
Overview

ROS compatible OpenMANIPULATOR-X (RM-X52-TNM) is a robot platform consisting of Open Source Software, Open Source Hardware and is compatible with OpenCR(Embedded controller).
Other ROS/ROS2 Distro manuals
Download archived OpenMANIPULATOR-X emanual as of Dec 2024.
Download
Open Source Software
OpenMANIPULATOR-X supports ROS. The official ROS platform TurtleBot series has been supporting “TurtleBot Arm”. The OpenMANIPULATOR-X is fullly compatibile with TurtleBot3. Users can easily control it through the MoveIt! ROS package. Even if you do not have an actual robot, you can control the robot in the Gazebo simulator.
Open Source Hardware
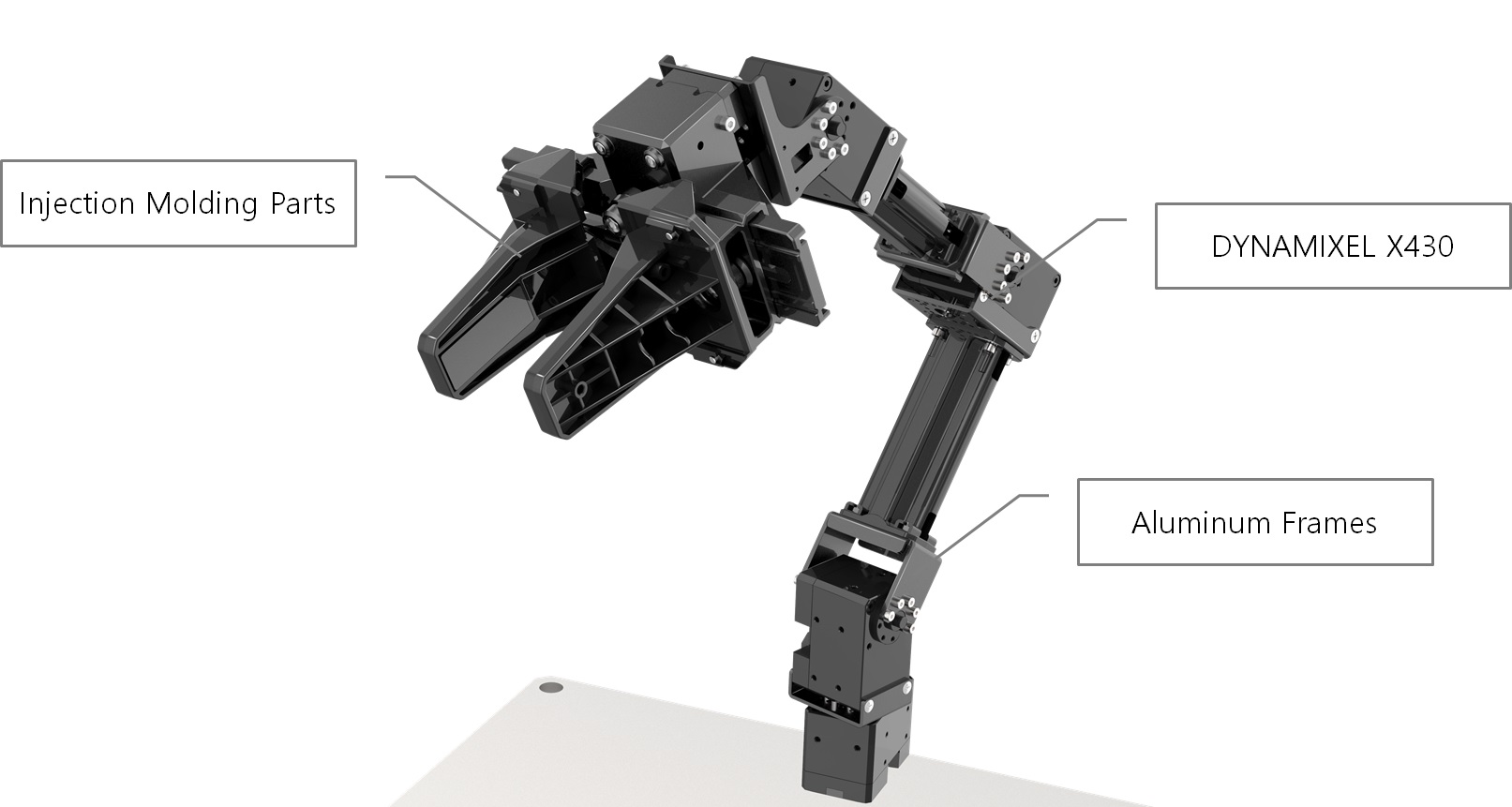
OpenMANIPULATOR-X (RM-X52-TNM) is an open source hardware oriented platform. Most of the components are uploaded as STL files so that users can easily create them using a 3D printer. It also allows users to modify the length of the links or the design of the robot for their own purposes. OpenMANIPULATOR-X (RM-X52-TNM) is made of DYNAMIXEL-X Series which is used in TurtleBot3.
