
ROS Example
NOTE:
- This instructions has been tested on
Ubuntu 16.04andROS Kinetic Kame. - This instructions are supposed to be running on PC ROS packages installed in. Please run the instructions below on your PC ROS packages installed in.
Manipulator Manager
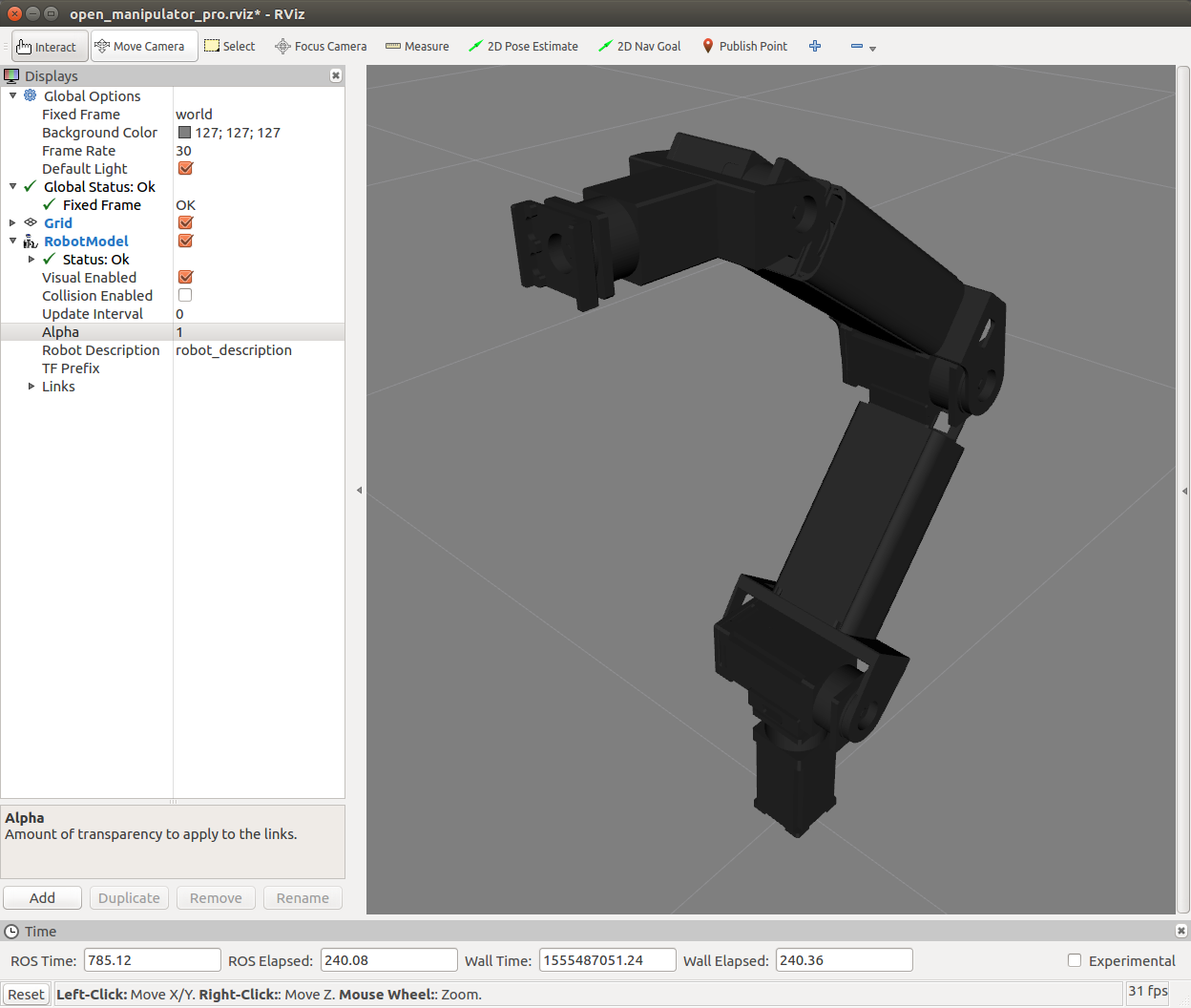
Bring up the robot in Rviz
$ roslaunch manipulator_h_bringup robotis_manipulator.launch
Run manipulator manager
$ sudo bash
[sudo] password for robotis:
# roslaunch manipulator_h_manager manipulator_h_manager.launch
If the manipulator manger has been launched successfully, the terminal will show the following message.
SUMMARY
========
PARAMETERS
* /gazebo: False
* /gazebo_robot_name: robotis_manipulat...
* /init_file_path: /home/user/catkin...
* /offset_table: /home/user/catkin...
