
Introduction
R+m.Task 2.0 provides identical functions on Android / iOS devices as R+Task 2.0 does on PC.
Downloading, editing, debugging tasks, and remote controller is supported.
System Requirements
Please keep the lastest firmware for the controller.
The device must support bluetooth in order to use download feature.
Android
- OS : Android 2.3
- Hardware : 1.2 dual-core CPU, 1GB RAM, Bluetooth/IMU sensor
- BT-410 Support (Android 4.4 or above)
- BT-210, BT-110 Support
Apple
- OS : iOS 8.0
- Hardware : iPhone4S, iPod 5G, iPad mini, iPad 2
- BT-410 Support
- BT-210, BT-110 NOT supported
Supported Products
Supported Controllers
App Download
App Installation
- Launch
Google Playfrom the smart device. - Search for
ROBOTISin the search form. - From the list, select
R+ m.Task2andInstall. -
Acceptthe request for accessing device.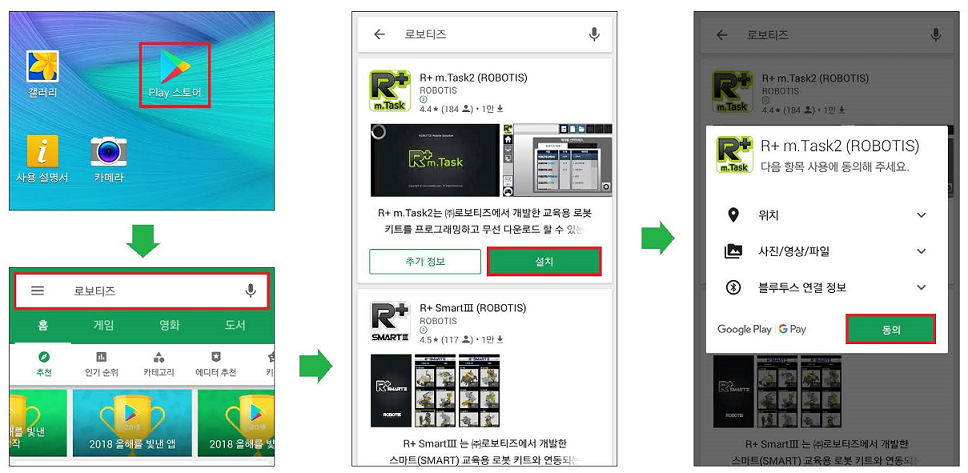
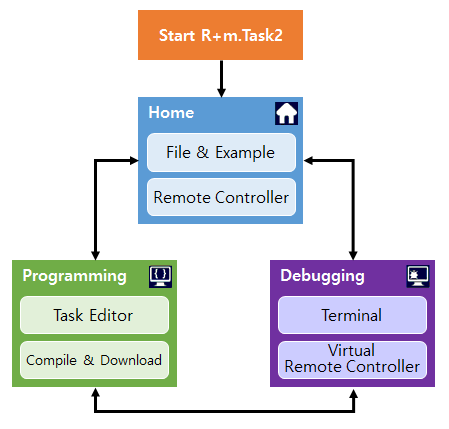
Menu Descriptions
Function Tabs
Workspaces are divided into Home, Programming, and Debugging.
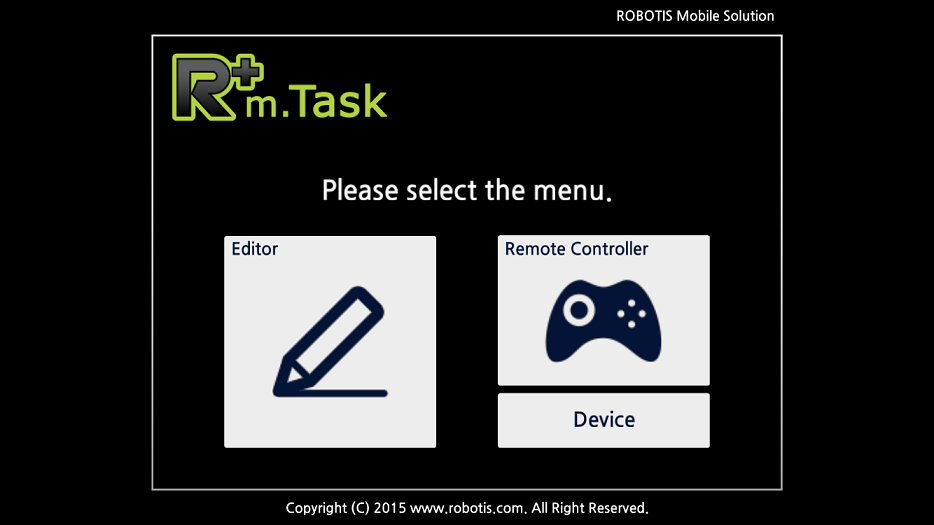
Start Screen
At the start screen, user can select Editor or Remote Controller and set the Bluetooth Device.
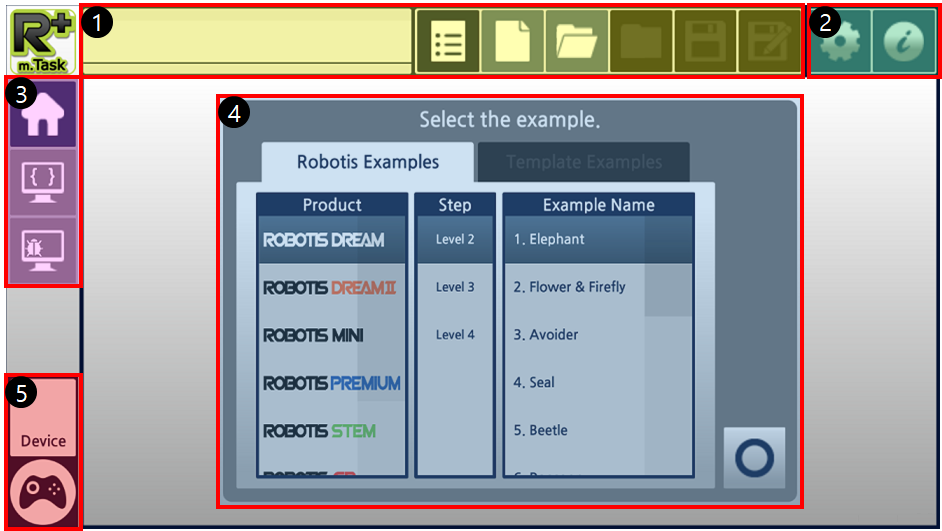
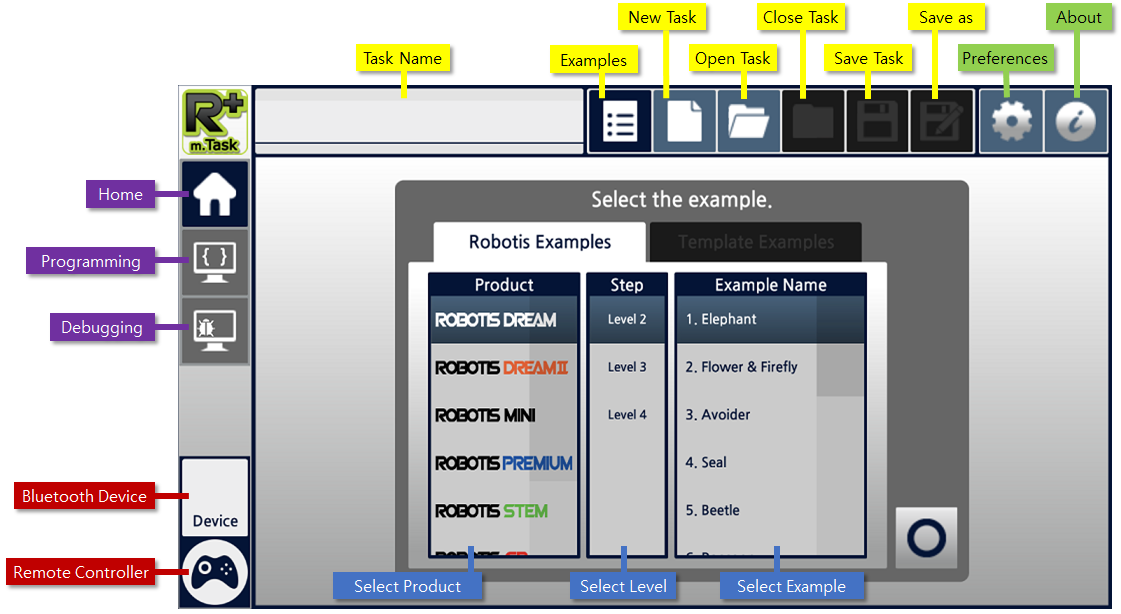
Home Tab
Below is the initial screen when user selects Editor in the start screen.
- File Menu
- Preferences and Software Information
- Menu Tab
- Example Select Menu
- Remote Controller
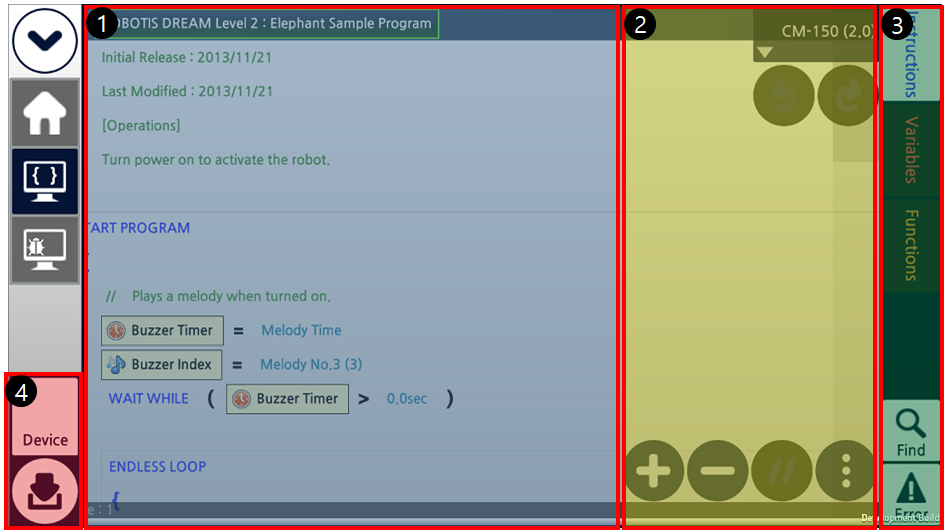
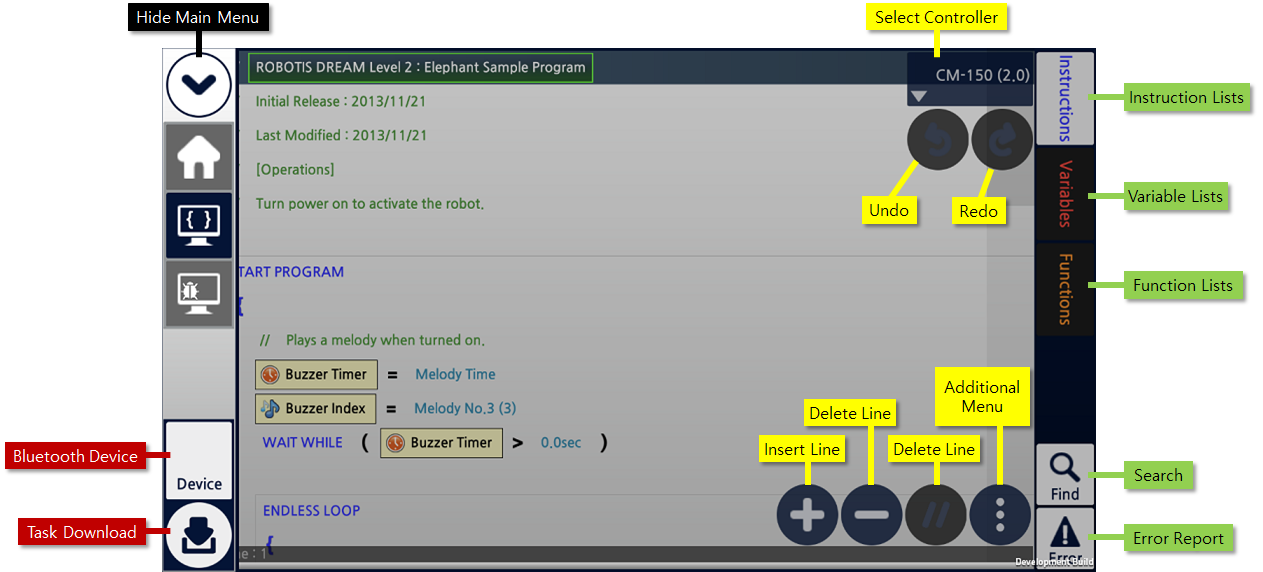
Programming Tab
In the Programming Tab, user can edit the task source code.
