Introduction
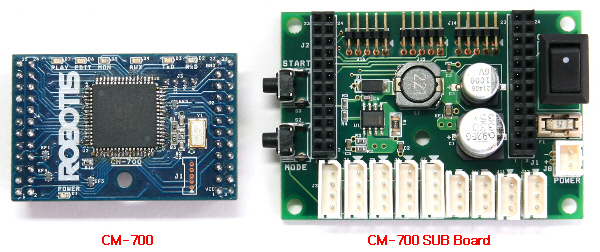
CM-700
- CM-700 is a control module type controller with a CPU, TTL / RS485 communication circuit and ZIG-110 connector. You cannot control dynamixels or other peripheral devices alone with the CM-700. You will need a SUB board.
- CM-700 SUB Board is composed of a power department, connector department, switch, and an additional circuit for 5 pin peripheral devices.
- You may refer to the connector pin layout to make your own SUB board.
Specifications
| Item | Description |
|---|---|
| Weight | 37.3g |
| CPU | ATMega2561 |
| Voltage Supply | Range : 7V ~ 35V |
| Current Consumption | Standby : 40mA External I/O Max Current : 0.9A Total Max Current : 10A(Fuse) |
| Operation Temperature | -5°C ~ 70°C |
| Internal I/O Device | Button x 2(Reset 1, Start 1) Voltage Sensor x 1 |
| External I/O Device | ROBOTIS 5-Pin Port x 6 DYNAMIXEL TTL 3Pin Connector x 4 DYNAMIXEL RS485 4Pin Connector x 5 |
![]()
DANGER
(Ignoring these warnings may cause serious injury or death)
- Never place items containing water, flammables/open flames, or solvents near the product.
- Never place fingers, arms, toes, and other body parts near product during operation.
- Cease operation and remove power from the product if the product begins to emit strange odors, noises, or smoke.
- Keep product out of reach of children.
- Check input polarity before installing or energizing wiring or cables.
![]()
CAUTION
(Ignoring these warnings may cause mild injury or damage to the product)
- Always comply with the product’s offical operating environment specifications including input voltage, current, and operating temperature.
- Do not insert blades or other sharp objects during product operation.
![]()
ATTENTION
(Ignoring these warnings may cause minor injury or damage to the product)
- Do not disassemble or modify the product.
- Do not drop the product or apply strong impacts.
- Do not connect or disconnect DYNAMIXEL cables while power is being supplied.
Layout
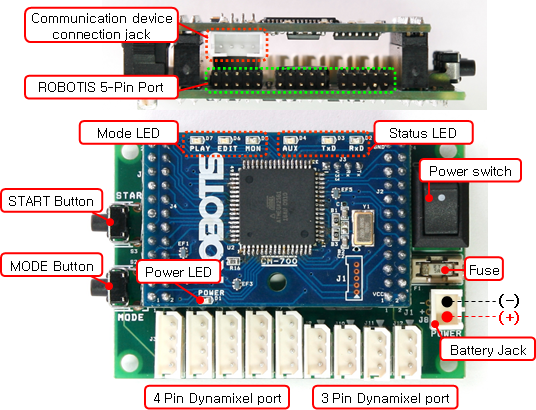
- PC Link (Serial Cable) & Communication Device Connection Port : LN-101 is used to connect the CM-700 and PC. It is used to download task code or communicate with PC. Also, it can be used for wireless communication module such as ZIG-110 etc., or communication with other external board.
- Battery Socket : Socket for connecting the battery.
- Power LED : ON and OFF LED for the power.
- Power Switch : Used to turn the robot ON / OFF.
- MODE Button : Used to change the operation mode of CM-700. Please read below for more information.
- START Button : Used to START selected mode. Please read below for more information.
- 3-Pin Cable Connector : Used to connect DYNAMIXEL’s using 3 pin cable(TTL Communication) in a daisy chain method.
- 4-Pin Cable Connector : Used to connect DYNAMIXEL’s using 4 pin cable (RS-485 Communication) in a daisy chain method.
- ROBOTIS 5-Pin Port : Used to connect peripheral devices such as DMS, Touch Sensor, and IR Sensor etc.
- Mode Display LED : LED to display current operation mode of CM-700. Detailed descriptions are provided as below.
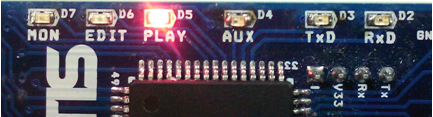
- MON
- It displays DYNAMIXEL Management Mode is in progress.
- It is used to set or test the operations of CM-700 and DYNAMIXEL using RoboPlus Manager.
- It is automatically executed when RoboPlus Manager and CM-700 are connected.
- EDIT
- It displays the motion edit mode is in progress.
- It is used when the motions are editted with RoboPlus Motion.
- It is automatically executed when RoboPlus Motion and CM-700 are connected.
- PLAY
- It displays the task edit mode is in progress.
- It is used after downloading the written code to CM-700 with RoboPlus Task.
- The Start button must be pressed directly by the user to execute When PLAY LED flickers.