* /robot_file_path: /home/user/catkin...
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
/
manipulator_h_manager (manipulator_h_manager/manipulator_h_manager)
ROS_MASTER_URI=http://localhost:11311
process[manipulator_h_manager-1]: started with pid [19408]
[ INFO] [1552279834.246020783]: manager->init
/dev/ttyUSB0 added. (baudrate: 1000000)
(/dev/ttyUSB0) [ID: 1] H54-200-S500-R added.
(/dev/ttyUSB0) [ID: 2] H54-200-S500-R added.
(/dev/ttyUSB0) [ID: 3] H54-100-S500-R added.
(/dev/ttyUSB0) [ID: 4] H54-100-S500-R added.
(/dev/ttyUSB0) [ID: 5] H42-20-S300-R added.
(/dev/ttyUSB0) [ID: 6] H42-20-S300-R added.
[ INFO] [1552279834.361381084]: Load offsets...
TIP:
- If you can’t load DYNAMIXEL’s, please check your DYNAMIXEL’s settings using this page.
GUI Program
Run GUI program
You can use the GUI program to manipulate the Manipulator-H.
$ rosrun manipulator_h_gui manipulator_h_gui
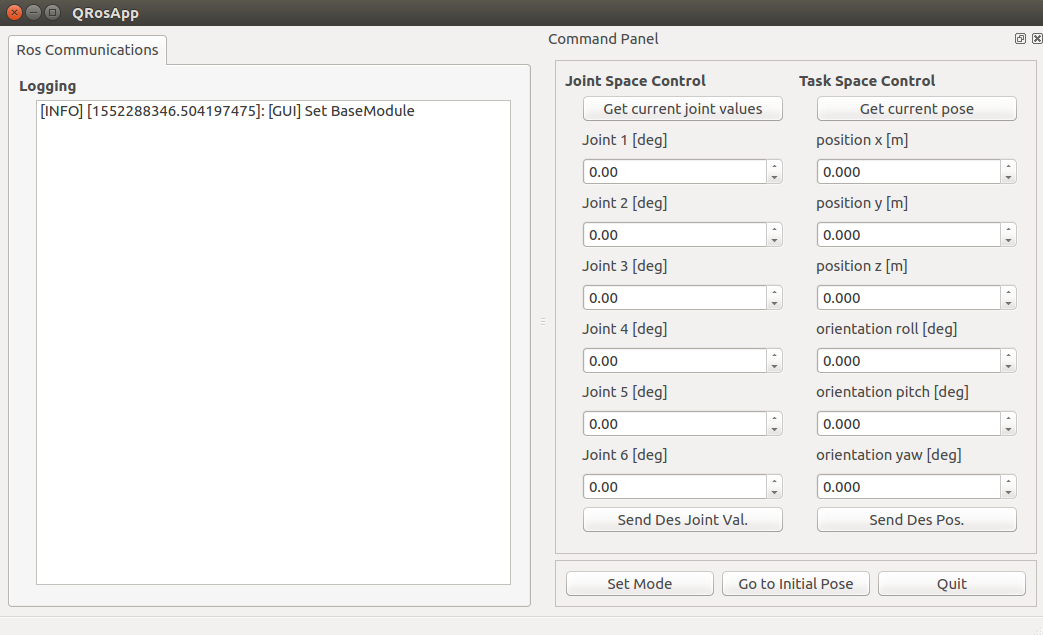
To control manipulator, first click the set mode button.
Set the manipulator to initial pose, click the go to initial pose button.
To check the joint angles of the manipulator, click the Get current joint values button. And To check the pose in the task space, click the Get current pose button.
To move the manipulator in the joint space. Enter the joint angles. Then click the Send Des Joint Val. button. And, to move the manipulator in the task space. Enter the kinematics pose of the end-effector(tool) in the task space. Then click the Send Des Pos. button.