- Source Code Area
- Programming Tools
- Menu
- Device and Download
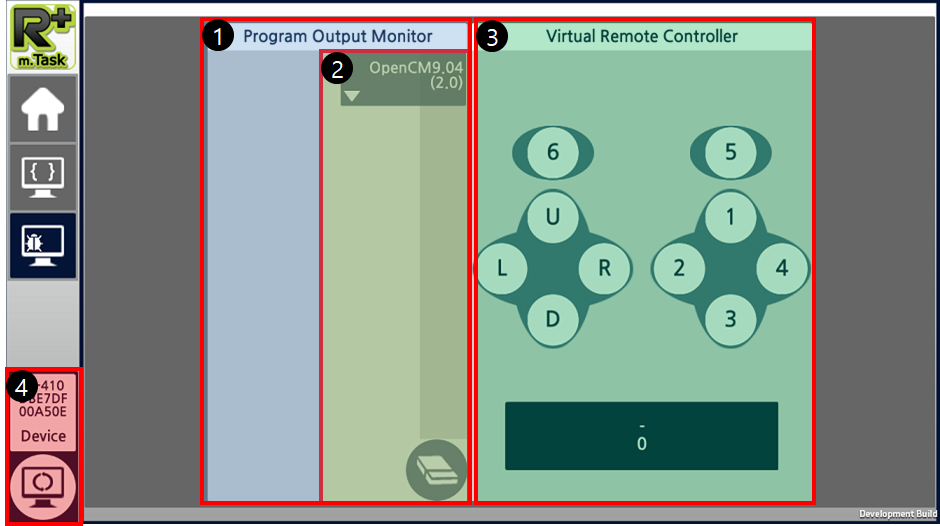
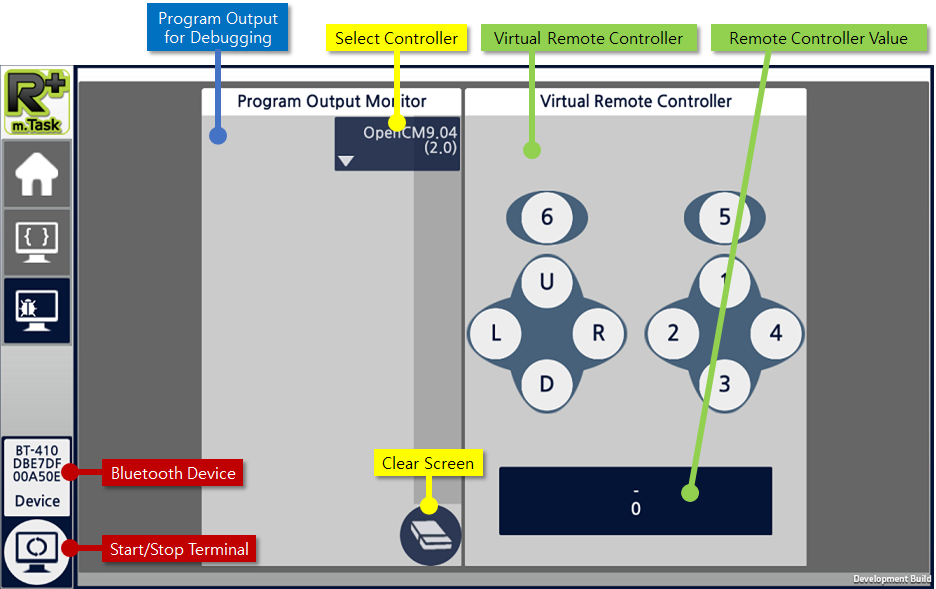
Debugging Tab
Debugging Tab helps to debug the written code.
(Auto connect feature has been applied for easier use)
- Program Output Window
- Debugging Tools
- Virtual Remote Controller
- Device and Terminal Control
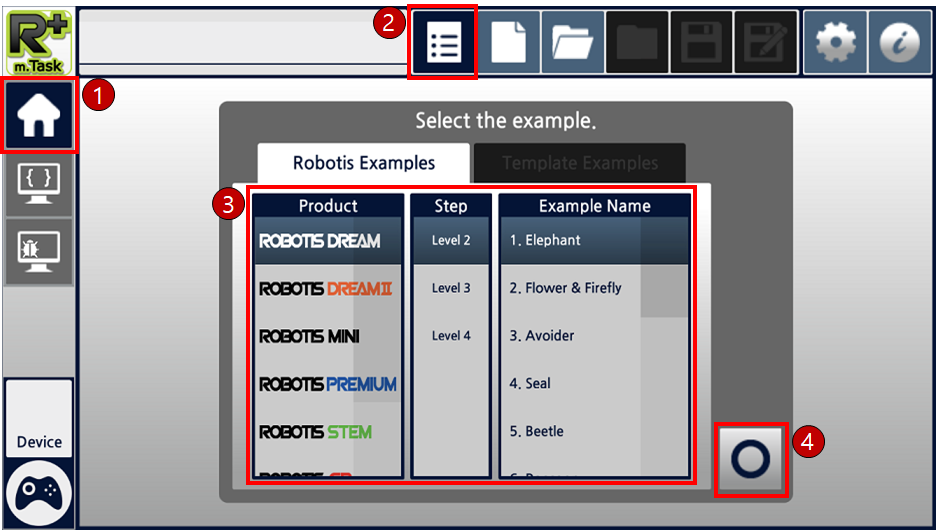
Practice
Open Example
- Move to
Hometab. (Home tab is the default location when program starts) - Select the
Examplesbutton. - Select the Product, Level, and Example Name.
- Confirm the selection.
Create New File
- Move to
Hometab. (Home tab is the default location when program starts) -
Select the
New Taskbutton.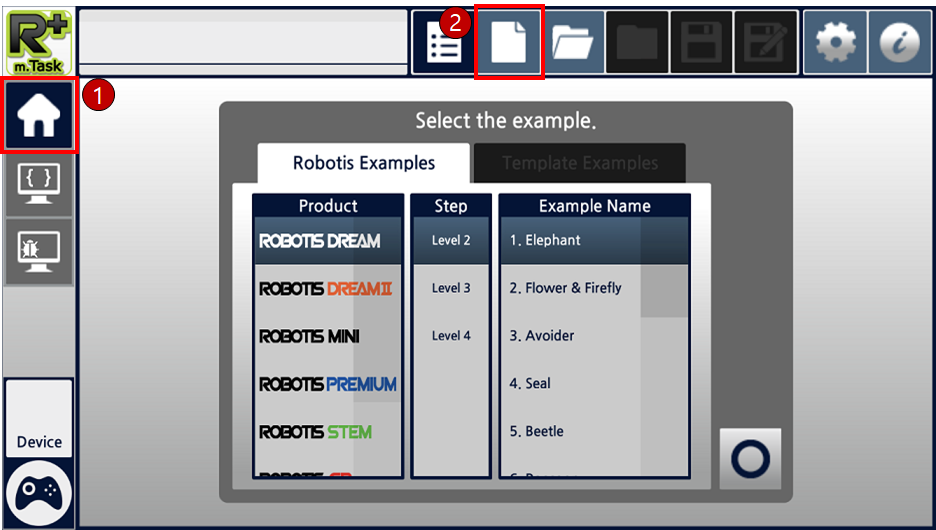
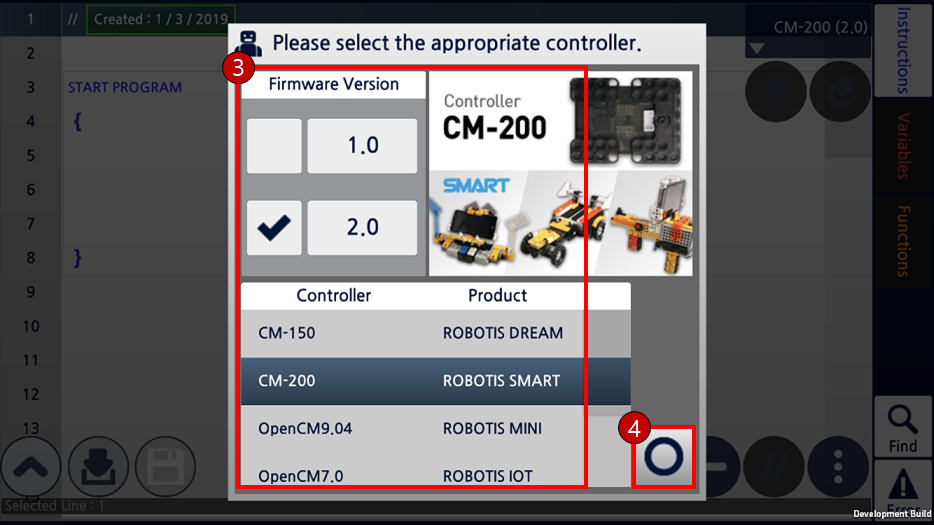
- Select Firmware Version(Protocol Version) and the Controller.
-
Confirm the selection to create the new task.
