
op3_walkingparam_msg
- File:
op3_walking_module_msgs/WalkingParam.msg] -
Message Definition
####### walking init pose ####### float32 init_x_offset float32 init_y_offset float32 init_z_offset float32 init_roll_offset float32 init_pitch_offset float32 init_yaw_offset ####### time parameter ##### float32 period_time float32 dsp_ratio float32 step_fb_ratio ########## walking parameter ######## float32 x_move_amplitude float32 y_move_amplitude float32 z_move_amplitude float32 angle_move_amplitude bool move_aim_on ########## balance parameter ########## bool balance_enable float32 balance_hip_roll_gain float32 balance_knee_gain float32 balance_ankle_roll_gain float32 balance_ankle_pitch_gain float32 y_swap_amplitude float32 z_swap_amplitude float32 arm_swing_gain float32 pelvis_offset float32 hip_pitch_offset ########## gain parameter ########## int32 p_gain int32 i_gain int32 d_gain - Description
These are the parameters used in the Walking Algorithm.
walking init pose
-
float32 init_x_offset
offset in the x-direction (front and back) [m]
-
float32 init_y_offset
offset in the y-direction (left and right) [m]
-
float32 init_z_offset
offset in the z-direction (up and down) [m]
-
float32 init_roll_offset
roll offset (x-coordinate) [rad]
float32 init_pitch_offset
pitch offset (y-coordinate) [rad]
float32 init_yaw_offset
yaw offset (z-coordinate) [rad]
time parameter
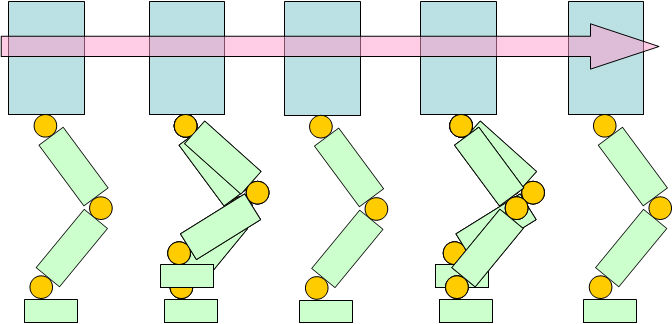
float32 period_time
Time required for ROBOTIS-OP3 to complete two full steps (left and right foot) [ms]
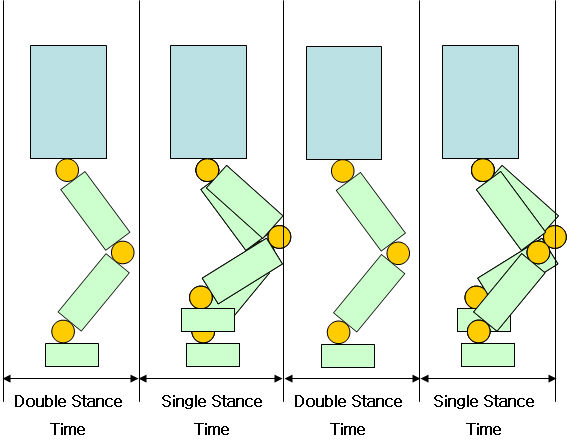
float32 dsp_ratio
Time ratio of the period when both feet are touching the ground to the period of walking cycle.
