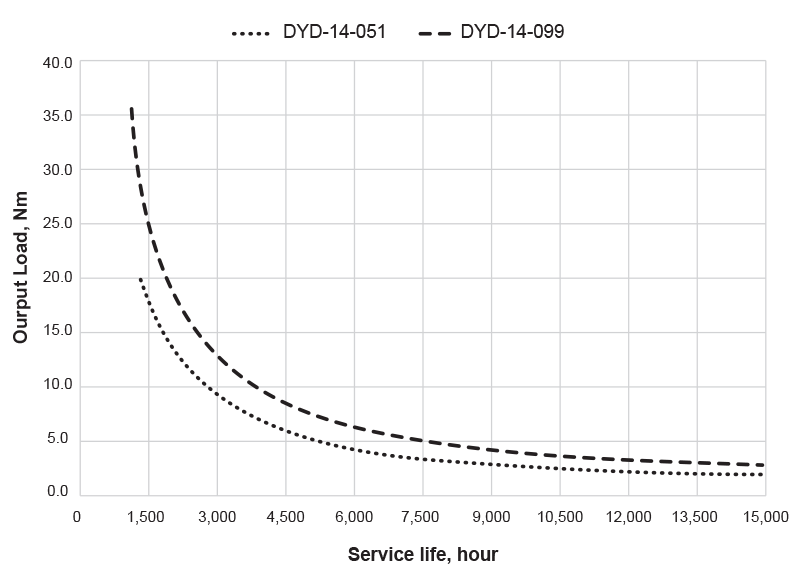
Service Life: DYD-14 | Test condition : Input speed 2,000rpm, Test environment : Temperature 22 ºC, Humidity 55%
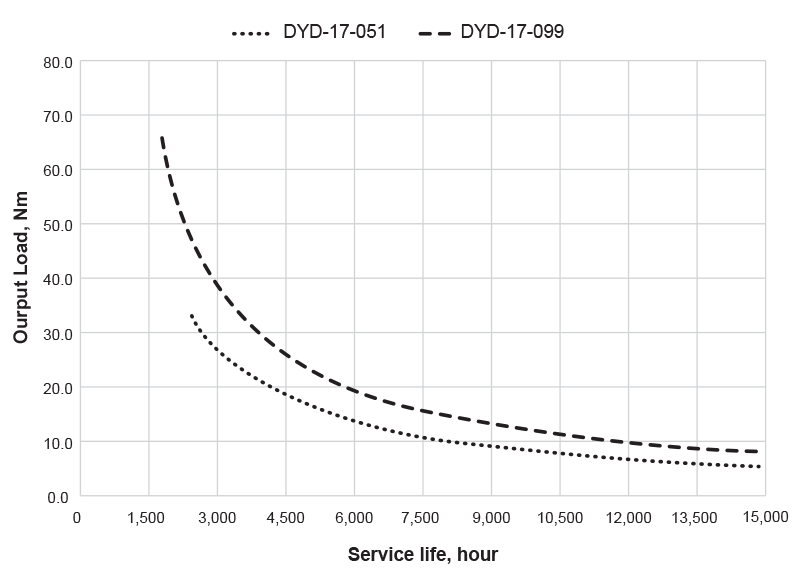
Service Life: DYD-17 | Test condition : Input speed 2,000rpm, Test environment : Temperature 22 ºC, Humidity 55%
Product Selection Example
Define the Duty Cycle
| Properties | Description | Value | Note |
|---|---|---|---|
| T1 | Maximum output torque at acceleration | 7.5 Nm | |
| T2 | Output torque at constant speed | 5 Nm | |
| T3 | Maximum output torque at deceleration | 2.5 Nm | |
| n1 | Average input speed at acceleration | 1,500 rpm | |
| n2 | Input speed at constant motion | 3,000 rpm | |
| n3 | Average input speed at acceleration | 1,500 rpm | |
| t1 | Acceleration time | 1 s | |
| t2 | Constant motion time | 5 s | |
| t3 | Deceleration time | 1 s | |
| t4 | Idle time | 0 s | |
| Lh design | Design service life | 6,500 hour |
Average Output Load Calculation
| Properties | Description | Value | Note |
|---|---|---|---|
| Ta | Average output load | 4.72 Nm | cal. |
Average Input Speed Calculation
| Properties | Description | Value | Note |
|---|---|---|---|
| na | Average input speed | 2,571.43 rpm | cal. |
Pre-Selection : DYD-14-051
| Properties | Unit | DYD-14-051 |
|---|---|---|
| Gear ratio | - | 51 |
| Rated output torque (@2,000rpm) | Nm | 3.7 |
| Permissible peak torque (accel / decel) | Nm | 14.8 |
| Permissible peak torque at E-stop | Nm | 43.2 |
| Nominal input speed | rpm | 2,000 |
| Maximum input speed | rpm | 8,500 |
| Backlash | arcmin | <3.0 |
| Efficiency | % | 60 |
| Dimension | mm | Ø68 × 30 |
| Weight | g | 400 |
Expected Service Life Calculation: DYD-14-051
| Properties | Description | Value | Note |
|---|---|---|---|
| Lh calculated | Calculated service life | 6,027 hour | cal. |
| Lh design | Design service life | 6,500 hour | |
| nR | Nominal input speed | 2,000 rpm | see data sheet |
| na | Average input speed | 2,142 rpm | |
| TR | Rated torque | 3.7 Nm | see data sheet |
| Ta | Average output torque | 4.72 Nm |
Design service life comparison : DYD-14-051
Design service life : 6,500 hour > Calculated service life : 6,027 hour
Pre-Selection : DYD-14-099
| Properties | Unit | DYD-14-099 |
|---|---|---|
| Gear ratio | - | 99 |
| Rated output torque (@2,000rpm) | Nm | 5.4 |
| Permissible peak torque (accel / decel) | Nm | 21.6 |
| Permissible peak torque at E-stop | Nm | 43.2 |
| Nominal input speed | rpm | 2,000 |
| Maximum input speed | rpm | 8,500 |
| Backlash | arcmin | <3.0 |
| Efficiency | % | 60 |
| Dimension | mm | ∅68 × 30 |
| Weight | g | 400 |
Expected Service Life Calculation: DYD-14-099
| Properties | Description | Value | Note |
|---|---|---|---|
| Lh calculated | Calculated service life | 6,837 hour | cal. |
| Lh design | Design service life | 6,500 hour | |
| nR | Nominal input speed | 2,000 rpm | see data sheet |
| na | Average input speed | 2,142 rpm | |
| TR | Rated torque | 5.4 Nm | see data sheet |
| Ta | Average output torque | 4.72 Nm |
Design service life comparison : DYD-14-099
Design service life : 6,500 hour < Calculated service life : 6,837 hour
Select the input shaft type
Two types of input shafts are available; C and SD.
| Option | Type - C | Type - SD |
|---|---|---|
| Shape |  |
 |
| Name | Clamp-ring | Set-screw (D-Cut) |
Use Applications