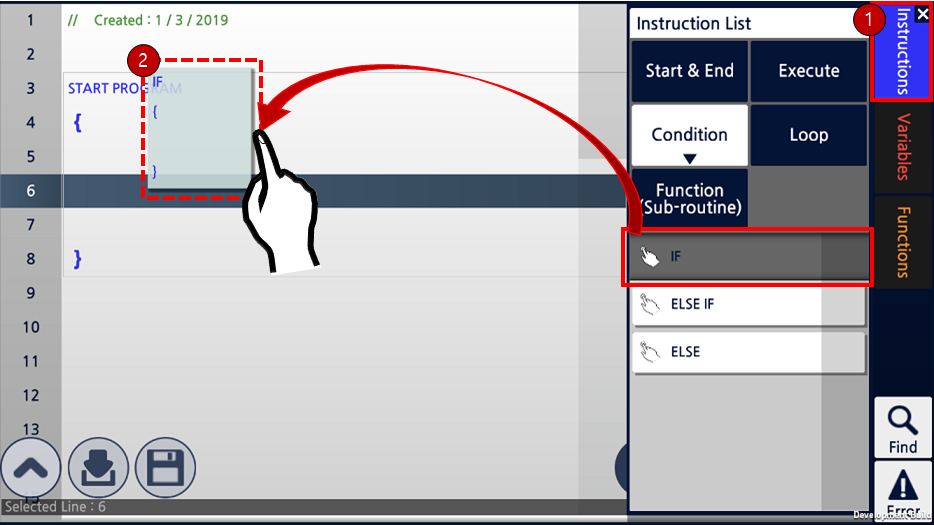
Instructions
- Move to
Programmingtab. (When creating a new task, Programming tab will be selected by default) - Select
Instructionsbutton. -
Select
Loopcategory.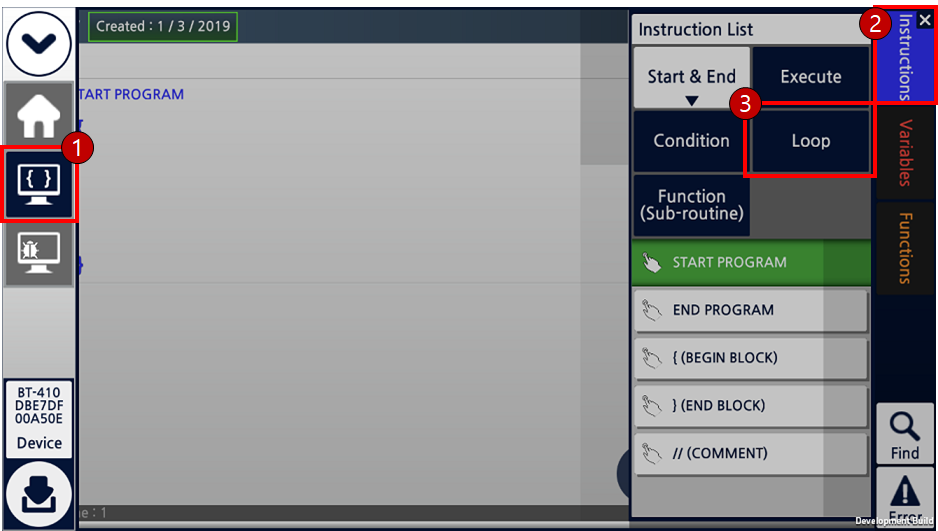
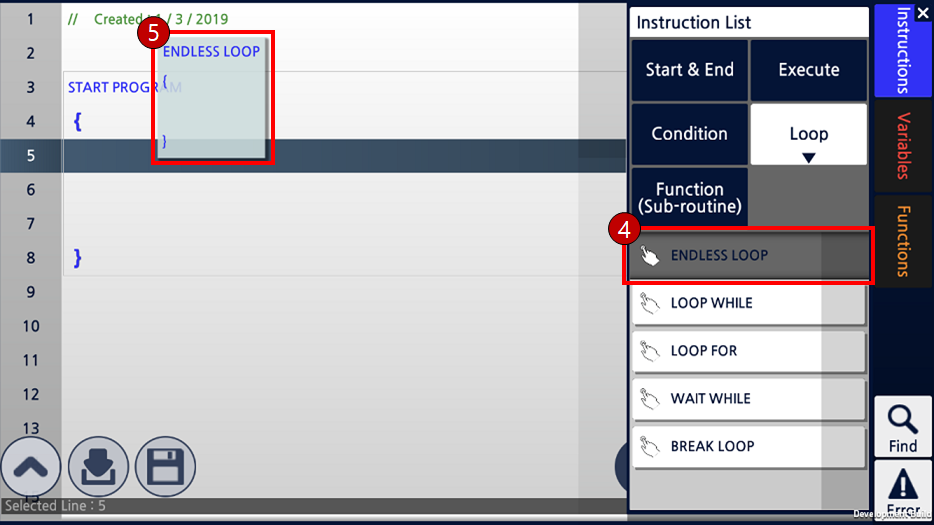
- Select
ENDLESS LOOPand drag the instruction. -
Drop the selected instruction where it should be inserted.
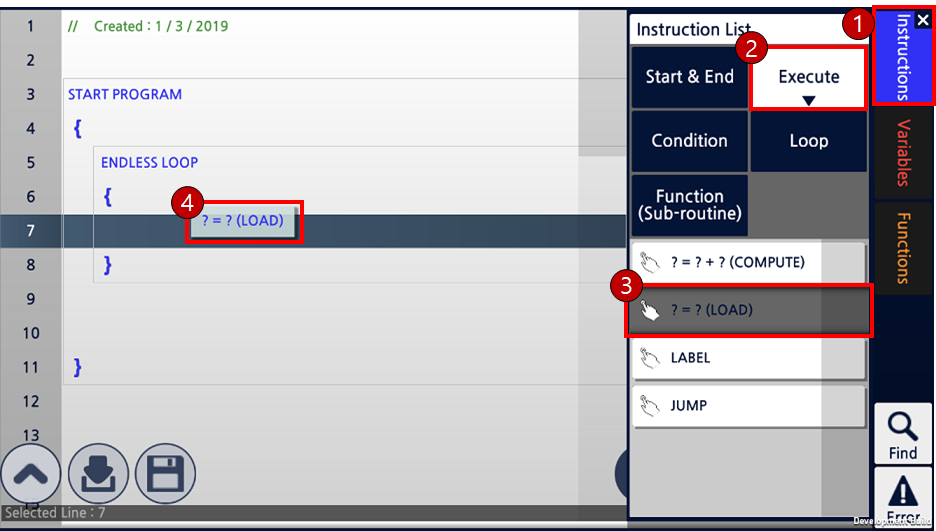
Edit Parameters
- Select
Instructionsbutton. - Select
Executecategory. - Select
LOADinstruction. -
Drag and drop the instruction where it should be inserted.
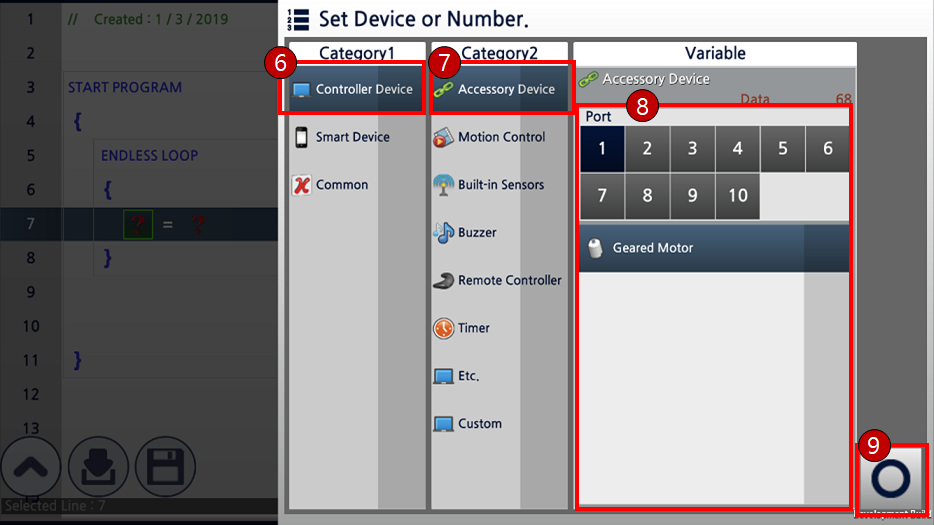
-
Double tap on the left side block of the inserted instruction.

- Select
Controller Devicein the Category 1. - Select
Accessory Devicein the Category 2. - Select
Port 1and selectGeared Motor. -
Confirm the selection to finish editing.
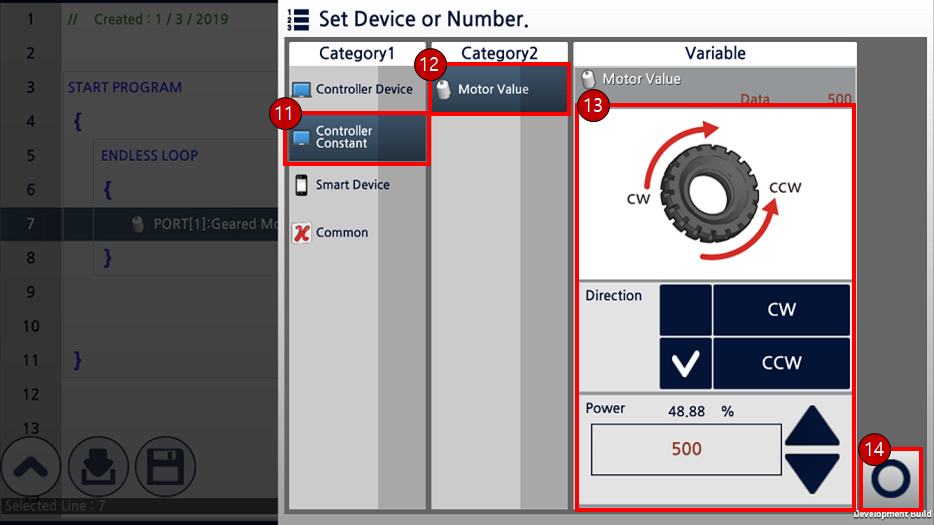
-
Double tap on the right side block of the instruction.

- Select
Controller Constantin the Category 1. - Select
Motor Valuein the Category 2. - Select
CCWfor rotational direction and enter500for the Power. -
Confirm the selection to finish editing.
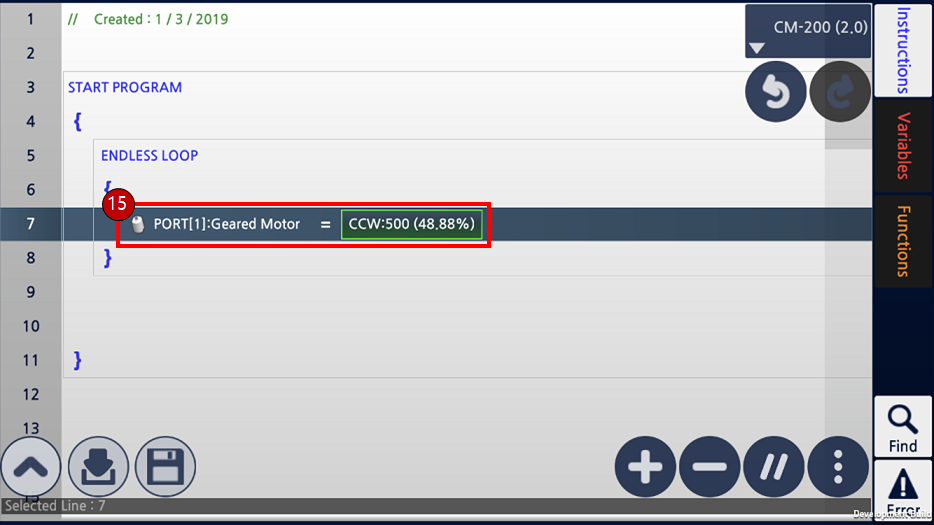
-
Make sure that the instruction is properly edited.
Task Download
- Select
Devicebutton. - Select the Bluetooth device of the robot (If Bluetooth device has not been connected before, search the device by using
Filterbutton on the right) - Confirm the selection and close the Device window.
