
Edit on GitHub
Gazebo Simulation
Install Gazebo
ROS-Gazebo Package Installation
Gazebo with ROS
Additional Installation
If ros-indigo-desktop-full was used to install, the following packages need to be installed.
# apt-get install ros-indigo-ros-control
# apt-get install ros-indigo-ros-controllers
# apt-get install ros-indigo-gazebo-ros-control
Run Simulation
How to set up & execute gazebo simulation
Recommendation
If Gazebo is running on the OPC, realtime factor can be decreased, therefore, it is recommended to use a separate PC for Gazebo.
How to execute
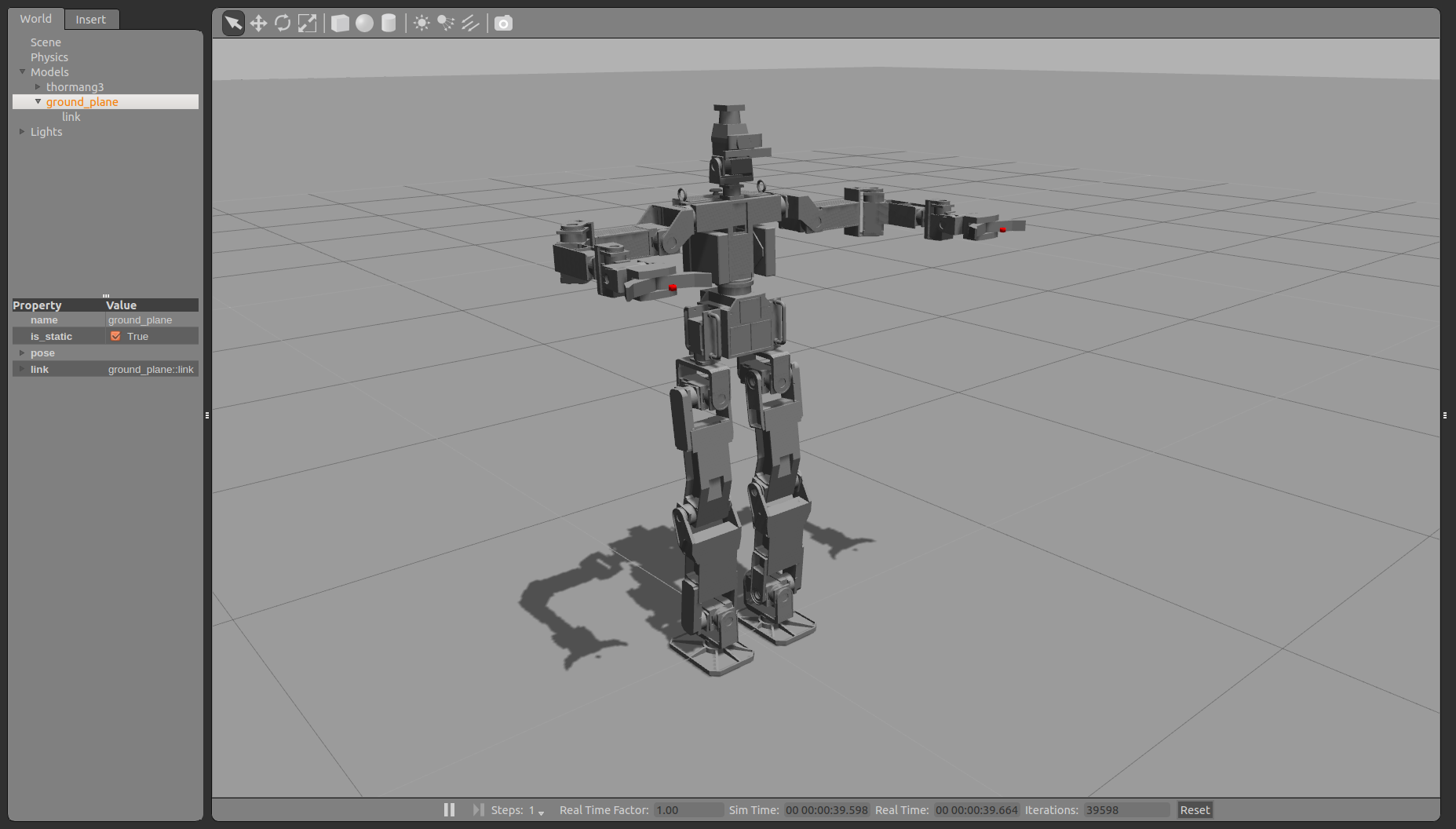
The command to call THORMANG3 in Gazebo
$ roslaunch thormang3_gazebo robotis_world.launch
[thormang3_manager] for Gazebo
-
Configure simulation setting in the launch file of the thormang3_manager
<param name="gazebo" value="true" type="bool"/>
<param name="gazebo_robot_name" value="thormang3"/> -
Launch thormang3_manager
$ roslaunch thormang3_manager thormang3_manager.launch -
Please refer to below tutorials for the rest procedures.
How to run THORMANG3’s program