
Edit on GitHub
OpenMANIPULATOR-X

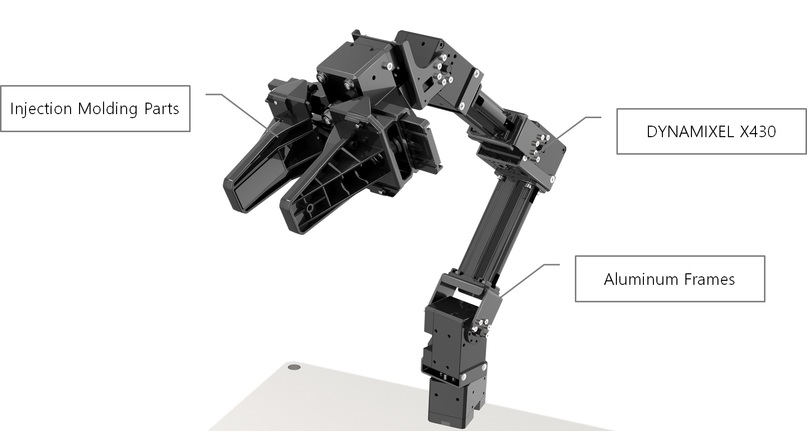
Feature
- Low Cost, High Repeatability, 500g Max Payload
- Precision Servo Control (DYNAMIXEL-X series) with Feedback
- Modular Structure and All-in-One Design
- Easy to Use with PC or Embedded Boards
- Open Source Hardware (CAD) and Software (SDK)
- Low Weight Enables Integration with Mobile Robot Platforms
Specification
| Items | Unit | OpenMANIPULATOR-X |
|---|---|---|
| Actuator | DYNAMIXEL XM430-W350-T | |
| Input Voltage | V | 12 |
| DOF | - | 5 (4 DOF + 1 DOF Gripper) |
| Payload | g | 500 |
| Repeatability | mm | < 0.2 |
| Speed(Joint) | RPM | 46 |
| Weight | kg (lb) | 0.70 (1.54) |
| Reach | mm (in) | 380 (14.9) |
| Gripper Stroke | mm (in) | 20~75 (0.79~2.95) |
| Communication | - | TTL Level Multidrop BUS |
| Software | - | ROS, DYNAMIXEL SDK, Arduino, Processing |
| Main Controller | - | PC, OpenCR |
OpenMANIPULATOR-P
![]()

Feature
-
User Programmable Open-Source Manipulator System
-
Modular Platform for Easy Maintenance and Customization
-
No External Control Box & High Weight-to-Payload Ratio
Specification
| Item | OpenMANIPULATOR-P (RM-P60-RNH) |
|---|---|
| DOF | 6 |
| Payload | 3 kg |
| Reach | 645 mm |
| Repeatability | ±0.05 mm |
| Weight | 5.76 kg |
| Operating voltage | 24 V |
| Resolution | Joint 1 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse) Joint 2 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse) Joint 3 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse) Joint 4 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse) Joint 5 : -π(rad) ~ π(rad) , -303,750 ~ 303,750 (pulse) Joint 6 : -π(rad) ~ π(rad) , -303,750 ~ 303,750 (pulse) |
| DYNAMIXEL Pro Model Name |
Joint 1, 2 : PH54-200-S500-R (200W) Joint 3, 4 : PH54-100-S500-R(100W) Joint 5, 6 : PH42-020-S300-R (20W) |
| Operating Range | Joint 1 : -π(rad) ~ π(rad) Joint 2 : -π/2(rad) ~ π/2(rad) Joint 3 : -π/2(rad) ~ 3π/4(rad) Joint 4 : -π(rad) ~ π(rad) Joint 5 : -π/2(rad) ~ π/2(rad) Joint 6 : -π(rad) ~ π(rad) |
| Default ID | Joint 1 (ID:1), Joint 2 (ID:2), Joint 3 (ID:3), Joint 4 (ID:4), Joint 5 (ID:5), Joint 6 (ID:6) |
| Motor type | Brushless DC Servo(H54P Series), Coreless DC Motor(H42P Series) |
| Position sensor type | Absolute Encoder(for Homing), Incremental Encoder(for Control) |
| Communications | RS485 |
| Communication Baudrate | 1000000 bps |