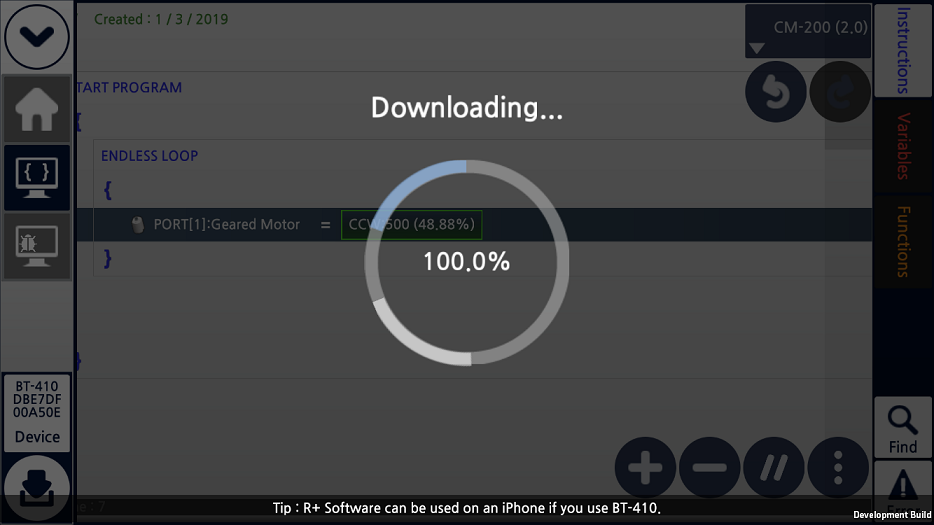
-
Select
Downloadbutton to start downloading.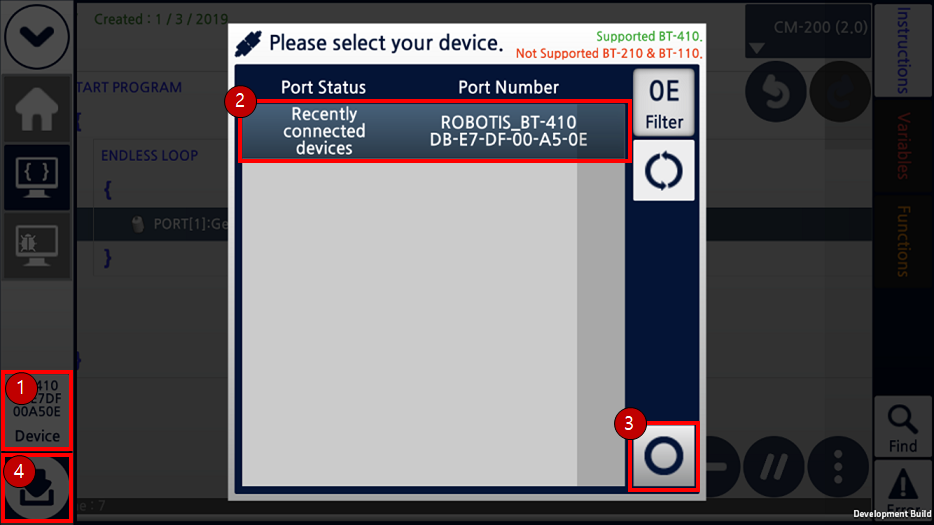
-
When download is completed the controller executes Task (Some controllers are shut off after the download).
Program Output Monitor
- Move to
Debuggingtab. - Select
Devicebutton. - Select the Bluetooth device of the robot (If Bluetooth device has not been connected before, search the device by using
Filterbutton on the right) - Confirm the selection and close the Device window.
-
Select
Start Terminalbutton.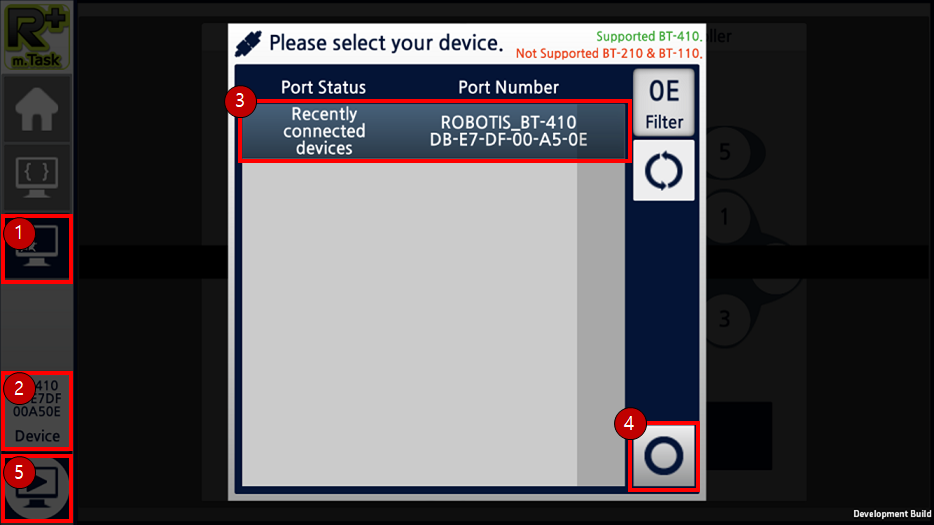
-
When robot is connected,
Program Output MonitorandVirtual Remote Controllerare enabled.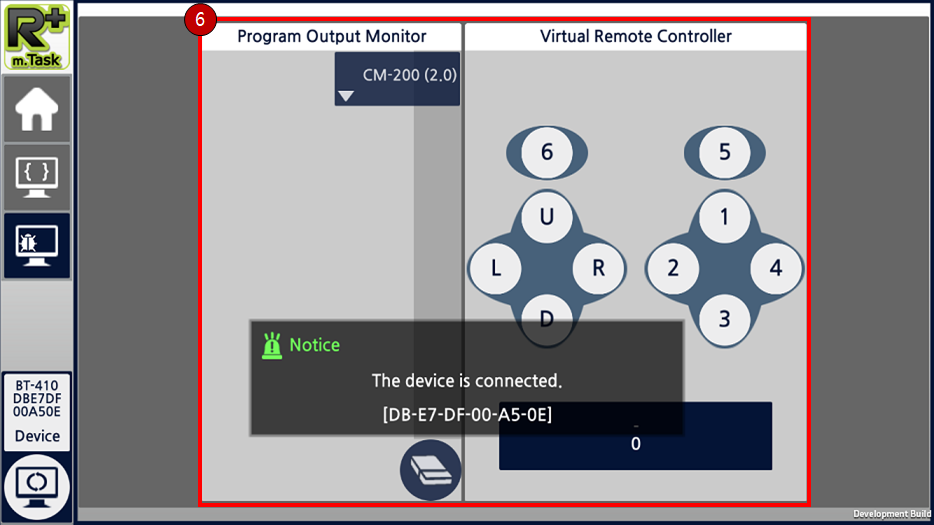
-
If
Print Screen with Lineinstruction is used in the source code as shown below,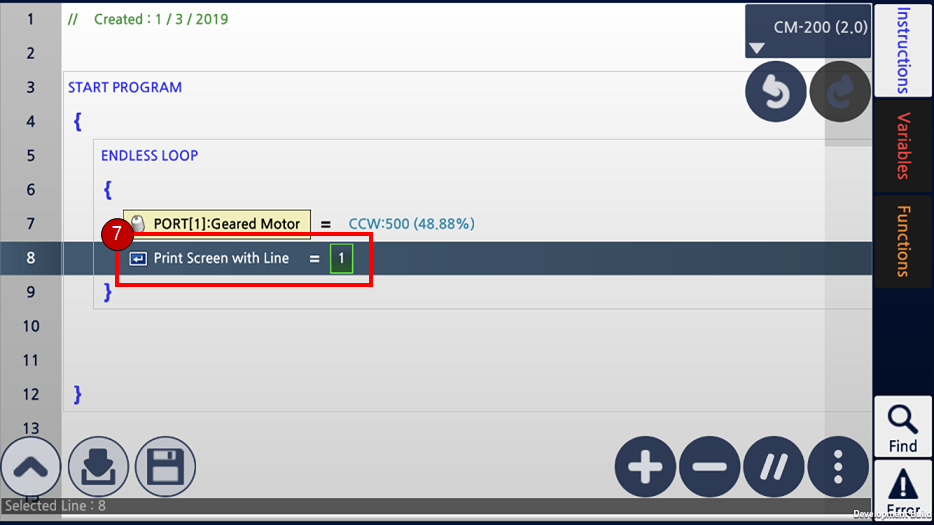
-
New line feed will be applied in the
Program Output Monitor.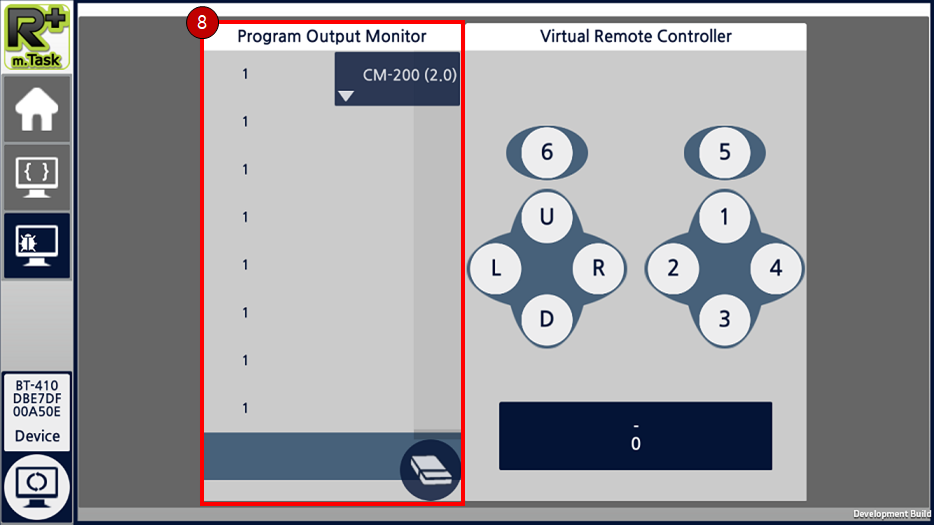
Remote Controller
- Move to
Hometab. (Home tab is the default location when program starts) - Select
Devicebutton. - Select the Bluetooth device of the robot (If Bluetooth device has not been connected before, search the device by using
Filterbutton on the right) - Confirm the selection and close the Device window.
