
[ROS] Operation
GUI Program
NOTE:
- The test is done on
ROS Kinetic Kameinstalled inUbuntu 16.04. - The test is done on
ROS Melodic Moreniainstalled inUbuntu 18.04. - Make sure ROS dependencies are installed before performing these instructions - Install ROS Packages
- Make sure to run the OpenMANIPULATOR-P controller instructions before running the instruction below.
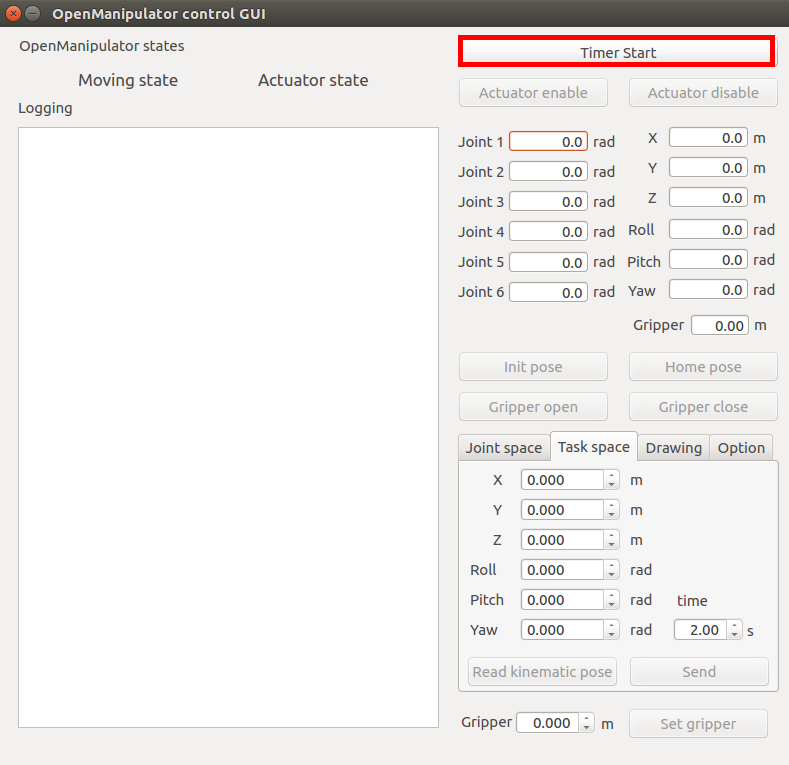
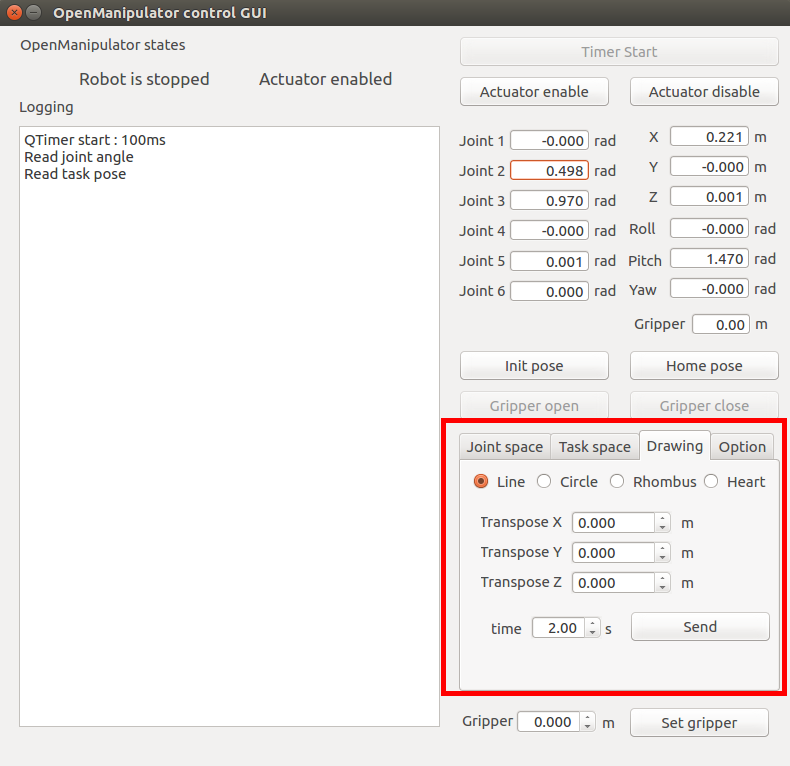
You can use the GUI program to manipulate OpenMANIPULATOR-P. Launch open_manipulator_p_control_gui node. This program shows the status of and allows users to control OpenMANIPULATOR-P.
$ roslaunch open_manipulator_p_control_gui open_manipulator_p_control_gui.launch
To controll OpenMANIPULATOR-P, first click the Timer Start button.
