
Edit on GitHub
[ROS 2] Tools
RH-P12-RN Gripper
Parts List
| Part Name | Quantity | |
|---|---|---|
| Necessary Parts | OpenMANIPULATOR-P | 1 |
| RH-P12-RN (Gripper) | 1 | |
| Chassis Parts | FRP42_A110K | 1 |
| Cables | CABLE_4P_180MM | 1 |
| Miscellaneous | WB_M3X08_NYLOK_K | 12 |

Assembly Manual
-
Fix FRP42_A110K to the tip of OpenMANIPUALTOR-P with eight WB_M3X08_NYLOK_K screws.
-
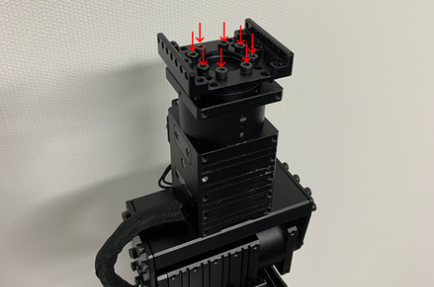
Assemble RH-P12-RN Gripper on fixed frame(FRP42_A110K) and tighten four WB_M3X08_NYLOK_K screws.

NOTE : There are two more holes on the other side for screws.
-
Connect OpenMANIPULATOR-P and RH-P12-RN with CABLE_4P_180MM Cable.

Operation
[ROS 2] Tool Applications Operation for ROS 2 Dashing Diademata will be released soon!
Simulation
[ROS 2] Tool Applications Simulation for ROS 2 Dashing Diademata will be released soon!