-
Tap the
Remote Controllerbutton.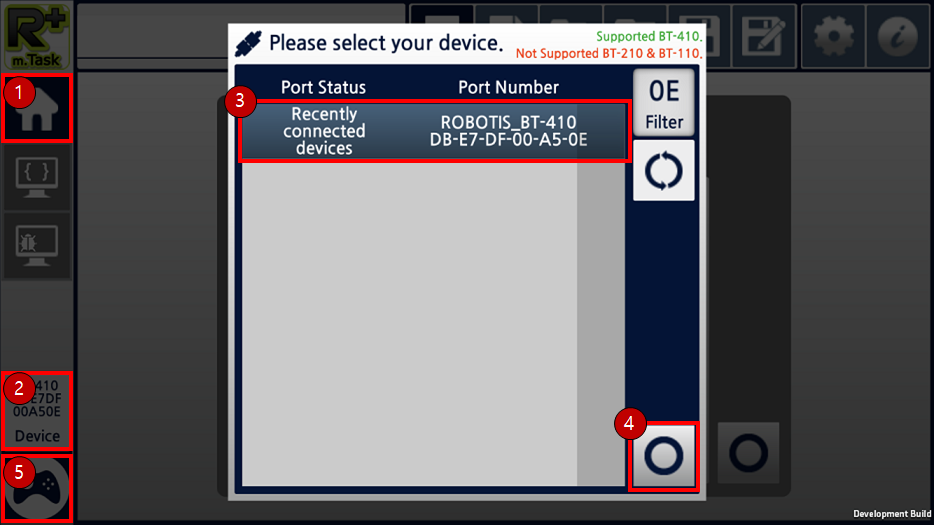
-
Buttonsmode is the default setting for the Remote Controller.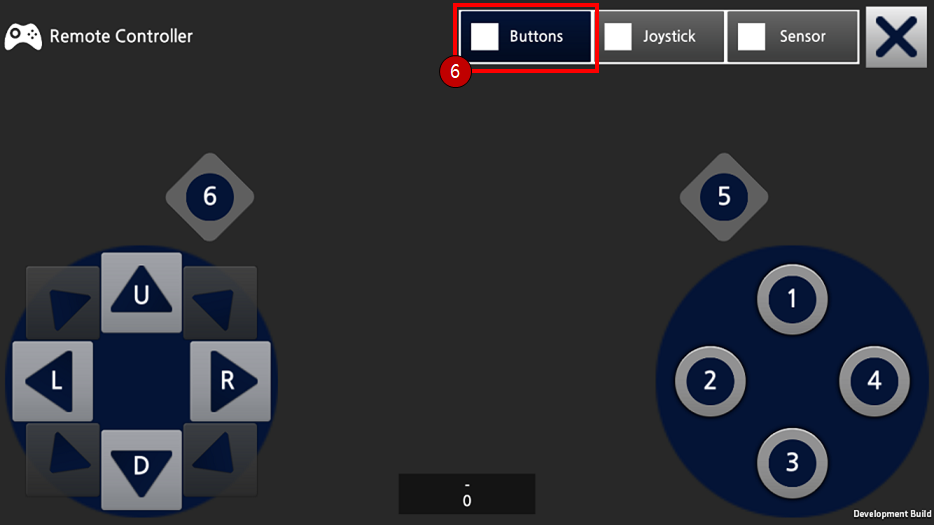
-
Select
Joystickto use virtual joystick instead of directional buttons.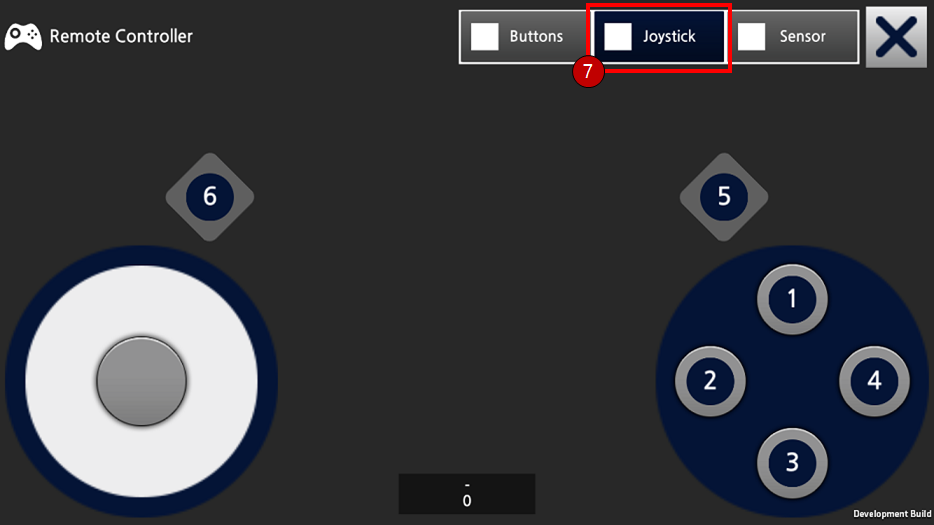
-
Select
Sensorto use tilt sensor as a directional control.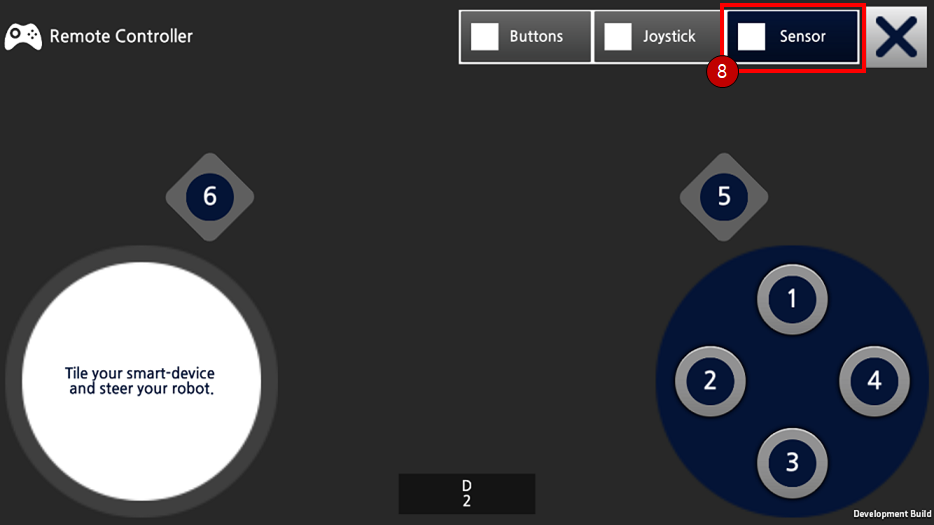
Programming(Edit)
Insert/Edit Instruction
-
Select
Instructionsbutton (or double tap the location where the instruction will be inserted). -
Drag and drop the instruction.
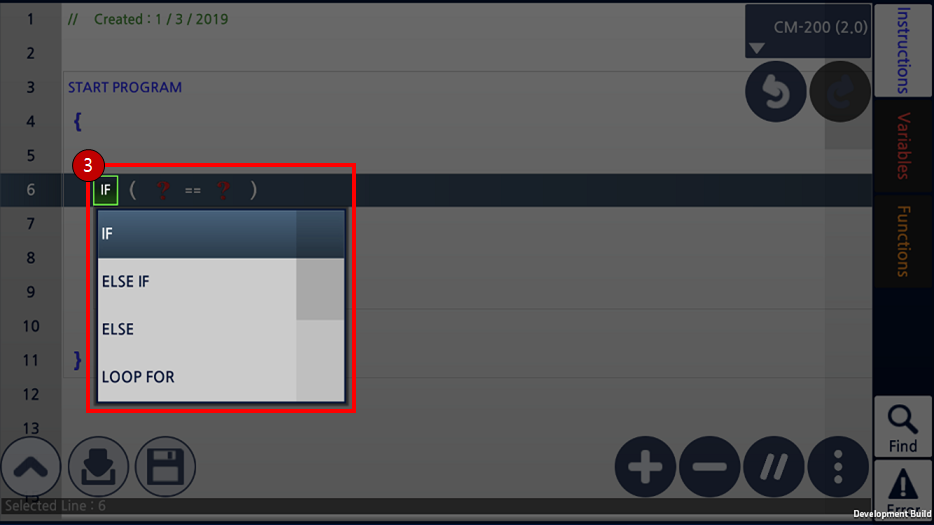
-
The inserted instruction can be changed to other instructions by double tapping the instruction block.
Select Multiple Lines
-
Drag the line number to select multiple lines.
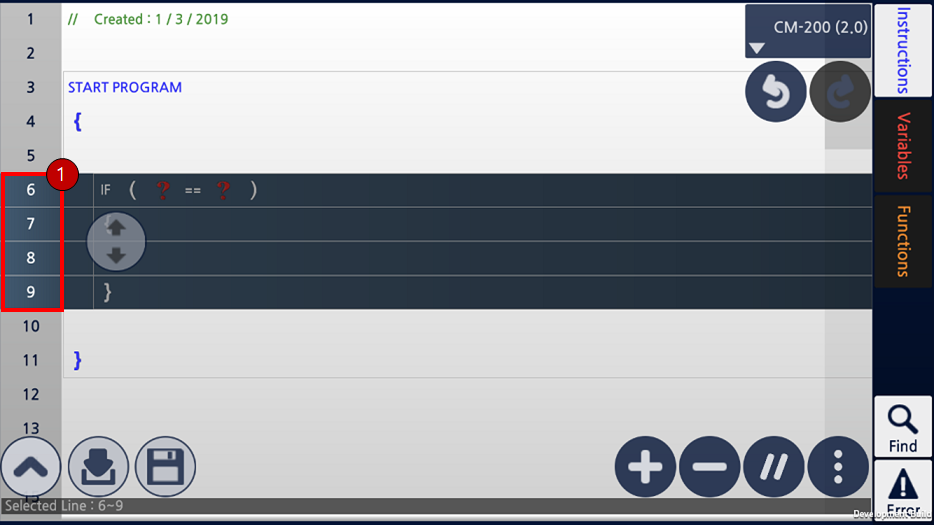
-
Dragging on the selected lines will deselect them.

-
Tapping on the source code will cancel the line selection.
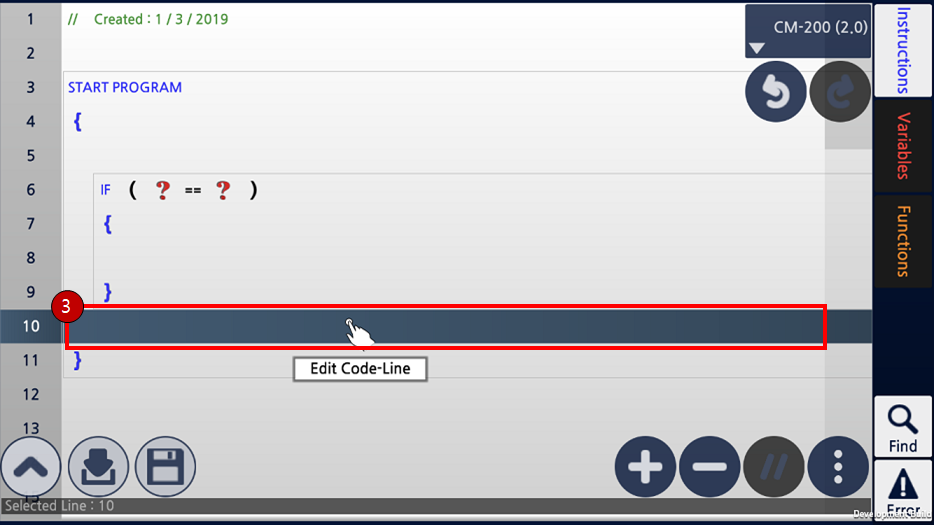
Insert/Delete Line
- Select the line to insert a new line or delete the line.
- Select
Insert(+)button to insert a new line before the selected line. - Select
Delete(-)button to delete the selected line.
