
Edit on GitHub
Servo Motor
Introduction
- It is connected to ROBOTIS’s controllers, and the direction of spin and the speed of spin can be adjusted through port control.
- If it is set to “Spin Mode,” it can be operated as the geared motor; if it is set to “Joint Mode,” the motor can be moved to the designated location by setting the speed of spin(Power)and the value of location.
- It is mainly used to maintain certain angles pursuant to some conditions such as moving joints, moving steering devices, etc.
Please refer to the Compatibility Guide below.
Compatibility Guide Controller Compatibility
Specifications
- Weight : 16g
- Dimensions : 18mm x 36mm x 27mm(with Horn)
- Gear Ratio : 194:1
- Speed : 85RPM @ 3.0V
- Position Sensor(Potentiometer)
- Safety Clutch installed
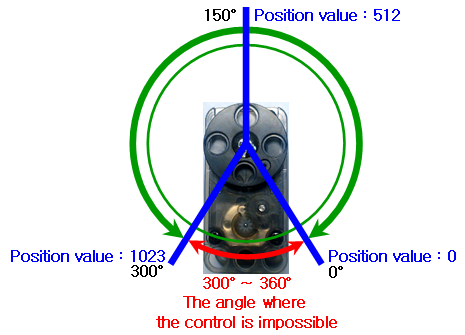
Control Angle
- The servo motor of OLLO can control the location from 0° to 300°, and the minimum control angle is about 0.29° (300°/1024).
- However, since the servo motor of OLLO is not as accurate as DYNAMIXEL, and the torque is weaker than DYNAMIXEL, it is appropriate servo motors are used for basic learning of the principles and usages; not appropriate to use for the places where accurate controls are needed.
Pinout
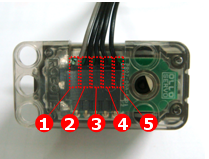
- MOT-
- GND
- ADC : The current location of the motor is printed out as analog signals
- VCC
- MOT+
CAUTION : Cables can be damaged when connected imporperly(i.e. wrong orientation), or when use excessive force during connection.
Tutorials
- RoboPlus Task : Please refer to Servo Motor section in the Roboplus Task.
- Available Addresses
- Operation Mode
- Speed
- Position