- Status Display LED : The LED represents the current status of CM-700. Detailed discriptions are provided as below.
- [TxD] : Turned on while CM-700 is transmitting the data to the outside.
- [RxD] : Turned on while CM-700 is receiving the data from the outside.
- [AUX] : Assigned LED to be used by the user in the program. It can be turned on or off using task code.D to be used by the user in the program. It can be turned on or off using task code.
Pinout
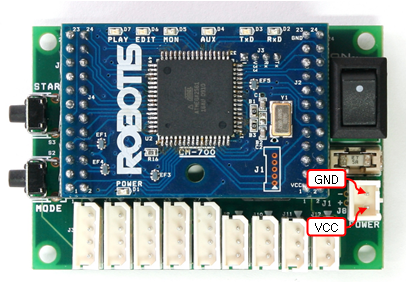
Power
The pin composition of CM-700 power is as below.
External 5-Pin Port
Users can create a sensor to control and connect to the 5 pin peripheral device connection port. However, composing the wrong circuits may damage your controller’s circuit, so please learn more about circuit before doing so.
Below is the 5 pin layout information for a peripheral device.
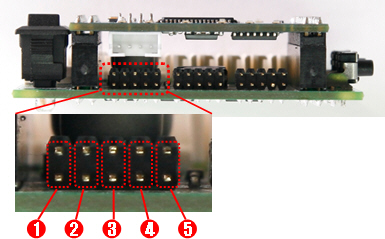
- OUT : 5V Output Possible (Maximum Allowed Current 0.9A)
- VCC (5V)
- ADC : The analog signals from the sensor made by the user can be read.
- GND
- NC : Not Used
Communication Device Connection Port
The functions of pins on the communication device connection port are as follows.
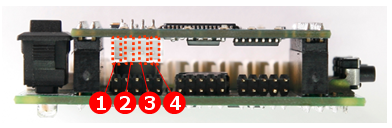
- TXD : Transmit Signal Terminal
- RXD : Receive Signal Terminal
- VCC : Supply Voltage (2.7 ~ 3.6V)
- GND : Ground Level (0v)
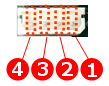
3-Pin Connector Port
The functions of pins on the 3-pin connector port are as follows. Please refer to Pin Assignment for more information.
Please be careful not to change the direction considering the angular part.

- GND : Ground Level (0v)
- VDD : Supply Voltage (It is equal to the voltage of battery)
- DATA : Data Transmission Pin
WARNING: To enhance user safety and to prevent proprietary risk or damage, be sure to check the pinout installed on DYNAMIXEL and the board. The Pinout of DYNAMIXEL may differ depending on a manufacturer of connector.
4-Pin Connector Port
The functions of pins on the 4-pin connector port are as follows. Pleaser refer to Pin Assignment for more information. (It is compatible with 4-pin of DX and EX Series.) Please be careful not to change the direction considering the angular part.
- GND : Ground Level (0v)
- VDD : Supply Voltage (It is equal to the voltage of battery)
- DATA+ : Data Transmission Pin
- DATA- : Data Transmission Pin
WARNING: To enhance user safety and to prevent proprietary risk or damage, be sure to check the pinout installed on DYNAMIXEL and the board. The Pinout of DYNAMIXEL may differ depending on a manufacturer of connector.
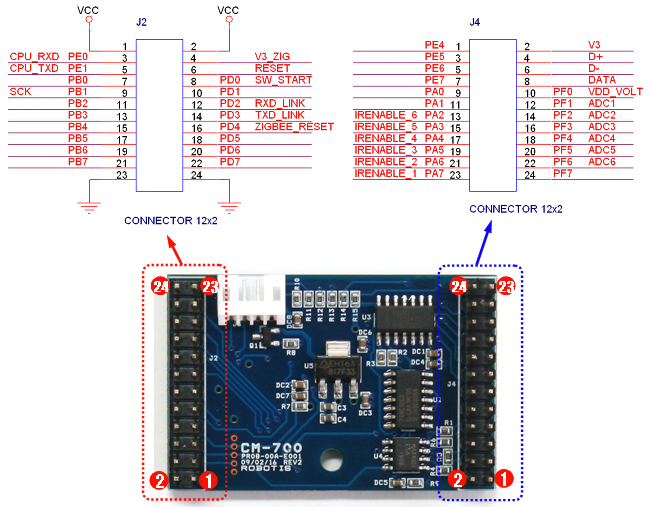
Sub-Board Connector Information
The pin layout of the connector which connects CM-700 and SUB board is as below.
Connecting Power
The CM-700 which consists of a micro-controller, is divided into a power department, various connectors, and SUB board. Depending on the connection of each board, the working voltage range may change so please refer to the below information to make your own battery.
