
[ROS] Tools
RH-P12-RN Gripper
Parts List
| Part Name | Quantity | |
|---|---|---|
| Necessary Parts | OpenMANIPULATOR-P | 1 |
| RH-P12-RN (Gripper) | 1 | |
| Chassis Parts | FRP42_A110K | 1 |
| Cables | CABLE_4P_180MM | 1 |
| Miscellaneous | WB_M3X08_NYLOK_K | 12 |

Assembly Manual
-
Fix FRP42_A110K to the tip of OpenMANIPUALTOR-P with eight WB_M3X08_NYLOK_K screws.
-
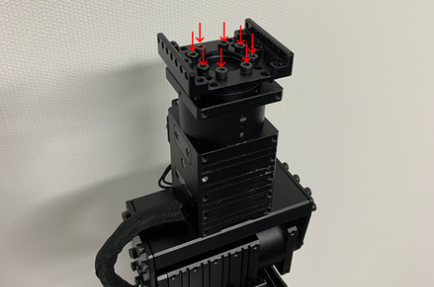
Assemble RH-P12-RN Gripper on fixed frame(FRP42_A110K) and tighten four WB_M3X08_NYLOK_K screws.

NOTE : There are two more holes on the other side for screws.
-
Connect OpenMANIPULATOR-P and RH-P12-RN with CABLE_4P_180MM Cable.