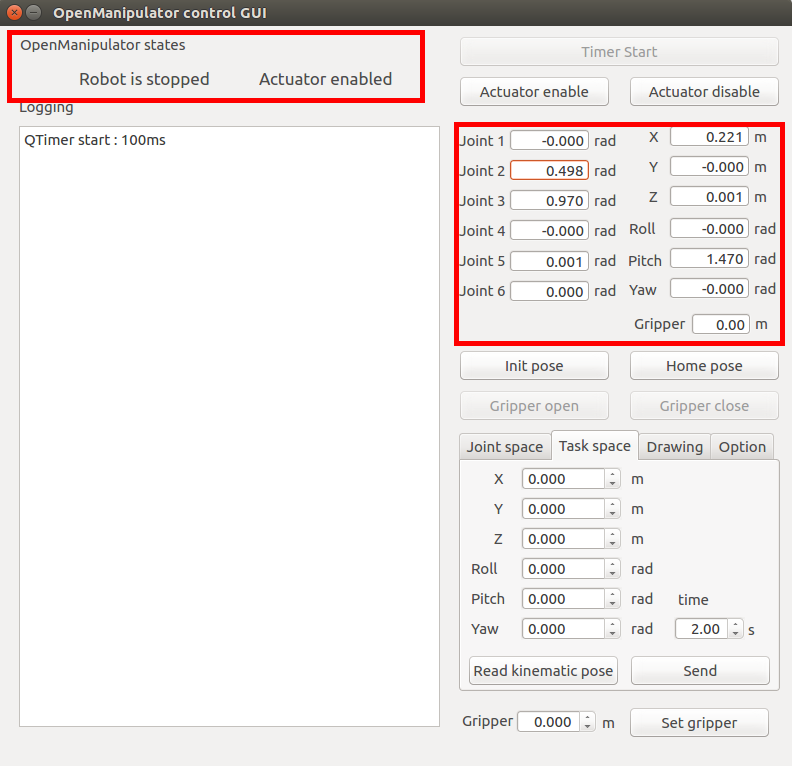
Check the status of the OpenMANIPULATOR-P (joint states, kinematics pose).
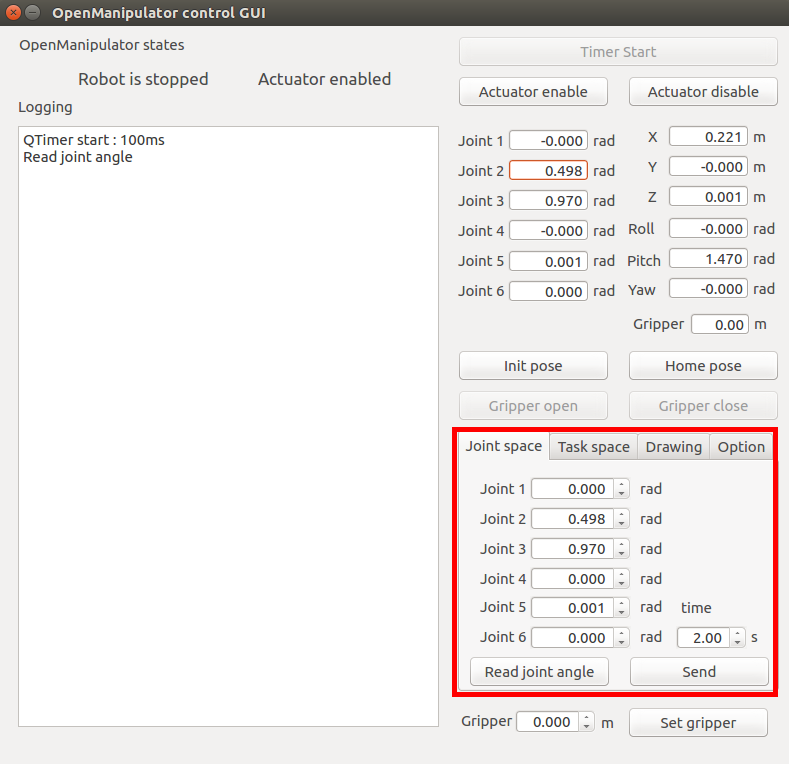
To manipulate the OpenMANIPULATOR-P in the joint space. Enter the joint angles and total time of the trajectory. Then click the send button.