Simulation
NOTE:
- The test is done on
ROS Kinetic Kameinstalled inUbuntu 16.04. - Make sure ROS dependencies are installed before performing these instructions - Install ROS Packages
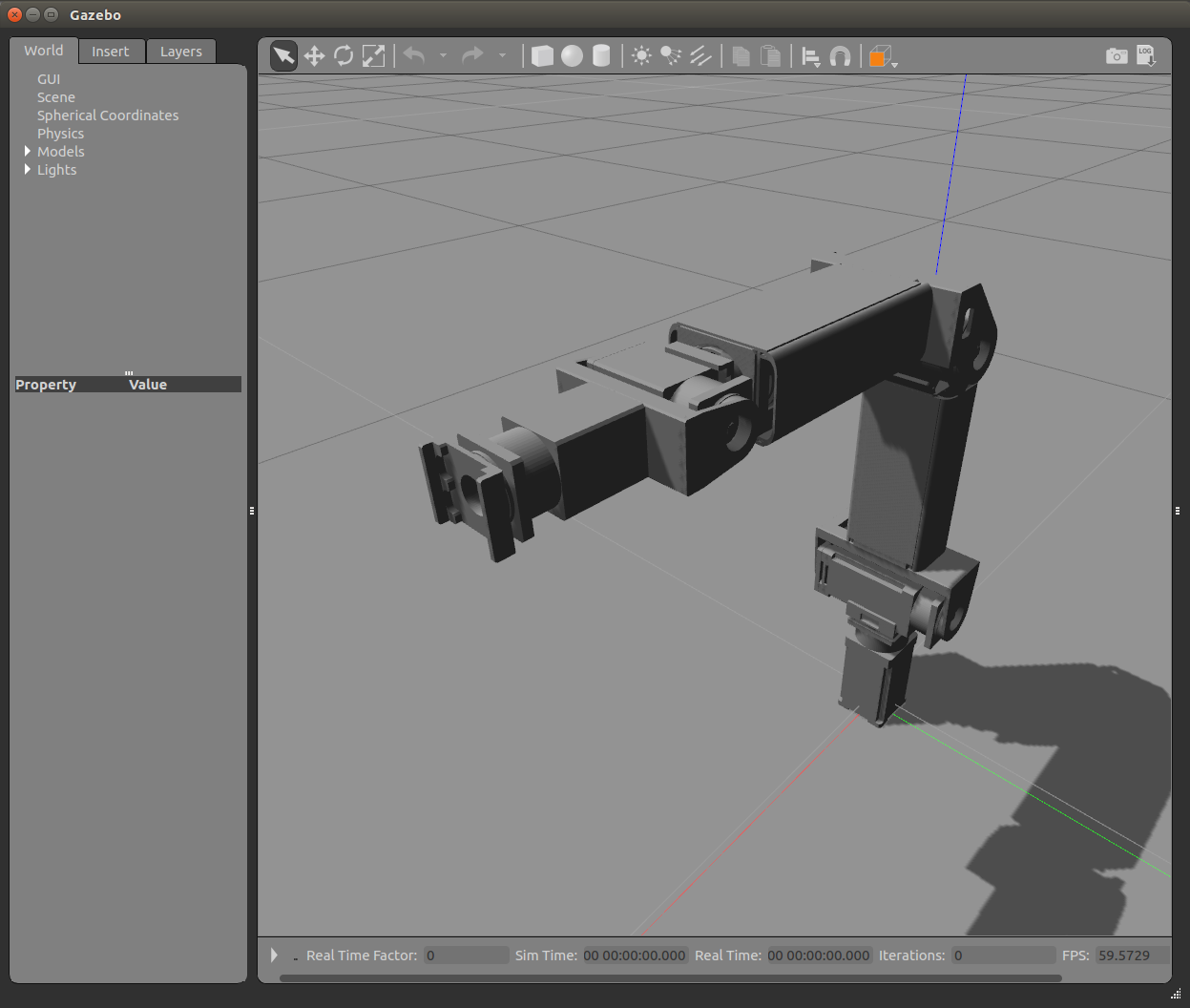
Launch Gazebo
Load the manipulator on Gazebo simulator and click on Play ▶ button.
$ roslaunch manipulator_h_gazebo manipulator_h_gazebo.launch
Manipulator manager for Gazebo simulator
$ roslaunch manipulator_h_manager manipulator_h_manager_gazebo.launch
If the manipulator manger has been launched successfully, the terminal will show the following message.
SUMMARY
========
PARAMETERS
* /gazebo: True
* /gazebo_robot_name: robotis_manipulat...
* /init_file_path: /home/user/catkin...
* /offset_table: /home/user/catkin...
* /robot_file_path: /home/user/catkin...
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
/
manipulator_h_manager (manipulator_h_manager/manipulator_h_manager)
ROS_MASTER_URI=http://localhost:11311
process[manipulator_h_manager-1]: started with pid [19408]
[ INFO] [1552279834.246020783]: manager->init
/dev/ttyUSB0 added. (baudrate: 1000000)
(/dev/ttyUSB0) [ID: 1] H54-200-S500-R added.
(/dev/ttyUSB0) [ID: 2] H54-200-S500-R added.
(/dev/ttyUSB0) [ID: 3] H54-100-S500-R added.
(/dev/ttyUSB0) [ID: 4] H54-100-S500-R added.
(/dev/ttyUSB0) [ID: 5] H42-20-S300-R added.
(/dev/ttyUSB0) [ID: 6] H42-20-S300-R added.
[ INFO] [1552279834.361381084]: Load offsets...