

DYNAMIXEL PRO WARNING : DYNAMIXEL PRO has been discontinued.
Product Lineup
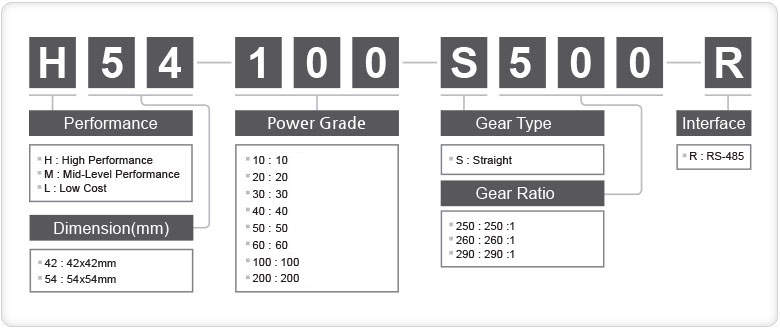
Product Lineup
-
Integrated robot-driving device: Contains all necessary features for robot joints integrated into a single module.
-
Strong and durable reduction cycloid gearing: DYNAMIXEL PRO implements removable reduction cycloid gears. Small and lightweight cycloids allow a high-ratio reduction gear device. Also cycloid gears are more resistant to vibrations and impacts resulting in minimal backlash.
-
Variety of models: DYNAMIXEL PRO motor, redactor, reduction ratio, communications type, etc have been accommodated to meet various price ranges. The user is able to choose the most proper DYNAMIXEL PRO model necessary for the robot.
-
Variety of control algorithms: DYNAMIXEL PRO position, velocity, and electrical current can be controlled via algorithms. The user can control these 3 aspects in any combination and properly tune the robot. DYNAMIXEL PRO provides a graph illustrating the relationship between electrical current and torque. This feature is useful for torque control via current control.
-
Precision control: with a maximum of 502,000 units per revolution the user can control 0.0007 degrees per unit allowing for high-precision control..
Key Specifications
| Model | Dimensions(mm) | Weight | Resolution | Motor |
|---|---|---|---|---|
| H54-200-S500-R H54-200-S500-R(A) |
54 x 126 x 54 | 855g | 501,923 | BLDC(Maxon) |
| H54-100-S500-R H54-100-S500-R(A) |
54 x 108 x 54 | 732g | 501,923 | BLDC(Maxon) |
| H42-20-S300-R H42-20-S300-R(A) |
42 x 84 x 42 | 340g | 303,750 | Coreless(Maxon) |
| M54-60-S250-R M54-60-S250-R(A) |
54 x 126 x 54 | 853g | 251,417 | BLDC(Maxon) |
| M54-40-S250-R M54-40-S250-R(A) |
54 x 108 x 54 | 710g | 251,417 | BLDC(Maxon) |
| M42-10-S260-R M42-10-S260-R(A) |
42 x 72 x 42 | 269g | 263,187 | Coreless(Maxon) |
| L54-50-S290-R | 54 x 108 x 54 | 656g | 207,692 | BLDC |
| L54-50-S500-R | 54 x 108 x 54 | 656g | 361,384 | BLDC |
| L54-30-S400-R | 54 x 108 x 54 | 612g | 288,395 | BLDC |
| L54-30-S500-R | 54 x 108 x 54 | 591g | 361,384 | BLDC |
| L42-10-S300-R | 42 x 72 x 42 | 257g | 4,096 | Coreless |
Communication Circuitry
Connection to UART
To control DYNAMIXEL PRO with a custom made Main Controller, the signal of Main Controller UART should be converted into RS-485 signal. The following is a recommended conversion circuit diagram.
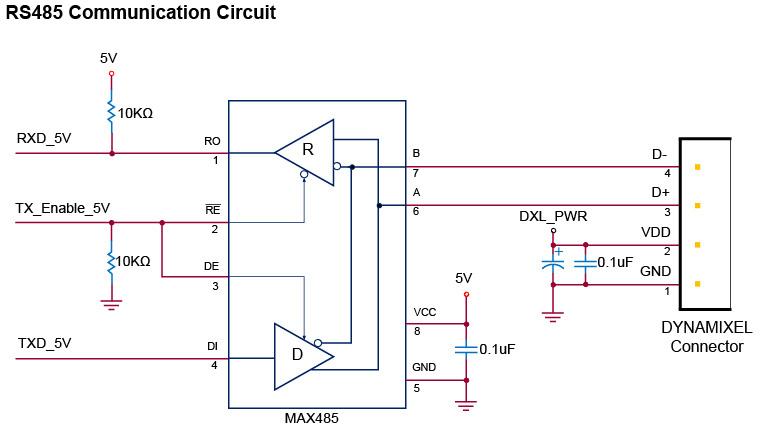
NOTE: Above circuit is designed for 5V or 5V tolerant MCU. Otherwise, use a Level Shifter to match the voltage of MCU.
The power is supplied via Pin1(-) and Pin2(+) of DYNAMIXEL. (The above circuit is built into DYNAMIXEL-only controllers)
In the above circuit diagram, the direction of data signal of TxD and RxD in the TTL Level is determined according to the level of TX_Enable_5V as follows:
- If
TX_Enable_5V= High : TheTXD_5Vsignal is transferred toD+andD-. - If
TX_Enable_5V= Low : TheD+andD-signals are transferred toRXD_5V.
Pin Arrangement
Connector pin arrangement is shown below.
DYNAMIXEL PRO has two 4-pin connectors arranged in pin-2-pin configuration.
In this arrangement there’s no priority in the connector order and DYNAMIXEL PRO can be driven like the MX-series.
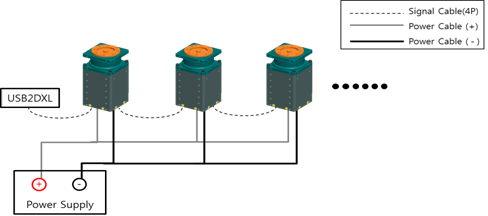
Additionally there is a 2-pin connector dedicated for power input for high-current operations.
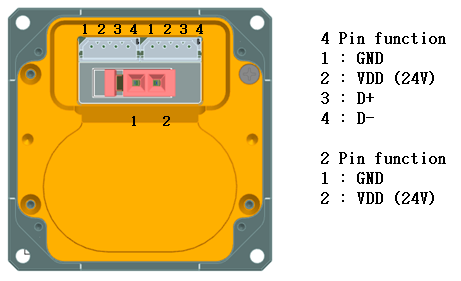
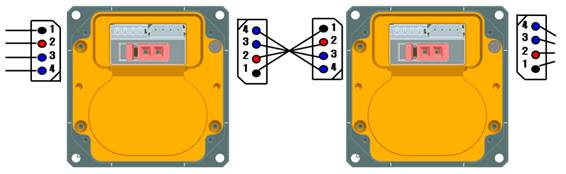
WARNING : When wiring please pay attention to the pin arrangement. Incorrectly connected DYNAMIXEL PRO may be damaged severely.
Confirmation of Connection
The LED of DYNAMIXEL pro flickers once if the power is supplied to DYNAMIXEL pro properly via wiring.