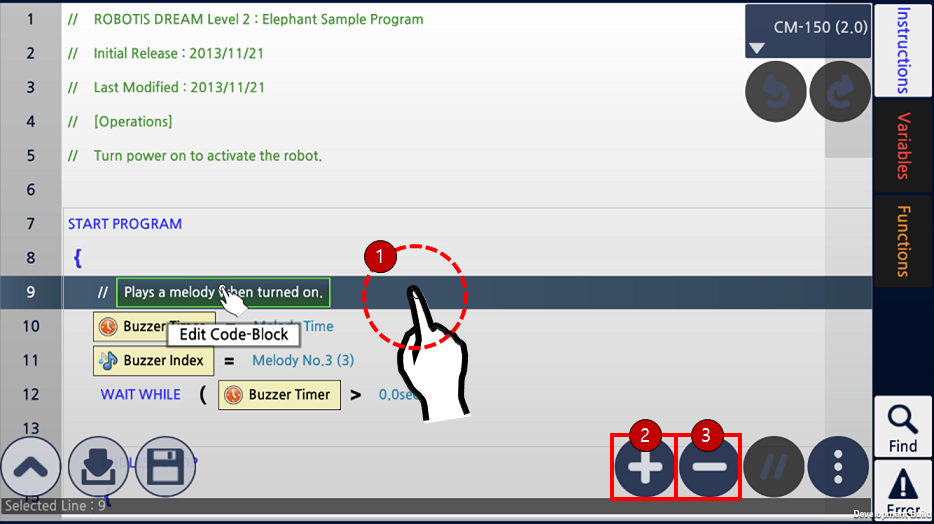
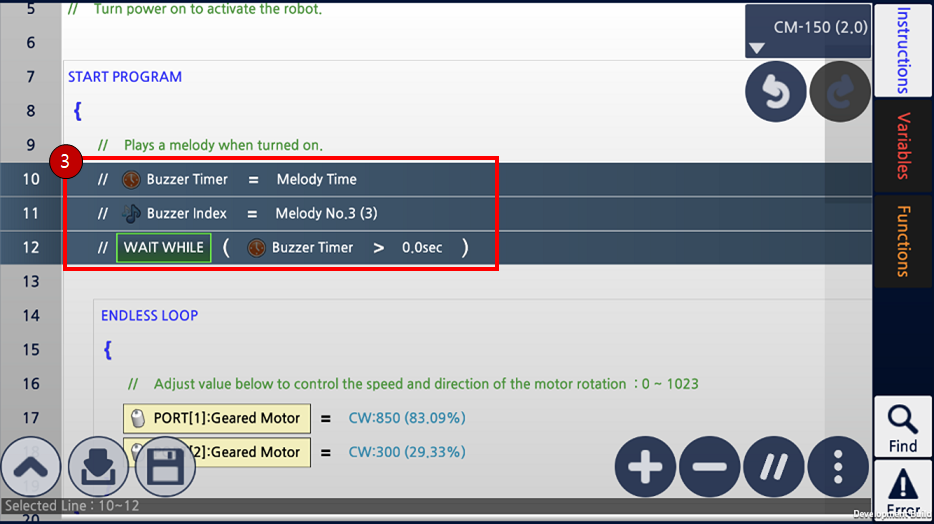
Enable/Disable Line
- Select the line to enable or disable.
-
By tapping the
Enable/Disablebutton, selected lines will be commented or uncommented.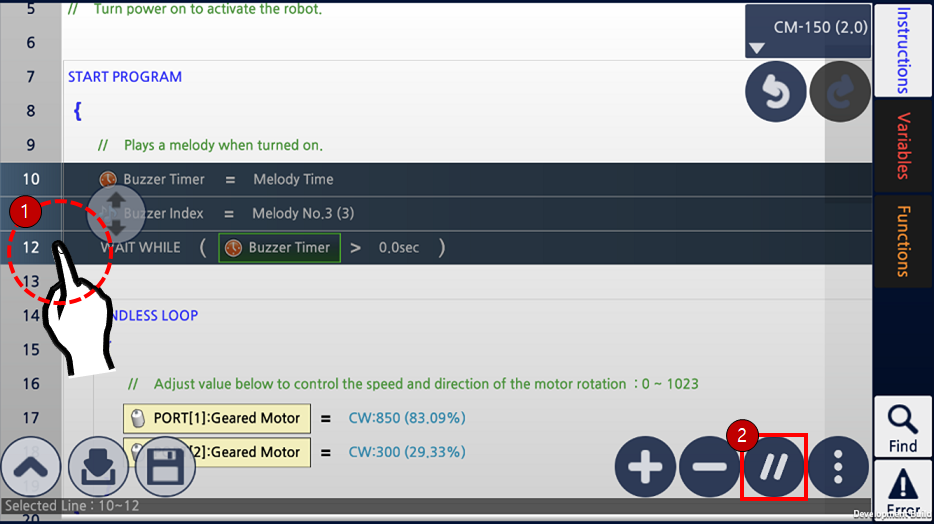
-
Disabled(Commented) lines will be displayed in gray font.
Copy/Cut/Paste
- Select lines to copy or cut.
-
Tap on the
Additional Menu.
-
Select
CopyorCutto save selected lines in the clipboard.
- Select the line where saved lines to be pasted.
-
Tap on the
Additional Menu.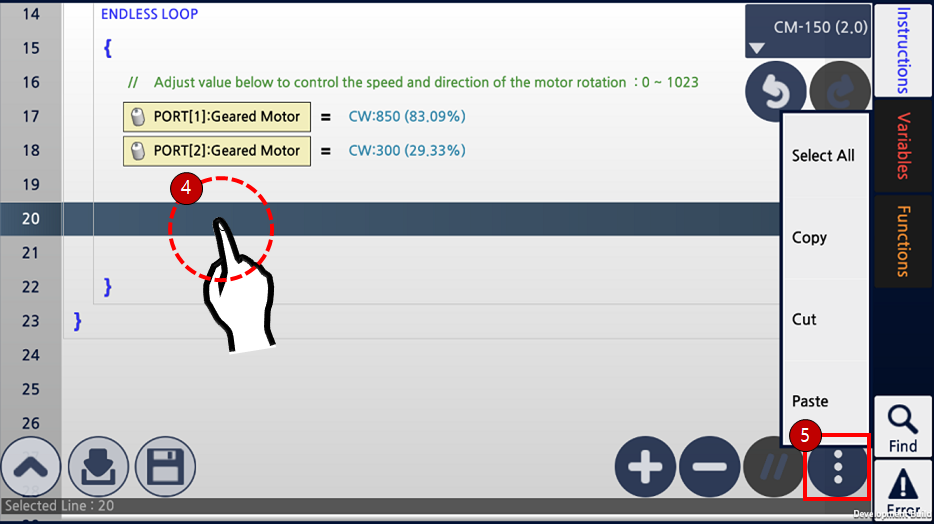
-
Select
Pasteto insert saved lines in the clipboard.
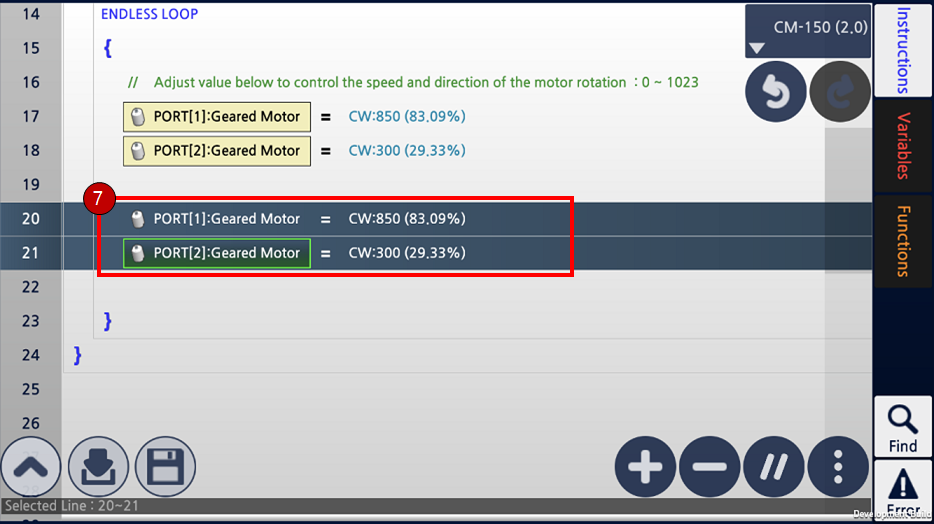
-
The code will be look like the below image.
Undo/Redo
-
While editing the code,
Undobutton will undo the recent change.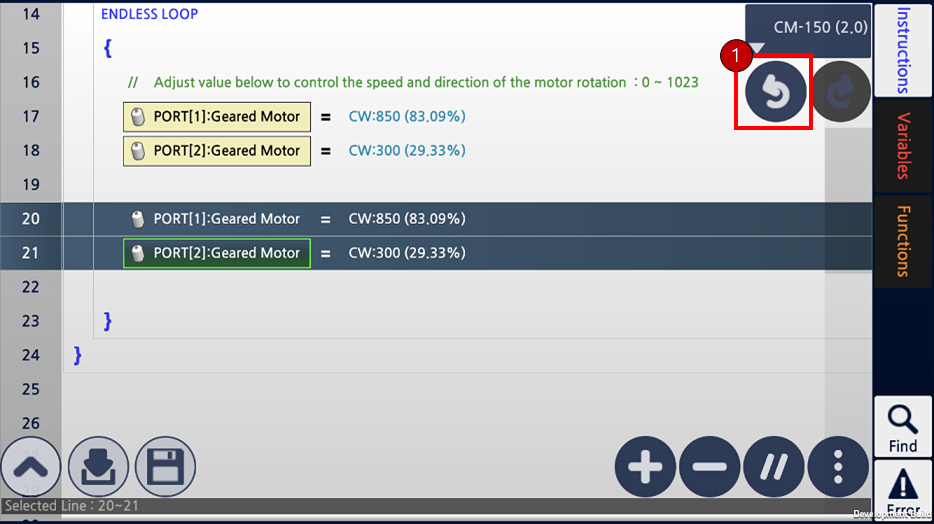
-
Redobutton will repeat the change made byUndo.
Programming(Instructions)
R+m.Task 2.0 uses identical instructions from R+Task 2.0.
Please refer to Programming(Instructions) section of the R+Task 2.0 manual.
Programming(Parameters)
R+m.Task 2.0 uses identical parameters from R+Task 2.0.
Please refer to Programming(Parameters) section of the R+Task 2.0 manual.
Useful Tips
Search Variables/Functions
User can easily search and rename Variables or Functions used in the source code.