- CM-700 + User’s Custom SUB Board
Because the CM-700 does not have a regulator, the power supply from the user’s custom SUB board to the CM-700 must be 5V.- CM-700 Working Voltage : 4.5 ~ 5.5 V
- CM-700 + CM-700 SUB Board
When connecting and using the CM-700 and ROBOTIS’s SUB board only, below is the allowed power range for the SUB board.- CM-700 + SUB Working Voltage : 7 ~ 35 V
- CM-700 + CM-700 SUB Board + DYNAMIXEL’s
Our SUB board has a comprehensive working voltage range to use all released dynamixel line-ups. Thus, the working voltage for the SUB board is restricted depending on the dynamixel you are using.- When using 2 or more different types of dynamixels together, the voltage range must be where all of the dynamixels can work. Thus, the minimum voltage should be the dynamixel’s highest voltage spec and the maximum voltage should be the lowest voltage to suit the working range.
- For example, when using the AX-12+ and RX-64 together, AX-12+ is 7 ~ 12 V, and RX-64 is ~ 18 V. Thus the working voltage would be 12V, meaning Li-Po conversion would be 3 cells and Ni-MH would be converted in 10 cells.
| DYNAMIXEL In Use | Min. Voltage | Max. Voltage | Li-Po Conversion | Ni-MH Conversion |
|---|---|---|---|---|
| AX-12A | 9 | 12 | 3 cells | 8 ~ 10 cells |
| DX-117 | 12 | 18.5 | 3 ~ 5 cells | 10 ~ 15 cells |
| RX-10 | 9 | 12 | 3 cells | 8 ~ 10 cells |
| RX-28 | 12 | 18.5 | 3 ~ 5 cells | 10 ~ 15 cells |
| RX-64 | 12 | 18.5 | 3 ~ 5 cells | 10 ~ 15 cells |
| EX-106+ | 12 | 18.5 | 3 ~ 5 cells | 10 ~ 15 cells |
| MX Series | 10 | 14.8 | 3 ~ 4 cells | 9 ~ 12 cells |
Connect the battery into the CM-700’s battery socket, and then set the power switch to supply power. Once the power is supplied, the POWER LED will turn on, and one of the MODE LED will start blinking.

How to Operate
- Turning the power on : The power is turned on by moving the switch from OFF to ON.
- Start : Move to PLAY using Mode Button to operate robots. Press START Button to execute when the LED on PLAY flickers.
※ If START button is pressed, the LED on PLAY is not supposed to be flickering any more; that is the normal status of the execution. -
End : If you want to stop the executed operations, press MODE Button to get back to waiting mode stauts, or turn OFF the power using Power Switch.
- It is used to control DYNAMIXEL and the peripherals, and it can connect DYNAMIXEL(AX-12A, AX-18A, AX-S1, DX-Series, RX-Series, EX-Series) and various parts of OLLO(Touch Sensor, LED Module, IR Sensor etc.).
-
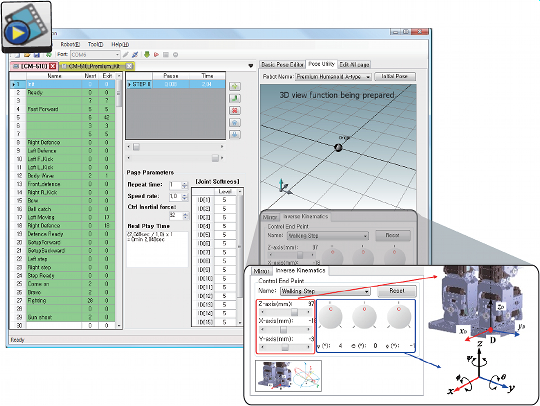
Specific motions can be edited and saved through RoboPlus Motion. The saved motion (mtn file) can be always executed by RoboPlus Task, and also the motions of each part can be controlled by writing the task codes for control.
- RoboPlus Motion
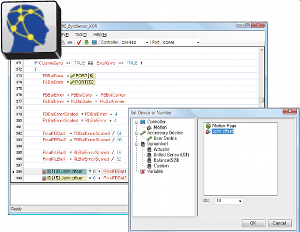
- RoboPlus Task
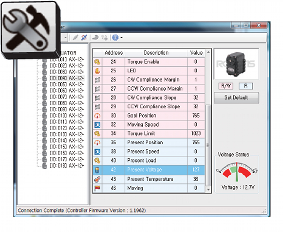
- RoboPlus Manager
- Embedded C
The controller of CM-700 can be controlled in C language. Please refer to Embedded C for more information.
Connect to PC
For the PC and CM-700 to communicate, LN-101 must be connected to CM-700 Port.

Wireless Communication
ZIG-110 wireless communication module can be connected to CM-700.
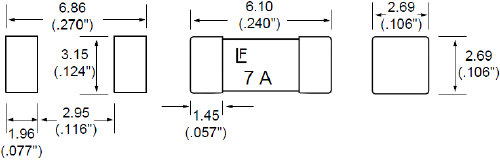
Fuse Replacement
There is a fuse to prevent from damaging the circuit due to over current.
If the CM-700 does not turn on, there is a high chance your fuse is blown. Replace the fuse right away.
※ The fuse size of CM-700 is as below, and you may use a product with a capacity between 125V / 5A ~ 10A. (It is the same as CM-510)