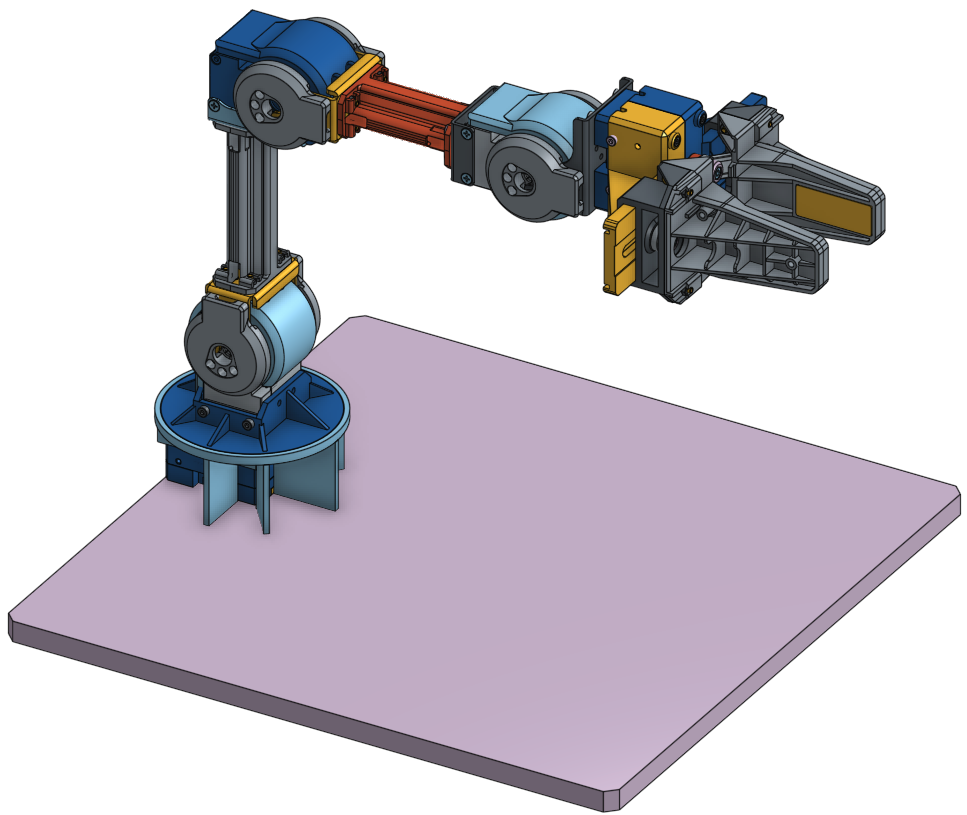
Base Plate is not included in the package
- If you want to develop on an embedded system, prepare OpenCR and PC.
- In order to run with ROS, prepare your PC and either the DYNAMIXEL Starter Set or OpenCR.
OpenCR (Embedded board)
OpenMANIPULATOR-X RM-X52-TNM can also be controlled using OpenCR (Open-source Control module for ROS), the control board used in TurtleBot3. The computing power and real-time controllability of OpenCR can support forward and inverse kinematics, and profile control examples.
DYNAMIXEL Examples
OpenMANIPULATOR-X RM-X52-TNM is composed of DYNAMIXEL-X series and 3D printing parts. DYNAMIXEL has a modular form and adopts the daisy chain method. It allows users to easily add or remove joints for their own use. Taking advantage of this characteristic, users can build seven different types of OpenMANIPULATOR-X series : Chain, SCARA, Link, Planar, Delta, Stewart and Linear.
Introduction Video
ROSCon 2017 Vancouver Day 1: Introducing OpenMANIPULATOR; the full open robot platform from OSRF on Vimeo.