Operation
NOTE :
- The test is done on
ROS Kinetic Kameinstalled inUbuntu 16.04. - The test is done on
ROS Melodic Moreniainstalled inUbuntu 18.04. - Make sure ROS dependencies are installed before performing these instructions - Install ROS Packages
- Make sure to run the OpenMANIPULATOR-P controller instructions before running the instruction below
Please, open the Terminal then run roscore along with following command.
$ roscore
After running roscore, open another Terminal then write the following commands in Terminal.
$ roslaunch open_manipulator_p_controller open_manipulator_p_controller.launch with_gripper:=true
GUI Program
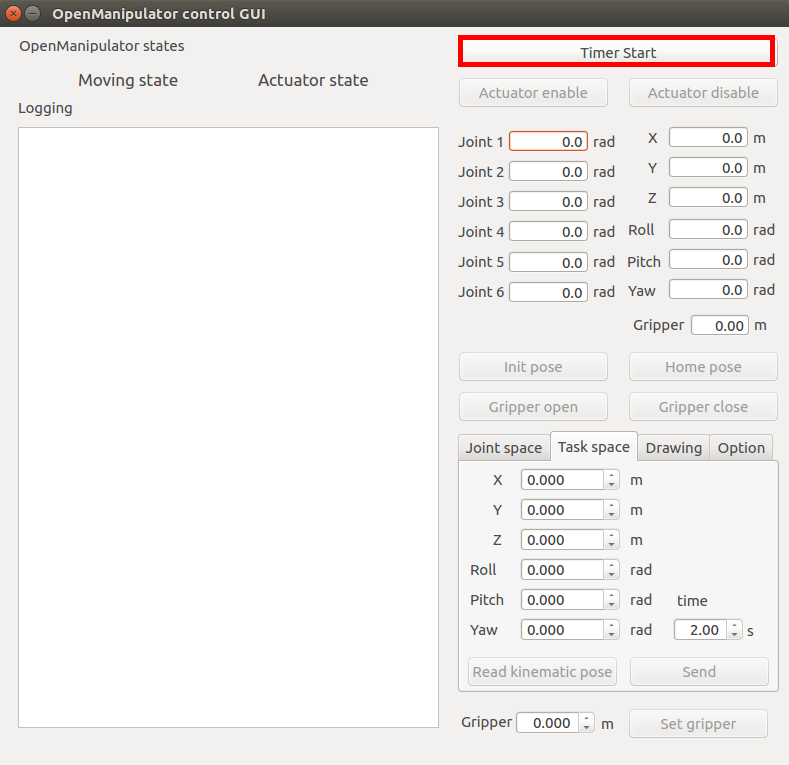
Launch open_manipulator_p_control_gui node. This program shows the status of and allows users to control OpenMANIPULATOR-P.
$ roslaunch open_manipulator_p_control_gui open_manipulator_p_control_gui.launch with_gripper:=true
To controll OpenMANIPULATOR-P with RH-P12-RN (Gripper), click the Timer Start button.
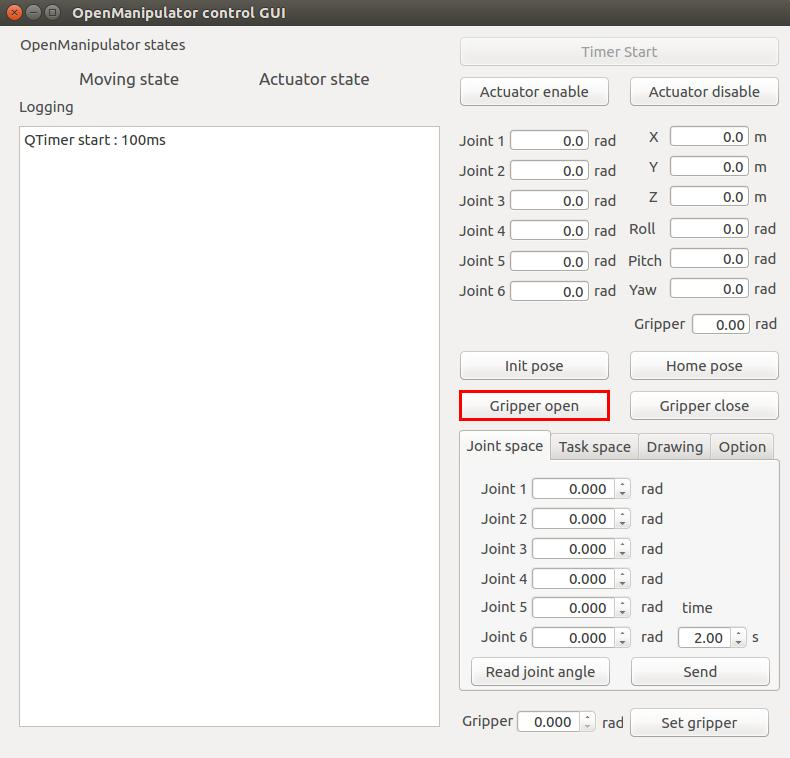
To activate RH-P12-RN (Gripper), Click the Gripper open button.
Teleoperation
Keyboard
$ roslaunch open_manipulator_p_teleop open_manipulator_p_teleop_keyboard.launch with_gripper:=true
PS4 & XBOX 360 Joystick
You can do Teleoperation with a joystic.
$ export ROS_NAMESPACE=open_manipulator_p
$ roslaunch teleop_twist_joy teleop.launch
$ roslaunch open_manipulator_p_teleop open_manipulator_p_teleop_joystick.launch with_gripper:=true
MoveIt!
$ roslaunch open_manipulator_p_controllers joint_trajectory_controller.launch sim:=false with_gripper:=true
Simulation
NOTE :
- The test is done on
ROS Kinetic Kameinstalled inUbuntu 16.04. - The test is done on
ROS Melodic Moreniainstalled inUbuntu 18.04. - Make sure ROS dependencies are installed before performing these instructions - Install ROS Packages
Launch Gazebo
Load OpenManipulator-PRO on Gazebo simulator
$ roslaunch open_manipulator_p_gazebo open_manipulator_p_gazebo.launch with_gripper:=true
Controller for Gazebo
Launch the open_manipulator_p_controller for gazebo simulation.
$ roslaunch open_manipulator_p_controller open_manipulator_p_controller.launch use_platform:=false with_gripper:=true