walking parameter
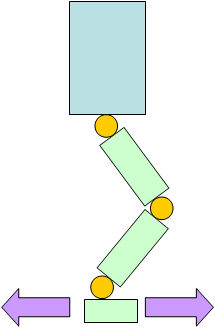
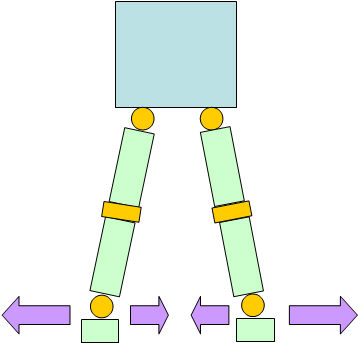
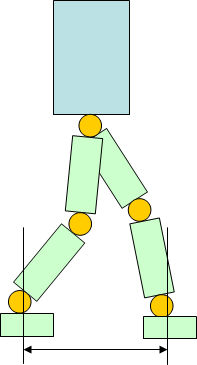
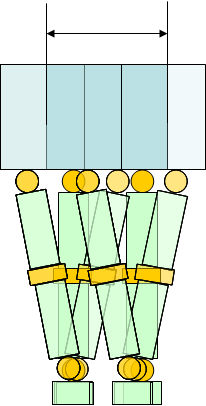
float32 x_move_amplitude
Differential distance (x-direction) between ROBOTIS-OP3’s left and right foot during walk [m]
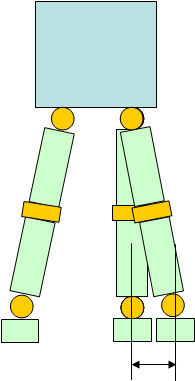
float32 y_move_amplitude
Differential distance (y-direction) between ROBOTIS-OP3’s left and right foot during walk [m]
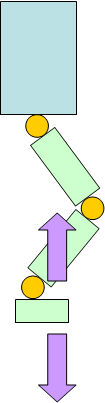
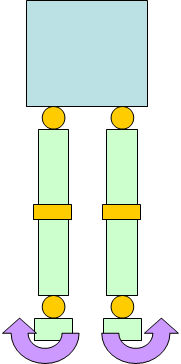
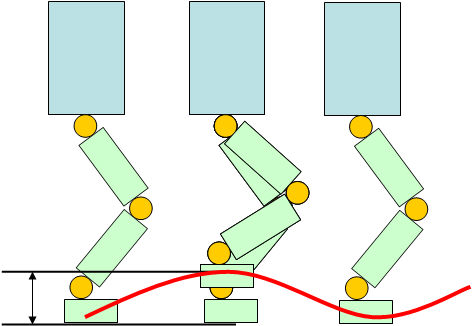
float32 z_move_amplitude
This is ROBOTIS-OP3’s foot elevation during walk
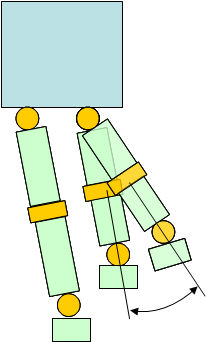
float32 angle_move_amplitude
Direction of ROBOTIS-OP3’s stepping (towards left or right). The head also aims at the direction [rad]
balance parameter
-
bool balance_enable
Turn on balance algorithm -
float32 balance_hip_roll_gain
Gain with respect to the gyroscope roll -
float32 balance_knee_gain
Gain with respect to the gyroscope pitch -
float32 balance_ankle_roll_gain
Gain with respect to the gyroscope roll -
float32 balance_ankle_pitch_gain
Gain with respect to the gyroscope pitch -
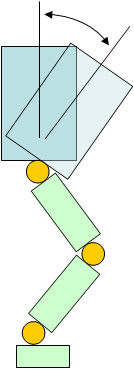
float32 y_swap_amplitude
swing to either left or right during walk [m]
-
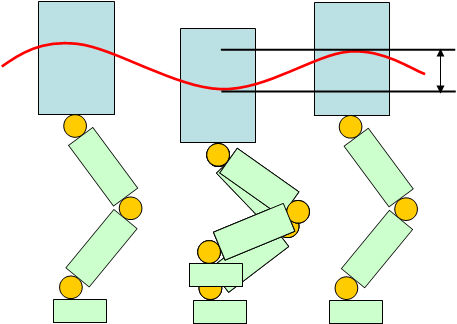
float32 z_swap_amplitude
up and down body swing during walk [m]
-
float32 arm_swing_gain
Arm swing gain with respect to Step forward/back. If the left foot moves forward then the right arm swings. -
float32 pelvis_offset
roll offset (x-coordinate) at the pelvis level. Values are for DYNAMIXEL position values for hip roll joints [rad]
-
float32 hip_pitch_offset
pitch offset (y-coordinate) at the hip level. Values are for DYNAMIXEL position values for hip pitch joints. [rad]
gain parameter
-
int32 p_gain
not yet implemented -
int32 i_gain
not yet implemented -
int32 d_gain
not yet implemented