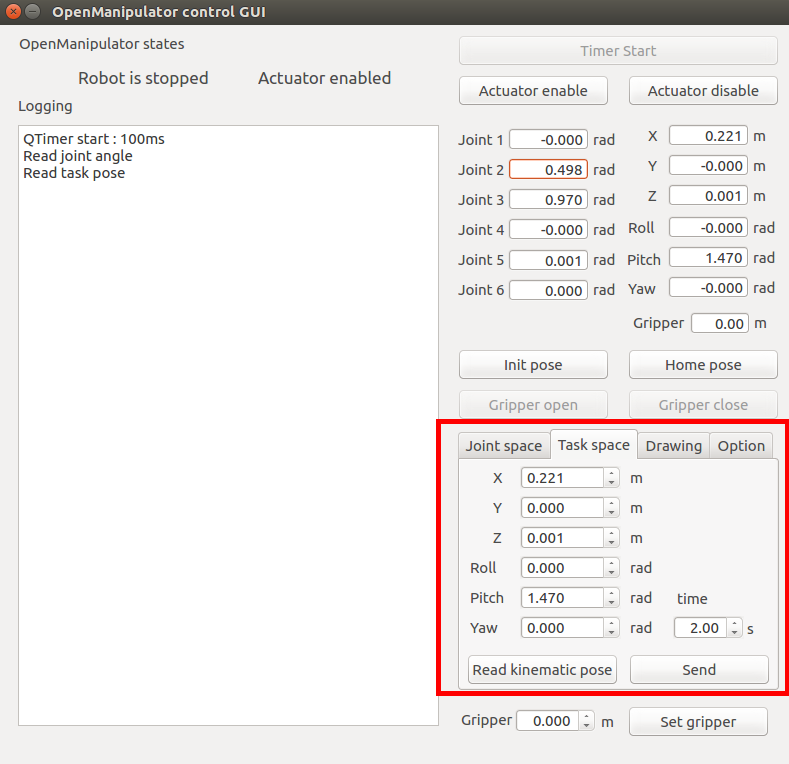
To manipulate the OpenMANIPULATOR-P in the task space. Enter the kinematics pose of the OpenMANIPULATOR-P end-effector(tool) in the task space and the total time of the trajectory. Then click the send button.
To create a drawing trajectory with OpenMANIPULATOR-P. First, choose the drawing trajectory type(line, circle, rhombus, heart). And enter the parameters according to the drawing trajectory type and the total time of the drawing trajectory. Then click the send button.
Teleoperation
NOTE:
- The test is done on
ROS Kinetic Kameinstalled inUbuntu 16.04. - The test is done on
ROS Melodic Moreniainstalled inUbuntu 18.04. - Make sure ROS dependencies are installed before performing these instructions - Install ROS Packages
- Make sure to run OpenMANIPULATOR-P controller instructions before use of the instruction
Keyboard
TIP: Terminal can be found with the Ubuntu search icon on the top left corner of the screen. Shortcut key for Terminal is Ctrl+Alt+t.
Launch open_manipulator_p_teleop_keyboard node for simple teleoperation test using the keyboard.
$ roslaunch open_manipulator_p_teleop open_manipulator_p_teleop_keyboard.launch
If the node is successfully launched, the following instruction will appear in the terminal window.
---------------------------------
Control Your OpenManipulator-PRO!
---------------------------------
w : increase x axis in task space
s : decrease x axis in task space
a : increase y axis in task space
d : decrease y axis in task space
z : increase z axis in task space
x : decrease z axis in task space
r : increase joint 1 angle
f : decrease joint 1 angle
t : increase joint 2 angle
g : decrease joint 2 angle
y : increase joint 3 angle
h : decrease joint 3 angle
u : increase joint 4 angle
j : decrease joint 4 angle
i : increase joint 5 angle
k : decrease joint 5 angle
o : increase joint 6 angle
l : decrease joint 6 angle
v : gripper open
b : gripper close
1 : init pose
2 : home pose
q to quit
-------------------------------------------------------------------------------
Present Joint Angle J1: 0.000 J2: 0.000 J3: 0.000 J4: 0.000 J5: 0.000 J6: 0.000
Present Kinematics Position X: 0.000 Y: 0.000 Z: 0.000
-------------------------------------------------------------------------------
PS4 Joystick
Install packages for teleoperation using PS4 joystick.
$ sudo apt-get install ros-kinetic-joy ros-kinetic-joystick-drivers ros-kinetic-teleop-twist-joy
$ sudo pip install ds4drv
Connect PS4 joystick to the PC via Bluetooth using the following command
$ sudo ds4drv
Enter pairing mode with PS4 by pressing and holding Playstation button + share button for 10 sec. If the light on PS4 turns blue, enter the following commands in terminal and control OpenMANIPULATOR-P.
$ export ROS_NAMESPACE=/open_manipulator_p
$ roslaunch teleop_twist_joy teleop.launch
$ roslaunch open_manipulator_p_teleop open_manipulator_p_teleop_joystick.launch
XBOX 360 Joystick
Install packages for teleoperation using XBOX 360 joystick.
$ sudo apt-get install xboxdrv ros-kinetic-joy ros-kinetic-joystick-drivers ros-kinetic-teleop-twist-joy
Connect XBOX 360 joystick to the PC with Wireless Adapter or USB cable, and launch teleoperation packages for XBOX 360 joystick.
$ sudo xboxdrv --silent
$ export ROS_NAMESPACE=/open_manipulator_p
$ roslaunch teleop_twist_joy teleop.launch
$ roslaunch open_manipulator_p_teleop open_manipulator_p_teleop_joystick.launch