- Select
VariablesorFunctionsbutton (There should be at least one variable or function to use this feature). - Select items to search in the
Variable Listor theFunction List. -
Tap the
Searchbutton in the below.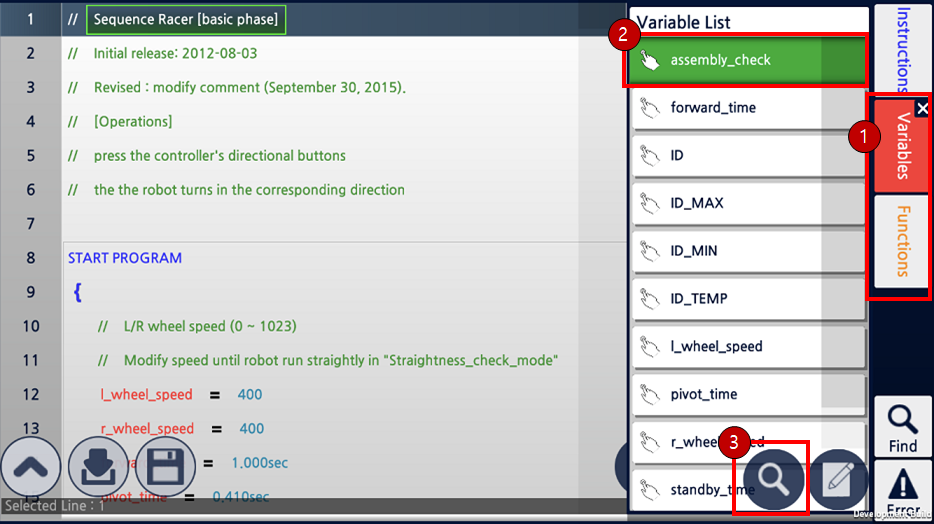
- Select an item in the
Reference Resultsto search. -
Close the search result by tapping the
Find Referencebutton.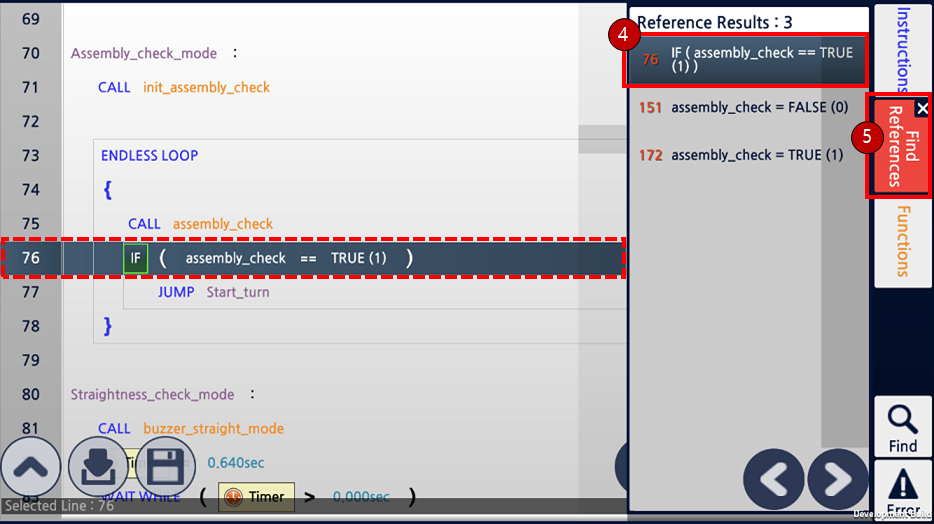
-
Use
Renamebutton to change the name of variable or function used in the source code.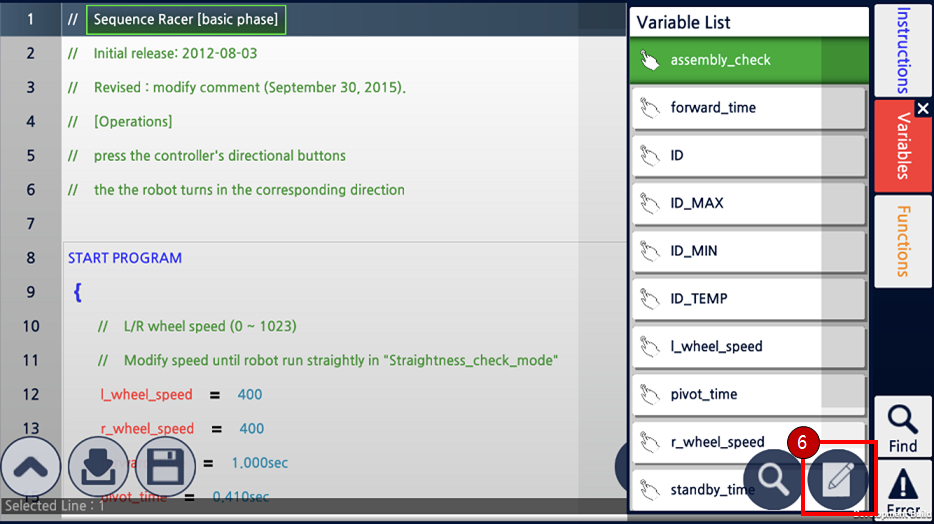
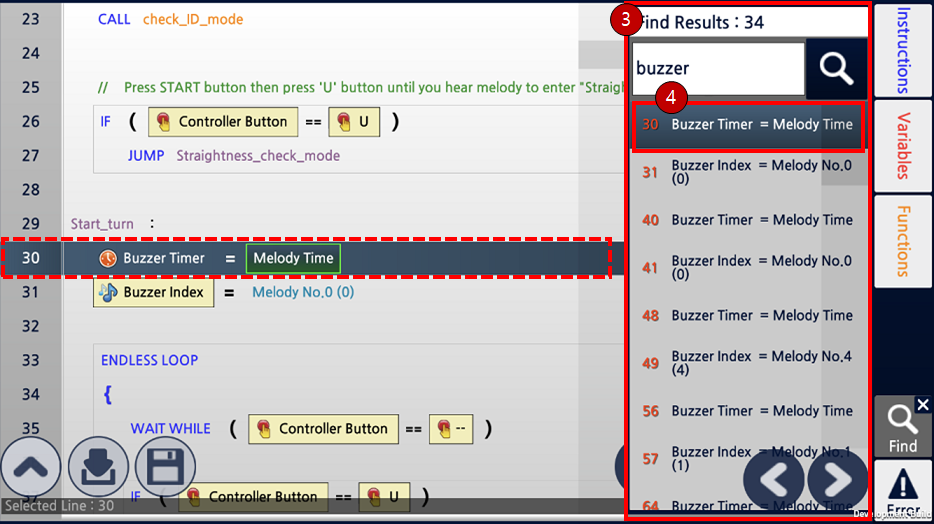
Search Keyword
User can also find a specific object in the source code.
- Select
Findbutton. -
Enter the term to search.

- The result will be listed.
-
Select an item to move to the code line.
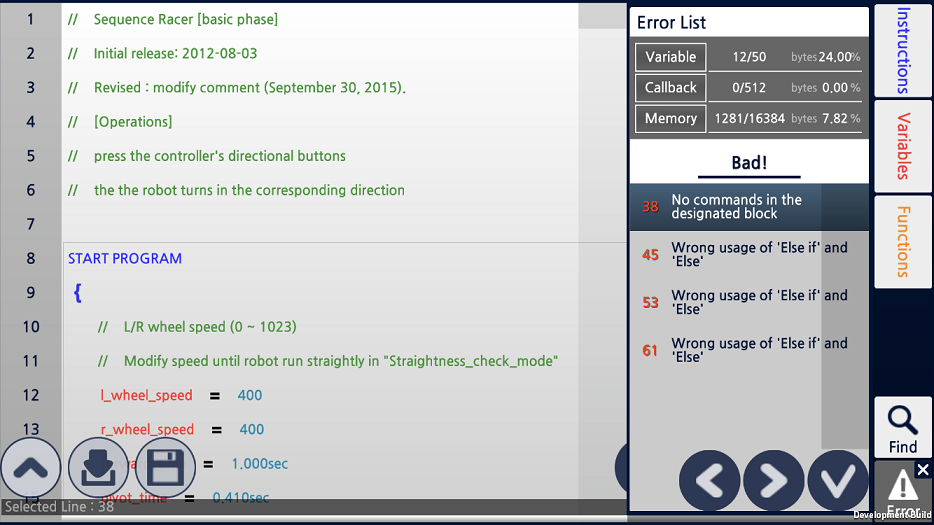
Grammar Check/Compile
In order to download the task code into the controller, syntax check and compile have to be done.
When try downloading or tapping Error button will perform the procedure automatically.
Syntax Check : This process check whether the instructions are valid and compatible to the selected controller. User must correct any errors listed in the result to proceed downloading.
Compile : After checking the syntax, this process will convert the source code into the machine language. During this process, number of variables and callbacks, and memory usage will be checked.
Copy Task to Android Devices
Task files written in the PC can be copied into Android devices.
- Use USB cable to connect Android device to PC (Proper Android drivers have to be installed on PC).
- Go to file explorer and open the Android Device.
- Open the
RoboPlusfolder. (IfRoboPlusfolder does not exist, create the folder manually.) - Copy the task file(*.tsk) into the
RoboPlusfolder. -
Launch the R+ m.Task 2.0 and select
Open Taskbutton.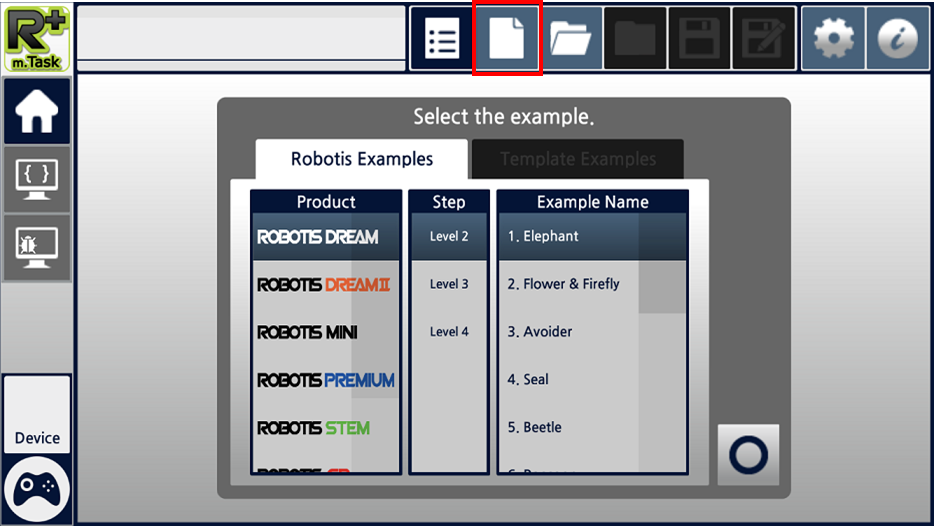
- Select the copied file and confirm the selection to open the file.
Copy Task to iOS Devices
Task files written in the PC can be copied into iOS devices.
