
StepPositionData_msg
-
File:
thormang3_walking_module_msgs/StepPositionData.msg -
Message Definition
int16 moving_foot int16 LFootMove = 1 # Left foot constant int16 RFootMove = 2 # Right foot constant int16 NFootMove = 3 # No foot constant ### Unit [meter, rad] float32 foot_z_swap float32 body_z_swap float32 torso_yaw_angle_rad PoseXYZRPY left_foot_pose PoseXYZRPY right_foot_pose PoseZRPY body_pose -
Description
Position related Step Data Parameters-
int16 moving_foot
Flag for Moving Foot
The flag should be set to one of the following values.
- LFootMove : constant for the left foot move
- RFootMove : constant for the right foot move
- NFootMove : constant for no foot move -
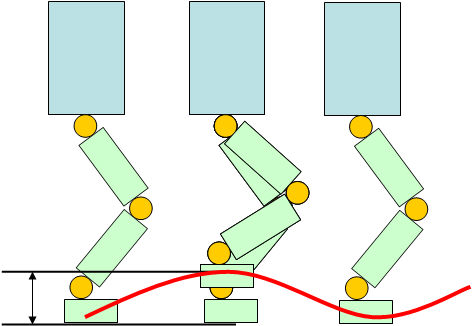
float32 foot_z_swap
The swept distance by the foot on the Z axis while THORMANG3 is walking. Unit in meter.
-
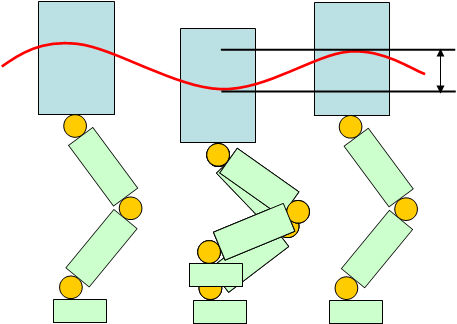
float32 body_z_swap
The swept distance by the body on the Z axis while THORMANG3 is walking. Unit in meter.
-
float32 torso_yaw_angle_rad
Waist target angle for upcoming step. Unit in rad(Not supported. This parameter is not used.) -
PoseXYZRPY left_foot_pose(thormang3_walking_module_msgs/PoseXYZRPY)
Target pose of the left foot for upcoming step. Unit in meter, rad. -
PoseXYZRPY right_foot_pose(thormang3_walking_module_msgs/PoseXYZRPY)
Target pose of the right foot for upcoming step. Unit in meter, rad. -
PoseZRPY body_pose(thormang3_walking_module_msgs/PoseZRPY)
The target COB for upcoming step. Unit in meter, rad.
-