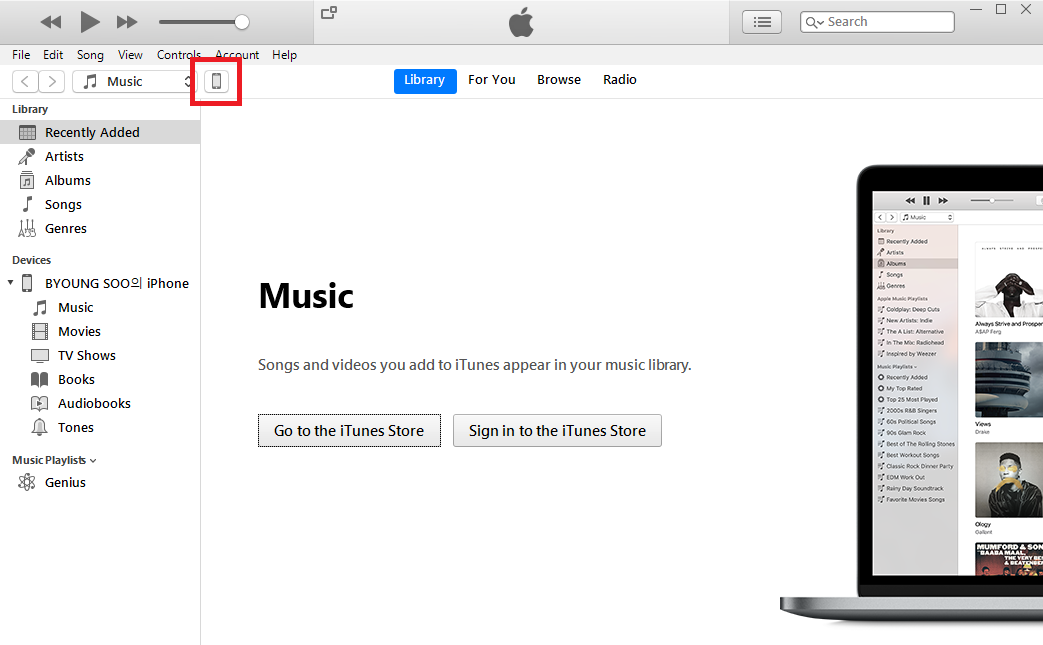
- Use USB cable to connect iOS device to PC (Proper drivers have to be installed on PC).
-
Launch iTunes on PC.
-
Select the connected device from the iTunes.
-
Select
File Sharingcategory on the left column.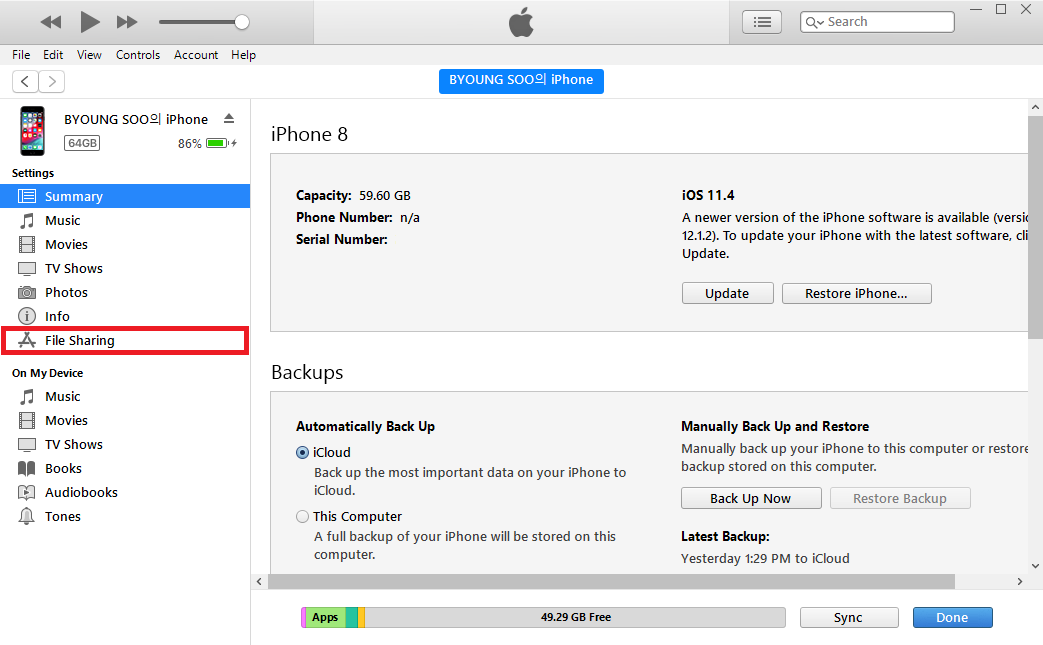
-
Wait for a while until Applications are listed, then select
R+ mTask2from the list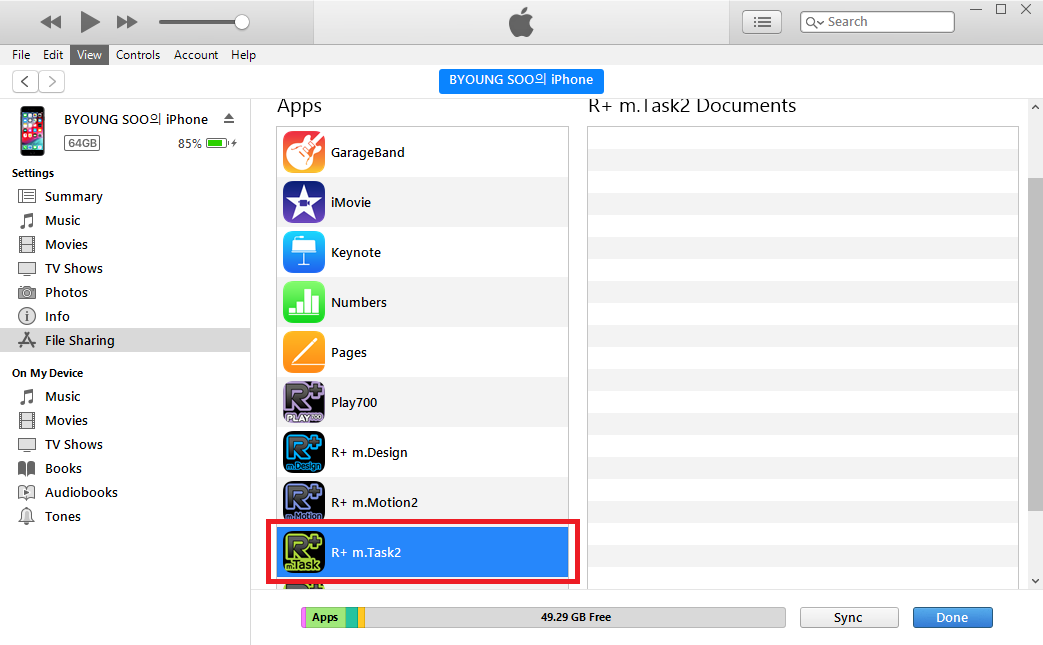
-
Drag and dropo the task file(*.tsk) on the document area on the right.
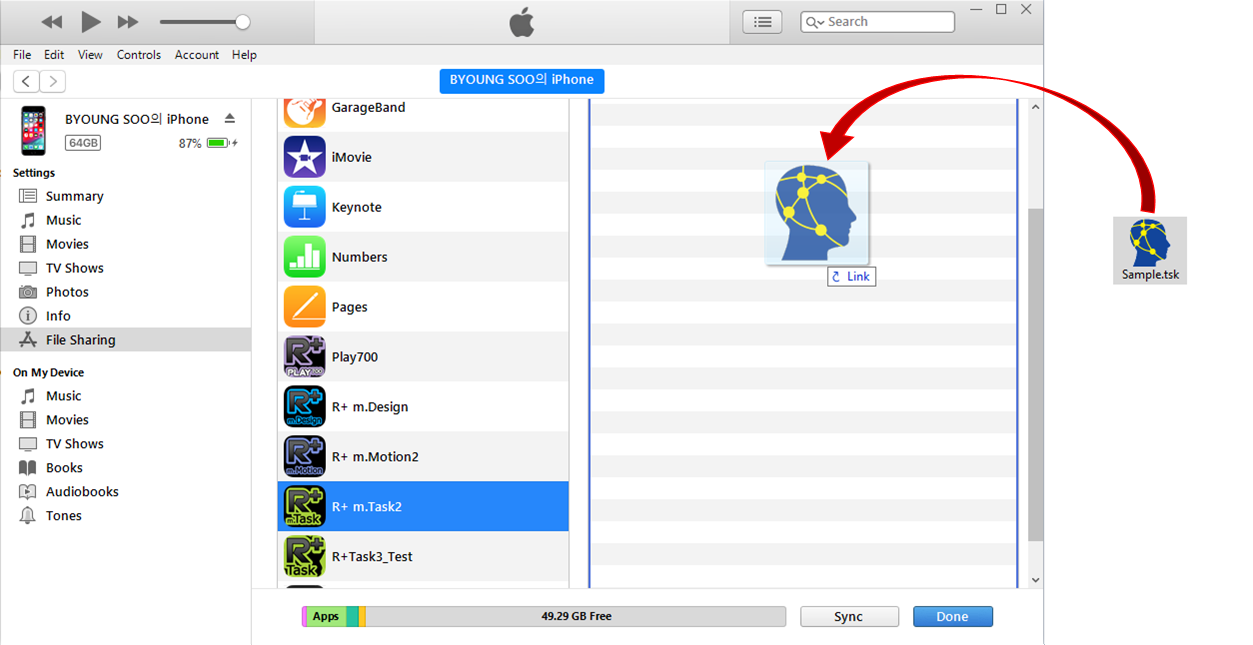
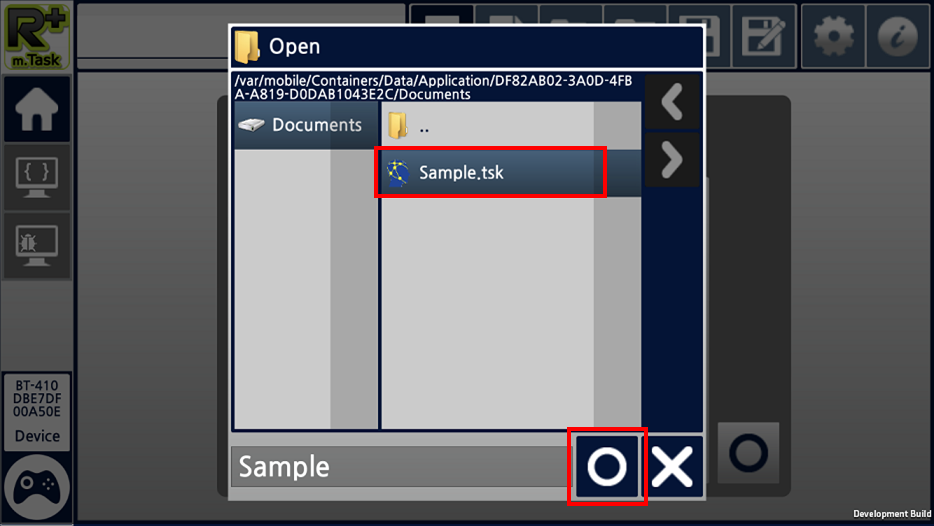
- Launch the R+ m.Task 2.0 and select
Open Taskbutton. -
Select the copied file and confirm the selection to open the file.
FAQ
Supported Products?
- See Product Compatibility Guide, and check if your controlelr is compatible with R+Task 2.0
Can TSK files that were used in the previous Task 1.0 also be used on Task 2.0?
- Yes. If the TSK file is loaded with Task 2.0 and saved, it will be converted to the TSKX file so it will no longer be compatible with Task 1.0.
The controller will not shut down after downloading a task.
- In R+ Task 2.0, downloaded task will be executed automatically. (For controllers : CM-150, OpenCM9.04, OpenCM7.0…)
Can I use Bluetooth module in R+ Task 2.0?
- Each controller could support different Bluetooth module, so please check the compatibility.
The controller does not connect well.
- Restart the controller by turning it off and then on, and try again. If the problem continues, please update the controller’s firmware to the latest version.
I do not want to see the help animation any more.
- Go to
Home Tab>Preferencesand uncheck theTutorial Animationunder the Miscellaneous.